Изобретение относится к машиностроению и может .быть использовано для введения во внутренние полости устройств различных инструментов и манипулирования ими. Известен манипулятор, снабженный универсальными шарнирами, выполненными в виде двух фланцев, каждый из которых имеет радиальные и центральное отверстия, причем фланцы соединены гибкими тягами, свободно проходяшими через радиальные отверстия фланцев 1. Недостатком этого манипулятора являются узкие технологические возможности вследствие того, что воздействие на изгибаемый шарнир распространяется на все предшествуюшие ему шарниры, изгибая их. Это усложняет управление манипулятором. Цель изобретения - расширение технологических возможностей за счет кинематической развязки шарниров (устранение взаимовлияния шарниров). Указанная цель достигается тем, что в манипуляторе, снабженном универсальными шарнирами, выполненными в виде двух фланцев, каждый из которых имеет радиальные и центральное отверстия, причем фланцы соединены гибкими тягами, свобо дно проходящими через радиальные отверстия флан цев, тяги каждого последующего шарнира расположены в центральных отверстиях всех предыдуших шарниров. На черте 1 е схематично показан предлагаемый манипулятор, вид в аксонометрии. Манипулятор включает набор универсальных шарниров, каждый из которых содержит по два фланца 1 и не менее трех тяг 2. Все фланцы универсальных шарниров помещены в эластичную оболочку 3. Для прохождения тяг 2 охватываюшего шарнира через фланцы 1 охватываемого шарнира в них имеются радиальные отверстия 4. В центральной части каждого фланца выполнено отверстие 5. Манипулятор работает следующим образом. При производстве какой-нибудь манипуляции с участком управления фланцы 1 универсальных шарниров меняют свое взаимное положение. Вторые фланцы повторяют положение первых, т.е. рабочий участок воспроизводит пространственную форму участка управления. Обеспечение возможности воздействия непосредственно и только на управляемый шарнир манипулятора, дает возможность ему более глубоко проникнуть внутрь полости сложной конфигурации. При этом при работе манипулятора не требуется выработка сигналов коррекции изгибов, распространяюшихся на шарниры манипулятора, предшествующие управляемому.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1989 |
|
SU1832619A1 |
| Манипулятор | 1991 |
|
SU1757876A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Манипулятор | 1986 |
|
SU1404324A1 |
| Шарнир манипулятора | 1979 |
|
SU946922A1 |
| Манипулятор | 1985 |
|
SU1286405A1 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| МАНИПУЛЯТОР | 1972 |
|
SU344981A1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| Манипулятор | 1983 |
|
SU1115898A1 |
МАНИПУЛЯТОР, снабженный универсальными шарнирами, выполненны.ми в виде двух фланцев, каждый из которых имеет радиальные и центральное отверстия, причем фланцы соединены гибкими тягами, свободно проходящими через радиальные отверстия фланцев, отличающийся тем, что, с расширения технологических возможностей за счет кинематической развязки шарниров (устранения взаимовлияния шарниров), тяги каждого последуюш.его шарнира расположены в центральных отверстиях всех предыдущих шарниров. (Л о ч ч| 00 о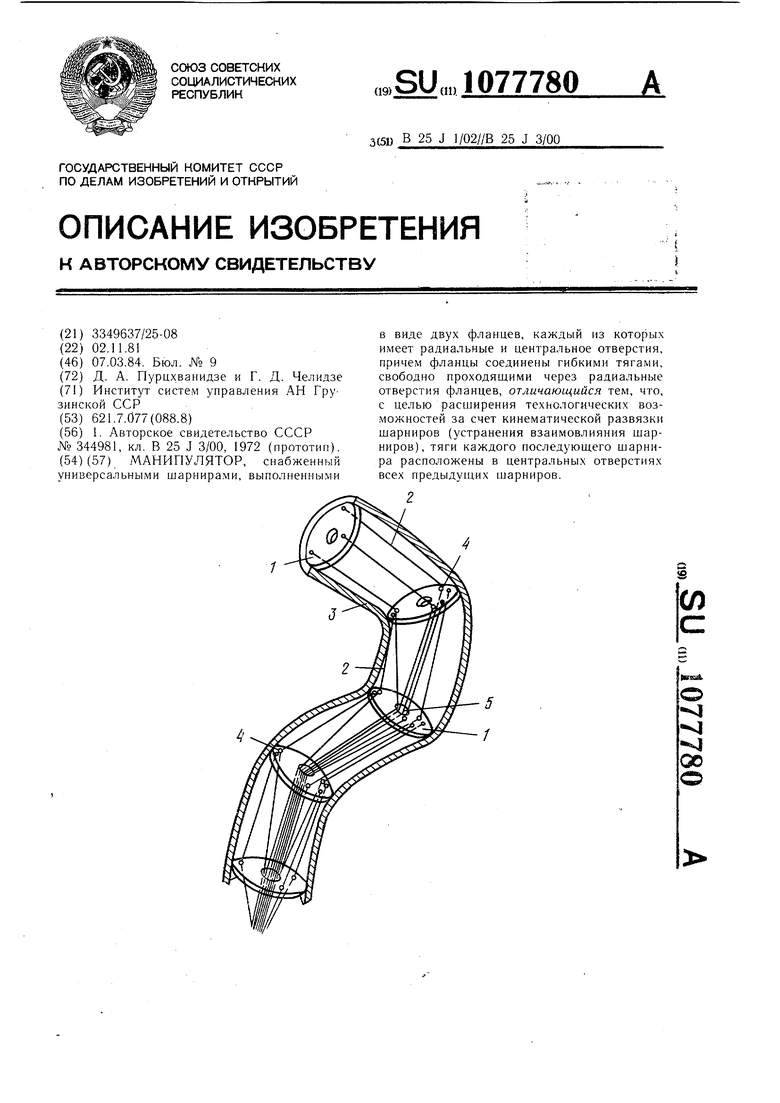
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МАНИПУЛЯТОР | 0 |
|
SU344981A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
