Изобретение относится к навигационной технике и может быть использовано при проектировании интегрированных инерциально-спутниковых навигационных систем для различных транспортных средств.
Одним из основных требований к навигационным системам является их автономность и непрерывность функционирования при обеспечении достаточной точности, обеспечивающей безопасность управления транспортным средством.
Известна система [1], которая содержит радиоприемник, соединенный через усилитель с антенной, а выходами подключенный к вычислителю местоположения навигационных спутников, подключенному другими входами к блоку начальной установки альманаха данных об орбитах спутников, а выходы этого вычислителя соединены с входами блока выделения радиовидимых спутников. Выходы этого блока подключены к входам блока выделения рабочего созвездия спутников, соединенного выходами с входами блока вычислителя местоположения потребителя. Кроме того, в систему входят измеритель проекций абсолютной угловой скорости, состоящий их трех ортогонально установленных лазерных гироскопов, измеритель проекций кажущегося ускорения, включающий три акселерометра, установленных по соответствующим осям лазерных гироскопов. Указанные измерители через блоки коррекции подключены к вычислителю навигационных параметров, выходы которого связаны через третий блок коррекции с выходами системы и с выходами дисплея, при этом часть выходов системы подключена к входам блока выделения радиовидимых спутников, а часть выходов вычислителя навигационных параметров подключена к первой группе входов анализатора достоверности информации, другая группа входов которого соединена с выходами блока вычисления местоположения потребителя. Выходы анализатора через блок ключей связаны с входами навигационного фильтра, первая группа выходов которого соединена соответственно с входами двух блоков коррекции, а вторая группа выходов подключена к входам третьего блока коррекции.
Известная система довольно точно решает задачу навигации в условиях надежного радиоконтакта с навигационными спутниками, но при этом требует ввода начальных данных о широте, долготе, высоте местоположения транспортного средства, а также ориентации относительно меридиана - азимуте, а также не обеспечивает формирование выходных сигналов, полученных на основе только инерциальной информации. Расширенный состав выходных сигналов требуется, в частности, при использовании системы в пилотажно-навигационном комплексе самолетов.
Наиболее близкой к предлагаемой системе по технической сущности является система [2], содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, в которую дополнительно введены блок комплексирования информации и вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, при этом вторая группа входов соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый блока комплексирования информации, а третьей группой из трех входов соединен с входами с семнадцатого по девятнадцатый блока комплексирования информации и подключен к выходам с первого по третий блока вычисления местоположения пользователя, остальные выходы которого с четвертого по шестой связаны с входами с двадцатого по двадцать второй блока комплексирования информации непосредственно, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с второй группой входов из шести вычислителя навигационных параметров и с входами с десятого по пятнадцатый блока комплексирования информации, а выходы с первого по третий непосредственно связаны с входами с седьмого по девятый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, и подключена соответственно к трем выходам корректора угловой скорости и трем выходам корректора кажущегося ускорения, а шестнадцатый вход связан с выходом таймера, при этом выходы блока комплексирования информации с первого по третий соединены с второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, а выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно.
Эта система решает задачу автономного определения местоположения пользователя в трехмерном пространстве с достаточной точностью, если имеет надежный радиоконтакт и достоверную информацию как минимум от четырех спутников выбранного рабочего созвездия, и обеспечивает формирование расширенного состава выходных сигналов, требуемых для пилотирования самолетом, однако в случае отсутствия радиоконтакта с достаточным количеством (не менее четырех) навигационных спутников погрешность определения местоположения с течением времени существенно возрастает, что со временем приводит к нарушению непрерывности навигации.
Задачей настоящего изобретения является повышение точности системы в условиях отсутствия достаточного количества радиовидимых навигационных спутников или при возможном неустойчивом радиоконтакте со спутниковыми навигационными системами; повышение показателя непрерывности навигации при продолжительном отсутствии сигналов GPS; повышение отказоустойчивости системы за счет алгоритмического резервирования некоторых функций блоков обработки спутниковой информации в прототипе.
Для решения поставленной задачи предложена инерциально-спутниковая навигационная система с комбинированным использованием спутниковых данных, содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, а также блок комплексирования информации и вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, при этом вторая группа входов соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый блока комплексирования информации, а третьей группой из трех входов соединен с входами с семнадцатого по девятнадцатый блока комплексирования информации и подключен к выходам с первого по третий блока вычисления местоположения пользователя, остальные выходы которого с четвертого по шестой связаны с входами с двадцатого по двадцать второй блока комплексирования информации непосредственно, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с второй группой входов из шести вычислителя навигационных параметров и с входами с десятого по пятнадцатый блока комплексирования информации, выходы с первого по третий непосредственно связаны с входами с седьмого по девятый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, и подключена соответственно к трем выходам корректора угловой скорости и трем выходам корректора кажущегося ускорения, а шестнадцатый вход связан с выходом таймера, при этом выходы блока комплексирования информации с первого по третий соединены с второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно, в которую дополнительно введен блок обработки спутниковых данных, первой группой входов с первого по второй соединенный с многоканальным радиоприемником и связанный с блоком начальной установки альманаха данных о спутниках второй группой входов с четвертого по пятый, соединенный с таймером через третий вход, при этом группой входов с шестого по восьмой подключенный к выходам с первого по третий блока комплексирования информации, а выходы которого непосредственно связаны с входами с двадцать третьего по двадцать шестой блока комплексирования информации.
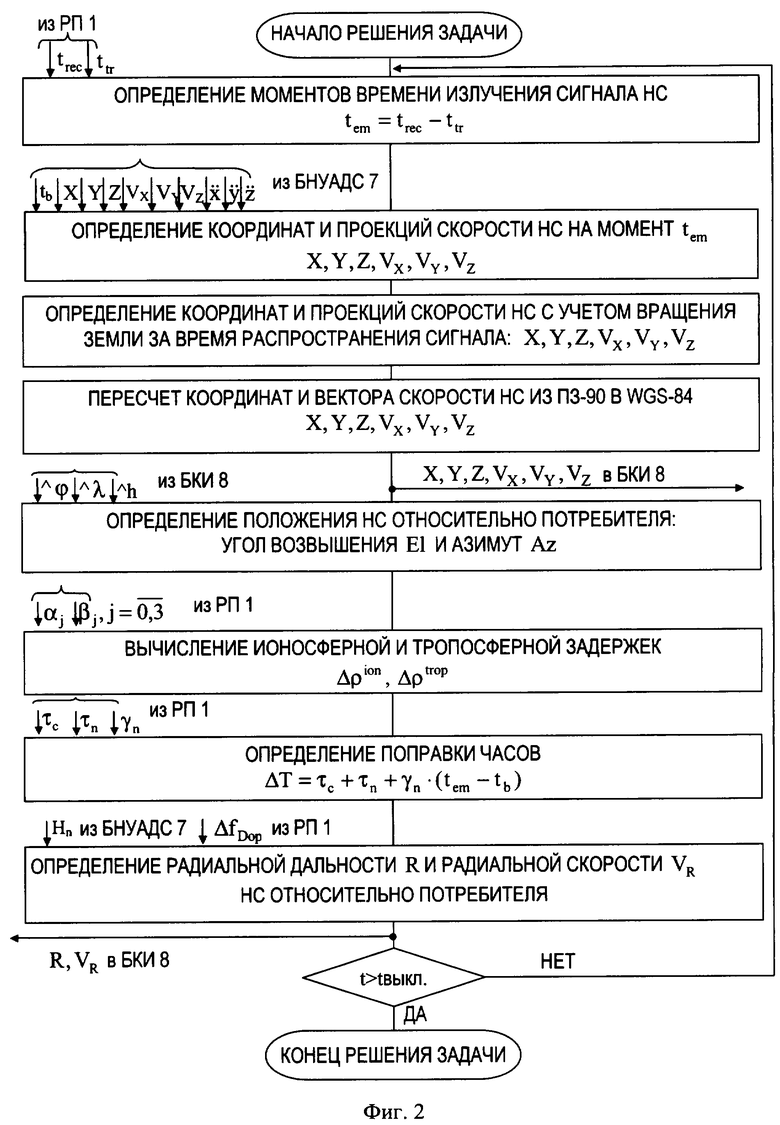
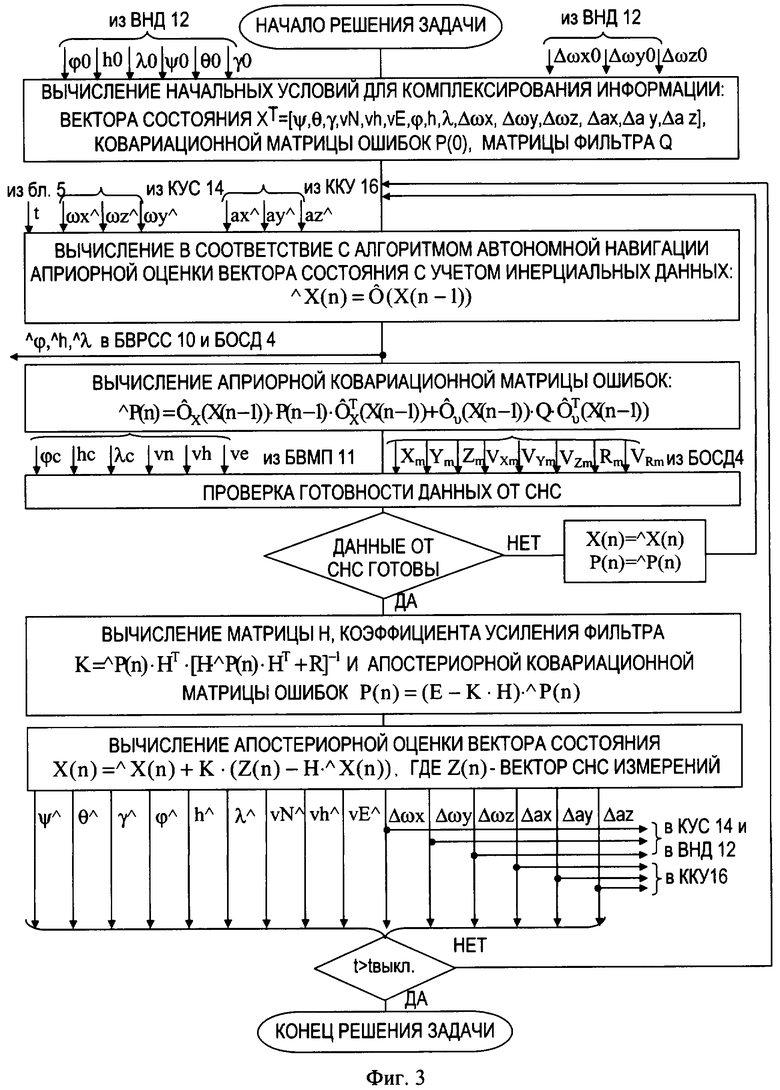
На фиг.1 приведена блок-схема предлагаемой системы; на фиг.2 - блок-схема алгоритма, реализованного в блоке обработки спутниковых данных; на фиг.3 - блок-схема алгоритма, реализованного в блоке комплексирования информации. Остальные блоки предлагаемой системы реализуют алгоритмы прототипа.
В соответствии с фиг.1 система содержит многоканальный радиоприемник 1 (РП), связанный через усилитель 2 (Ус) с антенной 3, а выходами подключенный к первой группе входов блока 4 обработки спутниковых данных (БОСД), синхронизирующий вход которого подключен к таймеру 5, и к первой группе входов вычислителя 6 местоположения спутников (ВМС), вторая группа входов которого соединена с выходами блока 7 начальной установки альманаха данных о спутниках (БНУАДС), связанных также непосредственно с второй группой входов блока 4 обработки спутниковых данных, третья группа входов которого с шестого по восьмой соединена с выходами с первого по третий блока 8 комплексирования информации (БКИ), при этом синхронизирующий вход вычислителя 6 подключен к выходу таймера 5, а его выходы соединены с входами блока 9 выделения радиовидимых спутников (БВРВС). Выходы блока 8 соединены с первой группой входов блока 10 выбора рабочего созвездия спутников (БВРСС), вторая группа входов которого подключена к выходам с первого по третий блока 8 комплексирования информации (БКИ). Выходы блока 10 соединены с входами блока 11 вычисления местоположения пользователя (БВМП), подключенного тремя выходами с первого по третий к третьей группе входов вычислителя 12 начальных данных (ВНД) и к входам с семнадцатого по девятнадцатый блока 8 комплексирования информации, а тремя выходами с четвертого по шестой подключен к входам блока 8 с двадцатого по двадцать второй. Первая группа входов блока 8 комплексирования информации с первого по третий соединена с одноименными входами вычислителя 13 навигационных параметров (ВНП), выходы которого связаны с одноименными выходами системы, и подключена к одноименным выходам корректора 14 угловой скорости (КУС), три первых входа из шести которого соединены с одноименными выходами измерителя 15 проекций абсолютной угловой скорости (ИПАУС) и входами с первого по третий вычислителя 12 начальных данных, а входы с четвертого по шестой корректора 14 соединены соответственно с входами вычислителя 12 начальных данных с седьмого по девятый и подключены соответственно к выходам с тринадцатого по пятнадцатый блока 8 комплексирования информации. Входы с четвертого по шестой блока 8 комплексирования информации соединены с одноименными входами вычислителя 13 навигационных параметров и подключены соответственно к выходам корректора 16 кажущегося ускорения (ККУ), первые три входа которого соединены с четвертым, пятым и шестым входами вычислителя 12 начальных данных и подключены к одноименным выходам измерителя 17 проекций вектора кажущегося ускорения (ИПВКУ), а входы с четвертого по шестой корректора 16 подключены соответственно к выходам с шестнадцатого по восемнадцатый блока 8 комплексирования информации. Входы с двадцать третьего по двадцать шестой блока 8 комплексирования информации соединены с выходами с первого по четвертый блока 4 обработки спутниковых данных. Выходы с первого по третий вычислителя 12 начальных данных соединены с входами с седьмого по девятый блока 8 комплексирования информации, а выходы с четвертого по девятый подключены к входам с седьмого по двенадцатый вычислителя 13 навигационных параметров и к входам с десятого по пятнадцатый блока 8 комплексирования информации, шестнадцатый вход которого связан с выходом таймера 5, при этом выходы с четвертого по двенадцатый непосредственно соединены с выходами системы с десятого по восемнадцатый.
Предлагаемая инерциально-спутниковая навигационная система с комбинированным использованием спутниковых данных (ИСНСКИСД) работает следующим образом.
В соответствии с прототипом исходной информацией для формирования выходных параметров ИСНСКИСД являются сигналы с трех связанных с корпусом самолета и установленных ортогонально друг относительно друга гироскопов, входящих в состав измерителя 15 проекций абсолютной угловой скорости, и сигналы с трех аналогично расположенных акселерометров, входящих в измеритель 17 проекций вектора кажущегося ускорения.
Сигналы с гироскопов, пропорциональные проекциям вектора абсолютной угловой скорости ωx, ωу, ωz, и сигналы с акселерометров, пропорциональные проекциям вектора кажущегося ускорения ax, ay, az, поступают в вычислитель 12 начальных данных и через корректор 14 угловой скорости и корректор 16 кажущегося ускорения в блок 8 комплексирования информации, а также в вычислитель 13 навигационных параметров.
В ВНД поступают также сигналы, пропорциональные широте ϕс, высоте hc и долготе λc самолета из блока 11 вычисления местоположения пользователя приемника спутниковой информации, а также сигналы ошибок измерений проекций угловой скорости Δωx, Δωy, Δωz из БКИ для их запоминания в энергонезависимой памяти блока.
В ВНД осуществляется подготовка начальных данных для БКИ и ВНП, в результате чего формируются сигналы ϕ0, h0, λ0, пропорциональные значениям широты, высоты и долготы местоположения самолета, и сигналы ψ0, θ0, γ0, соответственно пропорциональные начальным значениям угла курса, тангажа и крена самолета.
В КУС и ККУ осуществляется учет ошибок измерений угловой скорости вращения и ошибок измерений кажущегося ускорения.
В ВНП по сигналам, поступающим из корректоров угловой скорости и кажущегося ускорения, с учетом начальных данных, поступивших из ВНД, осуществляется оперативное вычисление навигационных параметров: углов ориентации самолета относительно географического меридиана ψ и плоскости местного горизонта θ, γ; северной vN, вертикальной vh и восточной vE составляющих относительной скорости поступательного движения самолета, а также его географических координат ϕ, h, λ. Указанные параметры в виде соответствующих сигналов выдаются во внешние системы.
Принимаемые антенной 3 сигналы от навигационных спутников через усилитель 2 поступают на многоканальный радиоприемник 1, который после их обработки выдает информацию о спутниках в вычислитель 6 местоположения спутников. Вычислитель 6 по данным об орбитах спутников, выдаваемым блоком 7 информации из радиоприемника 1, и по сигналу таймера 5 вычисляет местоположение спутников, из совокупности которых затем будет выбрана группа, обеспечивающая наилучшую точность навигационного решения.
Такой выбор осуществляется в блоке 10 выбора рабочего созвездия спутников, на входы которого, помимо спутниковой информации из блока 9, поступают из блока 8 сигналы ^ϕ, ^h, ^λ, пропорциональные географическим координатам самолета, полученным на основе инерциальных данных и соответствующим их априорной оценке в фильтре Калмана на момент прихода спутниковых сигналов. С учетом этих сигналов в блоке 10 осуществляется рациональный выбор рабочего созвездия спутников при количестве радиовидимых спутников, большем четырех, повышающий достоверность и точность последующих навигационных решений. Далее информация о спутниках, включенных в рабочее созвездие, поступает в блок 11 вычисления местоположения пользователя, в котором вырабатываются сигналы, пропорциональные координатам самолета ϕc, hc, λc и его скорости vn, vh, ve. Все указанные сигналы поступают в БКИ для коррекции навигационных параметров. Кроме того, сигналы ϕc, hc, λc поступают в ВНД для начальной выставки самолета при включении системы.
При количестве радиовидимых спутников менее четырех сигналы ϕc, hc, λc и vn, vh, ve в блоке 11 не формируются. В этом случае для коррекции вектора состояния в блоке 8 в ИСНСКИСД используются выходные сигналы блока 4 обработки спутниковых данных, которые включают в себя координаты X, Y, Z и проекции скорости VХ, VY, VZ радиовидимых спутников.
Блок 4 обработки спутниковых данных формирует выходные сигналы только в случае наличия одного-трех радиовидимых спутников системы ГЛОНАСС. Таким образом, в ИСНСКИСД реализовано использование спутниковых данных в двух вариантах: по готовому решению, формируемому блоком 11 при достаточном количестве радиовидимых спутников, или по данным от одного-трех спутников системы ГЛОНАСС в случае невозможности получения в блоке 11 готового решения.
На вход блока 4 из многоканального радиоприемника 1, таймера 5 и блока 7 поступают данные в составе, приведенном в таблицах 1-3, а из блока 8 комплексирования информации - сигналы о текущих значениях широты ϕ, высоты h и долготы λ, самолета.
На основе принятых сигналов в блоке 4 реализуется алгоритм вычисления координат и скорости радиовидимых спутников, а также алгоритм вычисления псевдодальности и радиальной скорости самолета относительно навигационных спутников (НС), участвующих в измерениях.
Состав эфемерид спутников ГЛОНАСС


Состав данных для ионосферной коррекции
«Сырые» данные


1. Алгоритм вычисления координат и скорости спутников
1.1. Определение моментов времени излучения сигнала  навигационными спутниками
навигационными спутниками
 m=1...M,
m=1...M,
где trec - время детектирования спутникового сигнала приемником;  - время прохождения сигнала по линии потребитель-спутник (табл.3); М - количество спутников, принимающих участие в измерениях (от одного до трех).
- время прохождения сигнала по линии потребитель-спутник (табл.3); М - количество спутников, принимающих участие в измерениях (от одного до трех).
1.2. Определение координат и проекции скорости в геоцентрической инерциальной системе координат всех НС, принимающих участие в измерениях, Xm, Ym, Zm, VXm, VYm, VZm на моменты времени излучения навигационного сигнала 
Для этого осуществляется прогноз эфемерид с момента времени tb на момент времени путем численного интегрирования дифференциальных уравнений движения спутников, в правых частях которых учитываются ускорения, определяемые гравитационным полем Земли, а также ускорения лунно-солнечных гравитационных возмущений. Уравнения движения каждого навигационного спутника с учетом данных табл.1 интегрируются в прямоугольной геоцентрической системе координат П3-90 методом Рунге-Кутта четвертого порядка до момента времени  и имеют вид [3]:
и имеют вид [3]:

 ,
,
 ,
,
dXm/dt=VXm,
dYm/dt=VYm,
dZm/dt=VZm,
где
 ,
,
μ=398600,44 км3/с2 - константа гравитационного поля Земли;
ae=6378,136 км - экваториальный радиус Земли;
J20=1082625,7×10-9 - коэффициент при второй зональной гармонике разложения геопотенциала в ряд по сферическим функциям;
ω3=0,7292115×10-4 с-1 - угловая скорость вращения Земли.
Начальными условиями для интегрирования приведенной системы уравнений являются координаты и составляющие вектора скорости, указанные в табл.1.
Ускорения от лунно-солнечных гравитационных возмущений  m(tb),
m(tb),  m(tb),
m(tb),  m(tb) на интервале интегрирования ±15 мин являются постоянными величинами.
m(tb) на интервале интегрирования ±15 мин являются постоянными величинами.
1.3. Учет вращения Земли за время распространения сигнала:
где 
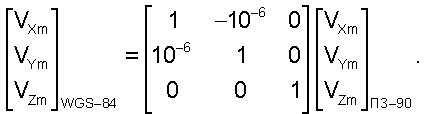
1.4. Пересчет координат и вектора скорости из системы ПЗ-90 в WGS-84 осуществляется по формуле [4]
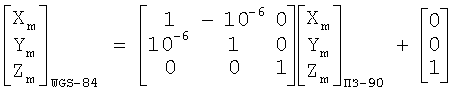 ,
,
2. Алгоритм вычисления псевдодальности и радиальной скорости потребителя относительно НС.
2.1.Определение положения спутников относительно потребителя: угол возвышения Elm и азимут Azm
 ,
,  ,
,
где Aam=arccos(sinϕ·sinϕm+cosϕ·cosϕm·cos(λm-λ)),
 ,
,  ,
,
λ, ϕ, λm, ϕm - геоцентрическая долгота и широта потребителя и спутников соответственно.
Для спутников указанные параметры вычисляются по координатам в системе координат WGS-84, параметры потребителя являются входными данными и поступают из блока 8;  ; c = 299792458 м/с - скорость света;
; c = 299792458 м/с - скорость света; 
 - длина радиус-вектора точки расположения потребителя, координаты которого вычисляются по входным данным ϕ, λ, h - текущим значениям широты, долготы и высоты.
- длина радиус-вектора точки расположения потребителя, координаты которого вычисляются по входным данным ϕ, λ, h - текущим значениям широты, долготы и высоты.
2.2. Вычисление ионосферной задержки по алгоритму, изложенному в [5].
Данные для расчета ионосферной задержки: Azm и Elm - угол азимута и угол возвышения навигационных спутников; ϕ, λ, h - значения широты и долготы и высоты точки расположения потребителя;  - время передачи сигнала; параметры модели ионосферной поправки из табл.2.
- время передачи сигнала; параметры модели ионосферной поправки из табл.2.
Результатом работы алгоритма является величина ионосферной задержки  , сформированная для каждого НС, участвующего в измерениях.
, сформированная для каждого НС, участвующего в измерениях.
2.3. Вычисление тропосферной задержки по модели, изложенной в [6]. Исходными данными алгоритма являются углы Elm, результатом работы алгоритма - величина  .
.
2.4. Определение поправки часов ΔT:
 ,
,
где τc,  ,
,  , tb - параметры из табл.1.
, tb - параметры из табл.1.
2.5. Определение величин псевдодальности Rm и радиальной скорости VRm по результатам измерений: времени распространения сигнала от всех спутников  (с учетом поправки часов спутников ΔT), ионосферной
(с учетом поправки часов спутников ΔT), ионосферной  и тропосферной поправки и доплеровскому смещению частоты
и тропосферной поправки и доплеровскому смещению частоты  :
:
 ,
,
где  - несущая частота (в МГц); Hnm - номер несущей частоты (табл.1).
- несущая частота (в МГц); Hnm - номер несущей частоты (табл.1).
Комплексирование инерциальной и спутниковой информации осуществляется в блоке 8 комплексирования информации, на вход которого поступают сигналы скорректированной угловой скорости вращения из корректора 14 угловой скорости, скорректированного кажущегося ускорения из корректора 16 кажущегося ускорения, а также сигналы из блока 11 вычисления местоположения потребителя о координатах и скорости самолета или из блока 4 о координатах и скорости спутников, псевдодальности и радиальной скорости, а также сигнал секундной метки от таймера 5 для синхронизации инерциальной и спутниковой информации. После включения системы в блок 8 комплексирования информации одноразово поступают также сигналы из ВНД о местоположении самолета ϕ0, h0, λ0, ориентации самолета ψ0, θ0, γ0 и ошибках гироскопов Δωx0, Δωy0, Δωz0. Выходные сигналы блока формируются в соответствии с алгоритмом обобщенного фильтра Калмана, блок-схема которого приведена на фиг.3, и включают в себя скорректированные значения местоположения самолета ϕ^, h^, λ^, скорости самолета vN^, vh^, vE^, ориентации самолета ψ^,θ^, γ^, выдаваемые во внешние системы, а также сигналы, пропорциональные ошибкам измерений гироскопов Δωx, Δωy, Δz, поступающие в корректор 14 для коррекции текущих измерений угловой скорости и в вычислитель 12 для сохранения в энергонезависимой памяти, и ошибкам измерений акселерометров Δax, Δay, Δaz, поступающим в корректор 16 для коррекции текущих измерений кажущегося ускорения. Кроме того, на выходе БКИ формируются спрогнозированные по инерциальным данным сигналы ^ϕ, ^h, ^λ, которые поступают в блок 10 для оптимизации выбора рабочего созвездия спутников и в блок 4 для вычисления ионосферной и тропосферных поправок.
Таким образом, благодаря реализации в ИСНСКИСД двух вариантов использования спутниковых данных: готового решения при наличии достаточного количества радиовидимых спутников и данных по каждому спутнику в отдельности при их малом количестве, достигаются следующие преимущества.
Повышается точность системы в условиях отсутствия достаточного количества радиовидимых навигационных спутников или при возможном неустойчивом радиоконтакте со спутниковыми навигационными системами; повышается показатель непрерывности навигации при продолжительном отсутствии сигналов GPS; повышается отказоустойчивость системы за счет алгоритмического резервирования некоторых функций блоков обработки спутниковой информации. Поскольку обработка сырых данных при втором варианте использования спутниковой информации осуществляется для одного-трех НС, его реализация не ведет к существенному повышению требований к производительности вычислительных средств.
Источники информации
1. Патент РФ №2087867, G01C 23/00, 1993.
2. Патент РФ №2277696, G01C 23/00, G01S 5/14, 2004 - прототип.
3. Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Редакция пятая. Координационный научно-информационный центр. - М. - 2002.
4. Параметры Земли 1990 года (ПЗ-90). Координационный научно-информационный центр. - М. - 1998.
5. ICD-GPS-200 Navstar GPS Space Segment / Navigation User Interfaces. Interface Control Document, 2000.
6. Вавилова Н.Б. и др. Математические модели и алгоритмы обработки измерений спутниковой навигационной системы GPS. - М.: МГУ. - 2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| ОТКАЗОУСТОЙЧИВАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА С ИЗБЫТОЧНЫМ КОЛИЧЕСТВОМ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2014 |
|
RU2570358C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| СУДОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2478187C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
Изобретение относится к области приборостроения и может быть использовано при проектировании комплексных навигационных систем, включающих устройство инерциальной навигации и аппаратуру потребителя спутниковой навигационной системы. Технический результат - повышение точности и отказоустойчивости. Для достижения данного результата инерциально-спутниковая навигационная система содержит многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников. Блок начальной установки альманаха данных о спутниках подключен выходами к второй группе входов вычислителя местоположения спутников. Таймер подключен выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников. При этом повышение отказоустойчивости системы осуществляется за счет резервирования функций блоков обработки спутниковой информации. 3 ил.
Инерциально-спутниковая навигационная система с комбинированным использованием спутниковых данных, содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, а также блок комплексирования информации и вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, при этом вторая группа входов соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый блока комплексирования информации, а третьей группой из трех входов соединен с входами с семнадцатого по девятнадцатый блока комплексирования информации и подключен к выходам с первого по третий блока вычисления местоположения пользователя, остальные выходы которого с четвертого по шестой связаны с входами с двадцатого по двадцать второй блока комплексирования информации непосредственно, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с второй группой входов из шести вычислителей навигационных параметров и с входами с десятого по пятнадцатый блока комплексирования информации, выходы с первого по третий непосредственно связаны с входами с седьмого по девятый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, и подключена соответственно к трем выходам корректора угловой скорости и трем выходам корректора кажущегося ускорения, а шестнадцатый вход связан с выходом таймера, при этом выходы блока комплексирования информации с первого по третий соединены с второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно, отличающаяся тем, что в нее дополнительно введен блок обработки спутниковых данных, первой группой входов с первого по второй соединенный с многоканальным радиоприемником и связанный с блоком начальной установки альманаха данных о спутниках второй группой входов с четвертого по пятый, соединенный с таймером через третий вход, при этом группой входов с шестого по восьмой подключенный к выходам с первого по третий блока комплексирования информации, выходы которого непосредственно связаны с входами с двадцать третьего по двадцать шестой блока комплексирования информации.
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| Глобальная навигационная спутниковая система ГЛОНАСС | |||
| Интерфейсный контрольный документ | |||
| Редакция пятая | |||
| Координационный научно-информационный центр | |||
| - М., 2002, 243 с. | |||

