Изобретение относится к области разработки систем управления вращающимися по углу крена ракетами, планер которых выполнен по аэродинамической схеме "утка", и может быть использовано в комплексах танкового, противотанкового вооружения, малогабаритных зенитных комплексах, комплексах самонаводящихся ракет.
Известен способ управления ракетой [1], заключающийся в формировании команд управления, подаче их на рулевой привод ракеты и отклонении аэродинамических рулей в соответствии с управляющими сигналами.
Особенность такого способа управления состоит в том, что ракета должна обладать необходимым запасом статической устойчивости в диапазоне рабочих углов атаки. Это означает, что суммарный момент аэродинамических сил, возникающий при угловом отклонении ракеты от положения равновесия, должен быть направлен в сторону положения равновесия.
Это обеспечивается соответствующим выбором формы и размеров аэродинамических рулей и стабилизаторов, положением центра масс ракеты, расстоянием от центра масс ракеты до стабилизаторов и т.п. Следует отметить, что конструктивное выполнение указанных элементов при ограничениях на габариты и вес является сложной задачей, поскольку в комплексах танкового вооружения длина ракеты, как правило, ограничена заряжающим механизмом, а размеры стабилизаторов - необходимостью складывания.
Кроме этого, ракета должна обладать необходимой маневренностью, оцениваемой величиной т.н. "перегрузок". Располагаемые ракетой "перегрузки", а следовательно, и маневренность, будут тем больше, чем больше балансировочные углы атаки и скольжения, характеризующие положение продольной оси ракеты относительно направления движения вектора скорости. Однако балансировочные углы атаки и скольжения ограничены предельно допустимыми значениями по аэродинамической устойчивости в полете управляемой ракеты. Как следствие, ограниченными являются и развиваемые ракетой перегрузки.
Таким образом, увеличение перегрузок, например, с помощью увеличения площади аэродинамических рулей или расстояния от центра масс ракеты до рулей неизбежно ведет к потере управляемой ракетой устойчивости в полете. И наоборот, всякое увеличение запасов устойчивости ведет к уменьшению маневренности.
Наиболее близким по технической сущности к предлагаемому изобретению является способ управления ракетой с аэродинамическими рулями [2], включающий формирование команд управления, подачу их на рулевой привод ракеты и отклонение аэродинамических рулей в соответствии с управляющими сигналами, команда управления формируется в виде трехпозиционного широтно-импульсного модулированного сигнала Uвx с одним нулевым и двумя равными по модулю и противоположными по знаку ненулевыми уровнями, а отклонение рулей производится в соответствии с зависимостью:
δ = δm•signUвх при ненулевых уровнях Uвx;
δ = -α при нулевом уровне Uвx,
где δ- угол отклонения рулей относительно продольной оси ракеты,
δm- максимальный угол отклонения рулей,
α- угол между продольной осью и вектором скорости ракеты.
Известный способ позволяет управлять малоустойчивыми и неустойчивыми в полете ракетами с аэродинамическими рулями. Однако в настоящее время широкое распространение получили ракеты, вращающиеся по углу крена. В системах управления такими ракетами управляющие сигналы, в соответствии с которыми формируются команды управления рулевым приводом, изменяются с частотой, близкой к частоте вращения ракеты. В этом случае применение известного способа затрудняется тем, что частота следования импульсов сигнала Uвx должна выбираться на порядок выше частоты изменения управляющих сигналов, близкой к частоте вращения ракеты по крену (в противном случае в системе возникают биения), а при этом необходимо повышать быстродействие рулевого привода, что сделать довольно сложно.
Задачей предлагаемого изобретения является увеличение маневренности и уменьшение требуемого быстродействия рулевого привода при управлении малоустойчивыми и неустойчивыми в полете ракетами с аэродинамическими рулями, вращающимися по углу крена.
Поставленная задача достигается тем, что в способе, заключающемся в формировании команд управления в виде трехпозиционных широтно-импульсно модулированных сигналов, подаче их на рулевой привод ракеты и отклонении аэродинамических рулей на максимальный по модулю и совпадающий с командой управления по знаку угол при ненулевых позициях команды управления и на угол, направление и величина которого определяются взаимным расположением вектора скорости и продольной оси ракеты, - при нулевой позиции команды управления, формирование команд управления в виде трехпозиционных широтно-импульсно модулированных сигналов осуществляют с удвоенной частотой вращения ракеты по крену в двух взаимно перпендикулярных плоскостях в соответствии с зависимостями:
U1=0,5E[sign(S2+Un)-sign(S2-Un)]signS1,
U2=0,5E[sign(S1+Un)-sign(S1-Un)]signS2,
где S1, S2 - управляющие сигналы,
Е - абсолютная величина ненулевого уровня команд,
параметр Un определяют по зависимости:
Un=C(S1 2+S2 2),
где С - коэффициент пропорциональности, который устанавливают равным
где Крn - желаемый коэффициент передачи рулевого привода по первой гармонике угловых отклонений рулевых органов,
δmax- максимальная абсолютная величина углового отклонения рулевых органов,
амплитуду U0 управляющих сигналов S1, S2 ограничивают на уровне Uогр, удовлетворяющем соотношению
0<Uогр≤1/C,
а дополнительно при нулевых позициях команды управления рули отклоняют на углы, направления которых противоположны, а значения равны углам между вектором скорости ракеты и плоскостями, проходящими через продольную ось ракеты и оси соответствующих рулей.
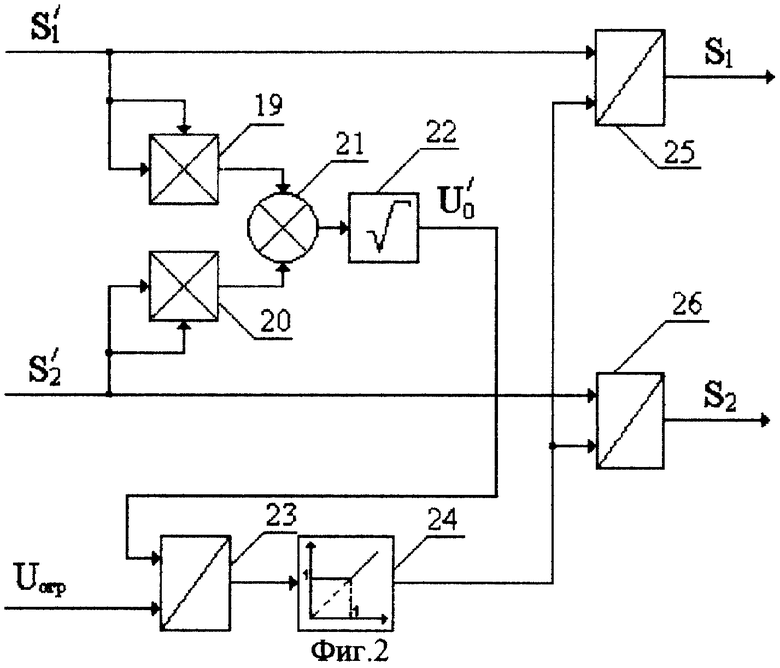
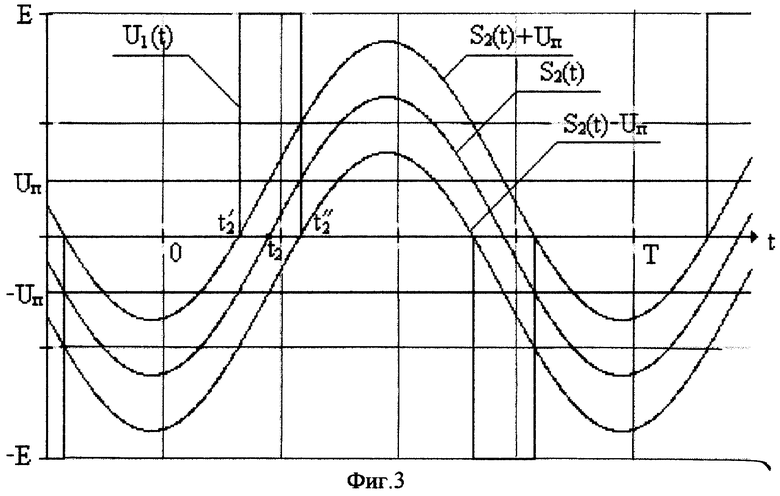
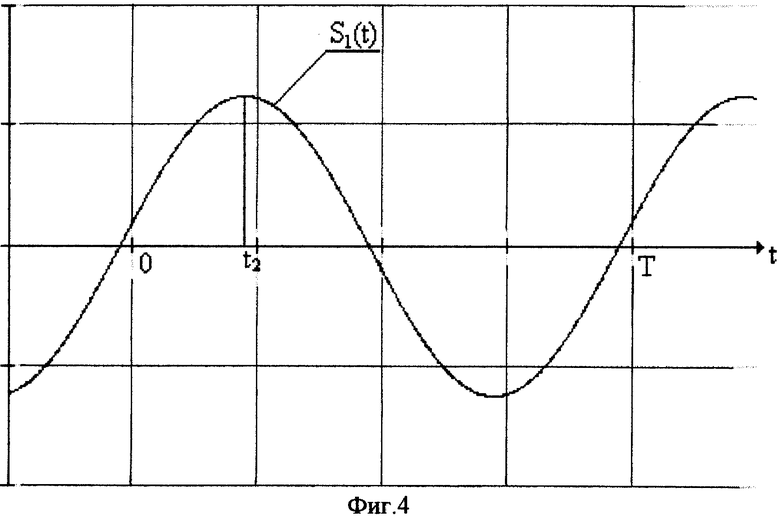
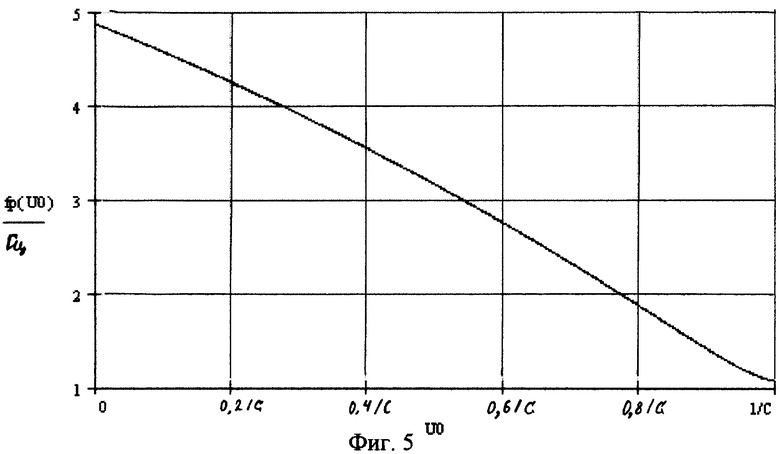
На фиг. 1 представлена функциональная схема, поясняющая действия способа, касающиеся формирования команд управления, на фиг. 2 - возможная функциональная схема ограничения амплитуды управляющих сигналов. Цифрами от 1 до 26 на фиг. 1 и фиг. 2 обозначены математические операции над сигналами. На фиг. 3 представлены графики функций S2(t), S2(t)+Un, S2(t)-Un и U1(t), на фиг. 4 - график функции S1(t), которая определяет знак U1(t), где t - текущее время. На фиг. 5 приведен график зависимости собственной частоты ракеты fp, (в герцах) от амплитуды управляющих сигналов U0, полученный для конкретного примера.
Способ осуществляется следующим образом. Устанавливают коэффициент пропорциональности С (в соответствии с желаемым коэффициентом передачи рулевого привода по первой гармонике угловых отклонений рулевых органов), устанавливают величину Uoгр - уровень ограничения амплитуды U0 управляющих сигналов S1, S2, который не должен превышать значения 1/С (более подробно принцип выбора величины Uoгр рассмотрен в конце данного описания). Далее осуществляют формирование команд управления в виде трехпозиционных широтно-импульсно модулированных сигналов с удвоенной частотой вращения ракеты по крену в двух взаимно перпендикулярных плоскостях в соответствии с зависимостями:
U1=0,5E[sign(S2+Un)-sign(S2-Un)]signS1,
U2=0,5E[sign(S1+Un)-sign(S1-Un)]signS2,
Un=C(S1 2+S2 2)
и производят отклонение аэродинамических рулей в соответствии с зависимостями:
где δ1, δ2- угловые отклонения рулей;
δmax- максимальная абсолютная величина углового отклонения рулей;
α, β- углы между вектором скорости ракеты и плоскостями, проходящими через продольную ось ракеты и оси соответствующих рулей.
Тот факт, что команды управления U1 и U2 являются трехпозиционными сигналами с уровнями -Е, 0 и Е следует непосредственно из зависимостей, в соответствии с которыми эти команды формируются, а факт модуляции этих сигналов с удвоенной частотой вращения ракеты по крену далее будет доказан.
Формирование команд управления осуществляется следующим образом: над управляющими сигналами S1 и S2 осуществляют операции умножения соответственно 1 и 2 таким образом, что каждый из сигналов умножается сам на себя, над результатами операций 1 и 2 осуществляют операцию суммирования 3, над результатом которой в свою очередь производят операцию 4 (умножение на коэффициент С), результатом которой является параметр Un; далее осуществляют операции 5 (суммирование S1 и Un), 6 (вычитание Un из S1), 7 (вычитание Un из S2) и 8 (суммирование S2 и Un,) над результатами которых осуществляют соответственно операции 9, 10, 11 и 12, каждая из которых определяет значение функции 0.5E sign xi, где xi, (i =9, 10, 11, 12) - аргумент соответствующей операции; над результатами операций 9 и 10 осуществляют операцию вычитания 13, а над результатами операций 12 и 11 - операцию вычитания 14; далее над сигналами S1 и S2 производят операции соответственно 17 и 16, каждая из которых определяет значение функции sign yi, где yi, (i =16, 17) - аргумент соответствующей операции; наконец, над результатами операций 14 и 17 осуществляют операцию умножения 18, результатом которой является команда управления U1, а над результатами операций 13 и 16 осуществляют операцию умножения 15, результатом которой является команда управления U2.
Ограничение амплитуды управляющих сигналов U0 может осуществляться следующим образом: над изначально сформированными сигналами S1', S2' осуществляют операции умножения соответственно 19 и 20 таким образом, что каждый из сигналов умножается сам на себя, над результатами операций 19 и 20 осуществляют операцию суммирования 21, над результатом которой в свою очередь производят операцию 22 (извлечение квадратного корня), результатом которой является амплитуда U0' сигналов S1', S2' далее осуществляют операцию 23 (деление U0 на Uoгр), над результатом которой осуществляют операцию нелинейного функционального преобразования 24; наконец, осуществляют операции 25 и 26 (деление соответственно S1', S2' на результат операции 24; результатами операций 25 и 26 являются управляющие сигналы соответственно S1, S2, амплитуда которых не превышает Uoгр.
Описанные выше математические операции над сигналами могут быть реализованы, например, с помощью соответствующих электронных схем. Схемы умножения и деления могут быть реализованы на транзисторах и операционном усилителе (см. [3], с. 162, рис. 11.41), схема извлечения корня может быть реализована с использованием схемы умножения (см. [3], с. 167, рис. 11.47). На операционном усилителе могут быть реализованы: сумматоры (см. [3], с. 137, рис. 11.1), схемы вычитания (см. [3], с. 138, рис. 11.3), усилитель (см. [3] , с. 74, рис. 6.9), компараторы (см. [3], с. 286, рис. 17.21). Функциональный преобразователь может быть реализован на нескольких операционных усилителях (см. [3], с. 156, рис. 11.33).
Среди всего вышесказанного требуют пояснения и доказательства следующие факты:
1. В способе имеет место широтно-импульсная сигналов, причем частота следования импульсов модулированных сигналов равна удвоенной частоте вращения ракеты по крену.
2. Коэффициент С связан с коэффициентом передачи рулевого привода по первой гармонике угловых отклонений рулевых органов зависимостью
3. Амплитуда управляющих сигналов S1 и S2 не должна превышать 1/С.
Необходимые разъяснения с доказательством приведены ниже.
В системах управления вращающимися по крену ракетами управляющие сигналы S1 и S2 имеют одинаковую амплитуду, сдвинуты по фазе один относительно другого на угол π2 и изменяются с частотой, близкой к частоте вращения ракеты. Так, например, в системах телеуправления по сигналам высоты Uy и направления Uz с помощью модулятора формируются гармонические сигналы
где γ- текущий угол крена ракеты;
в системах самонаведения с головки самонаведения, не стабилизируемой по углу крена, поступают сигналы
где  угловая скорость вращения линии визирования цели;
угловая скорость вращения линии визирования цели;
в общем случае сигналы S1, S2 имеют вид
где γ0- фаза сигнала S1.
Приведенные на фиг. 3 и фиг. 4 графики наглядно демонстрируют принцип формирования команды U1, команда U2 формируется аналогично. Как видно из графиков, частота следования импульсов команды U1 равна удвоенной частоте сигнала S1, а значит и удвоенной частоте вращения ракеты по крену, а частота первой гармоники команды U1 равна самой частоте вращения ракеты по крену, причем фаза первой гармоники команды U1 равна фазе сигнала S1. To же самое можно сказать о команде U2 и сигнале S2. По первому из разъясняемых фактов остается доказать, что амплитуда первых гармоник команд управления U1 и U2 пропорциональна амплитуде U0 управляющих сигналов S1 и S2.
Пусть известны величины U0 и γ0 и пусть они постоянны. Необходимо определить моменты времени t'2 и t''2 в которые будут происходить переключения команды U1(t) (см. фиг. 3). Эти моменты времени должны определяться функцией S2(t) и зависеть не только от величин U0 и γ0, но также и от Un.
Время перехода S2(t) с "минуса" на "плюс":
Если к S2(t) прибавить некоторую величину Un, то переход с "минуса" на "плюс" произойдет не в момент t2, а в некоторый момент t'2
Величину t'2 найдем из условия S2(t)+U=0.
Если из S2(t) вычесть величину Un, то переход с "минуса" на "плюс" произойдет в момент t''2.
Формулы (1) и (2) имеют смысл при Un≤U0. Последующие рассуждения будут справедливы только в этом случае.
Найдем первую гармонику сигнала U1(t).


аналогично
После преобразований, аналогичных предыдущим, получим
Перейдем к формуле 
В нашем случае
Поэтому амплитуда A1 пропорциональна U0.
 что подтверждает совпадение фаз первой гармоники сигнала U1(t) и синусоидального сигнала S1(t).
что подтверждает совпадение фаз первой гармоники сигнала U1(t) и синусоидального сигнала S1(t).
Для сигнала U2(t) после аналогичных рассуждений можно получить ту же амплитуду первой гармоники, что и для U1(t) и фазу, равную 
Первый факт доказан.
Амплитуда первой гармоники как сигнала U1(t), так и сигнала U2(t)
при этом амплитуда первой гармоники угла отклонения рулевых органов как δ1, так и δ2 (без учета установки по направлению вектора скорости при нулевой позиции команды управления)
Коэффициент передачи рулевого привода по первой гармонике угловых отклонений рулевых органов:
Из последней формулы следует, что желаемое значение коэффициента передачи рулевого привода можно обеспечить, установив коэффициент С равным
Второй факт доказан.
Подставляя (3) в (1) и (2) и вычитая (1) из (2) получим:
т.е. ширина импульса команды управления соответствует повороту ракеты по крену на угол 2arcsinCU0.
Как видно из (4) и (5), продолжительность импульса на входе рулевого привода и амплитуда первой гармоники угла отклонения рулевых органов при постоянной скорости вращения ракеты по крену однозначно определяются величиной CU0, которая представляет собой отношение параметра Un к амплитуде управляющих сигналов U0.
Как уже было отмечено выше, формулы (1) и (2) (а значит и формула (5), определяющая ширину импульсов команд управления) имеют смысл при выполнении условия Un≤U0, можно сделать вывод, что
0≤CU0≤1,
или
0≤U0≤1/C.
Таким образом, амплитуду U0 управляющих сигналов S1, S2 необходимо ограничивать на уровне Uoгp, удовлетворяющем соотношению
0<Uогр≤1/C.
Третий факт доказан.
Следует отметить, что с увеличением Uогр повышается развиваемое поперечное ускорение ракеты, однако при этом увеличивается максимальная абсолютная величина угла между вектором скорости и продольной осью ракеты, что может привести к потере ракетой устойчивости. Поэтому величину Uoгp, равную или близкую к 1/С можно выбирать только на тех участках полета, на которых осуществляется управление угловым положением ракеты относительно центра масс (угловая стабилизация ракеты). В противном случае, если осуществляется управление координатами центра масс ракеты (участок телеуправления) или направлением вектора скорости (участок самонаведения), величину Uoгp следует выбирать не выше такой, чтобы абсолютная величина угла между вектором скорости и продольной осью ракеты в переходном процессе не превышала δmax, т.к. только таким образом можно исключить возможность потери ракетой устойчивости. Минимальное значение Uогр необходимо выбирать исходя из требуемого значения развиваемого поперечного ускорения ракеты. При выборе Uогр для участка телеуправления необходимо также принимать во внимание наименьшую собственную частоту ракеты, которая уменьшается с ростом Uoгp, а слишком низкая собственная частота затрудняет формирование контура управления (невозможно обеспечить одновременно требуемые запасы устойчивости и высокую точность системы).
Зависимость собственной частоты ракеты fp от амплитуды управляющих сигналов U0 (фиг. 5) получена для конкретного примера с помощью теоретического анализа и подтверждена результатами математического моделирования. Как видно из графика, способ позволяет при необходимости повысить собственную частоту ракеты за счет уменьшения развиваемого поперечного ускорения ракеты (из-за ограничения амплитуды управляющих сигналов U0) или, наоборот, повысить развиваемое поперечное ускорение за счет уменьшения собственной частоты ракеты.
Источники информации
1. А.А. Дмитриевский, В.П. Казаковцев и др. Движение ракет. М., 1968 г.
2. РФ патент 2148780, МПК6 F 42 В 15/01, 2000 г.
3. У. Титце, К. Шенк. Полупроводниковая схемотехника: Справочное руководство. М.: Мир, 1983 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА (ВАРИАНТЫ) | 2006 |
|
RU2326323C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 1998 |
|
RU2148780C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2005 |
|
RU2282816C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
Изобретение относится к области систем управления вращающимися по углу крена ракетами, планер которых выполнен по аэродинамической схеме "утка". Технический результат - увеличение маневренности и уменьшение требуемого быстродействия рулевого привода при управлении малоустойчивыми и неустойчивыми в полете ракетами с аэродинамическими рулями, вращающимися по углу крена. Способ управления ракетой с аэродинамическими рулями согласно изобретению включает формирование команд управления в виде трехпозиционных широтно-импульсно модулированных сигналов, подачу их на рулевой привод ракеты и отклонение аэродинамических рулей на максимальный по модулю и совпадающий с командой управления по знаку угол при ненулевых позициях команды управления и на угол, направление и величина которого определяются взаимным расположением вектора скорости и продольной оси ракеты, - при нулевой позиции команды управления, формирование команд управления в виде трехпозиционных широтно-импульсно модулированных сигналов осуществляют с удвоенной частотой вращения ракеты по крену в двух взаимно перпендикулярных плоскостях в соответствии с определенными математическими зависимостями. 5 ил.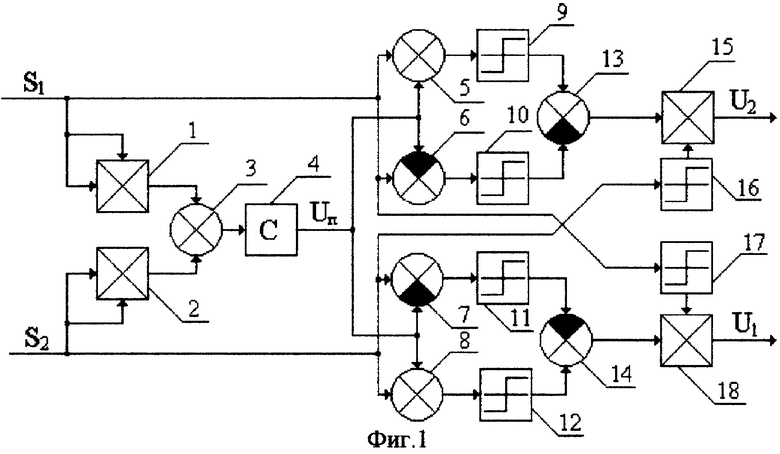
Способ управления ракетой с аэродинамическими рулями, включающий формирование команд управления в виде трехпозиционных широтно-импульсно модулированных сигналов, подачу их на рулевой привод ракеты и отклонение аэродинамических рулей на максимальный по модулю и совпадающий с командой управления по знаку угол при ненулевых позициях команды управления и на угол, направление и величина которого определяются взаимным расположением вектора скорости и продольной оси ракеты, - при нулевой позиции команды управления, отличающийся тем, что формирование команд управления в виде трехпозиционных широтно-импульсно модулированных сигналов осуществляют с удвоенной частотой вращения ракеты по крену в двух взаимно перпендикулярных плоскостях в соответствии с зависимостями
U1 = 0,5E [sign(S2+Un)-sign(S2-Un)] signS1,
U2 = 0,5E[sign(S1+Un)-sign(S1-Un)] signS2,
где S1, S2 - управляющие сигналы;
Е - абсолютная величина ненулевого уровня команд,
параметр Un определяют по зависимости
Un = C(S2 1+S2 2),
где С - коэффициент пропорциональности, который устанавливают равным
где Крп - желаемый коэффициент передачи рулевого привода по первой гармонике угловых отклонений рулевых органов;
δmax- максимальная абсолютная величина углового отклонения рулевых органов,
амплитуду U0 управляющих сигналов S1, S2 ограничивают на уровне Uoгp, удовлетворяющем соотношению
O < Uoгp≤l/C,
и дополнительно при нулевых позициях команды управления рули отклоняют на углы, направления которых противоположны, а значения равны углам между вектором скорости ракеты и плоскостями, проходящими через продольную ось ракеты и оси соответствующих рулей.
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 1998 |
|
RU2148780C1 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4542870, 24.09.1985 | |||
| US 4898341, 06.02.1990 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
