Изобретение относится к области измерительной техники, а именно к способам определения координат изображения точечных излучателей, и может быть использовано для измерения положения и перемещений объектов, например элементов экрана дисплея, кроме того, изобретение может быть использовано как часть способа оптического контроля качества поверхности.
Бесконтактный контроль качества поверхностей оптических элементов при разработке и изготовлении оптических систем является одной из важных задач на сегодняшний день. Существует способ определения качества (рельефа) поверхности объекта на основе датчика определения волнового фронта Шака-Гартмана, который используют как альтернативу интерферометрам и который способен работать на любой длине волны в диапазоне от 400 до 1064 нм. Датчик определения волнового фронта Шака-Гартмана построен на технологии геометрического измерения фазы отраженного от поверхности объекта излучения. Основной принцип функционирования датчика заключается в следующем: источником излучения облучают поверхность объекта через массив микролинз. Отраженное от поверхности излучение проецируют на поверхность ПЗС (прибор с зарядовой связью) в виде массива изображений точечных излучателей (гартманограммы), после чего измеряют волновой фронт, определяя координаты точек изображения.
Известно несколько способов определения координат изображения точечных источников.
В авторском свидетельстве СССР №1348644 [1] описан способ определения координат светового пятна, в котором формируют изображение светового пятна, преобразуют его в световой сигнал путем дискретного сканирования, определяют положение энергетического центра светового пятна путем анализа составляющих видеосигнала. За координаты светового пятна принимают положение энергетического центра изображения.
Наиболее близким к заявленному изобретению является способ измерения координат объекта по авторскому свидетельству СССР №1342947 [2], который заключается в том, что формируют пространственно связанный с положением объекта оптический сигнал, преобразуют его в дискретный видеосигнал с периодом дискретизации Т, восстанавливают огибающую дискретного видеосигнала и определяют координаты объекта по координате R энергетического центра огибающей относительно начала временного интервала N как разность R=N-ΔN. Для этого осуществляют дискретизацию огибающей с периодом дискретизации Т2<Т1, преобразуют дискретные значения огибающей Ui в двоичный код, измеряют с дискретом Т2 временной интервал N, начало которого совпадает с началом преобразования оптического сигнала, а конец - с последним импульсом дискретного видеосигнала, а величину ΔN определяют как медианное значение огибающей по следующей формуле:
где К - количество дискретизованных оценок огибающей. Данный способ выбран в качестве прототипа заявленного изобретения.
Недостатком способа-прототипа является недостаточно точное соответствие медианного значения положению объекта и необходимость уточнения медианного значения, а процедура вторичной дискретизации неоправданно увеличивает объем анализируемых данных.
Задачей заявленного изобретения является создание способа определения координат, который позволяет существенно повысить точность измерений.
Поставленная задача решена путем создания способа определения координат, который включает в себя следующие операции:
- проецируют изображение на поверхность объекта через массив микролинз, при этом формируют на поверхности объекта массив изображений точечных источников,
- для каждого изображения точечного источника:
- регистрируют точечное изображение матричным фотоприемником и преобразуют его в электрический сигнал,
- преобразуют электрический сигнал в дискретный,
- оцифровывают дискретный сигнал в нескольких точках и формируют огибающую сигнала;
- определяют положение и величину максимума огибающей сигнала;
- определяют значения производных сигнала в точках, где сигнал был оцифрован;
- формируют рассогласования относительно опорного сигнала в точках, где сигнал был оцифрован;
- обрабатывают рассогласования фильтром Калмана и определяют координаты изображения.
Техническим результатом заявленного изобретения является повышение точности определения координат изображения точечного источника на поверхности объекта за счет аппроксимации изображения поверхностью второго порядка, определения рассогласования изображений при двух различных рельефах поверхности объекта с последующим применением фильтра Калмана.
Для лучшего понимания настоящего изобретения далее приводится его подробное описание с соответствующими чертежами.
Фиг.1 - блок-схема системы для выполнения заявленного способа определения координат согласно изобретению.
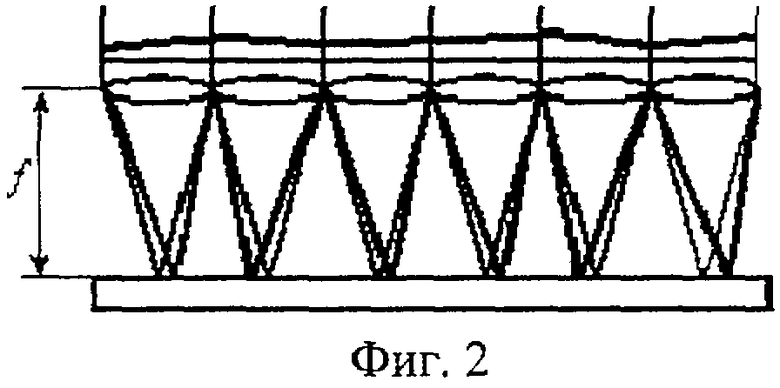
Фиг.2 - схема массива микролинз, выполненная согласно изобретению.
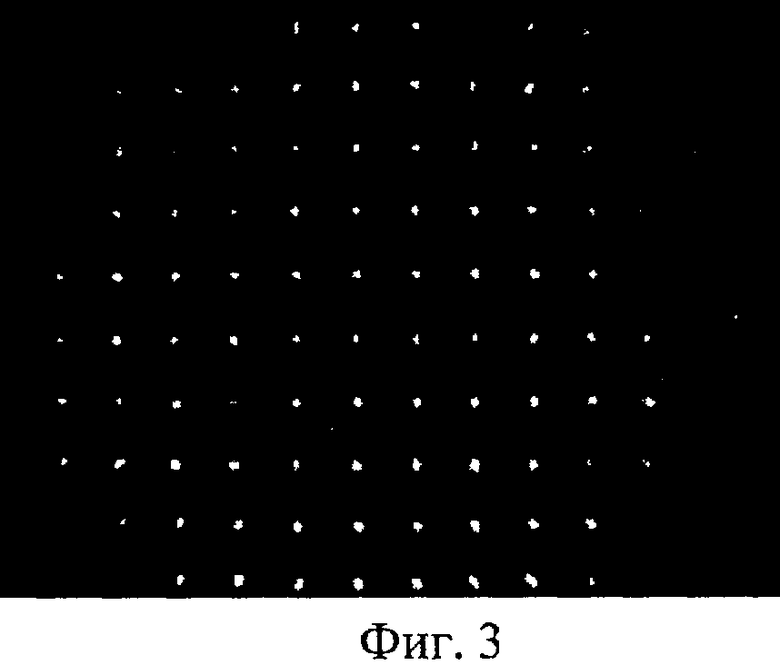
Фиг.3 - схема матрицы изображений точечных источников, выполненная согласно изобретению.
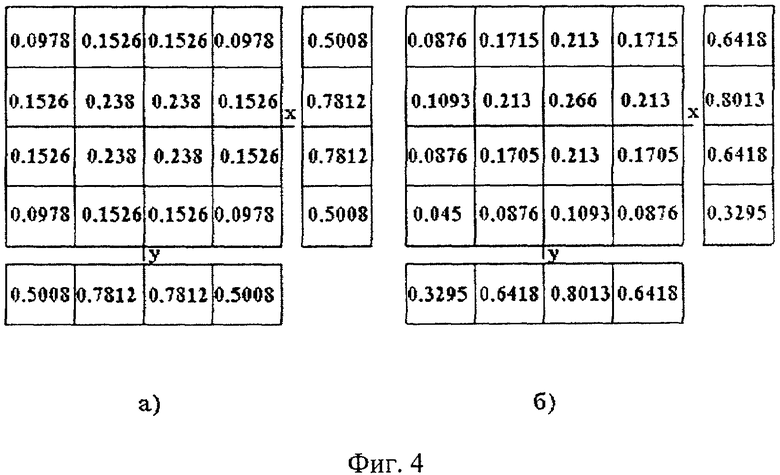
Фиг.4 - схема формирования подматриц сигнала.
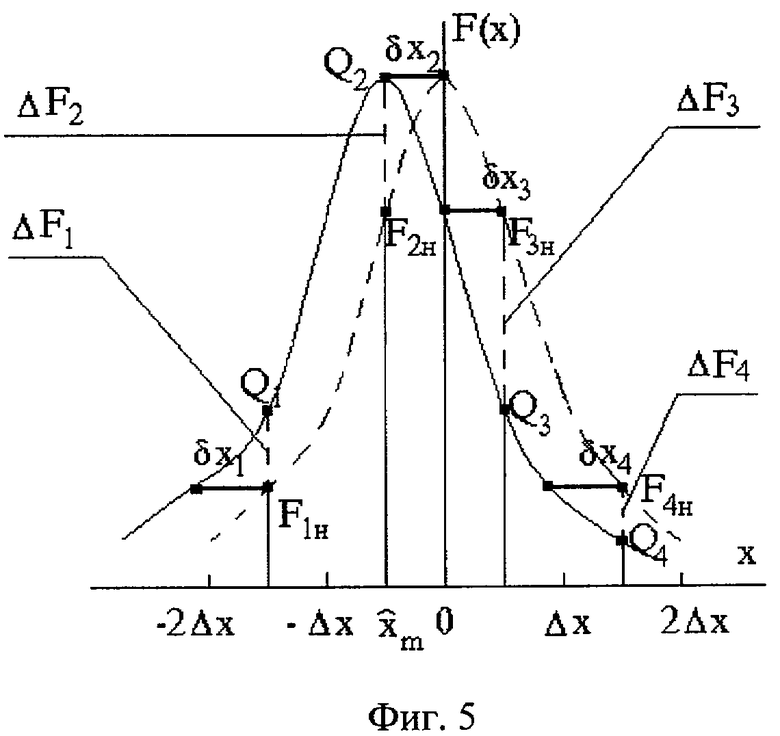
Фиг.5 - схема принципа формирования рассогласований.
Система для выполнения заявленного способа определения координат содержит соединенные источник 1 изображения, массив 2 микролинз, блок 3 регистрации изображения и формирования дискретного сигнала, блок 4 формирования огибающей сигнала, блок 5 определения положения максимума огибающей, блок 6 дифференцирования, блок 7 формирования рассогласований и фильтр 8 Калмана.
При выполнении способа полагают, что в данной оптико-электронной системе точно известна импульсная характеристика тракта первичной обработки, представляющая собой функцию рассеяния точки источника изображения, которую преобразуют блоком 3, выполненным на основе матричного фотоприемника, и формируют дискретный сигнал, который хранят в виде оцифрованной подматрицы. Размер подматрицы составляет 4×4 элемента. Можно показать, что эти условия соответствуют возможности достижения минимальной погрешности оценки координат изображения. Это изображение будет также занимать подматрицу размером 4×4 элемента, а положение максимума распределения освещенности или координаты главного луча может быть произвольным в пределах элемента разложения, т.е. периода дискретизации. По полученной картине распределения зарядов и известной импульсной характеристике, условно называемой «опорной функцией», точно привязанной к центру координат подматрицы и соответственно всей матрицы, уточняют координаты полученного изображения относительно центра подматрицы, а именно определяют рассогласование между опорной функцией и полученным распределением картины зарядов по изображению. Поскольку точек изображения, в которых требуется оценить рассогласования, несколько, например, в одномерном случае их четыре, а в двумерном - шестнадцать, и соответственно столько же значений или реализации рассогласования, то они могут быть обработаны с привлечением статистических методов с целью уменьшения случайных погрешностей по одному кадру или по одной реализации сигнала. Наиболее удобным с точки зрения быстродействия и точности для этой цели является фильтр 8 Калмана.
Рассмотрим более подробно осуществление заявленного способа.
На Фиг.4а приведена опорная функция, а на Фиг.4б реализация полезного сигнала без шумов. Для демонстрации возможностей способа и оценки его точности и сходимости обе картины были сформированы путем моделирования. В качестве базовой модели была принята двухмерная симметричная функция Гаусса вида
 А=0,266, α=0,222
А=0,266, α=0,222
При моделировании опорной функции предполагалось, что положение максимума функции Гаусса совпадает с центром подматрицы 4×4 элемента, а при моделировании реализации изображения максимум функции Гаусса был смещен на 0,5 элемента по обеим осям, т.е. x0=0,5Δх, у0=-0,5Δх. Это наиболее неблагоприятный случай для данного метода, с точки зрения достижения требуемой точности. Величина сигнала в каждом элементе принималась равной значению функции Гаусса в центре данного элемента для упрощения вычислений. Это, как будет ясно из дальнейшего изложения, не внесло дополнительной погрешности в оценки. Таким образом, была получена точно известная опорная функция и реализация изображения, положение которого относительно центра подматрицы или относительно опорной функции необходимо оценить.
Сначала проецируют изображение, сформированное источником 1 изображения, на поверхность объекта через массив 2 микролинз (Фиг.2), при этом формируют на поверхности объекта массив точечных изображений (Фиг.3). Для каждого точечного изображения регистрируют точечное изображение в блоке 3 матричным фотоприемником и преобразуют его в электрический сигнал. В результате данной операции формируют массив подматриц, в элементах которых происходит преобразование оптического сигнала в электрический и его накопление в электронном виде. После этого выделяют подматрицы, занятые полезным сигналом.
Следующим этапом обработки является обработка подматриц, а именно формирование линеек по осям "х" и "у", каждая из которых содержит четыре элемента. Элементы линеек определяются следующим образом
где i - номер строки;
j - номер столбца;
Qij - величина сигнала в элементе i-той строки j-того столбца подматрицы или матрицы.
Как следует из этого, каждый элемент линейки, например по оси "х", представляет собой сумму элементов столбца подматрицы, соответствующего данному элементу. Например, первый элемент по оси "х" есть сумма элементов первого столбца подматрицы. Аналогично формируется и линейка по "у", только суммирование производят уже не по столбцам, а соответственно по строкам. В дальнейшем, до особого упоминания, будем рассматривать все операции применительно к оси "х". Операция по оси "у" аналогичны.
Теперь необходимо определить рассогласование между опорной функцией и сформированной из изображения линейкой по оси "х" (Фиг.5). Для этого формируют огибающую сигнала в блоке 4 формирования огибающей сигнала, для чего используют аналитическое описание распределения отсчетов по линейке в виде усеченного ряда Фурье.

где

Такое описание дает возможность осуществить нормировку опорной функции и сформированной линейки, а также определить искомые рассогласования в точках x1=-1,5Δх; x2=-0,5Δх; x3=0,5Δх; x4=1,5Δх. Рассмотрим сначала операцию нормировки, для чего необходимо определить положение и величину максимума огибающей сигнала Q(x) в блоке 5. Можно показать, что положение максимума определяется как

тогда

а нормированные значения сформированной линейки и опорной функции F(x) определяют как

Далее уже по вновь сформированным линейкам Qx1H, ..., Qx4H;
F1H, ..., F4H определяют новые коэффициенты а0н, а1н, а2Н для опорной функции и обрабатываемой реализации сигнала.
На следующем этапе формируют в блоке 7 рассогласования относительно опорного сигнала в точках, где сигнал был оцифрован δх1÷δх4, которые могут быть найдены как
где
ΔF1=F1H-Qx1H, ..., ΔF4=F4H-Qx4H.
Для определения рассогласований в блоке дифференцирования 6 находят значения производных сигнала в точках, где сигнал был оцифрован. Производные, стоящие в знаменателе, определяют как

и имеют значения в соответствующих точках


На заключительном этапе обрабатывают полученные рассогласования с помощью фильтра 8 Калмана и определяют координаты изображения с тем, чтобы получить оценку δx. В нашем случае выражения для обработки рассогласований имеют вид
B(k)=P*(k)/[P*(k)+Δ2]


где Δ2 - дисперсия систематической (или методической) погрешности определения δх, не превышает (0,05 Δx)2;
Р* - в общем случае матрица дисперсий, а в нашем случае - дисперсия случайной погрешности "измерения" величины δх. Она в реальном приборе искажена как внешними помехами, так и внутренними шумами. Поскольку в примере рассматривается система без помех, то случайная погрешность обусловлена лишь погрешностью вычисления и округления значений сигнала. Р*представляет собой нормированную величину и определяется как
где σФ является СКО погрешности, обусловленной помехами.
Отметим, что Р*˜ на 2 порядка меньше Δ2. Этого достаточно для вычисления первого значения В - коэффициента усиления фильтра.
Особенность процедуры фильтрации заключается в том, что обработке подвергаются всего четыре значения δx1÷δх4 в несколько итераций до сходимости с требуемой точностью. То есть в процессе первой итерации обрабатываются рассогласования, полученные по методике, изложенной выше. В процессе второй итерации обрабатывают их оценки и т.д. до тех пор, пока не будет достигнута требуемая точность либо не выполнено заданное число итераций.
Заявленное изобретение позволяет уменьшить погрешность определения координат до 0,01 элемента матрицы. Оно позволяет увеличить точность построения трехмерного волнового фронта. Использование быстрых и эффективных способов обработки изображения дает возможность исследования поверхности объекта в реальном времени. В частности, совокупность скорости выполнения и точности заявленного способа позволяет увеличить точность оптического устройства дешевым способом.
Предложенное изобретение может быть использовано при производстве проекционных оптических устройств для контроля поверхностей зеркал и линз, а именно в следующих областях: контроль деформируемых зеркал Xinetics, контроль деформируемых зеркал ОКО, восстановление волнового фронта, устранение оптических аберраций, атмосферная адаптивная оптика, лазерная резка и сверление, офтальмология, лазерная связь, дистанционный сбор данных, контроль линз и зеркал, измерение волнового фронта лазерного излучения, управление производством и качеством, оптическая юстировка, профилирование световых пучков.
Способ определения координат включает в себя следующие операции: проецируют изображение на поверхность объекта через массив микролинз, при этом формируют на поверхности объекта массив точечных изображений. Каждое точечное изображение регистрируют матричным фотоприемником и преобразуют его в электрический сигнал, а затем преобразуют его в дискретный сигнал. Оцифровывают дискретный сигнал в нескольких точках и формируют огибающую сигнала. Затем определяют положение и величину максимума огибающей сигнала, определяют значения производных сигнала в точках, где сигнал был оцифрован, и формируют рассогласования относительно опорного сигнала в точках, где сигнал был оцифрован. Обрабатывают рассогласования фильтром Калмана и определяют координаты точечного изображения. Технический результат - повышение точности измерений. 5 ил.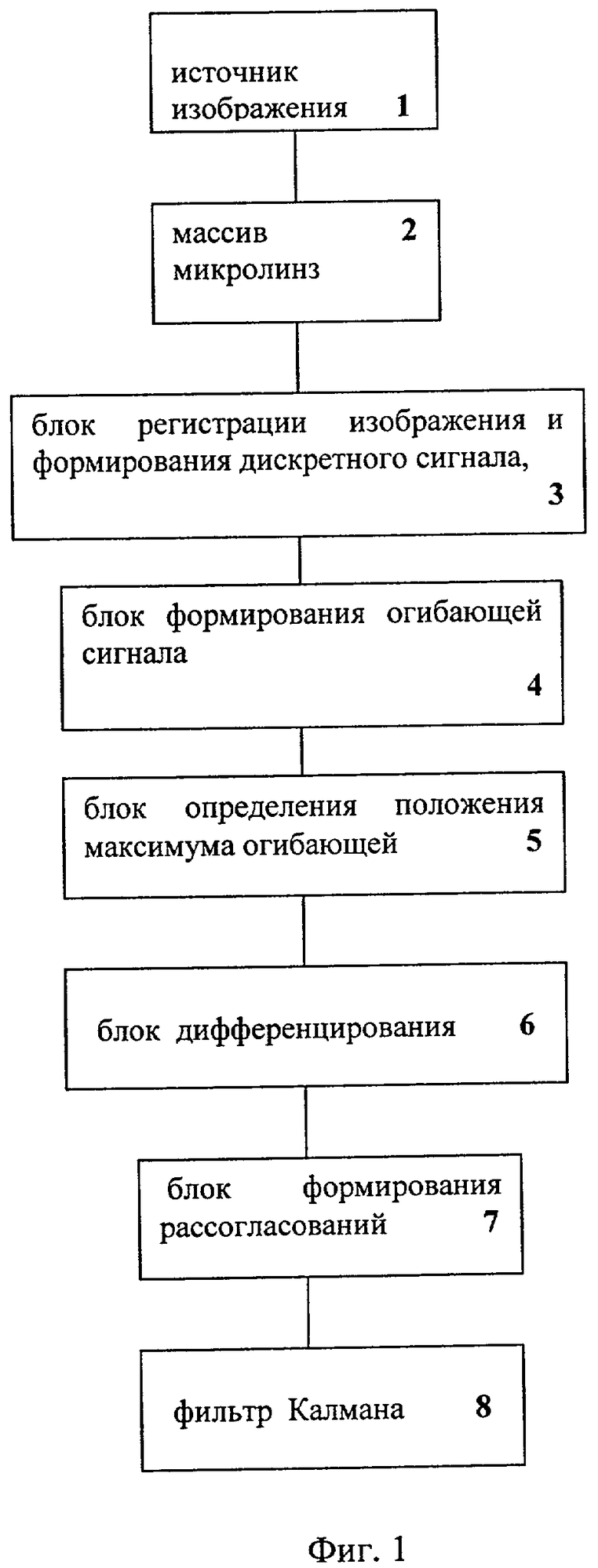
Способ определения координат, включающий в себя следующие операции: проецируют изображение на поверхность объекта через массив микролинз, при этом формируют на поверхности объекта массив точечных изображений; для каждого точечного изображения: регистрируют точечное изображение матричным фотоприемником и преобразуют его в электрический сигнал; преобразуют электрический сигнал в дискретный; оцифровывают дискретный сигнал в нескольких точках и формируют огибающую сигнала; определяют положение и величину максимума огибающей сигнала; определяют значения производных сигнала в точках, где сигнал был оцифрован; формируют рассогласования относительно опорного сигнала в точках, где сигнал был оцифрован; обрабатывают рассогласования фильтром Калмана и определяют координаты точечного изображения.
| SU 13448644 A1, 30.10.1987 | |||
| JP 57045406 A, 15.03.1982 | |||
| US 3649122 A, 14.03.1972 | |||
| Фильтр Калмана | 1987 |
|
SU1385265A1 |
| Способ определения положения объекта | 1988 |
|
SU1744461A1 |

