Изобретение относится к измерительной технике и может быть использовано при определении положения и перемещений объектов.
Известен способ определения положения энергетического центра. Он заключается в том, что формируют изображение светового пятна, преобразуют его в видеосигнал путем дискретного сканирования полученного изображения, а энергетический центр определяют путем анализа составляющих видеосигнала.
Недостатком известного способа является недостаточная точность определения положения центра пятна.
Наиболее близким по технической сущности и достигаемому эффекту является способ измерения положения объекта, заключающийся в том, что формируют пространственно связанный с положением объекта оптический сигнал, преобразуют его в дискретный видеосигнал с периодом дискретизации Т, восстанавливают огибающую дискретного видеосигнала и определяют положение объекта по координате R энергетического центра огибающей относительно начала временного интервала N как разность R N-AN.
Для этого осуществляют дискретизацию огибающей с периодом дискретизации , преобразуют дискретные значения огибающей U; в двоичный код, измеряют с дискретом Та временной интервал N, начало которого совпадает с началом преобразования оптического сигнала, а конец - с последним импульсом дискретного видеосигнала, а величину А N определяют как медианное
4
о
значение дискретизированных значений огибающей по следующей формуле:
AN
I tu,
I 11 1
Ь
где К - количество дискретизированных оценок огибающей.
Недостатком способа является то, что медианное значение недостаточно точно соответствует положению объекта и требует уточнения, а процедура вторичной дискретизации неоправданно увеличивает объем анализируемых данных.
Целью изобретения является повышение точности определения положения объекта путем коррекции дискретизированного видеосигнала на основе анализа самого видеосигнала.
Сущность изобретения заключается в том, что в способе определения положения объекта, заключающемся в формировании пространственно связанного с положением объекта оптического сигнала, преобразовании его в дискретизированный сигнал и формировании сигнала положения центра огибающей, определяют значения производных в точках дискретизации оптического сигнала, формируют скорректированный дискретизированный сигнал путем суммирования исходного дискретизированного сигнала с сигналами, пропорциональными произведению производной оптического сигнала в точке дискретизации на сформированный сигнал положения максимума огибающей, восстанавливают огибающую скорректированного дискретизированного сигнала, а положение объекта определяют по положению центра огибающей скорректированного сигнала.
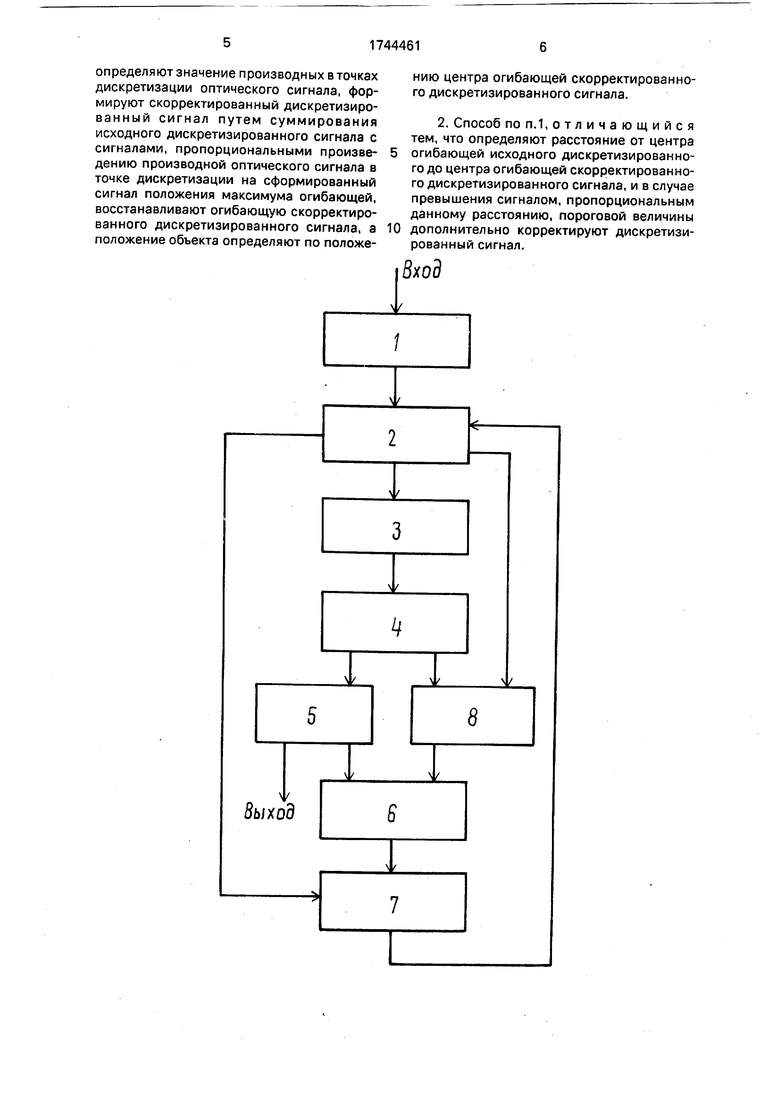
На чертеже представлена блок-схема устройства, осуществляющего способ.
Устройство состоит из последовательно соединенных блока 1 формирования оптического изображения светового пятна, блока 2 формирования дискретизированного сигнала, блока 3 формирования огибающей видеосигнала, блока 4 дифференцирования огибающей, блока 5 определения положения максимума огибающей, блока 6 формирования поправки и сумматора 7 сигналов, выход которого подключен к второму входу блока 2, второй выход которого подключен к второму входу сумматора 7, и блока 8 запоминания, входы которого подключены к второму выходу блока 4 и третьему выходу
блока 2, а выход подключен к второму входу блока 6.
Способ осуществляют следующим образом.
Блок 1 формирует изображение точечного излучателя на поверхности блока 2. Блок 2 дискретизирует оптическое излучение и преобразует его в электрические сигналы вида f(ti, t2tn). Затем в блоке 3
восстанавливается огибающая видеосигнала в виде f(t). Блок 4 выполняет дифференцирование огибающей видеосигнала df/dt, а блок 5 определяет момент изменения знака производной df/dt 0, соответствующий положению максимума огибающей т.Макс.
Одновременно определяют значения производной в моменты, соответствующие размещению импульсов исходного дискретизированного видеосигнала df/dt ti,t2,...,tn. После чего формируют сигнал поправки как произведение A f тмакс df/dt
ti,t2tn в точках дискретизации видеосигнала и корректируют исходный видеосигнал, прибавляя сигнал поправки с учетом
знака сигнала f (xi.x2xn) f(xi,x2хп) +
(xi,x2,...,xn).
После этого вновь восстанавливают огибающую уже скорректированного видеосигнала f (х), дифференцируют его df 7dt и определяют скорректированное положение максимума огибающей trnaKc,;, которое связывают с искомым положением объекта.
Если задана требуемая точность коррекции, то определяют расхождение между исходным и скорректированным положением максимума At twaicc - 1Макс, сравнивают
это расхождение с заданным пороговым значением Atnopor и в случае превышения порога выполняют следующий этап коррекции в той же последовательности.
Предлагаемое изобретение позволяет
повысить точность определения положения излучателя по сравнению с прототипом, так как определяют действительное положение максимума, искаженное наблюдательной системой при дискретизации. Положение
точки определяют точнее, чем интервал дискретизации, приблизительно в десять раз. Формула изобретения 1. Способ определения положения объекта, заключающийся в том, что формируют
пространственно связанный с положением объекта оптический сигнал , преобразуют его в дискретизированный сигнал и формируют сигнал положения центра огибающей, отличающийся тем, что, с целью
повышения точности, после восстановления огибающей дискретизированного сигнала определяют положение ее максимума,
определяют значение производных в точках дискретизации оптического сигнала, формируют скорректированный дискретизиро- ванный сигнал путем суммирования исходного дискретизированного сигнала с сигналами, пропорциональными произведению производной оптического сигнала в точке дискретизации на сформированный сигнал положения максимума огибающей, восстанавливают огибающую скорректированного дискретизированного сигнала, а положение объекта определяют по положе0
нию центра огибающей скорректированного дискретизированного сигнала.
2. Способ по п. 1,отличающийся тем, что определяют расстояние от центра огибающей исходного дискретизированного до центра огибающей скорректированного дискретизированного сигнала, и в случае превышения сигналом, пропорциональным данному расстоянию, пороговой величины дополнительно корректируют дискретизи- рованный сигнал.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2006 |
|
RU2304760C1 |
| Способ измерения положения объекта | 1986 |
|
SU1348644A1 |
| Способ формирования телевизионного сигнала цветного изображения и устройство для его реализации | 1983 |
|
SU1211892A1 |
| СПОСОБ ПОСТРОЕНИЯ ПРОФИЛЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091710C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЦЕЛИ В БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2015 |
|
RU2597221C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| ДЕКОДЕР ДЛЯ ДЕКОДИРОВАНИЯ МУЛЬТИМЕДИЙНОГО СИГНАЛА И КОДЕР ДЛЯ КОДИРОВАНИЯ ВТОРИЧНЫХ МУЛЬТИМЕДИЙНЫХ ДАННЫХ, СОДЕРЖАЩИХ МЕТАДАННЫЕ ИЛИ УПРАВЛЯЮЩИЕ ДАННЫЕ ДЛЯ ПЕРВИЧНЫХ МУЛЬТИМЕДИЙНЫХ ДАННЫХ | 2015 |
|
RU2679379C2 |
| СИСТЕМА ЖЕЛЕЗНОДОРОЖНОЙ РАДИОСВЯЗИ | 2010 |
|
RU2464193C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1986 |
|
RU2107928C1 |
Изобретение относится к контрольно- измерительной технике. Цель изобретения - повышение точности. Способ заключается в формировании дискретизированного сигнала и определении положения источника света по данному сигналу. Повышение точности достигается коррекцией дискретизированного сигнала на величины, пропорциональные производным сигнала в точках дискретизации. 1 ил.
1
Вход
2
«V
JL
| Основный регулятор ткацкого станка | 1986 |
|
SU1342947A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
