Изобретение относится к устройствам для измерения расстояний, в частности расстояний, пройденных автомобилем, и может быть использовано, например, при геодезических измерениях на сухом несыпучем грунте.
Наиболее близким к изобретению является способ измерения расстояний, заключающийся в измерении оборотов вращения переднего колеса, формировании сигнала единичного приращения пути, установке значения этого единичного приращения пути для соответствующих условий движения, суммирование текущих значений пройденного расстояния, сравнении полученных значений расстояний с заданным, отображении информации о пройденном пути на индикаторе, измерении оборотов вращения заднего колеса, определение знака и величины разности оборотов вращения колес на основе сравнения относительно эталонного значения, отображении условий движения за счет вывода информации на контрольный индикатор, осуществлении коррекции значений единичного приращения пути в зависимости от знака и величины разности оборотов вращения колес [1].
Наиболее близким изобретением является устройство для измерения расстояния, пройденного автомобилем, содержащее закрепленные на переднем и заднем колесах первый и второй датчики пути, блок сравнения и счетчик пути, счетчик отрезков, счетчик пути выполнен в виде генератора импульсов, первой схемы сравнения, первого программного переключателя, первого счетчика импульсов и индикатора, блок сравнения выполнен в виде второго счетчика импульсов, второй схемы сравнения, второго программного переключателя и контрольного индикатора, причем выход первого датчика пути соединен через генератор импульсов с первым входом первой схемы сравнения и через счетчик отрезков с первым входом счетчика импульсов, второй вход которого соединен с выходом второго датчика пути, а выход - с первым входом второй схемы сравнения, выход первого переключателя соединен с вторым входом первой схемы сравнения, выход которой через накопитель соединен с входом индикатора, а выход второго программного переключателя соединен с вторым входом второй схемы сравнения, выход которой соединен с входом контрольного индикатора, первый и второй датчики пути закреплены на диагонально расположенных колесах [1].
Недостатком данных способа и устройства является низкая точность измерения пройденного пути, так как определение условий движения осуществляется на основе выбора в качестве информационного признака знака и величины разности оборотов вращения переднего и заднего колеса автомобиля, однако данный информационный признак зависит также и от состояния дорог, что не позволяет однозначно определить условия движения, кроме того, отсутствует автоматическая коррекция значений приращения пути исходя из анализа условий движения автомобиля
Технической задачей изобретения является повышение точности измерения пройденного расстояния.
Сущность изобретения состоит в том, что в способе измерений расстояний, заключающемся в измерении оборотов вращения переднего колеса, формировании сигнала единичного приращения пути, установке значения этого единичного приращения пути для соответствующих условий движения, суммировании текущих значений пройденного расстояния, сравнении полученных значений расстояний с заданным, отображении информации о пройденном пути на индикаторе, коррекции значений единичного приращения пути, дополнительно осуществляют анализ условий движения автомобиля на основе анализа знака и величины ускорений движущегося автомобиля и производят автоматическую коррекцию значений приращений пути исходя из условий движения автомобиля.
Заявляемый способ реализуется в устройстве для измерения расстояний, пройденного автомобилем, которое содержит закрепленный на колесе датчик пути, счетчик пути, выполненный в виде генератора импульсов, схемы сравнения программного переключателя, счетчик импульсов и индикатор, выход датчика пути соединен через генератор импульсов с первым входом схемы сравнения, выход программного переключателя соединен со вторым входом схемы сравнения, выход которой через счетчик импульсов соединен с входом индикатора и дополнительно имеет блок анализа условий движения, состоящий из датчика линейных ускорений, элемента И-НЕ, первого и второго диодов, n-первых пороговых устройств, n-вторых пороговых устройств, задатчика сигналов, причем выход датчика линейных ускорений одновременно соединен через элемент И-НЕ, первый прямо включенный диод и второй обратно включенный диод, соответственно, с первым входом программного переключателя, первыми входами n-первых пороговых устройств и n-вторых пороговых устройств, вторые входы которых соединены с n-выходами задатчиков сигналов, выходы n-первых и вторых пороговых устройств соединены соответственно со вторыми и третьими n-входами программного переключателя.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1) осуществляют анализ условий движения на основе анализа знака и величины ускорения автомобиля;
2) осуществляют автоматическую коррекцию единицы приращения пути в зависимости от условий движения автомобиля.
Существенными отличительными признаками по устройству являются блок анализа условий движений, состоящий из датчика ускорений, элементов И-НЕ, диодов, n-первых и n-вторых пороговых устройств, задатчика сигналов, и новые связи между ними.
Использование всех новых признаков позволит повысить точность измерения расстояния за счет анализа условий движения на основе анализа знака и величины ускорения и осуществления автоматической коррекции единицы приращения пути.
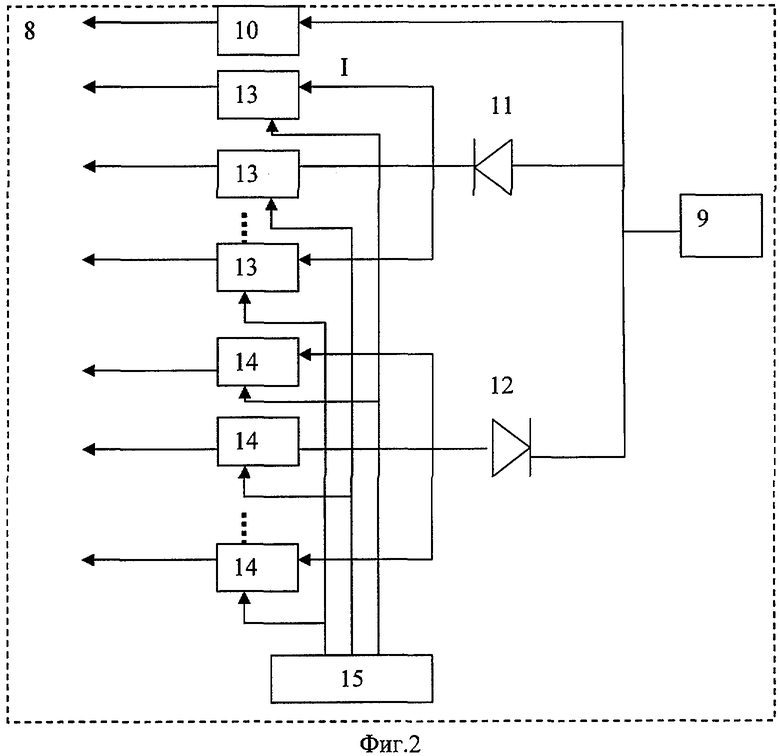
На фиг.1 показана схема устройства, реализующая предлагаемый способ, на фиг.2 - блок анализа условий движения автомобиля.
Устройство для измерения расстояния, пройденного автомобилем, содержит закрепленный на колесе датчик 1 пути, счетчик 2 пути, выполненный в виде генератора 3 импульсов, схемы 4 сравнения программного переключателя 5, счетчика 6 и индикатора 7, блок 8 анализа условий движения, состоящий из датчика 9 линейных ускорений, элемента 10 И-НЕ, первого 11 и второго 12 диодов, n-первых 13 пороговых устройств, n-вторых 14 пороговых устройств, задатчика 15 сигналов, причем выход датчика 1 пути соединен через генератор 3 импульсов с первым входом схемы 4 сравнения, выход программного переключателя 5 соединен со вторым входом схемы 4 сравнения, выход которой через счетчик 6 соединен с входом индикатора 7, выход датчика 9 линейных ускорений одновременно соединен через элемент 10 И-НЕ, первый 11 прямо включенный диод и второй 12 обратно включенный диод, соответственно, с первым входом программного переключателя 5, первыми входами n-первых 13 пороговых устройств и первыми входами n-вторых 14 пороговых устройств, n-вторые входы которых соединены с n-выходами задатчиков 15 сигналов, выход n-первых 13 и второго 14 пороговых устройств соединены соответственно со вторыми и третьими n-входами программного переключателя 5.
Каждый из датчиков пройденного пути представляет собой магнитоуправляемый контакт (пара: магнит - геркон). Генератор 3 импульсов высокой частоты может быть собран на микросхемах К155ИДЗ, К155ТМ2, К155ИД. Схемы 4 и 10 сравнения (четырехразрядные) могут быть собраны на элементах К155ИДЗ, К155ТМ2, К155ЛАЗ. Программные переключатели 5, 11 (четырехразрядные) состоят из четырех отдельных секций по числу набираемых цифр. В качестве индикатора 7 может быть использован, например, жидкокристаллический индикатор типа ИВ-1В.
Устройство работает следующим образом.
Датчик 1 оборотов колеса пропорционально пройденному пути автомобиля вырабатывает импульсы, каждый последующий из которых - результат единичного приращения пути. Значение этого единичного приращения пути для соответствующих условий устанавливается заранее первым программным переключателем 5, (например, для пашни, при дискретности съема информации с переднего колеса d=1, для автомобиля ГАЗ-66 - 3215 мм). Число разрядов программного переключателя 5 выбирается (устанавливается) в зависимости от требуемой точности, например для обеспечения точности 0,1% - 4 разряда. Импульсы с датчика 1 пути запускают высокочастотный генератор 3. Когда число импульсов, выработанных генератором 3, станет равным значению, установленному на программном переключателе 5, схема 4 сравнения остановит генератор. В результате сформируется пачка высокочастотных импульсов. Счетчик 6 импульсов прибавит к предыдущему значению число, равное единичному приращению пути (число, установленное программным переключателем). Значение единичного приращения пути подается на индикатор 7. Оно в цифровом виде отображает пройденный путь. Блок анализа условий движения автомобиля осуществляет коррекцию единичного приращения пути на основе анализа знака и величины ускорения от датчика линейных ускорений.
Если с выхода датчика линейных ускорений сигнал отсутствует, то с выхода элемента И-НЕ сигнал поступает на первый вход программного переключателя 5.
Если с выхода датчика 9 линейных ускорений поступает сигнал, то определение знака линейного ускорения осуществляется первым 11 прямо и вторым 12 обратно включенными диодами. С выхода диодов (11, 12) в зависимости от знака сигнал поступает на n-входы первых 13 или вторых 14 пороговых устройств.
Пороговые устройства (13, 14) осуществляют анализ величины ускорения на основе сравнения текущих значений поступающих с выхода диодов (11, 12) с заданными поступающими от задатчика 15 сигналов.
С выхода пороговых устройств 13, 14 сигналы поступают соответственно на вторые и третьи n-входы программного переключателя 5.
Таким образом, повышается точность измерения расстояния, проходимого автомобилем, на основе анализа знака и величины ускорения автомобиля и автоматической коррекции единичного приращения пути в зависимости от условий движения.
Источники информации
1. Авторское свидетельство СССР №1303827, кл. G01C 22/00, 19.07.1984 г. (прототип).
Изобретение относится к области измерительной техники и может применяться для измерения расстояний, пройденных наземным транспортным средством. Технический результат - повышение точности измерения. Для достижения данного результата осуществляют измерение условий движения автомобиля на основе оценки знака и величины ускорений движущегося автомобиля. При этом осуществляют автоматическую коррекцию значений приращения пути исходя из оценки условий движения автомобиля. Устройство для реализации способа содержит датчик и счетчик пути. При этом счетчик пути выполнен в виде генератора импульсов, схемы сравнения, программируемого переключателя, счетчика импульсов, индикатора. Кроме того, устройство содержит блок анализа условий движения автомобиля. 2 н.п. ф-лы, 2 ил.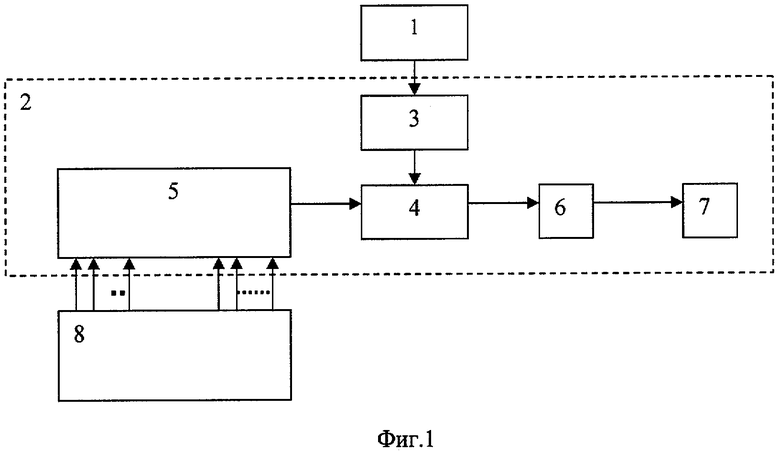
| Устройство для измерения расстояния,пройденного автомобилем | 1984 |
|
SU1303827A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО АВТОМОБИЛЕМ | 1993 |
|
RU2037779C1 |
| ВЕТРЯНЫЙ ДВИГАТЕЛЬ | 1930 |
|
SU20577A1 |
| Полевой В.А | |||
| Работа с трехкоординатным топопривязчиком | |||
| - М.: Недра, 1978, с.23-24 | |||
| Устройство для измерения расстояний | 1981 |
|
SU977956A2 |

