Изобретение относится к автоматическому управлению и может быть использовано для управления пространственным положением объекта.
Цель изобретения повышение надежности работы датчиков системы автоматического управления пространственным положением объекта.
На фиг. 1 представлена структурная схема устройства резервирования датчиков; на фиг. 2 схема дешифратора; на фиг. 3 схема коммутатора.
Устройство резервирования датчиков содержит датчики 1 8, коммутаторы 9 12, сумматоры 13 и 14, компараторы 15 20, дешифратор 21 и регистр 22.
Датчики 1 и 2 измеряют параметры движения объекта относительно его инерционной оси X, датчики 3 и 4 относительно оси Y, датчики 5 и 6 - относительно оси Z, датчики 7 и 8 относительно оси А, составляющей с осями X, Y и Z одинаковый угол α (оси X, Y и Z ортогональны).
Компараторы 17 20 предназначены для сравнения данных измерений, поступающих с датчиков 1 8. Сигнал rj на выходе такого компаратора равен "1" при Ij1 Ij2, где Ij1 информация, снимаемая с i-го датчика канала j(i=1, 2; j=X, Y, Z, A).
Компараторы 15, 16 предназначены для сравнения содержимого сумматоров 13, 14 с "0":
rU1 1, если U1≠0,
rU2=1, если U2≠0,
где rU1, i=1,2 выходной сигнал компаратора;
U1, U2 информация, снимаемая с выходов сумматоров 13 и 14 соответственно.
Дешифратор 21 предназначен для управления триггерами регистра 22, запоминающими состояние датчиков 1 8. Он представляет собой дешифратор на шесть входов с логическими связями между шинами и имеет восемь выходов Z1,Z8.
Если входным сигналам дешифратора присвоить веса следующим образом:
вес rx 1; вес ry 2;
вес rz 4; вес ra 8;
вес ru1 16; вес ru2 32,
для выходов Zj можно перечислить рабочие наборы выходных переменных так:
Z1=V (17, 19, 21, 23, 25, 27, 29, 31, 49), (I)
Z2=V (33, 35, 37, 39, 41, 43, 45, 47, 49), (I)
Z3=V (18, 19, 22, 23, 26, 27, 30, 31, 50), (I)
Z4=V (34, 35, 38, 39, 42, 43, 46, 47, 50), (I)
Z5=V (20- 23, 28 52), (I)
Z6=V (36 39, 44 52), (I)
Z7=V (24 31, 56), (I)
Z8=V (40 47, 56) (I)
Регистр 22 (фиг. 2) предназначен для запоминания факта отказа каждого из восьми датчиков и состоит из четырех пар триггеров с раздельной установкой: j-я пара триггеров запоминает факт отказа датчиков канала j(j=X, Y, Z, A) и управляет коммутаторами каналов 9 12. Исходное состояние триггеров - нулевое, а запись в i-й  триггер происходит при возбуждении выхода Zi дешифратора 21.
триггер происходит при возбуждении выхода Zi дешифратора 21.
Выходы 23-го и 24-го триггеров (X-пара) подключены к четвертым входам коммутатора 9 канала X;
выходы 25-го и 26-го триггеров (Y-пара) подключены к четвертым входам коммутатора 10 канала Y;
выходы 27-го и 28-го триггеров (Z-пара) подключены к четвертым входам коммутатора 11 канала Z;
выходы 29-го и 30-го триггеров (А-пара) подключены к третьим входам коммутатора 12 канала А.
Вход дешифратора 21 с весом 1 подключен к выходу компаратора 17, вход с весом 2 к выходу компаратора 18, вход с весом 4 к выходу компаратора 19, вход с весом 8 к выходу компаратора 20, вход с весом 16 к выходу компаратора 15, вход с весом 32 к выходу компаратора 16, а выход Z1 дешифратора подключен к входу установки в "1" первого триггера регистра 22, выходы Z2 Z8 второго восьмого триггеров регистра 22.
Коммутаторы 9 12 каналов j (фиг. 1) имеют каждый первые информационные входы 1, подключенные к выходам нечетного датчика канала j(j=X, Y, Z, A);
вторые информационные входы 2, подключенные к выходам четвертого датчика канала j.
Коммутаторы 9 11, кроме того, имеют каждый третьи информационные входы 3, подключенные к выходам сумматора 13 измерений нечетных датчиков.
Третьи (управляющие) входы 4 коммутатора 12 подключены к выходам А-пары триггеров регистра 22.
Четвертые (управляющие) входы 4 коммутаторов 9 11 подключены к выходам j-ой пары (j=X, Y, Z) триггеров регистра 22.
Коммутаторы 9 12 имеют каждый первые выходы 1, подключенные к входам сумматора 14 измерений четных датчиков;
вторые выходы 2, подключенные к входам сумматора 13 измерений нечетных датчиков.
Третьи выходы 3 коммутаторов 9 11 являются выходами устройства резервирования датчиков и подключены к регулятору системы управления.
Схемы коммутаторов реализуют следующую систему логических функций: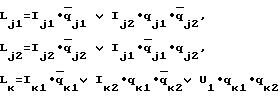
где Lji вектор столбец n-функций выходов i (i=1, 2, 3) коммутатора канала j;
Ijν(Iкν) вектор столбец сигналов на n входах ν(ν=1,2) j-го (k-го канала);
U1 вектор столбец сигналов на выходах сумматора 13, т.е. на входах 3 каждого из каналов X, Y, Z;
qjμ(qкμ) сигнал на прямом выходе m-го триггера (m=1,2) j-ой (k-ой) пары регистра 22;
n разрядность информации, циркулирующей в устройстве.
Функциональная схема коммутатора канала j (j=X, Y, Z) может иметь вид, приведенный на фиг. 3.
В зависимости от состояний 1-ой пары триггеров 23, 24 регистра 22:
ключ SW1 31 соединяет выходы Lj1 либо с входами Ij1, либо с входами Ij2;
ключ SW2 32 соединяет выходы Lj2 либо с входами Ij2, либо с входами Ij1;
ключ SW3 33 соединяет выходы Lj, либо с входами Ij1, либо с входами Ij2, либо с входами U1.
В коммутаторе канала А нет ключа SW3.
Рассмотрим работу устройства.
В исходном состоянии в триггеры регистра 22 записаны нули (подается сигнал на шину установки регистра 22 в исходное):
Поэтому
Lj1 Ij1,
Lj2=Ij2,
Lk= Ik1, j= X, Y, Z, A; k=X, Y, Z, т.е. на входы сумматора 13 поступает информация от нечетных датчиков 1, 3, 5, 7;
на входы сумматора 14 от четных датчиков 2, 4, 6, 8;
на блок выработки команд информация от датчиков 1, 3, 5.
Если все узлы устройства работоспособны, каждый из компараторов 17 20 принимает от обоих датчиков одинаковую информацию, и на его выходе сигнал равен "0":
Ij1=Ij2, rj=0, j=X, Y, Z, A
Таким образом, коммутаторы 9 11 находятся в таком состоянии, что на вычитающие входы сумматора 13 проходят сигналы с датчиков 1, 3 и 5, а на вычитающие входы сумматора 14 с датчиков 2, 4, 6. Сигналы же с датчиков 7 и 8 через коммутатор 12 попадают на суммирующие входы соответственно сумматоров 13 и 14. Сигналы на выходе сумматоров 13 и 14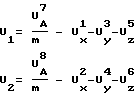 (1)
(1)
где Ux, Uy, Uz, Ua сигналы с датчиков 1 - 8;
m коэффициент пропорциональности (он постоянен и равен cosα).
Когда показания всех датчиков правильны, всегда должны выполняться соотношения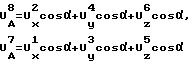 (2)
(2)
Если выполняются соотношения (2), U1= U2=0. Поэтому выходные сигналы компараторов 15, 16 также равны "0".
Таким образом, на входах дешифратора 21 сигналы равны "0" и ни один из его выходов не возбужден. Сохраняется исходное состояние регистра 22 и коммутаторов 9 12.
Пусть отказывает датчик 1 канала X, так что
Ix1≠Ix2, U1≠ 0,
и компараторы 17 и 15 формируют единичные сигналы
rx≠ru1 1
Возбуждаются входы дешифратора 21, которые имеют веса 1 и 16, поэтому появляется выходной сигнал Z1, переводящий первый триггер 23 регистра 22 в единичное состояние. Остальные триггеры остаются в состоянии "0":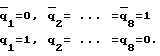
Поэтому изменяется состояние коммутатора 9:
Lx1 Ix2;
Lx2 Ix2;
Lx Ix2
т. е. информация с датчика 2 начинает поступать как на входы сумматора 14, так и на входы сумматора 13. Состояние коммутаторов 10 12 не изменяется.
При отказах двух датчиков, например датчиков, измеряющих параметры движения объекта относительно оси X, показания датчиков 1 и 2 не совпадают между собой. Тогда U1≠ 0, U2≠ 0 и Ix1≠Ix2 и единичные сигналы появляются на выходах компараторов 17, 15, 16:
rx ru1 1, ry rz rA 0
Сигналы на выходах сумматоров 13 и 14 (3)
(3)
Если показания датчиков UA, Uy, Uz верны, U1=U
Благодаря воздействию единичных сигналов с компараторов 17, 15, 16
rx ru1 ru2 1, ry rz rA 0
у дешифратора 21 возбуждаются входы с весами 1, 16, 32, т.е. на входах появляется набор 49 и возбуждаются выходы Z1 и Z2. Этими сигналами записывается "1" в первый 23 и второй 24 триггеры регистра 22, т.е. в оба регистра X-пары. Состояния остальных триггеров не изменяются:
Изменяется состояние ключей коммутатора 9:
Lx1 Lx2 0, Lx U1
т.е. входы сумматоров 14 и 13 отключаются от датчиков 1 и 2.
Таким образом, устройство резервирования датчиков позволяет устранить отказ одного из датчиков или даже группы датчиков в системе управления пространственным положением объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Устройство для автоматического управления (его варианты) | 1984 |
|
SU1249481A1 |
| Устройство контроля | 1985 |
|
SU1291931A1 |
| Устройство для определения координат центра яркости следа дефекта детали | 1985 |
|
SU1280506A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ (2 ВАРИАНТА) | 2014 |
|
RU2580476C1 |
| Вероятностный преобразователь аналог-код | 1986 |
|
SU1363461A1 |
| Устройство для автоматической компенсации погрешности измерительного канала | 1989 |
|
SU1675853A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ | 2000 |
|
RU2160919C1 |
| Устройство для декодирования сверточного кода | 1991 |
|
SU1839281A1 |
| Цифровой обнаружитель-измеритель частоты | 1989 |
|
SU1797127A1 |


Изобретение может быть использовано для резервирования датчиков в системе управления пространственным положением объекта. Целью изобретения является повышение надежности системы управления пространственным положением объекта. Для этого в систему управления пространственным положением объекта дополнительно введены дешифратор 21, регистр 22, компараторы 15 - 20 и второй сумматор 13. Наличие данных блоков позволяет, в случае отказа одновременно двух датчиков, измеряющих параметры относительно какой-либо одной оси, формировать на выходе сумматоров сигналы, не равные нулю (если отказов датчиков нет, сигнал на выходе сумматоров равен нулю), по наличию которых компараторы 15 - 20, дешифратор 21 и регистр 22 определяют с высоким быстродействием факт отказа одновременно двух датчиков. 3 ил.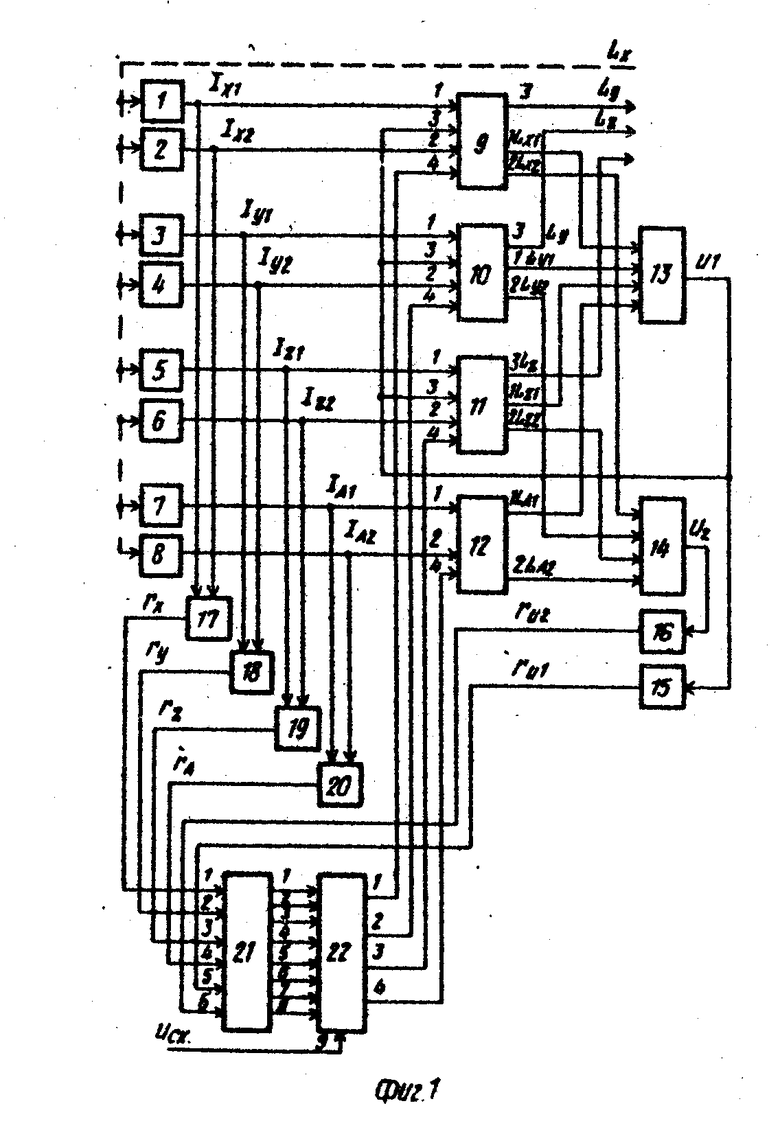
Устройство резервирования датчиков в системе управления пространственным положением объекта, содержащее четыре пары датчиков, четыре коммутатора, первые и вторые информационные входы которых связаны с выходами соответствующих датчиков каждой пары, сумматор, к входам которого подключены первые выходы коммутаторов, отличающееся тем, что, с целью повышения надежности работы датчиков, оно дополнительно содержит дешифратор, регистр, шесть компараторов и второй сумматор, входы которого подключены к вторым выходам коммутаторов, выход первого сумматора подключен к третьим информационным входам первого, второго и третьего коммутаторов и входу первого компаратора, выход второго сумматора соединен с входом второго компаратора, к каждой паре входов третьего, четвертого, пятого и шестого компараторов подключены выходы соответственно первой, второй, третьей и четвертой пар датчиков, а выходы этих компараторов соединены соответственно с первого по четвертый входами дешифратора, пятый вход которого соединен с выходом первого сумматора, а шестой вход с выходом второго компаратора, восемь выходов дешифратора соединены соответственно с соответствующими информационными входами регистра, вход установки в нулевое состояние которого подключен к шине установки исходного состояния устройства, первый, второй и третий выходы регистра соответственно соединены с управляющими входами первого, второго и третьего коммутаторов, а четвертый выход регистра подключен к управляющему входу четвертого коммутатора.
| Система управления пространственным положением объекта | 1974 |
|
SU489078A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
