Изобретение относится к радиолокационной технике и предназначено для радиолокационного автоматического обнаружения и трассового сопровождения кругового обзора воздушных, наземных и надводных целей, локальной радиосвязи и ближней радионавигации объектов (субъектов)
Известен способ обнаружения воздушных целей путем совместного использования станции разведки и целеуказания, кругового обзора станции сопровождения целей и наведения, 1С91 зенитного ракетного комплекса 2К12 (КУБ) (см. Противовоздушная и противоракетная оборона том IX, Энциклопедия XXI. М.: Издательский дом "Оружие и технологии", 2004 г, стр.441-444).
Однако самоходная установка разведки и наведения обеспечивает задачу обнаружения, автоматического сопровождения одиночной цели и наведения двумя раздельными станциями.
Известен способ радиолокационного обнаружения и измерения координат объектов (см. Радиоэлектроника за рубежом, 1980 г, №17, стр.23), предусматривающий излучение обзорной станцией S-диапазона (например, РЛС RAT-31S, λ=7-15 см, применяемая в системах управления воздушным движением и противовоздушной обороной - ПВО) определенной длительности и с заданным периодом повторения Тп последовательности зондирующих радиоимпульсов, прием отраженных от цели радиоимпульсов, осуществление межпериодного накопления отраженных радиоимпульсов, обнаружение сигналов цели и сравнение с заданным порогом амплитуды накопленных радиоимпульсов.
Однако концентрация энергии при просмотре каждого направления недостаточна для обнаружения малозаметных объектов, обладающих малой эффективной поверхностью рассеивания (ЭПР), поскольку за короткий период (единицы секунд) требуется осмотреть всю зону кругового обзора пространства.
Известен способ радиолокационного обнаружения и измерения координат объектов (см. патент RU №2211458, МПК G 01 S 13/00, от 27.08.03), основанный на обнаружении объектов при круговом обзоре пространства (например, длинноволновая РЛС), измерение их координат с передачей данных сопровождения на коротковолновую РЛС и после обнаружения объектов с более высокой точностью измерение угловых координат.
Недостатком этого изобретения является наличие двух станций РЛС короткого и длинного диапазонов излучения электромагнитных волн.
Известен способ определения координат источника излучения (см. Теоретические основы радиолокации. 1970, под ред. Я.Д.Ширман, М.: Советское радио, стр.495-497), основанный на приеме радиоизлучений в не менее чем двух пунктах с известными координатами, определении направления на источник радиоизлучения, за счет чего вычисляют дальность до источника.
Однако наличие нескольких пунктов приема радиосигналов, что значительно усложняет систему, снижает ее надежность и мобильность.
Известен способ обнаружения воздушных целей (см. С.И.Петухов. История создания и развития вооружения и военной техники ПВО Сухопутных войск России. 1998, часть 1, стр.216), имеющий в своем составе станцию обнаружения целей кругового обзора и станцию сопровождения цели, азимутальное направления линии визирования антенны которой совпадают с азимутальным направлением пусковой установки.
Известный способ передачи необходимой информации о воздушной цели на истребитель, несущий средства поражения воздушных целей, определяя факт его нахождения в диаграмме направленности антенны (ДНА), реализован во вторичном адресном радиолокаторе - станции передачи команд "Радуга - СПК-75П" (см. Авиационные радиолокационные системы и оборудование. Москва, ООО "Военный Парад", калалог, т.5, часть 7, стр.331-333). Данную информацию "Радуга - СПК-75П" получает от трех командных пунктов (КП) по телекодовой линии связи (ТКС). Истребитель по ответному каналу связи передает "квитанцию" о получении данных о воздушной цели на "Радугу - СПК-75 П", которая определяет полярные координаты истребителя.
"Радуга - СПК-75 П" не выполняет функции обнаружения и трассового сопровождения воздушных и тем более иных целей, а лишь транслирует их на истребитель, т.е. исполняет роль активного посредника в линии телекодовой связи, а также активного посредника при определении полярных координат истребителя.
Известен способ обнаружения, опознавания государственной принадлежности и измерения координат воздушных целей и выдачи целеуказания на автоматическую систему управления (АСУ), реализован в радиолокационном и связном комплексе (АСРК) "Дельта (см. Оружие России. Москва, ООО "Военный парад", каталог, т.5, стр.218-223, 1996-1997 г.г.).
Комплекс состоит из двух каналов, каждый из которых содержит радиолокационный и связной пункт (АСРП), и поста обработки данных и управления (ПОДУ).
Каждый ПОДУ отстоит от соответствующего АСРП примерно на 200 км. Сигналы управления поступают от ПОДУ в АСРП через встроенный в него тропосферный канал связи. Соответственно, из АСРП данные об обнаруженных и сопровождаемых целях поступают в ПОДУ. Связь ПОДУ с АСРП осуществляют в узком пространственном секторе, хотя расположение АСРП относительно ПОДУ не регламентировано, кроме предела удаленности от ПОДУ. В данном способе присутствуют функции обнаружения и трассового сопровождения воздушных целей, но функции связи и обнаружения и трассового сопровождения не объединены. Кроме того, отсутствуют функции обнаружения и трассового сопровождения надводных и наземных целей, а размер сектора связи очень далек от кругового.
Наиболее близким по технической сущности и достигаемому результату является способ радиолокационного автоматического обнаружения воздушных целей, локальной радиосвязи и ближней радионавигации объектов, реализованный в подвижном пункте разведки и управления (ППРУ) 9С80М1 (см. Противовоздушная и противоракетная оборона, 2004 г., Энциклопедия XXI век, т.IX, издательский дом "Оружие и технологии", стр.548-549), предусматривающий излучение определенной длительности с заданным периодом повторения Тп последовательности зондирующих радиоимпульсов, и в течение каждого отрезка времени от спада текущего радиоимпульса до фронта последующего радиоимпульса принимают отраженные радиоимпульсы, производят межпериодное накопление отраженных радиоимпульсов, обнаруживают сигнал цели, сравнивая с заданным порогом амплитуду накопленных импульсов, а также обеспечивая связь и автоматизированное управление боевыми средствами с помощью аппаратуры передачи данных типа "Аккорд" с обнаруженными воздушными объектами на месте и в движении.
В состав ППРУ входят:
- радиолокатор с аппаратурой госопознавания воздушных целей;
- управляющий аппаратно-программный комплекс;
- многоканальная аппаратура съема и передачи данных;
- средства внешней и внутренней связи;
- система навигации и топопривязки.
Однако ППРУ реализует автономно разрозненные системы связи и навигации при чрезмерно большом арсенале используемых технических средств, не обеспечивая трассового сопровождения цели.
Техническим результатом изобретения является совместное обнаружение и трассовое сопровождение воздушных, наземных и надводных целей, передача и приема с высокой помехозащищенностью объектам (субъектам) с нескольких позиций посредством излучения сигналов линии связи с временным разделением доступа (TDMA) данных о точных в едином времени их относительных координат и относительных координат геодезических реперов, обеспечивающих на объекте (субъекте) выполнение привязки к геодезическим реперам с определением своих координат, а также с возможностью передачи и приема абонентами речевого сигнала (сообщения) и другой необходимой информации.
Технический результат изобретения достигается тем, что в способе объединенных радиолокационного автоматического обнаружения и трассового сопровождения кругового обзора воздушных, наземных, надводных целей, локальной радиосвязи и ближней радионавигации объектов и субъектов излучают из нескольких разнесенных позиций определенной длительности с заданным периодом повторения Тп последовательность радиоимпульсов, в каждом периоде следования излучают или принимают от объектов (субъектов) поочередно группы радиоимпульсов: синхронизации, сигналов управления, кода защиты от ошибок, передачи информации, проверочных кодов, с выделением паузы на время защитного интервала и в течение каждого отрезка времени от спада текущего радиоимпульса до фронта последующего радиоимпульса принимают отраженные от цели, поверхности земли или воды и местных предметов радиоимпульсы, производят межпериодное накопление отраженных радиоимпульсов, обнаруживают сигнал цели, сравнивая с заданным порогом амплитуду накопленных импульсов. После приема отраженного последнего в последовательности зондирующего импульса (циклически), через 5-6 циклов кругового обзора излучают высокостабильные по длительности и периоду следования два монохроматических радиоимпульса с удвоенным периодом следования (2ТП) длительностью 6-10 мкс и 6-8 радиоимпульсов длительностью 2-3 мкс, равноудаленных относительно друг друга на 100-70 мкс, которые принимают после их ретрансляции.
Поскольку мощность передатчика РЛС, как правило, намного больше, чем в обычных системах связи, а антенны РЛС обладают гораздо более высоким коэффициентом усиления и на передачу, и на прием, а также более высокой пространственной направленностью, трудно представить, что могут найтись помехопостановщики, способные создать помехи, плотность которых соизмерима с плотностью мощности излучаемой РЛС.
Технический результат получения высокой помехозащищенности системы ближней навигации достигается за счет того, что с трех, разнесенных относительно недалеко, позиций передают данные взаимодействующим объектам и субъектам, в том числе об их относительных координатах.
Информация поступает по цифровой мобильной линии связи TDMA (множественный доступ с временным разделением каналов), например DECT (цифровая европейская система беспроводной связи), с временным дуплексным разделением режимов передачи и приема (TDD), обеспечивающей секретность связи и защиту от несанкционированного доступа, ДТК-900 и т.п.
При этом радиостанция абонента работает только на прием.
К тому же помехопостановщик не в состоянии определить, в какой отрезок текущего времени будут передаваться навигационные данные с каждой позиции на данный объект (или субъекту).
Технический результат обеспечения высокой точности определения координат на каждой из трех позиций обусловлен тем, что излучение и прием сигналов с этих позиций производят в известном едином текущем времени и при передаче данных на объект (субъекту) обязательно передается величина момента текущего времени, на который были получены координаты данного объекта (или субъекта). Кроме того, поскольку стабильность генератора на объекте или приемопередатчике связи у субъекта и некоторых объектов не может быть столь высокой, нежели у задающего генератора РЛС, на каждой из позиций, через определенные отрезки времени вычисляют ошибку и однозначную величину задержки при распространении сигнала от каждой из позиций до объекта (субъекта) и вводят необходимую поправку, что обеспечит высокую точность в определении относительных координат объекта (субъекта).
Технический результат с облегчением массы аппаратуры, ее компактности и снижения электропотребления обусловлен тем, что, с одной стороны, отсутствует необходимость установки трех вместо одного передатчиков и приемных систем (передатчики и приемники РЛС, средств связи и навигационного комплекса), с другой, нет смысла держать аппаратуру РЛС, средств связи и навигационного комплекса все время под током. В-третьих, естественно ожидать, что вследствие выполнения аппаратурой РЛС функций связи и точной навигации частично или полностью занимаемый аппаратурой объем сократится.
Сравнение предлагаемого решения с известными техническими решениями показывает, что оно обладает новой совокупностью существенных признаков, которые позволяют реализовать поставленную цель.
Сущность предлагаемого решения будет понятна из следующего описания и приложенного к нему графического материала.
Представим РЛС кругового обзора, антенна которой вращается с некоторой скоростью и излучает посылки радиоимпульсов с заданным периодом.
Для ясности примем период повторения (Тп) импульсов равным Тп=800 мкс (Fп=1,25 кГц).
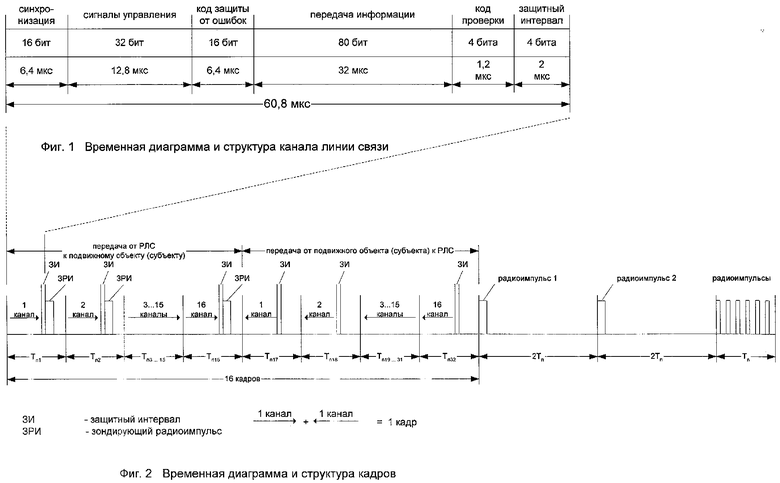
В неком первом периоде повторения, начиная со времени t0=0, РЛС излучает поочередно группы радиоимпульсов: 16 радиоимпульсов синхронизации, 32-х битовый сигнал управления, 16-ти битовый код защиты от ошибок, 80-ти битовый модулированный по частоте или фазе сигнал передачи информации или речи и 4 бита проверки.
Длительность битового радиоимпульса составляет 0,4 мкс, кроме битов проверки, длительность которых составляет 0,3 мкс. После этого следует пауза длительностью 2 мкс, представляющая защитный интервал. Приведенный порядок излучения вышеперечисленных сигналов носит демонстрационный характер и позаимствован с существующего стандарта цифровой подвижной радиосвязи ДЕСТ (цифровая Европейская беспроводная связь (см. Ю.А.Громаков. "Стандарты и системы подвижной связи". Мобильные Теле Системы, Эко-Трендз, Москва, 1997 г., стр.207-211)). Этот стандарт адаптирован к данному способу как один из примеров.
Перечисленные сигналы подвижной связи представлены на фиг.1 и составляют единичный кадр общей длительностью 60,8 мкс. Информационный сигнал может иметь модуляцию в виде гауссовской манипуляции минимальным частотным сдвигом.
Набор единичных кадров составляет каналы связи на передачу (16 каналов) и каналы связи на прием (16 каналов), что показано на фиг.2. Таким образом, линия связи обеспечивает скорость 41 кБит/с передачи информации и 16,4 кБит/с передачи сигналов управления. Общая скорость передачи пакета - 74 кБит/с.
После защитного интервала излучают радиолокационный зондирующий радиоимпульс с линейной частотной модуляцией (ЛЧМ) несущей.
Может быть использован зондирующий радиоимпульс с фазокодовой манипуляцией несущей, например модулированный 63-х разрядной М-последовательностью.
Радиоимпульс с ЛЧМ несущей должен иметь коэффициент сжатия не менее 50...60, во-первых, из-за необходимости обеспечения дальности обнаружения, во-вторых, с целью существенного превышения уровня отраженного от целей сигналов по сравнению с отраженными от целей и поверхности предшествующими излученными сигналами линии связи.
Выберем для примера длительность радиоимпульса, равной 24 мкс, а коэффициент сжатия, равный 60. Это означает, что длительность сжатого радиоимпульса составляет 0,4 мкс, а его амплитуда в 60 раз превзойдет амплитуду несжатого импульса той же длительности.
Из фиг.1 видно, что зондирующий радиоимпульс отстоит от t0, t0+Тп, ... t0+NTп на 60,8 мкс.
Отраженные от целей и/или подстилающей поверхности радиоимпульсы принимают приемником, в котором осуществляют согласованную фильтрацию, например путем стробирования и последующей узкополосной фильтрации, согласованной со временем накопления. В силу априорной неизвестности доплеровского смещения несущей частоты, обусловленного движением цели, должен быть ряд узкополосных фильтров, перекрывающих диапазон частот относительно несущей от 0 до Fдmax - максимальный доплеровский сдвиг, соответствующий максимальной скорости цели. Амплитуду сигналов в каждом доплеровском узкополосном фильтре сравнивают с заданным порогом. Превышение порога означает наличие сигнала цели. Следовательно, цель обнаружена и начинается ее трассовое сопровождение по данным (углы, дальность и скорость сближения), поступающим от цикла к циклу обзора.
Поскольку в настоящее время узкополосная фильтрация реализуется применением быстрого преобразования Фурье (БПФ), целесообразно, чтобы количество накапливаемых радиоимпульсов равнялось 2n (в нашем примере - 32).
Поскольку в течение каждого периода повторения могут излучаться сигналы вышеописанного кадра системы связи, то возможно осуществить одночастотную дуплексную связь путем передачи в первых 16-ти периодах следования информации шестнадцатью каналами связи 16-ти абонентам и приема информации от абонентов по соответствующим 16-ти каналам в течение остальных шестнадцати периодов следования. Это означает, что в течение последних 16-ти периодов повторения излучают только зондирующие радиоимпульсы.
Поскольку излучение сигналов связи и зондирующих импульсов происходит в течение одного и того же периода, возникает необходимость решения существенного ослабления взаимного влияния отраженных от целей и подстилающей поверхности. Это достигается во-первых, порядком излучения сигналов, во-вторых, существенно большей энергетикой зондирующего импульса (в 50...60 раз по отношению к каждому излучаемому импульсу линии связи, которые не накапливаются от периода к периоду повторения), в-третьих, возможно излучать сигналы связи и зондирующие импульсы на различных несущих частотах.
В свою очередь, видно, что вследствие того что уровень затухания сигнала при распространении для радиолокационных задач пропорционален четвертой степени от дальности, связных задач - второй степени от дальности, ясно, что максимальная дальность связи будет намного больше, чем дальность обнаружения целей. Это значит что, у абонентов чувствительность приемников и мощность передающих устройств намного снижена, что обеспечивает скрытность и устойчивость к помехам линии связи.
Вследствие вышеизложенного могут возникнуть два варианта ситуаций состояния функционирования связного и радиолокационного каналов, при этом полагаем, что дальность до объекта (субъекта) достаточна для обеспечения связи.
Первый вариант: РЛС обнаруживает объект (субъект).
Второй вариант: РЛС не обнаруживает объект (субъект).
В первом варианте с одной из каждой позиции могут быть переданы по каналам связи данные об азимуте, дальности и угле места объектов (субъектов), а также местоположение позиции в географических координатах относительно геодезического ориентира. В результате абонент, расположенный на объекте (субъекте), может точно определить свое местонахождение.
Во втором варианте с каждой позиции будут переданы по соответствующим каналам связи на объект (субъекту) данные о его азимуте и угле места, а также единое текущее время, на которое были определены эти координаты.
В результате на объекте (у субъекта) может быть рассчитано его местоположение относительно трех позиций и тем самым абсолютное положение на земле.
С целью улучшения точности расчетов необходимо, чтобы на объекте они велись с учетом единого с получающими объектами времени. С этой целью циклически с каждой позиции излучают два радиоимпульса с периодом, равным удвоенному (или утроенному) значению периода зондирующих импульсов. Удвоение длительности периода обеспечивает отсутствие возможной неоднозначности, связанной с тем, что дальность связи превышает дальность обнаружения.
После этого излучают несколько узких радиоимпульсов с целью уточнения текущего времени на взаимодействующих объектах (у субъектов).
Принимаемые радиоимпульсы на объектах (у субъектов) должны быть ретранслированы, что позволяет на позициях определить ошибки единого времени на объектах (у субъектов), и данные о них будут переданы по соответствующим каналам связи на объекты (субъектам). С целью помехозащищенности эти 2+6...8 радиоимпульсов будут излучаться на разных несущих частотах, изменяясь по псевдослучайному закону.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗМЕЩЕНИЯ ПАРАБОЛИЧЕСКИХ ЗЕРКАЛЬНЫХ АНТЕНН РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОБНАРУЖЕНИЯ ЦЕЛЕЙ КРУГОВОГО ОБЗОРА | 2004 |
|
RU2308131C2 |
| СПОСОБ ЗАЩИТЫ ОТ ВЕТРОВЫХ НАГРУЗОК НА ФАЗИРОВАННЫЕ АНТЕННЫЕ РЕШЕТКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2499336C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СВЯЗИ МЕЖДУ ДВУМЯ РАДИОРЕЛЕЙНЫМИ СТАНЦИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2124810C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| СПОСОБ ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2549350C1 |
| СПОСОБ ЗАЩИТЫ ОТ ВЕТРОВЫХ НАГРУЗОК НА ЗЕРКАЛЬНЫЕ АНТЕННЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2560809C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ | 2015 |
|
RU2577845C1 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
Изобретение относится к радиолокации. Техническим результатом является совместное обнаружение и трассовое сопровождение воздушных, наземных и надводных целей и высокая помехозащищенность. Сущность способа заключается в том, что излучают из нескольких разнесенных позиций определенной длительности с заданным периодом повторения последовательность радиоимпульсов, в каждом периоде следования излучают или принимают от объектов (субъектов) поочередно группы радиоимпульсов: синхронизации, сигналов управления, кода защиты от ошибок, передачи информации, проверочных кодов, с выделением паузы на время защитного интервала и в течение каждого отрезка времени от спада текущего радиоимпульса до фронта последующего радиоимпульса принимают отраженные от цели, поверхности земли или воды и местных предметов радиоимпульсы, производят межпериодное накопление отраженных радиоимпульсов, обнаруживают сигнал цели, сравнивая с заданным порогом амплитуду накопленных импульсов, после приема отраженного последнего в последовательности зондирующего импульса (циклически) излучают высокостабильные по длительности и периоду следования два монохроматических радиоимпульса с удвоенным периодом следования и радиоимпульсы, равноудаленные относительно друг от друга, которые принимают после их ретрансляции. 2 ил.
Способ объединенных радиолокационного автоматического обнаружения и трассового сопровождения при круговом обзоре воздушных, наземных, надводных целей, локальной радиосвязи при ближней радионавигации объектов и субъектов, заключающийся в том, что из нескольких разнесенных радиолокационных станций излучают определенной длительности с заданным периодом повторения Тп последовательность зондирующих радиоимпульсов и в течение каждого отрезка времени от спада текущего радиоимпульса до фронта последующего радиоимпульса принимают с помощью указанных разнесенных радиолокационных станций отраженные от цели, поверхности земли или воды и местных предметов радиоимпульсы, производят межпериодное накопление отраженных радиоимпульсов, обнаруживают сигнал цели, сравнивая амплитуды накопленных радиоимпульсов с заданным порогом, отличающийся тем, что излучают и принимают от объектов и субъектов поочередно группы радиоимпульсов: синхронизации, сигналов управления, кода защиты от ошибок, сигналов передачи информации, проверочных кодов, с выделением паузы на время защитного интервала, перед излучением в каждом очередном периоде повторения зондирующего радиоимпульса из нескольких разнесенных радиолокационных станций, и после приема отраженного последнего в последовательности зондирующего радиоимпульса циклически через 5-6 циклов кругового обзора из нескольких разнесенных радиолокационных станций излучают также на разных несущих частотах высокостабильные по длительности и периоду следования два монохроматических радиоимпульса с удвоенным периодом следования 2 Тп и длительностью 6-10 мкс, а также 6-8 радиоимпульсов длительностью 2-3 мкс равноудаленных относительно друг от друга на 100-70 мкс, принимаемые несколькими разнесенными радиолокационными станциями после их ретрансляции с объектов и субъектов, а после обнаружения сигнала цели осуществляют ее трассовое сопровождение по данным: углы, дальность и скорость сближения, поступающим от цикла к циклу обзора.
| Противовоздушная и противоракетная оборона, 2004, Энциклопедия 21 века, т.9 | |||
| Оружие и технологии, с.548-549 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СИСТЕМА НАВЕДЕНИЯ ОБЪЕКТА ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2229670C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ С ПОМОЩЬЮ ПИКОСЕКУНДНЫХ ИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195688C2 |
| US 5241318 A, 31.08.1993 | |||
| US 6137439 A, 24.10.2000 | |||
| ЦИФРОВОЙ ФАЗОМЕТР ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ СДВИГА ФАЗ | 0 |
|
SU381038A1 |

