Изобретение относится к ядерной технике и может быть использовано при снаряжении оболочек тепловыделяющих элементов (ТВЭЛ) ядерным топливом в виде таблеток.
Известен способ снаряжения таблетками оболочек и устройство для его осуществления, установленное в автоматической линии изготовления ТВЭЛ, включающее столешницу с вибратором, имеющую горизонтальные ложементы формирования столбов топливных таблеток, сообщенные с одной стороны с открытыми концами оболочек, а с другой стороны - с вибропитателем поштучной подачи топливных таблеток на упомянутые ложементы, снабженные отсекателем-упором начала столба и отсекателем-прижимом конца столба топливных таблеток (см. RU 2070740 С1, 20.12.1996 /1/).
В процессе изготовления таблеток их высота может колебаться, что вызывает необходимость индивидуального контроля длины столба при снаряжении оболочек ТВЭЛ. При формировании длины столба топливных таблеток меньше заданной длины не вызывает трудности доснаряжение таблеток до заданной длины, а при превышении длины столба заданной длины возникают трудности с извлечением таблеток из снаряженной оболочки.
Известны способ и устройство для снаряжения оболочек таблетками (см. RU 2100857, 27.12.1997 /2/). Устройство содержит раму с закрепленным на ней виброприводом, выполненным в виде кулачкового механизма, толкатель которого взаимодействует через штангу с закрепленной на ней оболочкой ТВЭЛа, при этом штанга установлена с возможностью взаимодействия через шарнир с вибропитателем в виде чаши, установленной с возможностью поворота.
Недостатком устройства является наличие быстроизнашивающихся элементов конструкции, имеется возможность повреждения таблеток в чаше. Кроме того, большие габариты устройства вызваны необходимостью выкладывания полной длины всех столбов таблеток.
Соответствующий способ не предусматривает приемов по отмеру заданной длины столба.
Известен способ горизонтального снаряжения таблетками стержневых ТВЭЛов, включающий вибрационное формирование и снаряжение столба топливных таблеток в открытый конец оболочки ТВЭЛа, измерение длины столба в снаряженной оболочке, доснаряжение столба (см. RU 2156508, 20.09.2000 /3/). Согласно способу производят формирование неполного столба и измерение его длины в оболочке, после чего с помощью системы управления осуществляют формирование недостающей части столба до заданной длины с максимально возможной точностью, используя для этого предварительно сформированный банк данных по длине каждой таблетки. Данный способ принят в качестве прототипа предлагаемого способа.
В источнике /3/ раскрыто устройство для горизонтального снаряжения таблетками стержневых ТВЭЛов, принятое за прототип предлагаемого устройства, содержащее столешницу-бокс с вибратором с горизонтальными ложементами в виде направляющих, вибропитатель поштучной подачи топливных таблеток в каждом ложементе, узел контроля длины столба топливных таблеток с отсекателем-упором начала столба и отсекателем-прижимом конца столба, стыковочный узел, механизм замера столба таблеток в оболочке. Кроме того, устройство оснащено датчиками пути топливных таблеток.
Установка имеет высокий уровень автоматизации. Недостатком этой установки является сложность конструкции и наладки вибропривода, а подбор длин каждой отдельной таблетки в процессе доснаряжения приводит к усложнению установки и невысокой ее производительности.
Изобретение направлено на решение задачи повышения производительности установки при уменьшении погрешности отмера заданной длины топливного столба.
Поставленная задача решается тем, что в способе горизонтального снаряжения таблетками оболочек стержневых тепловыделяющих элементов (ТВЭЛ), включающем вибрационную подачу топливных таблеток в оболочку, формирование столба топливных таблеток, контроль его длины, доснаряжение оболочки недостающей частью топливных таблеток до заданной длины столба, согласно изобретению формирование столба таблеток осуществляют путем подачи предварительно сформированных неполных столбов топливных таблеток в зону отмера, осуществляют шаговое перемещение каждого неполного столба внутри этой зоны, на границах которой установлены датчики, с помощью каретки линейного привода и определяют длину каждого неполного столба путем подсчета количества импульсов, поданных на шаговый двигатель перемещения каретки линейного привода от момента срабатывания одного датчика в начале перемещения каретки линейного привода до момента срабатывания другого датчика при прохождении передним торцом неполного столба передней границы зоны отмера, при этом контроль длины столба топливных таблеток осуществляют по суммарной длине их неполных столбов.
Предпочтительно регулировать скорость перемещения каретки линейного привода таким образом, чтобы обеспечивались дискретизация топливных таблеток с помощью ленточного транспортера и их поштучное перемещение для снаряжения в оболочку.
Поставленная задача также решается тем, что устройство для горизонтального снаряжения таблетками оболочек стержневых ТВЭЛов, содержащее транспортный механизм подачи оболочек ТВЭЛов, вибропривод и стыковочный узел, а также устройство отмера длины неполного столба и подачи топливных таблеток в оболочку, согласно изобретению снабжено многоручьевым спутником-накопителем для размещения на нем неполных столбов топливных таблеток, устройство отмера длины столба и подачи топливных таблеток в оболочку включает линейный привод с кареткой и шаговым двигателем, соединенный со спутником-накопителем с возможностью его шаговой подачи и перемещения неполных столбов топливных таблеток в зону отмера длины столба и далее на ленточный транспортер, размещенный перед стыковочным узлом, который жестко связан со вторичной частью вибропривода для введения неполных столбов топливных таблеток в оболочку, устройство отмера длины столба и подачи топливных таблеток включает также датчики, установленные на границах зоны отмера с возможностью переключения одного из них при начале перемещения каретки линейного двигателя и другого - при пересечении границы зоны отмера торцом неполного столба для подсчета количества импульсов, поданных на шаговый двигатель перемещения каретки.
Кроме того, оно снабжено системой управления, соединенной с датчиками и с линейным приводом и выполненной возможностью вычисления длины неполного столба по сигналам с датчиков, суммирования вычисленных длин до получения столба заданной длины, а также с возможностью управления перемещением каретки линейного привода, при этом система управления выполнена на базе программируемого логического контроллера.
Кроме того, вибропривод выполнен на основе трехфазного синхронного линейного двигателя.
Использование в качестве вибропривода трехфазного синхронного линейного двигателя с прецизионным инкрементным линейным датчиком положения и адаптивным программным управлением от контроллера позволяет задать оптимальную функцию управления в качестве закона виброколебаний и обеспечить постоянство скорости снаряжения при изменении массы оболочки в процессе снаряжения.
Метод отмера заданной длины топливного столба с использованием линейного привода с шаговым двигателем и ленточного транспортера в качестве дискретора позволяет уменьшить погрешность отмера, так как требуемая длина определятся суммированием длин неполных столбов, подаваемых с ручьев палет в устройство отмера и далее в оболочку.
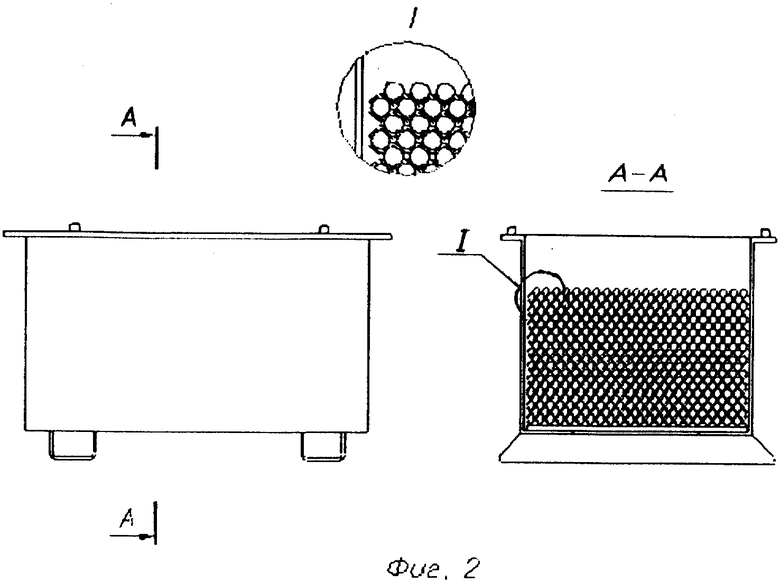
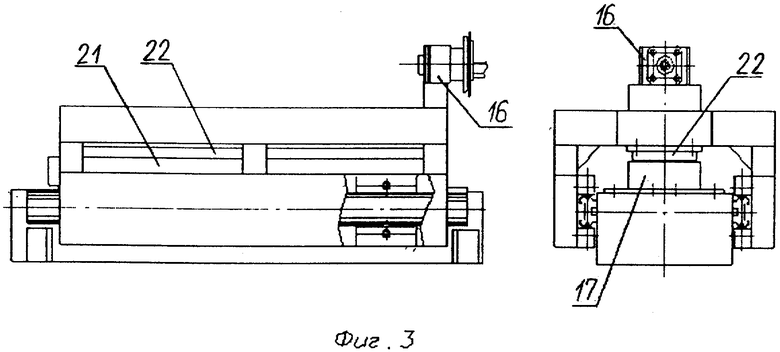
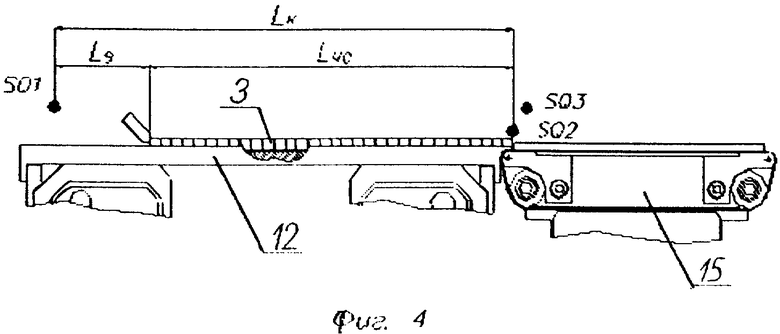
На фиг.1 изображена установка для снаряжения ТВЭЛов, вид спереди и сверху; на фиг.2 - показан контейнер с таблетками, уложенными на палетах; на фиг.3 - вибропривод, на фиг.4 - зона отмера длины столба.
Установка содержит:
- транспортную систему 1 подачи контейнера 2 с таблетками 3, уложенными на палетах 4, выполненных в виде гофрированных поддонов, и подачи аналогичного порожнего контейнера 5 в зону загрузки этих палет без таблеток;
- средство 6 выгрузки палет с таблетками из контейнера через отверстие в его днище и аналогичное средство 7 загрузки порожних палет в порожний контейнер 5;
- пневматические линейные приводы: 8 - перемещения таблеток с палеты на спутник 9 их визуального осмотра, 10 - перемещения пустой налеты, 11 - перемещения таблеток со спутника 9 на спутник-накопитель 12;
- средство отмера длины топливного столба, содержащее линейные приводы 13, 14 с шаговыми двигателями и ленточный транспортер 15. Привод 13, совместно с ленточным транспортером 15, обеспечивает отмер длины столба таблеток 3, уложенного на спутнике-накопителе 12, и подачу их в стыковочный узел 16, связанный жестко с виброприводом 17. Привод 14 обеспечивает пошаговую подачу и позиционирование спутника-накопителя 12;
- раму 18 с транспортными механизмами продольной 19 и поперечной 20 подачи оболочек;
- вибропривод 17, выполненный на основе линейного двигателя, первичная часть 21 которого закреплена неподвижно к основанию, а вторичная часть 22 связана со стыковочным узлом 16 с цанговым зажимом, обеспечивающим жесткую связь с оболочкой 23. Оболочка базируется на роликовых опорах 24.
- защитное укрытие 25;
- систему управления 26, предназначенную для автоматического управления исполнительными механизмами (ИМ), отображения оперативной информации на панели оператора и обеспечения различных режимов работы.
Система управления выполнена на базе программируемого логического контроллера. В состав контроллера входят: модуль питания, модуль центрального процессора (ЦП), модули ввода дискретных сигналов, модули вывода дискретных сигналов, модули позиционирования линейных приводов с шаговыми двигателями (ШД), усилители сигналов ШД.
Используемый ЦП имеет следующие характеристики:
- микропроцессор с временем выполнения логической операции не более 100 нс;
- рабочая память RAM емкостью не менее 128 Кбайт;
- гибкое расширение системы локального ввода-вывода: подключение до 32 модулей;
- встроенный MPI интерфейс;
- встроенный интерфейс ведущего/ведомого устройства PROFIBUS DP.
Информация от панели оператора ОР через интерфейс MPI поступает в процессор контроллера, обрабатывающий информационные сигналы от датчиков, расположенных на установке, поступающие на модули ввода контроллера. По заданной программе, расположенной в RAM, информационные сигналы обрабатываются контроллером, необходимая информация выводится на панель оператора, через модули вывода и промежуточные преобразователи выдаются управляющие сигналы на ИМ. Управление линейными приводами с шаговыми двигателями осуществляется модулями позиционирования. Управление трехфазным синхронным линейным двигателем вибропривода осуществляется контроллером "SIMODRIVE 611", связанным с СУ установки по PROFIBUS DP.
Установка работает следующим образом.
После включения автоматического режима загерметизированная с одной стороны оболочка 23 транспортным механизмом 20 подается на роликовые опоры 24, а затем открытый конец вводится в стыковочный узел 17 и зажимается.
При помощи средства выгрузки 6 палеты 4 из контейнера поднимаются в укрытие 25 до уровня спутника 9. К торцу палеты пристыковывается спутник 9 и таблетки 3 с палеты сдвигаются на него приводом 8. Пустая палета с помощью вакуумного захвата 7 приводом 10 перемещается в пустой контейнер. Спутник 9 с таблетками стыкуется к спутнику-накопителю 12. Привод 11 сдвигает таблетки на спутник-накопитель 12, затем привод 14 подает его в зону отмера топливного столба и включается вибропривод 17. При помощи привода 13 происходит отмер длины неполного столба непосредственно на спутнике-накопителе 12 и его перемещение на ленточный транспортер 15 и далее на лоток стыковочного узла 16. Стыковочный узел с цанговым зажимом, жестко связанный с вторичной частью 22 вибропривода 17, совершает горизонтальные виброколебания, под действием которых неполный топливный столб вводится в оболочку.
Особенностями установки горизонтального снаряжения является использование в качестве вибропривода 17 трехфазного синхронного линейного двигателя, вторичная часть 22 которого жестко связана со стыковочным узлом 16 с закрепленной в нем оболочкой ТВЭЛа, а узел отмера и подачи таблеток в оболочку выполнен на основе линейного привода 13 с шаговым двигателем.
Метод отмера заданной длины топливного столба снаряжаемых таблеток реализован следующим образом.
Уплотненный (без зазоров между таблетками) топливный столб таблеток, снаряженный в оболочку, должен иметь длину с допуском Lмин≤Lст≤Lмакс, а длина таблетки - Lтмин≤Lт≤Lтмакс.
Значения этих длин заносятся в память системы управления.
Неполные столбы при пошаговом перемещении спутника-накопителя 12 последовательно перемещаются в оболочку толкателем, закрепленном на каретке линейного привода 13 с шаговым двигателем, и ленточным транспортером 15.
Длина столба складывается из длин отдельных неполных столбов, уложенных в ручьях спутника-накопителя 12, и некоторой добавочной длины от неполного столба таблеток на ручье. При этом на ручье спутника-накопителя 12 может оставаться некоторое количество таблеток, составляя остаточную длину неполного столба.
При настройке определяется расстояние Lк между герконовым датчиком SQ1 исходного положения каретки и оптическим датчиком SQ2 границы зоны отмера следующим образом. Каретка линейного привода 13 из исходного положения, определяемого датчиком SQ1, начинает движение со скоростью перемещения таблеток в оболочке Vc, при этом происходит переключение датчика SQ1 из состояния логической 1 в состояние логического 0, что является сигналом начала счета импульсов, поданных на шаговый двигатель. Толкатель, продолжая движение, пересекает луч датчика SQ2 и система управления запоминает количество поданных импульсов от перехода датчика SQ1 из логического состояния 1 в состояние 0 до перехода датчика SQ2 из логического состояния 0 в состояние 1. Значение Lк заносится в память системы управления как постоянная величина.
Длина Lнс неполного столба определяется следующим образом. Спутник-накопитель 12 перемещается в зону отмера до совпадения оси ручья с таблетками с осью снаряжения в оболочку. Каретка линейного привода 13 с закрепленным на ней толкателем из исходного положения начинает движение со скоростью Vc, при этом происходит переключение датчика SQ1 из состояния логической 1 в состояние логического 0. Система управления начинает счет импульсов, поданных на шаговый двигатель. Толкатель, продолжая движение, уплотняет таблетки, и передний торец уплотненного неполного столба пересекает луч датчика SQ2, по сигналу с которого система управления вычисляет длину неполного топливного столба по формуле:
Lнс=Lк-Ls,
где Lнс - длина неполного топливного столба;
Lк - расстояние между датчиком SQ1 и SQ2 (константа);
Ls - путь, пройденный кареткой до появления сигнала от датчика SQ2.
Система управления сравнивает значения длин Lмин и Lнс.
1. Если Lмин≤Lнс, то отмер происходит по следующему алгоритму:
- каретка продолжает движение со скоростью Vc на расстояние Lмин-2*Lтмакс;
- скорость перемещения каретки снижается до скорости Vд, приводящей к дискретизации (разделению) таблеток с помощью ленточного транспортера 15 и их поштучному перемещению через луч датчика SQ2;
- по появлению сигнала и последующему пропаданию сигнала с датчика SQ2 производится перерасчет отмеренной длины Lотм и оставшейся длины Lост при этом:
- если длина Lотм<Lмин, то перемещение каретки продолжается со скоростью Vд, очередная таблетка отделяется от столба и снова производится перерасчет и запоминание Lотм и Lост на данном ручье;
- если длина Lотм≥Lмин, то движение каретки продолжается до срабатывания датчика SQ2.
После снаряжения этого столба в оболочку, производится смена оболочки на позиции снаряжения и сравнение системой управления величин Lмин и Lост. Если Lмин<Lост, то цикл отмера с этого ручья повторяется, если Lмин≥Lост, то оставшийся в ручье столб перемещается со скоростью Vc и каретка перемещается до срабатывания герконового датчика конечного положения каретки SQ3. Спутник подает на позицию отмера следующий неполный столб, определяется его длина и производится добор по п.1.
2. При Lмин>Lнс отмеренный столб передается в оболочку. Спутник перемещается на шаг и следующий ручей с неполным столбом попадает в зону отмера. Аналогично производится отмер и суммирование длины с предыдущей длиной неполного столба. Цикл повторяется.
Система управления вычисляет и запоминает постоянно обновляемые значения сумм длин отмеренных неполных столбов, сравнивает эти значения с Lмин и определяет длину Lдоб неполного столба, необходимую для добора до Lмин по формуле:
Lдоб=Lмин-LΣотм,
где Lдоб - длина столба, которую необходимо добрать;
Lмин - заданная минимально допустимая длина топливного столба;
LΣотм - сумма длин отмеренных неполных столбов.
Каждый раз при отмере полученная длина неполного топливного столба Lнс сравнивается с длиной, которую необходимо добрать Lдоб.
Если Lнс<Lдоб, то каретка продолжает движение со скоростью Vc до срабатывания датчика SQ3.
Если Lнс≥Lдоб, то отмер части столба происходит по следующему алгоритму:
- каретка перемещается со скоростью Vc на расстояние Lдоб-2*Lтмакс;
- скорость перемещения каретки снижается до Vд, что приводит к дискретизации (разделению) таблеток с помощью ленточного транспортера и их поштучному перемещению через луч датчика SQ2;
- по сигналу с датчика SQ2 производится перерасчет и запоминание длины LΣотм и оставшейся длины Lост на данном ручье при этом:
- если длина LΣотм<Lмин, то перемещение каретки продолжается со скоростью Vд, очередная таблетка отделяется от столба, снова производится перерасчет и запоминание длин LΣотм и Lост на данном ручье;
- если длина LΣотм≥Lмин, то движение каретки продолжается до срабатывания датчика SQ2.
Определяется длина столба таблеток, оставшихся на спутнике, фактическая длина отмеренного топливного столба и ее соответствие заданному допуску.
Все длины определяются суммированием импульсов управления, поданных на шаговый двигатель, тем самым отслеживаются перемещения каретки линейного привода. Погрешность отмера определяется параметрами привода. При этом максимальная частота подачи импульсов должна быть меньше или равна частоте приемистости (удержания) шагового двигателя.
Испытания установки показали, что указанный метод отмера длины топливного столба позволяет уменьшить суммарную погрешность длины топливного столба, так как она пропорциональна только числу неполных столбов, и повысить стабильность процесса отмера, а применение вибропривода на основе трехфазного синхронного линейного двигателя с прецизионным инкрементным линейным датчиком положения и адаптивным программным управлением от контроллера позволяет задать оптимальную функцию управления в качестве закона виброколебаний и повысить скорость и стабильность процесса снаряжения оболочек, а следовательно, увеличить производительность установки в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОТМЕРА ДЛИНЫ СТОЛБА СТЕРЖНЕВЫХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ И ПОДАЧИ ТОПЛИВНЫХ ТАБЛЕТОК В ОБОЛОЧКУ | 2010 |
|
RU2448379C1 |
| СПОСОБ И УСТРОЙСТВО СНАРЯЖЕНИЯ ТАБЛЕТКАМИ ОБОЛОЧЕК СТЕРЖНЕВЫХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 1998 |
|
RU2156508C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ СТЕРЖНЕВОГО ТЕПЛОВЫДЕЛЯЮЩЕГО ЭЛЕМЕНТА И ТЕПЛОВЫДЕЛЯЮЩИЙ ЭЛЕМЕНТ ЭНЕРГЕТИЧЕСКОГО ЯДЕРНОГО РЕАКТОРА | 2001 |
|
RU2216797C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ ЯДЕРНОГО РЕАКТОРА | 2010 |
|
RU2459292C1 |
| СПОСОБ КОНТРОЛЯ, РАЗБРАКОВКИ И ПЕРЕРАБОТКИ БРАКА ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2000 |
|
RU2195722C2 |
| УСТРОЙСТВО СНАРЯЖЕНИЯ АВТОМАТИЧЕСКОЙ ЛИНИИ ИЗГОТОВЛЕНИЯ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2002 |
|
RU2236713C2 |
| УСТРОЙСТВО ДЛЯ ГОРИЗОНТАЛЬНОГО СНАРЯЖЕНИЯ ОБОЛОЧЕК ТВЭЛОВ ТАБЛЕТКАМИ | 1995 |
|
RU2100857C1 |
| СПОСОБ СНАРЯЖЕНИЯ И РАЗБРАКОВКИ ТЕПЛОВЫДЕЛЯЮЩЕГО ЭЛЕМЕНТА | 2000 |
|
RU2195718C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2003 |
|
RU2256250C2 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ СБОРКИ ТВЭЛ ДЛЯ ЭНЕРГЕТИЧЕСКИХ ЯДЕРНЫХ РЕАКТОРОВ ТИПА БН | 1994 |
|
RU2094866C1 |
Группа изобретений относится к ядерной технике и предназначено для использования при снаряжении оболочек тепловыделяющих элементов (ТВЭЛ) ядерным топливом в виде таблеток. Способ горизонтального снаряжения таблетками оболочек стержневых ТВЭЛ включает вибрационную подачу топливных таблеток в оболочку, формирование столба топливных таблеток, контроль его длины, доснаряжение оболочки недостающей частью топливных таблеток до заданной длины столба. Формирование столба таблеток осуществляют путем подачи предварительно сформированных неполных столбов топливных таблеток в зону отмера. Осуществляют шаговое перемещение каждого неполного столба внутри этой зоны. На границах зоны установлены датчики. С помощью каретки линейного привода и определяют длину каждого неполного столба путем подсчета количества импульсов. Импульсы подаются на шаговый двигатель перемещения каретки линейного привода от момента срабатывания одного датчика в начале перемещения каретки линейного привода до момента срабатывания другого датчика при прохождении передним торцом неполного столба передней границы зоны отмера. Контроль длины столба топливных таблеток осуществляют по суммарной длине их неполных столбов. Группа изобретений позволяет повысить производительность установки при уменьшении погрешности отмера заданной длины топливного столба. 2 н. и 4 з.п. ф-лы, 4 ил.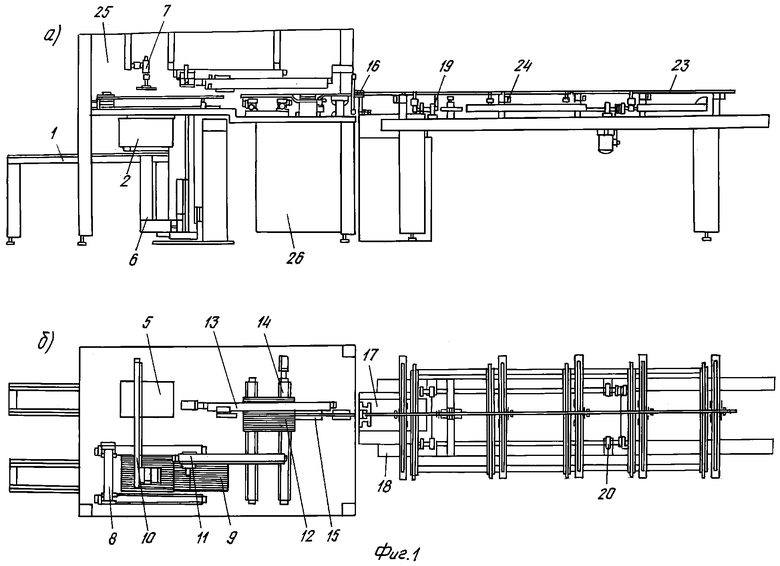
| СПОСОБ И УСТРОЙСТВО СНАРЯЖЕНИЯ ТАБЛЕТКАМИ ОБОЛОЧЕК СТЕРЖНЕВЫХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 1998 |
|
RU2156508C2 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ СБОРКИ ТВЭЛ ДЛЯ ЭНЕРГЕТИЧЕСКИХ ЯДЕРНЫХ РЕАКТОРОВ ТИПА БН | 1994 |
|
RU2094866C1 |
| US 4944912 A, 31.07.1990 | |||
| US 4070240 A, 24.01.1978 | |||
| US 4857260 A, 15.08.1989. | |||

