Изобретение относится к устройствам автоматического управления и может быть использовано при построении систем управления летательными аппаратами.
Для управления движением летательного аппарата используется информация о векторе кажущегося ускорения. В этом случае в неизбыточном варианте необходимо реализовать на летательном аппарате измерительный базис, образуемый системой трех векторов, связанных с осями чувствительности одностепенных акселерометров.
Для повышения точности и надежности работы систем управления летательными аппаратами широко применяют измерительные комплексы с избыточным числом акселерометров, где резервируют как каналы управления в целом, так и измерители - акселерометры. Известно устройство резервирования акселерометров в системе управления летательным аппаратом, содержащее по три акселерометра в каждой из трех осей управления (всего девять акселерометров), выходы которых соединены с логическим коммутатором, выходы которого подключены к вычислительному устройству (А.А.Епифанов. Надежность систем управления, М., Машиностроение, 1975г.). В коммутаторе производится сравнение сигнала на выходе каждого акселерометра с выходными сигналами двух других, расположенных по этой же оси управления (в одном канале) и путем сравнения определяется неисправный (отказавший) акселерометр. Однако, такое устройство резервирования акселерометров в системе управления летательным аппаратом позволяет сохранять работоспособность измерительного комплекса лишь при отказе только одного акселерометра из девяти, что ведет к увеличению массогабаритных показателей таких измерительных комплексов.
Наиболее близким техническим решением к предлагаемому изобретению является устройство резервирования акселерометров в системе управления летательным аппаратом, содержащее восемь акселерометров, два сумматора, четыре коммутатора, шесть компараторов, регистр и дешифратор [Авторское свидетельство N 489078 Кл. G 05 B 15/02, 1975). Ориентация осей чувствительности акселерометров и алгоритмы, по которым работает устройство резервирования акселерометров в системе управления, обеспечивает работоспособность измерительного комплекса, состоящего уже из восьми акселерометров, в случае отказа одного или двух акселерометров из восьми размещаемых на борту летательного аппарата. Однако размещение акселерометров на борту летательного аппарата увеличивает массогабаритные показатели измерительного комплекса системы управления.
Цель изобретения - снижение массогабаритных показателей измерительного комплекса системы управления летательного аппарата.
Указанная цель достигается тем, что в устройство резервирования акселерометров в системе управления летательным аппаратом, содержащего семь акселерометров, два сумматора, шесть компараторов и коммутатор, три выхода которого являются выходами устройства, а управляющие входы подключены к выходной шине дешифратора, введены четыре сумматора, причем выходы первых трех акселерометров соединены с информационными входами коммутатора, четвертый выход которого соединен с первыми входами первого, четвертого и шестого сумматора, пятый выход коммутатора соединен с первыми входами второго и пятого сумматора и вторым входом четвертого сумматора, шестой выход коммутатора соединен со вторыми входами пятого и шестого сумматора и первым входом третьего сумматора, кроме того, выход четвертого акселерометра соединен со вторым входом второго и третьим входом шестого сумматоров, выход пятого акселерометра соединен со вторым входом третьего и третьим входом четвертого сумматоров, выход шестого акселерометра соединен со вторым входом первого и третьим входом пятого сумматоров, выход седьмого акселерометра соединен с третьими входами первого, второго и третьего сумматоров, причем выход каждого из сумматоров подключен к соответствующему информационному входу коммутатора, а также к первым входам соответствующих компараторов, ко второму входу которых подключена входная нулевая шина, выходы компараторов соединены со входами дешифратора.
Новизной предлагаемого устройства является введение дополнительных четырех сумматоров, хотя они и являются известными блоками (А.Г.Алексеенко и др. Применение прецизионных аналоговых микросхем. - М. Радио и связь, 1985), однако в предлагаемой взаимосвязи с другими блоками устройства, описанными выше, это приводит к тому, что сокращено количество акселерометров в предлагаемом устройстве до семи в отличие от прототипа, где используются - восемь, что является существенным отличием.
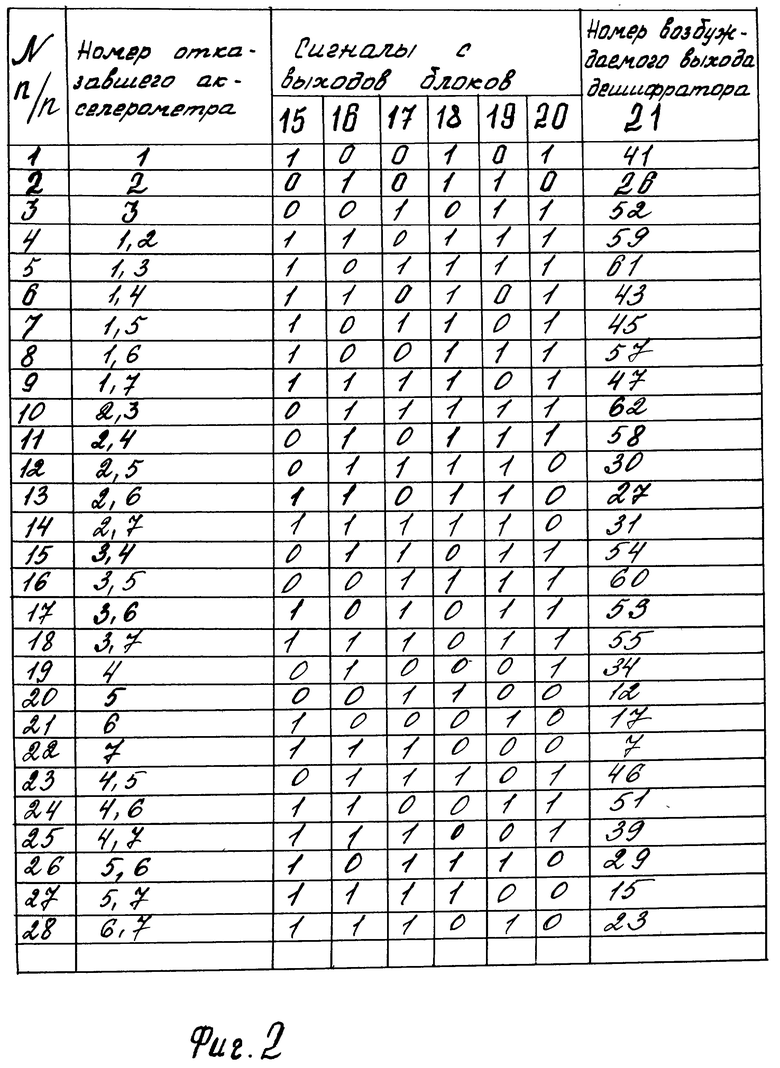
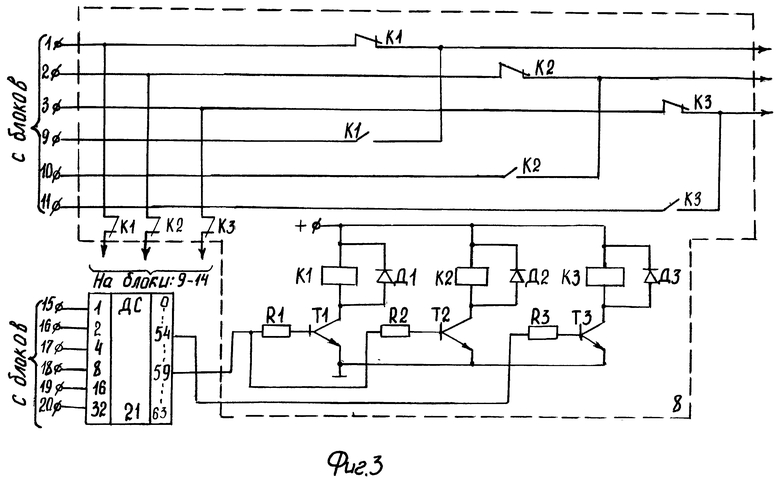
На фиг. 1 изображена структурная схема устройства резервирования акселерометров в системе управления летательного аппарата; на фиг. 2 - таблица кодов отказов акселерометров; на фиг. 3 - функциональная схема устройства.
На фиг. 1 показана структурная схема предлагаемого устройства резервирования акселерометров в системе управления летательного аппарата, содержащая семь акселерометров 1-7, коммутатор 8, шесть сумматоров 9-14, шесть компараторов 15-20 и дешифратор 21, выходная шина которого подключена к управляющим входам коммутатора 8, три выхода которого являются выходами устройства, причем выходы акселерометров 1-3 соединены со входами коммутатора 8, четвертый выход которого соединен с первыми входами сумматоров 9, 12 и 14, пятый выход коммутатора 8 соединен с первыми входами сумматоров 10, 13 и вторым входом сумматора 12, шестой выход коммутатора 8 соединен со вторыми входами сумматоров 13, 14 и первым входом сумматора 11, кроме того, выход акселерометра 4 соединен со вторым входом сумматора 10 и третьим входом сумматора 14, выход акселерометра 5 соединен со вторым входом сумматора 11 и третьим входом сумматора 12, выход акселерометра 6 соединен со вторым входом сумматора 9 и третьим входом сумматора 13, выход акселерометра 7 соединен с третьими входами сумматоров 9, 10 и 11, причем выход каждого из сумматоров 9-14 подключен к соответствующему информационному входу коммутатора 8, а также к первым входам соответствующих компараторов 15-20, ко второму входу которых подключена входная нулевая шина, выходы компараторов 15-20 соединены со входами дешифратора 21.
Оси чувствительности акселерометров 1-3 образуют ортогональную систему координат - OXYZ с началом в точке O. Ось чувствительности акселерометра 4 - OS1, ориентирована так, что лежит в плоскости, образуемой осями чувствительности акселерометров 1 и 2, и составляет с ними угол β = 45o. Ось чувствительности акселерометра 5 - OS2, ориентирована так, что лежит в плоскости, образуемой осями чувствительности акселерометров 2 и 3, и составляет с ними угол - β = 45o. Ось чувствительности акселерометра 6 - OS3 ориентирована так, что лежит в плоскости, образуемой осями чувствительности акселерометров 1 и 3, и составляет с ними угол - β = 45o. Ось чувствительности акселерометра 6 - OS3 ориентирована так, что лежит в плоскости, образуемой осями чувствительности акселерометров 1 и 3, и составляет с ними угол - β = 45o. Ось чувствительности акселерометра 7 - OS составляет с осями чувствительности акселерометров 1, 2 и 3 одинаковый угол α. Согласно М.Я. Выгодский. Справочник по высшей математике. Изд. шестое. Гос. издательство физико-математической литературы. Москва. 1963 г.
Очевидно, что для управления летательным аппаратом с устройства резервирования акселерометров необходимо выдавать в систему управления движением летательного аппарата достоверную информацию о величине линейного кажущегося ускорения - W или кажущейся скорости - V (в случае интегрирующих акселерометров 1-7). Эту информацию всегда можно получить с акселерометров 1-3 (фиг. 1 и фиг. 3), поэтому в исходном состоянии устройства резервирования выходы этих акселерометров 1-3 подключены коммутатором 8 к выходам устройства и соответствующим входам сумматоров 9-14. На входную нулевую шину подан нулевой сигнал - "0". Определим, какие функции выполняют сумматоры 9-14. Для этого согласно предложенной ориентации осей чувствительности акселерометров 1-7 можно записать: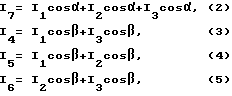
где: I1, I2, I3, I4, I5, I6, I7 - выходные сигналы акселерометров 1-7.
Из уравнений (3)-(5) выразим: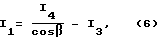
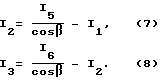
Полученные уравнения (6)-(8) последовательно подставляем в уравнение (2), получим:
где: I9, I10, I11, I12, I13, I14 - выходные сигналы сумматоров 9-14; cos β и cos α согласно (1) - константы.
Во время полета летательного аппарата и в случае, если показания всех акселерометров 1-7 правильны (нет неисправностей или отказов), то согласно предложенной ориентации осей чувствительности акселерометров 1-7 и алгоритмов работы сумматоров 9-14 с их выходов получим:
I9 = I10 = I11 = I12 = I13 = I14 = 0
В этом случае на выходах компараторов 15-20 образуются логические нули. Дешифратор 21 не является полным и нулевая комбинация - 000000, поступающая на его вход относится к неиспользуемой. На фиг. 2 представлена таблица возможных комбинаций. В этом случае измерение величины W (или V) движения летательного аппарата будет производиться за счет сигналов с акселерометров 1-3, коммутируемых коммутатором 8 на выход устройства.
Под неисправностью (отказом) акселерометра будем понимать ту величину его погрешности, которая приводит к появлению выходного сигнала сумматора (сумматоров), отличного от нулевого (идеальный случай, и шумы акселерометров поэтому будут восприниматься устройством, как его погрешность. Для защиты от шумов акселерометров 1-7 на компараторах 15-20 сравнение сигналов с сумматоров 9-14 производить можно не с нулем, а с каким-то пороговым значением сигнала). По фиг. 2 видно, что восемнадцать комбинаций (п.1-18) входных сигналов дешифратора 21 являются используемыми, причем все коды отличаются друг от друга, т.е. позволяют обнаруживать номера отказавших акселерометров 1-7, вплоть до двух отказов из семи размещаемых на борту летательного аппарата. Таблица по фиг. 2 составлена с учетом допущения, что вероятность появления погрешностей у двух акселерометров, входящих в одно и то же выражение по (12)-(17) и не приводящее к нарушению этого выражения, практически равна нулю.
Работает устройство следующим образом. В случае исправной работы акселерометров 1-7 управление летательным аппаратом (определение W или V) производится по трем акселерометрам 1-3, оси чувствительности которых образуют систему координат OXYZ. При отказах акселерометров 1-7 состояние компараторов 15-20 (фиг. 2) будет меняться. Пусть состояние "0" i-го компаратора соответствует нулевому сигналу с выхода i-го сумматора, а состояние "1" - в противном случае. Рассмотрим сразу случай отказа двух акселерометров (так как случай отказа одного акселерометра - намного проще). Здесь возможны три варианта.
Первый вариант. Отказали два акселерометра из группы 1-3. Это случай п. 4, 5 и 10 фиг. 2. В этом случае фиксируются единичные сигналы только в тех разрядах кода, где используются сигналы отказавших акселерометров из группы 1-3. Во всех разрядах, в которых используются сигналы исправных акселерометров, формируются компараторами 15-20 логические нули (пять разрядов - в состоянии "1" и один разряд - в состоянии "0"). На фиг. 3 изображена часть функциональной схемы коммутатора 8 и дешифратора 21 именно для случая отказов акселерометров 1 и 2, по коду 110111 (младший разряд слева) возбуждается выход 59 у дешифратора 21, благодаря чему срабатывают реле K1 и К2, контактами которых отключаются отказавшие акселерометры 1 и 2 и к выходу устройства (вместо акселерометров 1 и 2) подключаются выходы сумматоров 9 и 10, которые будут вырабатывать сигналы:
- в канал вместо отключенного акселерометра 1
- в канал вместо отключенного акселерометра 2
что соответствует достоверной информации.
Второй вариант. Отказали: один акселерометр из группы 1-3 и один из 4-7. Это случай п.6, 7, 8, 9, 11-18 фиг. 2. Для случая отказа акселерометров 3 и 4 изображена функциональная схема устройства фиг. 3, где по коду 011011 возбуждается выход 54 у дешифратора 21, благодаря чему сработает реле К3, контактами которого отключается акселерометр 3 и к выходу устройства по этому каналу подключается выход сумматора 11, который вырабатывает сигнал, равный:
что соответствует достоверной информации.
Третий вариант. Отказали два акселерометра из группы 4-7. Это случай п. 23-28 фиг. 2. В этом случае коды, вырабатываемые компараторами 15-20, дешифратором 21 неиспользуются. Поступление достоверной информации в систему управления летательного аппарата производится от акселерометров 1-3.
В качестве компараторов 15-20 могут применяться аналогово-цифровые преобразователи по А.Г.Алексеенко и др. Применение прецизионных аналоговых микросхем. - М. Радио и связь, 1985, с.150-160.
За базовый объект принят прототип. В отличие от базового объекта, где в измерительном комплексе системы управления летательного аппарата используются восемь акселерометров, предлагаемое устройство резервирования акселерометров содержит уже семь акселерометров, что ведет к снижению массогабаритных показателей измерительного комплекса системы управления и к тому же упрощает его. Предлагаемое устройство так же, как и прототип, сохраняет работоспособность системе управления ракеты при отказе в измерительном комплексе двух любых акселерометров. К тому же снижение количества акселерометров ведет также к увеличению надежности работы измерительного комплекса летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕЗЕРВИРОВАНИЯ АКСЕЛЕРОМЕТРОВ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2050713C1 |
| УСТРОЙСТВО ДЛЯ РЕКОНФИГУРАЦИИ МНОГОМАШИННОГО ВЫЧИСЛИТЕЛЬНОГО КОМПЛЕКСА | 1991 |
|
RU2022342C1 |
| УСТРОЙСТВО СВЕРТКИ ПО ПЕРЕМЕННОМУ МОДУЛЮ | 1991 |
|
RU2051408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ | 1993 |
|
RU2046349C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕЧЕТКОЙ ИНФОРМАЦИИ | 1998 |
|
RU2158441C2 |
| Устройство для измерения амплитуды механических колебаний | 1988 |
|
SU1613876A2 |
| РЕТРАНСЛЯТОР | 1991 |
|
RU2010431C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЧЕТЫРЕХРАЗРЯДНОГО ДВОИЧНОГО КОДА В ДВОИЧНО-ДЕСЯТИЧНЫЙ КОД | 1993 |
|
RU2040115C1 |
| УНИВЕРСАЛЬНЫЙ ПАРАЛЛЕЛЬНЫЙ СЧЕТЧИК ПО МОДУЛЮ M - ДЕШИФРАТОР КОЛИЧЕСТВА ЕДИНИЦ В N-РАЗРЯДНОМ ДВОИЧНОМ КОДЕ | 1991 |
|
RU2020744C1 |
| Устройство контроля | 1985 |
|
SU1291931A1 |
Изобретение относится к системам управления современных летательных аппаратов. Технический результат заключается в снижении массогабаритных показателей измерительного комплекса системы управления летательного аппарата, который достигается за счет снижения количества применяемых акселерометров с восьми до семи. В устройстве применена своеобразная ориентация осей чувствительности семи акселерометров, соединение выходов акселерометров с коммутатором, а через него - со входами сумматоров и выходами устройства. Кроме того, выходы акселерометров подключены ко входам сумматоров, выходы которых соединены с коммутатором и соответствующими компараторами, ко входам которых подключена входная нулевая шина. Выходы компараторов соединены с дешифратором, выходная шина которого соединена с коммутатором. 3 ил.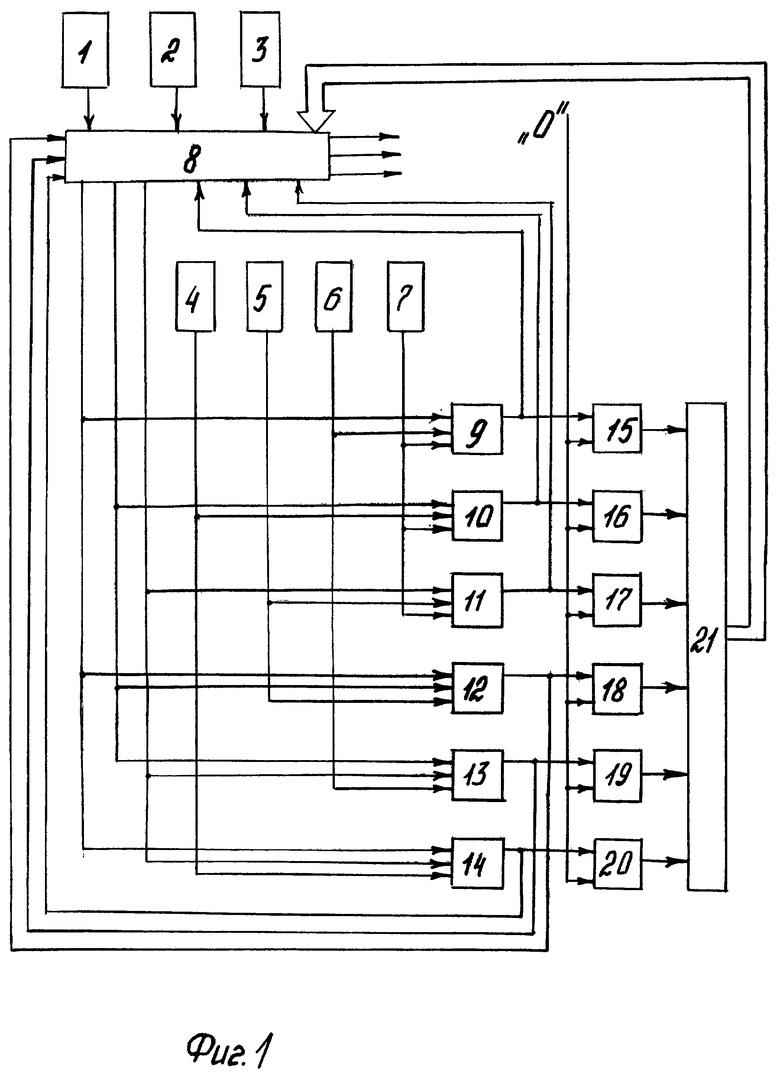
Устройство резервирования акселерометров в системе управления летательным аппаратом, содержащее семь акселерометров, два сумматора, шесть компараторов и коммутатор, три выхода которого являются выходами устройства, а управляющие входы подключены к выходной шине дешифратора, отличающееся тем, что в него введены четыре сумматора, причем выходы первых трех акселерометров соединены с информационными входами коммутатора, четвертый выход которого соединен с первыми входами первого, четвертого и шестого сумматоров, пятый выход коммутатора соединен с первыми входами второго и пятого сумматоров и вторым входом четвертого сумматора, шестой выход коммутатора соединен со вторыми входами пятого и шестого сумматоров и первым входом третьего сумматора, кроме того, выход четвертого акселерометра соединен со вторым входом второго и третьим входом шестого сумматоров, выход пятого акселерометра соединен со вторым входом третьего и третьим входом четвертого сумматоров, выход шестого акселерометра соединен со вторым входом первого и третьим входом пятого сумматоров, выход седьмого акселерометра соединен с третьими входами первого, второго и третьего сумматоров, причем выход каждого из сумматоров подключен к соответствующему информационному входу коммутатора, а также к первым входам соответствующих компараторов, ко вторым входам которых подключена входная нулевая шина, выходы компараторов соединены со входами дешифратора.
| Система управления пространственным положением объекта | 1974 |
|
SU489078A1 |
| RU 94001551 A1, 20.11.95 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЕКЦИЙ ПАРАМЕТРОВ ИНЕРЦИАЛЬНОГО ДВИЖЕНИЯ НА ОСИ, СВЯЗАННОЙ С ОБЪЕКТОМ СИСТЕМЫ КООРДИНАТ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2061967C1 |
| US 3886418 A, 27.05.75 | |||
| US 4115848 A, 19.09.78. | |||

