Область техники, к которой относится изобретение
Настоящее изобретение относится к вопросу улучшения позиционирования роботом рабочего инструмента и сенсорных датчиков в пределах его рабочей среды и в особенности касается усовершенствования механических и программных средств для позиционирования рабочего инструмента или сенсора.
Уровень техники
Традиционно техническое обслуживание механического оборудования, такого как двигатели и машины, содержащих корпус, выполняется согласно регламентам регулярного технического обслуживания. В случае неполадок оператор или инженер проводят испытание машины или двигателя на выполнение ряда контрольных функций в соответствии с программой поиска и устранения неисправностей и отмечают реакцию машины или двигателя на каждую контрольную функцию. Наблюдая за выполнением заданной контрольной функции или реакцией машины на нее, можно диагностировать, по крайней мере, частично тот участок, где произошло нарушение нормальной работы. После этого машину разбирают в той степени, какая достаточна для определения возможной неисправности и выполнения ремонта.
В параллельной патентной заявке Великобритании 0020461.0, принадлежащей заявителю настоящего изобретения, содержание которой включено в данное описание посредством ссылки на нее, описан и заявлен аппарат, содержащий рабочую головку, приспособленную для переноса инструмента или анализирующего элемента с целью выполнения в некоторой зоне машины внутренних работ или внутреннего осмотра. Данный аппарат содержит несущую руку для рабочей головки, которая приспособлена для введения внутрь машины с целью установки рабочей головки в требуемое рабочее положение, средства для управления работой указанной рабочей головки и средства для управления пространственным положением и позиционированием руки внутри машины. При этом несущая рука содержит, по меньшей мере, один сегмент, состоящий из множества звеньев, где каждое звено шарнирно соединено с соседним звеном, а также средства управления позиционированием и/или пространственным положением указанного сегмента относительно некоторой точки отсчета. Благодаря этому рука имеет возможность, приспосабливаясь, следовать по заданной траектории внутри машины от места ввода в корпус машины до операционной зоны.
Отдельным аспектом изобретения, описанного в указанной заявке, является то, что каждый сегмент содержит множество звеньев, причем между соседними звеньями существует некоторая степень шарнирной подвижности. Поддерживая связи шарнирных звеньев в каждом сегменте в напряженном состоянии, можно точно управлять пространственным положением каждого сегмента, давая руке возможность следовать криволинейной траектории и при этом направлять рабочий инструмент в машине. Руку такого типа иногда называют змеевидной рукой из-за ее способности подобно змее вытягиваться вдоль собственной оси и обходить препятствия по криволинейной траектории.
Изобретение, описанное в указанной патентной заявке №0020461.0, требует точной технологии изготовления каждого элемента, чтобы минимизировать потери на трение в точке шарнирной связи между звеньями каждой пары. В многозвенном сегменте эти потери на трение накапливаются, и в руке робота, состоящей из нескольких сегментов, суммарные потери на трение, которые приходится преодолевать в процессе манипулирования рукой, могут быть значительными. Поэтому существует потребность в устройстве, компоненты которого могли бы производиться по относительно простой технологии и потери на трение в котором могли быть уменьшены. В устройстве, описанном в патентной заявке №0020461.0, компенсация сил натяжения, создаваемых тросами управления и вызывающих поджатие звеньев, обеспечивается пружинными средствами.
Авторами настоящего изобретения было обнаружено, что, если отказаться от пружин и установить вместо них слой резины или эластомерного материала, приклеив его к двум соседним элементам, составляющим шарнирную пару сегмента, или связав его с ними посредством выступов и впадин, то резина может образовать между элементами шарнира контактную поверхность с фиксированным трением и в то же самое время обеспечить способность к упругому смещению в направлении, соответствующем сдвигу, которое необходимо для создания «жесткости» шарнирного соединения.
Раскрытие изобретения
В связи с изложенным одним из аспектов настоящего изобретения является создание руки робота (в частности, змеевидной руки), которая содержит:
первый и второй элементы шарнира, каждый из которых может совершать ограниченное перемещение относительно другого,
упругие эластомерные средства, которые помещены между первым и вторым элементами и приклеены к ним либо связаны с ними посредством выступов и впадин;
при этом перемещение между первым и вторым элементами приводит к сдвиговому смещению внутри эластомерных средств, помещенных между ними.
Эластомер может представлять собой натуральный каучук, или синтетическую резину, или любой другой подходящий эластичный или эластомерный материал. Эластомер желательно располагать в виде слоя между указанными первым и вторым элементами шарнира. Согласно одному варианту осуществления настоящего изобретения первому и второму элементам может быть придана форма взаимодействующих друг с другом, сопряженных деталей, а эластомерные средства могут быть помещены между ними в виде тонкого слоя. Благодаря такому выполнению взаимное перемещение элементов в направлении, соответствующем изгибу руки робота, создает сдвиговое смещение внутри эластомерных средств и до минимума уменьшает какое-либо смещение в направлении, соответствующем сжатию, возникающее в результате относительного перемещения первого и второго элементов. Эластомер может служить для создания осевой жесткости и эластичности при изгибе места соединения элементов.
Желательно, чтобы толщина слоя была как можно меньше. При этом было установлено, что оптимальная толщина слоев должна составлять не более 3 мм, в особенности 1 мм или менее. Слой может быть либо приклеен к одному или обоим элементам, либо может быть связан с одним или обоими элементами посредством выступов и впадин. Желательно, чтобы каждая поверхность, соприкасающаяся с элементом шарнира, была при работе закреплена так, чтобы относительное перемещение элементов вызывало внутри эластомера сдвиговое смещение. Снижение толщины слоя уменьшает тенденцию возникновения смещения в направлении, соответствующем сжатию, и поэтому обеспечивает более высокую стабильность позиционирования компонента, а также увеличивает осевую жесткость при повороте каждого звена шарнира сегмента.
Эластомерные средства могут содержать несколько слоев эластомера и тогда каждый слой эластомера может быть отделен от соседнего посредством жесткого слоя, приклеенного к смежным слоям или связанного с ними посредством выступов и впадин.
Эластомерные средства могут представлять собой слоистый материал (ламинат), а прослойка или промежуточные жесткие слои между слоями эластомера могут представлять собой жесткие слои любого типа из любого материала, который может быть приклеен к эластомеру или связан с ним посредством выступов и впадин. Промежуточный слой должен быть достаточно жестким, чтобы свести к минимуму движение эластомера в направлении, соответствующем сжатию. Типичным материалом для промежуточного слоя может служить тонколистовой металл, стеклопластик, слой углепластика или кевлара тканой и нетканой формы.
При этом рука робота может состоять, по меньшей мере, из одного сегмента, содержащего множество звеньев описанного типа, и средства для управления движением указанных звеньев в пределах сегмента, причем средства управления поддерживают указанные звенья в состоянии растяжения или сжатия. Средства управления могут представлять собой, по меньшей мере, один трос, проходящий от одного конца сегмента к другому.
В предпочтительном варианте осуществления настоящего изобретения средства управления могут содержать три троса, каждый из которых проходит от одного конца сегмента к другому, при этом изменение натяжения тросов друг относительно друга заставляет звенья изгибаться или дает им возможность изгиба, благодаря чему осуществляется управление движением сегмента. Для поддержания звеньев в поджатом состоянии желательно, чтобы тросы находились под натяжением. Разность натяжения тросов друг относительно друга заставляет сегмент перемещаться, или изгибаться, или позволяет ему совершать такие движения.
В конкретном варианте осуществления изобретения каждое звено шарнира может быть составлено из трех элементов:
наружного диска, желательно с отверстиями под тросы управления для того, чтобы тросы управления проходили с внешней стороны от других элементов шарнира,
внутреннего диска, который должен располагаться, по существу, внутри наружного диска и который имеет центральное отверстие для размещения средств управления и/или питания рабочей головки,
диска или слоя из эластомера, который заполняет промежуток между каждым внутренним и наружным дисками и который приклеен к каждому диску, или присоединен посредством выступов и впадин, или же свободно установлен между внутренним и наружным дисками, так что на внутренний диск не наложены ограничивающие связи непосредственно со стороны остальных элементов.
В соответствии с изобретением рука робота может содержать несколько сегментов, при этом каждый сегмент оснащается средствами управления. По меньшей мере, один из элементов каждого звена шарнира может быть оснащен средствами для проводки тросов от одного конца сегмента к другому.
Тросы могут быть расположены на внешней стороне звеньев шарниров сегмента. Каждый трос может завершаться наконечником, который должен садиться в соответствующий вырез (обнизку) концевой крышки сегмента так, чтобы при натяжении тросов наконечник приводился в контакт с концевой крышкой для передачи сжимающей нагрузки на каждый из сегментов с целью поддержания жесткости звеньев шарниров в сегменте.
Каждый трос управления может приводиться в действие приводным механизмом, причем, когда имеются тросы управления для нескольких сегментов, приводные механизмы располагают вдоль одной или нескольких дуг на панели приводов или на выступе, примыкающем к одному концу первого сегмента. Обычно в наборе приводных механизмов для каждого троса выделяется один приводной механизм, причем приводные механизмы набора могут быть расположены дугообразно, очерчивая в пространстве усеченный конус. Трос от каждого приводного механизма может быть проведен вокруг направляющего устройства, такого как шкив, чтобы обеспечить ввод троса управления параллельно оси входного отверстия.
В альтернативном варианте осуществления настоящего изобретения, по меньшей мере, некоторые из приводных механизмов могут быть расположены в пределах сегмента, и в этом случае будут необходимы средства для приведения этих приводных механизмов в действие. Такие средства могут включать в себя кабели связи для передачи данных или средства беспроводной передачи данных таких типов, какие хорошо известны в этой области техники. В последнем случае будет необходимо учитывать свойства среды, в которой будет происходить использование приводных механизмов, чтобы определить оптимальные средства управления.
Сегмент может быть собран последовательно, из ряда шарнирных звеньев, либо сегмент может быть собран целиком в некотором шаблоне, при этом эластомер инжектируют в промежутки между элементами, как в пресс-форму. Таким способом относительно просто и быстро можно получать целиком склеенные, законченные сегменты.
В альтернативном варианте осуществления настоящего изобретения каждое звено шарнира может быть получено из пары полузвеньев, которые могут быть собраны вместе торцом к торцу. При таком способе половина внутреннего элемента звена (внутреннее полузвено) и половина наружного элемента звена (наружное полузвено) могут быть собраны вместе со связывающим их слоем резины. Полузвенья могут быть собраны затем задними или передними торцами вместе, чтобы образовался единичный шарнирный элемент, множество которых образует сегмент.
При разработке настоящего изобретения было установлено, что каждое полузвено шарнира может быть выполнено из трех отдельных, индивидуальных элементов, а именно: из наружного элемента (наружного полузвена), внутреннего элемента (внутреннего полузвена) и резинового вкладыша. Все, что требуется в этом случае, - это обеспечить связь вкладыша с каждым из элементов посредством выступов и впадин таким образом, чтобы при попытке переместить один элемент относительно другого в резиновом вкладыше создавалось сдвиговое смещение или усилие. Затем различные элементы, уже связанные между собой в полузвенья, могут быть скреплены вместе посредством установочных штифтов, устанавливаемых в соответствующие отверстия, предусмотренные в каждом из элементов. Шарнирный узел руки робота может изготавливаться «россыпью», при этом через множество рабочих отверстий в периферической части наружных элементов могут быть пропущены тросы, связанные с приводным механизмом или с панелью приводов. В другом варианте элементы могут быть неразъемным образом связаны друг с другом, например, путем склеивания. Когда приводные механизмы отвечают на сигнал управления, чтобы создать в панели приводов какую-то степень натяжения, весь шарнирный узел удерживается в стянутом состоянии, так что, варьируя натяжение тросов, можно заставить сегмент соответствующим образом изгибаться.
Первый и второй элементы, являющиеся составной частью каждого звена или полузвена, могут определять форму своего промежуточного резинового компонента (вкладыша): либо сферическую, либо коническую, либо некую среднюю между сферической и конической, либо даже тороидальную. Если этот компонент имеет сферическую форму, то при повороте внутреннего диска относительно наружного деформация сферического компонента является целиком сдвиговой. Если конструкцию компонента изменить так, что он перестанет быть сферическим, то любой поворот одной части относительно другой наряду со сдвиговой деформацией компонента будет вызывать объемную деформацию эластомера, приводящую к формированию местного растяжения и сжатия, параллельного оси шарнира. Это делает любые несферические шарниры более жесткими по сравнению с эквивалентным по размерам сферическим шарниром.
Как указывалось выше, большое преимущество дает замена резиновой детали в каждом звене на многослойный материал с целью введения еще двух, более тонких слоев металла. Это позволяет расширять диапазон движения такого звена более эффективно, чем если просто удваивать число звеньев в сегменте. Длина, добавляемая к звену для двукратного увеличения угла изгиба, меньше, чем удвоенный первоначальный шаг звеньев. Эту идею можно распространять в разумных пределах. Тонкий жесткий вкладыш между двух слоев резины накладывает на резиновые детали (слои) такие связи, что эти две резиновые детали обеспечивают почти такую же жесткость на сдвиг, что и одна резиновая деталь двойной толщины. Однако две резиновые детали меньшей толщины проявляют большую жесткость на сжатие, нежели одна деталь двойной толщины.
В данном варианте осуществления изобретения, если два соседних звена изгибаются так, что их наружные, периферические части сводятся вместе, то диаметрально противоположные точки расходятся, определяя таким образом кольцевой сегмент. При таких условиях внутренние диски свободно движутся относительно наружных дисков. Задача такой конструкции - поддерживать центр вращения элементов неизменным в той точке, где находится центр сферической поверхности внутреннего диска, когда звено находится в недеформированном состоянии. По существу, звено работает подобно сферическому шарниру без трения, за исключением гистерезисных потерь внутри резины и небольшого осевого сжатия, необходимого для поддержания жесткости звена.
За счет использования между каждой парой подвижных деталей в каждом звене дисков из эластомера достигается значительное снижение трения. В то же самое время устройство становится исключительно простым, т.е. пригодным для его производства большими партиями. После того как изготовлены оснастка и форма, воспроизведение изделия в больших количествах становится сравнительно простым. Можно выпускать сегменты, выполненные из значительного числа звеньев, при этом оптимальное управление для каждого сегмента реализуется посредством трех тросов. Хотя, вероятно, и можно в сегменте отказаться от одного из тросов или, по меньшей мере, от одного из рабочих тросов, желательно использовать, по меньшей мере, три троса управления, чтобы манипулировать сегментом оптимальным образом. В случае многосегментной руки для каждого сегмента потребуется набор из трех тросов управления. Таким образом, для руки с восемью сегментами всего потребуется 24 управляющих троса, каждый из которых должен управляться от отдельного приводного механизма.
В соответствии с еще одним аспектом настоящего изобретения вокруг каждого сегмента может быть предусмотрен наружный рукав. В конкретном варианте осуществления изобретения этот рукав может иметь вид гофрированной оболочки. Использование такой оболочки имеет ряд преимуществ, состоящих в том, что она увеличивает жесткость звеньев на скручивание/изгиб. Это особенно выгодно, так как, используя соответствующую конструкцию гофрированной оболочки, можно увеличить жесткость руки на скручивание при очень малом увеличении жесткости на изгиб.
Дополнительными преимуществами такой оболочки является защита тросов и других компонентов от внешних факторов, способных вызвать повреждение, а также то, что оболочка позволяет целиком заполнить сегмент смазкой. Типичным смазочным материалом может служить сухой порошок или жидкость, например консистентная смазка, и/или масло. Физические характеристики смазочного материала, включаемого в состав руки, можно выбирать в соответствии с той средой, в которой руке предстоит работать. Одной из особенностей данного варианта осуществления изобретения является то, что, когда рука изгибается, геометрическая форма промежутков между соседними звеньями изменяется, приводя к вытеснению или «перекачке» смазки из одной области сегмента в другую. Это обеспечивает бесперебойное смазывание компонентов благодаря циркуляции смазочного материала в пределах каждого сегмента. Другим аспектом изобретения является то, что руку можно снабдить резервуаром смазочного материала, а смазочный материал можно непрерывно прокачивать через руку и возвращать в резервуар. Такой вариант осуществления особенно полезен тогда, когда рука должна использоваться в агрессивной окружающей среде и когда требуется охлаждение руки. В таком случае в состав резервуара смазочного материала могут быть включены средства охлаждения.
При использовании механизма, соответствующего настоящему изобретению, можно задавать траектории, дистанционно управляя рабочим концом руки от джойстика, или, как вариант, может быть предусмотрено компьютерное управление в онлайновом режиме или в автономном режиме по CAD-модели заданной рабочей среды.
Последующее описание приводится со ссылками на прилагаемые чертежи, на которых представлены варианты осуществления устройства, соответствующего настоящему изобретению.
Краткое описание чертежей
Фиг.1 представляет собой перспективное изображение нескольких звеньев в сегменте, соответствующем настоящему изобретению.
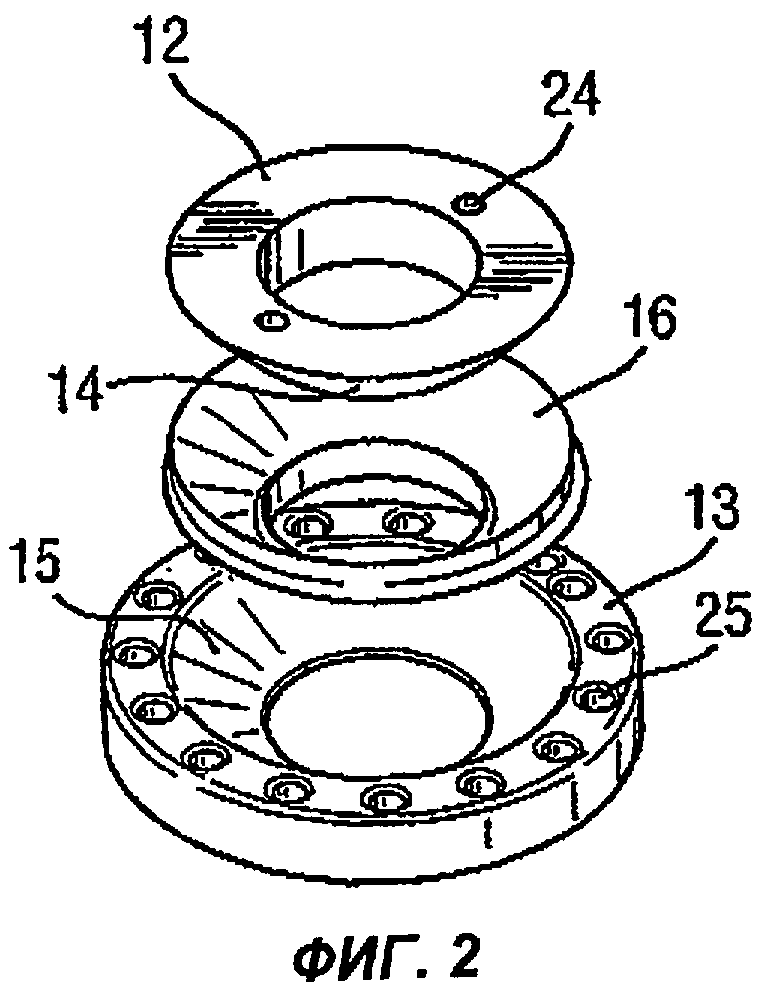
Фиг.2 представляет собой изображение «полузвена», показанного на фиг.1, в разобранном виде.
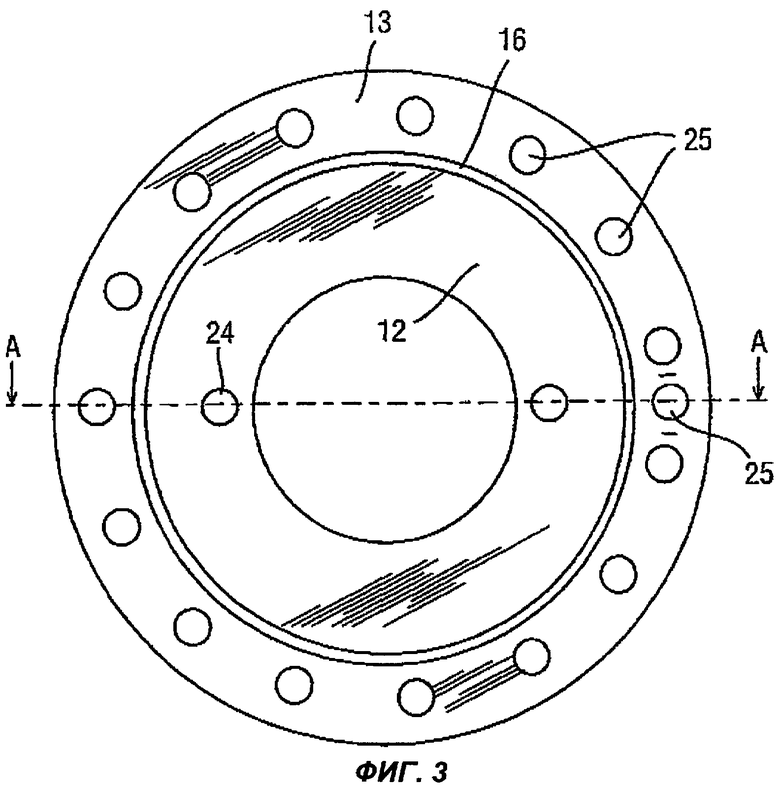
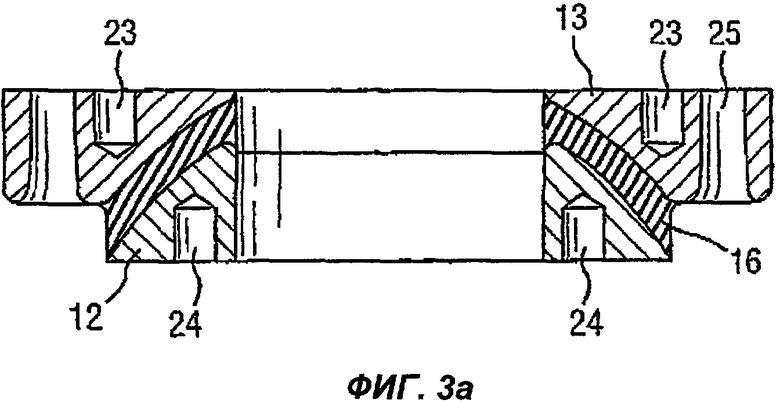
На фиг.3 приведен вид торца элемента звена или элемента полузвена, изображенного на фиг.1 и 2; а на фиг.3а показано сечение по линии А-А на фиг.3.
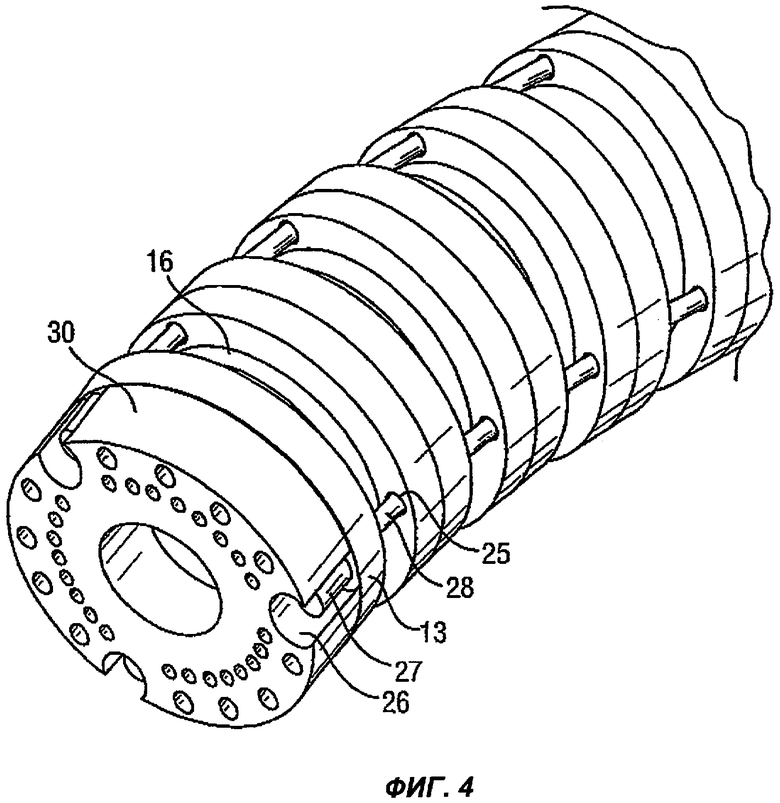
Фиг.4 представляет собой перспективное изображение концевой крышки, на которой показано крепление наконечника на дальнем конце сегмента.
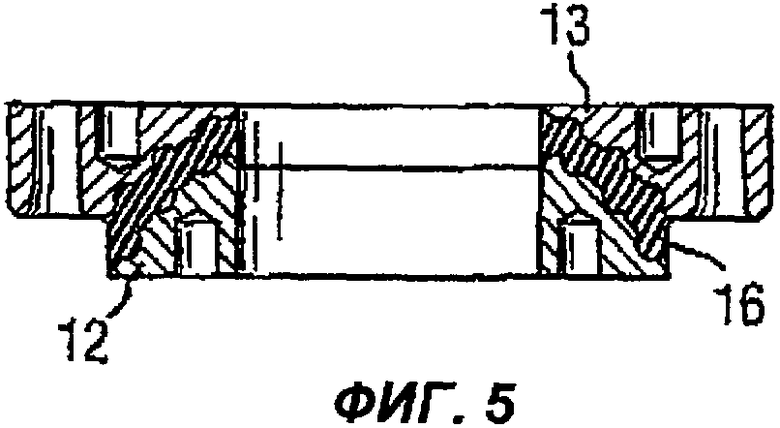
На фиг.5 показано поперечное сечение по линии А-А на фиг.6.
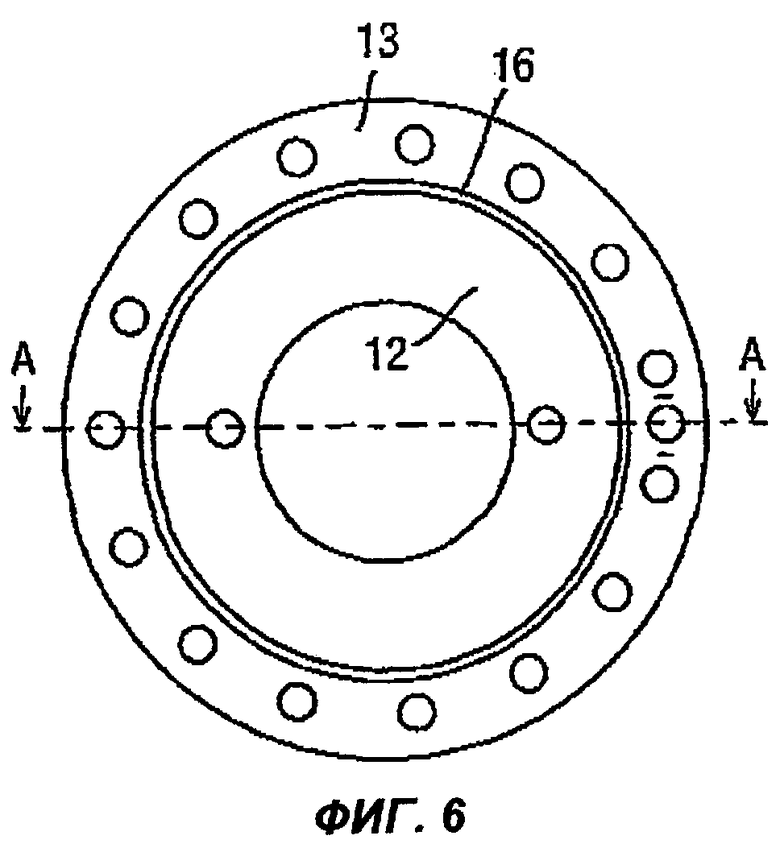
На фиг.6 приведен вид торца для альтернативного варианта осуществления настоящего изобретения.
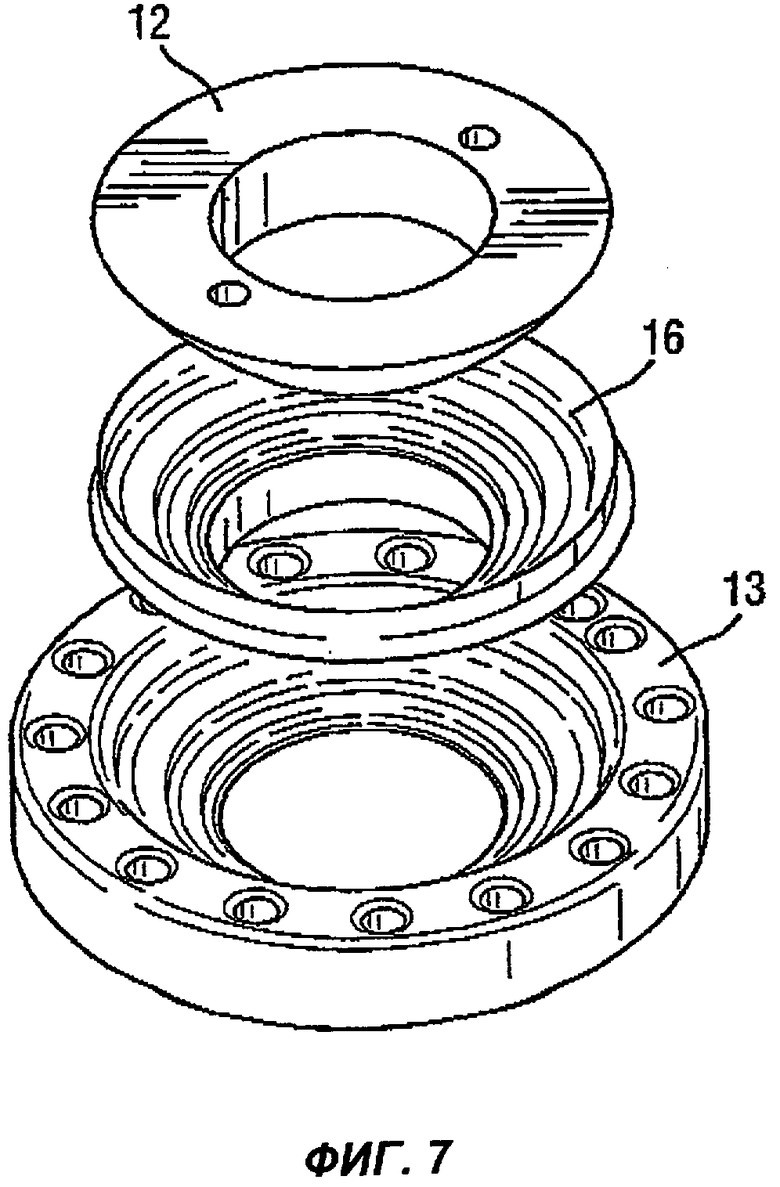
Фиг.7 представляет собой изображение «полузвена», соответствующего фиг.5 и 6, в разобранном виде.
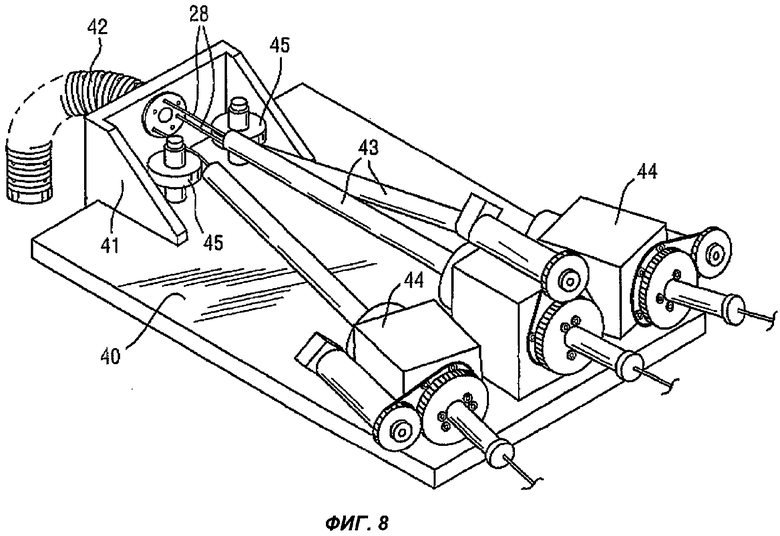
Фиг.8 изображает панель приводов в конфигурации с тремя приводными механизмами для одного сегмента.
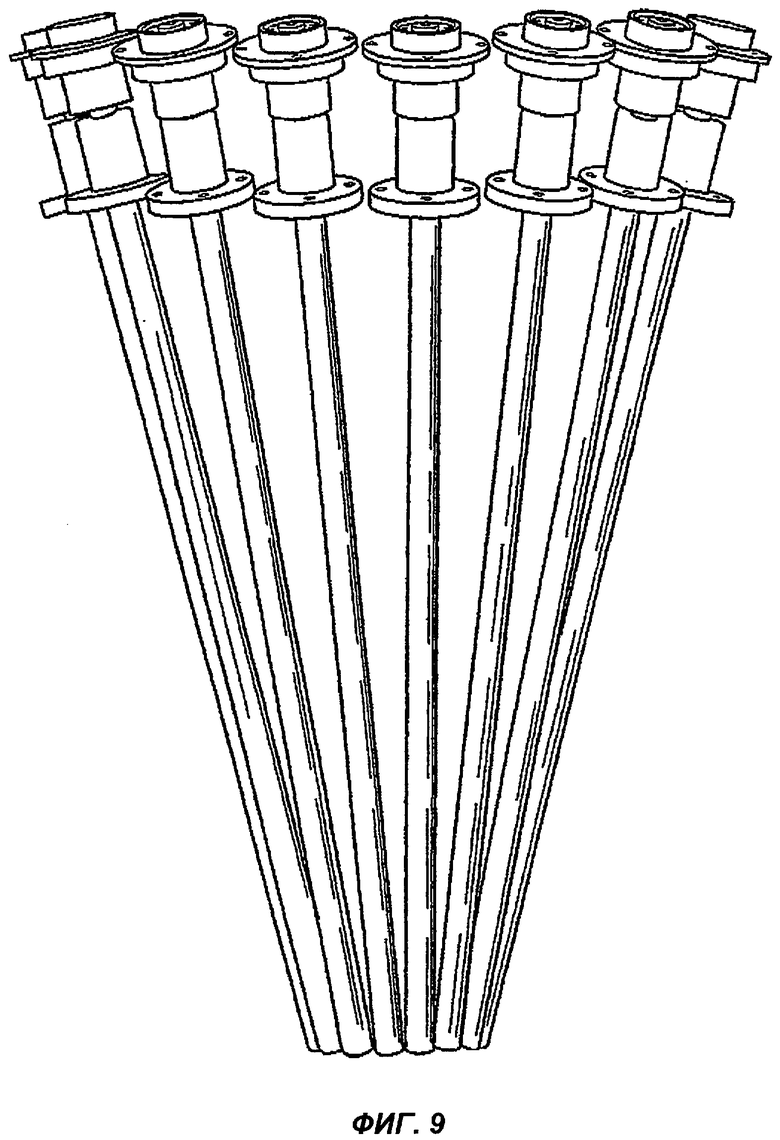
На фиг.9 показана конфигурация в виде усеченного конуса для нескольких приводных механизмов, управляющих тросами руки робота, содержащей несколько сегментов.
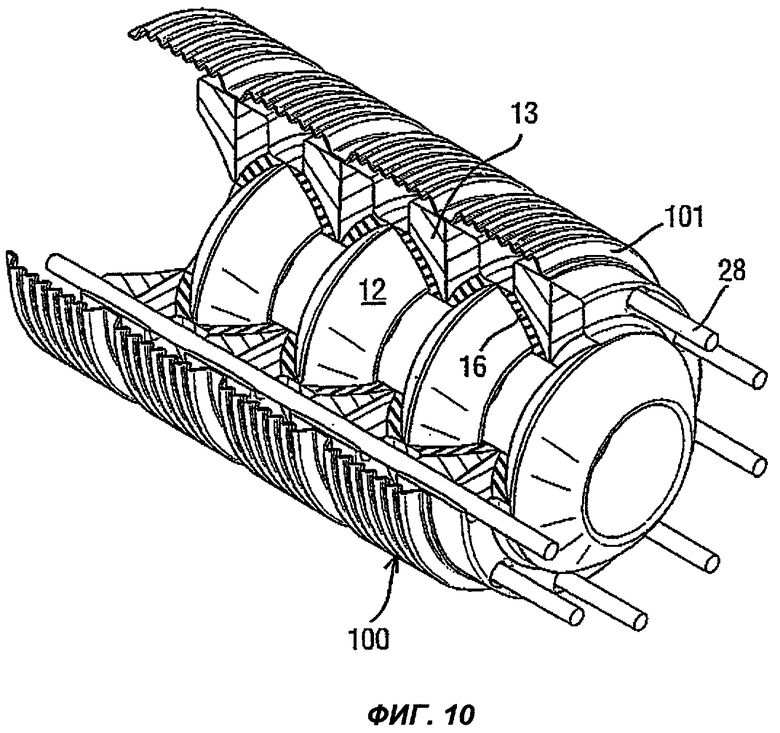
Фиг.10 представляет собой перспективную проекцию сегмента в оболочке для руки в соответствии с настоящим изобретением.
Осуществление изобретения
В соответствии с настоящим изобретением рука робота содержит несколько сегментов, в целом обозначенных как 10, которые собраны торцом к торцу, с целью получения змеевидной руки удлиненной формы. Каждый сегмент содержит несколько звеньев, обозначенных как 11. Каждое звено содержит внутренний диск 12 и наружный диск 13, который является направляющим элементом тросов. По форме внутренний диск 12 выполнен с кольцевой поверхностью дугообразного профиля, в целом обозначенной как 14, а наружный диск 13 имеет ответную поверхность 15 дугообразного профиля.
Как показано на фиг.1, внутренний диск 12 и наружный диск 13 собраны так, что отделены друг от друга слоем 16 резины, который может быть сформирован на месте сборки. Слой 16 резины приклеен к каждому наружному диску 13 и внутреннему диску 12 и дает дискам возможность перемещаться друг относительно друга. Каждый внутренний диск снабжен центральным отверстием 17, которое определяет центральный просвет, проходящий вдоль оси всего устройства и предназначенный для размещения источника питания и механизма управления рабочей головкой на конце руки. Каждое звено 11 может быть получено из пары «полузвеньев», которые лучше всего видны на фиг.2. Каждое полузвено содержит наружный элемент 13 полузвена, внутренний элемент 12 полузвена и резиновый диск 16, или вкладыш, который приспособлен для установки между указанными двумя элементами. Элементы могут быть склеены вместе, чтобы получилось полузвено, которое затем можно соединять с соседними элементами, формируя непрерывный сегмент, состоящий из звеньев. Следует отметить, что поверхность 15 дугообразного профиля наружного элемента 13 полузвена приспособлена для совместной работы с соответствующей нижней поверхностью (как показано на фиг.2) элемента 12. Диску 16 придана такая форма, чтобы он мог разместиться между указанными двумя элементами и мог быть склеен вместе с ними. Это лучше всего видно из фиг.3а, на которой склеенные элементы показаны в сечении.
Согласно одному из аспектов настоящего изобретения, наружный диск (т.е. направляющий элемент тросов) 13 снабжен несколькими отверстиями 23 под штифт, лежащими на одной окружности, причем внутренний диск 12 также снабжен соответствующими диаметрально расположенными отверстиями 24 под штифт. Специалистам в данной области понятно, что когда узлы будут собраны вместе посредством штифтов, располагаемых, соответственно, в отверстиях 23 и 24, а затем стянуты тросами управления, то им не обязательно быть скрепленными жестким, неразборным способом. Наружный диск 13 снабжен множеством сквозных отверстий 25, образующих направляющие отверстия для тросов, в которых могут разместиться тросы управления устройством.
Каждый сегмент может быть оснащен концевой крышкой 30 (см. фиг.4), на периферии которой предусмотрены отверстия под тросы и вырез 26 увеличенного диаметра (обнизка), который принимает втулку 27, присоединенную к концу троса 28 управления. При сборке устройства концевую крышку 30 крепят к соседнему диску 13 конечного звена, а тросы 28 управления проводят через соответствующие обнизки (вырезы) 26 в концевой крышке 30, а затем через соответствующие отверстия 25 в каждом наружном диске 13 каждого звена сегмента.
Несколько сегментов соединяют затем торцом к торцу, чтобы получить руку соответствующей длины для достижения задуманной цели. Такой «змеевидной» рукой можно манипулировать: она может пластично двигаться в осевом направлении вдоль своей длины и, подобно змее, следовать вдоль криволинейной траектории.
Концы тросов пропускают назад к приводным механизмам и натягивают тросы так, чтобы втулка 27 прижалась к торцевой крышке и весь узел находился в напряженном состоянии. Если узел, т.е. совокупность шарнирных элементов, приводить в напряженное состояние таким способом, то можно избежать склеивания элементов, а вместо этого, как показано на фиг.5, б, 7, на сопрягающихся торцах внутреннего и наружного дисков сделать канавки, в которые садится ответный профиль резинового диска 16. Эти канавки (профилирование) служат для фиксации диска 16 в некотором положении между внутренним и наружным дисками 12 и 13, а, кроме того, позволяют одному из дисков 12, 13 смещаться относительно другого в ответ на изменение натяжения тросов 28 управления. Это избавляет от необходимости склеивания дисков и позволяет относительно просто производить замену поврежденных элементов внутри любого данного сегмента.
В собранном сегменте наружные поверхности дисков и тросы управления можно герметически закрыть, а образовавшуюся полость и направляющие тросов заполнить каким-либо смазочным материалом, чтобы тросы управления работали в смазке. Это также способствует снижению потерь на трение в процессе работы.
Путем изменения натяжения каждого из тросов можно осуществлять управление работой каждого сегмента. На фиг.8 в упрощенном виде показана панель приводов с тремя приводами, которая содержит основание 40. На одной его стороне предусмотрен узел 41 вертикальной монтажной панели, к которой может крепиться концевой диск сегмента 42. Тросы 28 управления проходят через узел 41 вертикальной монтажной панели к направляющим трубкам 43 каждого из приводных механизмов 44. К среднему приводному механизму 44 трос 28 подходит от сегмента, по существу, напрямую, в то время как тросы каждого из боковых приводных механизмов для уменьшения трения или износа проведены через шкивы 45.
Управлять каждым из приводных механизмов 44 с изменением натяжения трех тросов 28 можно либо вручную, либо от компьютера. В зависимости от сочетания величин натяжения отдельные звенья в ответ на изменение натяжения тросов будут стремиться двигаться, тем самым создавая движение сегмента, что позволяет приводить конец сегмента в заданную точку рабочего пространства.
Если змеевидная рука робота содержит несколько сегментов, то для них потребуется гораздо больше приводных механизмов, обычно по три механизма на один сегмент. В таком случае необходимо так выстроить приводные механизмы, чтобы обеспечить доступ к тросам управления в месте их выхода из торца первого сегмента в относительно узком пространстве. В соответствии с этим приводные механизмы можно расположить на дуге так, чтобы тросы управления или трубки, через которые они подходят к каждому приводному механизму, образовали конус, подобный показанному на фиг.9.
Резиновые диски 16 могут представлять собой единый кусок резины или могут быть выполнены в виде композитного эластомера с жестким слоем. При этом было обнаружено, что чем тоньше индивидуальные слои резины, тем более эффективно работает суммарный слой и тем жестче становится соединение между внутренним диском и соответствующим наружным диском.
В руке робота, соответствующей настоящему изобретению, обеспечивается также герметичная изоляция несущих поверхностей между внутренним и наружным дисками, предупреждающая попадание в механизм вредных веществ из атмосферы (см. фиг.10). Кроме того, центральное отверстие (просвет) 17 надежно загерметизировано и обеспечивает легкий доступ к источнику питания и к средствам управления рабочей головкой, находящейся на конце руки робота.
Герметичная изоляция может быть выполнена в виде рукава 100, который снабжен кольцевым гофрированием 101. Рукав 100 проходит снаружи относительно внешней поверхности каждого наружного диска 13. Рукав 100, герметично закрывающий промежутки между наружными дисками 13, заполнен маслом или иным смазочным материалом, давая тем самым возможность тросам управления работать в смазке. Подходящими смазочными материалами являются масла, порошки и консистентные смазки. Их вязкость и прочие физические характеристики должны выбираться с учетом окружающей среды, в которой будет эксплуатироваться рука.
Использование рукава 100 гофрированной конструкции дает эффект увеличения жесткости при взаимном скручивании и/или изгибе соседних звеньев. Это способствует увеличению жесткости руки робота в отношении скручивания при весьма незначительном увеличении жесткости на изгиб. Описанная конструкция служит также для защиты тросов и других элементов от внешних вредных факторов.
Герметичное удержание смазочного материала внутри рукава 100 создает важное преимущество в работе устройства. Как было описано, когда сегмент совершает изгиб, соседние периферические участки наружных дисков 13 для тросов сближаются, в то время как диаметрально противоположные участки тех же дисков 13 расходятся. В результате полость, содержащая смазку, изменяет свою форму от тороидальной с постоянным, по существу, одинаковым поперечным сечением до «клинообразной» формы. Это приводит к вытеснению смазки с «узкой» стороны клина и к ее перекачке на «широкую» сторону клина, т.е. к наружной стороне кривой. В процессе этого смазка обтекает множество тросов. Следовательно, всякий раз, когда сегмент совершает изгиб или изменяется плоскость отклонения, за счет этого эффекта перекачки производится принудительное смазывание внутренних элементов руки и, в частности, каждого троса.
Желательно, чтобы смазочный материал можно было вводить в руку несколькими различными способами. Согласно одному из вариантов осуществления настоящего изобретения полости можно заполнять смазочным материалом при сборке и надежно герметизировать с расчетом на весь срок службы устройства. В альтернативном варианте осуществления индивидуальные звенья или сегменты руки можно изолировать, а смазку вводить через специальные места, например смазочные штуцеры. При этом избыток смазки можно выпускать через дополнительное отверстие или стравливающий клапан. В другом варианте осуществления изобретения всю руку можно смазывать как единое целое, используя тросовые отверстия наружных звеньев для пропускания смазочного материала вдоль всей длины руки. Жидкую смазку можно непрерывно прокачивать через руку и возвращать обратно в центральный резервуар. Такая конструкция позволяет осуществлять управление температурой смазочного материала в руке, подогревая или охлаждая смазку. Таким образом, настоящее изобретение включает в себя возможность установки средств управления температурой жидкого смазочного материала внутри руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКАЯ ЗАТРАВКА | 2004 |
|
RU2258576C1 |
| Соединительное звено цепи | 1977 |
|
SU763214A1 |
| СОЕДИНИТЕЛЬНОЕ ЗВЕНО КРУГЛОЗВЕННОЙ ЦЕПИ | 1994 |
|
RU2078266C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ СТЫКОВЫМ СВАРИВАНИЕМ ТОЛСТЫХ ТЕРМОПЛАСТОВЫХ ЗАГОТОВОК НЕПОДВИЖНЫМ ПОЗИСТОРНЫМ СВАРНИКОМ | 2004 |
|
RU2258004C1 |
| СОЕДИНИТЕЛЬНОЕ ЗВЕНО КРУГЛОЗВЕННОЙ ЦЕПИ | 1990 |
|
RU1780374C |
| РЕЖУЩАЯ ГАРНИТУРА ЦЕПНОЙ ПИЛЫ И ПИЛЬНАЯ ЦЕПЬ | 2011 |
|
RU2562225C2 |
| РЕЖУЩАЯ ГАРНИТУРА ЦЕПНОЙ ПИЛЫ И ПИЛЬНАЯ ЦЕПЬ | 2011 |
|
RU2714194C2 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ШАРНИРЫ КАЧЕНИЯ С ШАРЖИРОВАННЫМИ ПОВЕРХНОСТЯМИ | 2009 |
|
RU2472050C2 |
| ПРЕДМЕТ МЕБЕЛИ С ВЫТАЛКИВАЮЩИМ УСТРОЙСТВОМ ДЛЯ ПОДВИЖНЫХ ДЕТАЛЕЙ МЕБЕЛИ | 2008 |
|
RU2500870C2 |
| СПОСОБ ГОРЯЧЕГО ДЕФОРМИРОВАНИЯ СТАЛЬНОГО ЛИСТА ПОДЛЕЖАЩЕЙ ИЗГОТОВЛЕНИЮ ЛОПАСТИ РОТОРА ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2012 |
|
RU2597488C2 |
Изобретение относится к усовершенствованию механических и программных средств для позиционирования рабочего инструмента или сенсора. Змеевидная рука робота содержит первый и второй элементы шарнира, каждый из которых может совершать ограниченное перемещение относительно другого элемента, и упругие эластомерные средства, которые расположены между указанными первым и вторым элементами в виде тонкого слоя посредством склеивания или посредством выступов и впадин. При этом относительное перемещение элементов в направлении, соответствующем изгибу руки робота, вызывает сдвиговое смещение внутри эластомерных средств и ослабляет любое смещение в направлении, соответствующем сжатию вследствие относительного смещения первого и второго элементов. 33 з.п. ф-лы, 10 ил.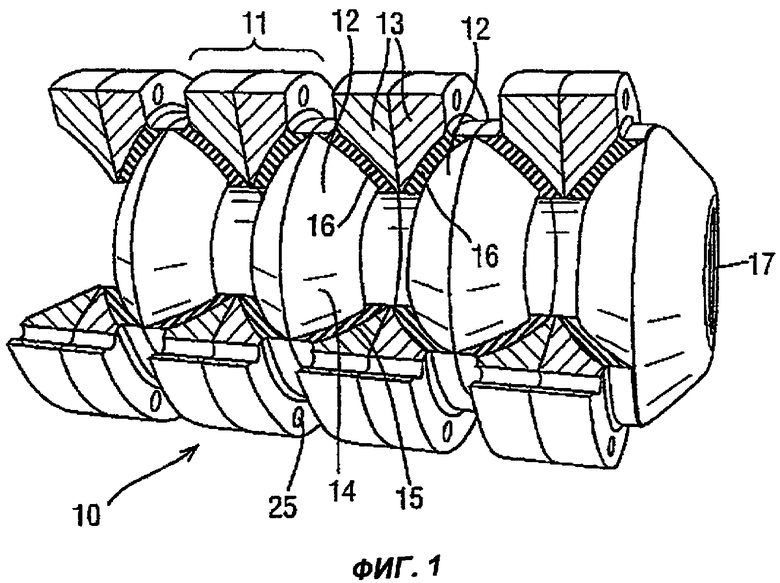
| US 4751821 А, 21.06.1988 | |||
| МАНИПУЛЯТОР | 0 |
|
SU344981A1 |
| Рука манипулятора | 1989 |
|
SU1673438A1 |
| Манипулятор | 1981 |
|
SU1077780A1 |
| US 4579558 A, 01.04.1986. | |||

