Изобретение относится к радиолокации и может использоваться на летательных аппаратах (ЛА) при совершении ими маловысотных полетов и при посадке на необорудованные площадки.
В связи с проблемой обеспечения безопасности полетов самолетов и вертолетов на малых и сверхмалых высотах к бортовым радиолокационным системам (РЛС) предъявляются достаточно жесткие требования по обнаружению различных препятствий по линии пути летательного аппарата, в частности проводов линий электропередач (ЛЭП), как одного из самых труднообнаруживаемых опасных препятствий. Известно [Хлопов Г.И. Когерентная радиолокация в миллиметровом диапазоне // Зарубежная радиоэлектроника, 1999, №9, с.15], что в ЛЭП применяют витые алюминиевые провода с внешним диаметром d от 10 до 36 мм. В случае обнаружения проводов с помощью РЛС их эффективная площадь рассеяния (ЭПР) σп определяется формулой:

где R - расстояние до провода; G2(α) - функция, позволяющая учесть диаграмму рассеяния провода; α - угол между перпендикуляром к проводу и направлением, с которого определяется величина ЭПР провода; γ - коэффициент шероховатости, учитывающий рассеяние энергии падающего электромагнитного поля неоднородностями поверхности провода (витыми жилами);  - область первой зоны Френеля; k=2π/λ - волновое число; λ - длина волны используемого в РЛС радиосигнала.
- область первой зоны Френеля; k=2π/λ - волновое число; λ - длина волны используемого в РЛС радиосигнала.
При обнаружении проводов на фоне подстилающей поверхности (луг, поле, лес и т.п.), имеющей удельную ЭПР σ0, способность РЛС обнаруживать провода характеризуется отношением сигнал/фон (или радиоконтрастностью) q, которое определяется выражением
где σф=RпθβΔRσ0 - ЭПР фона подстилающей поверхности, имеющего удельную ЭПР σ0; θβ - ширина диаграммы направленности антенны РЛС в азимутальной плоскости; Rп - расстояние до подстилающей поверхности; ΔR - разрешающая способность РЛС по дальности [Радиолокационные станции с цифровым синтезированием апертуры антенны. / Под ред. В.Т.Горяинова. - М.: Радио и связь, 1988, с.23].
Используя приведенную формулу, можно показать, что для гарантированного обнаружения проводов ЛЭП на фоне поверхности с удельной ЭПР σ0, равной -15...-5 дБ, РЛС должна иметь разрешающую способность по дальности ΔR не менее 0,3...0,5 м.
При применении в РЛС согласованной фильтрации для обеспечения указанной разрешающей способности по дальности требуется ширина спектра зондирующего сигнала и полоса пропускания приемного устройства (ПРМУ) порядка 500...300 МГц. Радиолокационные станции, в которых указанное выше значение ширины спектра зондирующих сигналов и полоса пропускания ПРМУ обеспечиваются применением сверхкоротких зондирующих импульсов, широко известны, это, например, станции, описанные в [Скосырев В.Н., Осипов М.Л. Особенности и свойства короткоимпульсной радиолокации // Вестник МГТУ. Сер. Приборостроение, 1999, №4], [Вопросы подповерхностной радиолокации. / Под ред. А.Ю.Гринева. - М.: Радиотехника, 2005, с.102-146], [Хармут Х.Ф. Несинусоидальные волны в радиолокации и радиосвязи. - М.: Мир, 1985, с.31-49], [Астанин Л.Ю., Костылев А.А. Основы сверхширокополосных радиолокационных измерений. - М.: Радио и связь, 1989, с.134-136], [Ширман Я.Д., Орленке В.М. Тенденции повышения радиолокационного разрешения. // Космическая радиофизика, 1998, №3]. К недостаткам таких РЛС можно отнести сложность и высокую стоимость, поскольку для их реализации требуется высокопроизводительная элементная база в ПРМУ и аналого-цифровых преобразователях (АЦП); необходимость применения высокопроизводительных интерфейсов для передачи данных из АЦП в процессор сигналов и из процессора сигналов в бортовую цифровую вычислительную машину (ЦВМ), которая также должна быть высокопроизводительной для обеспечения обработки большого потока поступающей из процессора сигналов информации.
Известны также РЛС, в которых высокая разрешающая способность по дальности обеспечивается либо за счет внутриимпульсной модуляции излучаемых радиоимпульсов и различных способов сжатия принимаемых радиосигналов в процессе их первичной обработки [Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975, с.38-42], патенты: [SU 675607, 25.07.1979; US 4388729, 14.06.1983; ЕР 0109880 A1, 30.05.1984; US 4484335, 20.11.1984; GB 2197567 А, 18.05.1988; US 5048059 А, 10.09.1991; US 5414728 А, 09.05.1995; JP 07046157 А, 14.02.1995], либо использованием последовательности радиоимпульсов с различными от импульса к импульсу периодами повторения, патент [RU №2154899 С1, 20.08. 2000]. Общий недостаток упомянутых РЛС обусловлен тем, что для их реализации требуются ПРМУ, в которых существенно расширена полоса пропускания, по сравнению с ПРМУ РЛС, в которой используются немодулированные радиосигналы. Однако известно [Справочник по радиолокации. / Под ред. М.Сколника. - М.: Сов. радио, 1976, T.1, c.29, 38-41], что широкополосное ПРМУ по сравнению с узкополосным имеет более низкие показатели помехозащищенности и более высокие значения собственных шумов, что приводит в конечном итоге к уменьшению дальности действия РЛС и к снижению вероятности обнаружения опасных препятствий, в том числе и проводов ЛЭП.
Из известных технических решений наиболее близким (прототипом) является РЛС, рассмотренная в патенте RU №2258939 С1, 20.08.2005, которая за счет высокого разрешения по дальности может обеспечить обнаружение проводов ЛЭП на фоне отражений от подстилающей поверхности.
Недостатком прототипа является низкая достоверность идентификации проводов ЛЭП, поскольку в РЛС при обработке принимаемых радиосигналов не используются характерные признаки ЛЭП - протяженность проводов и наличие опор ЛЭП, имеющих значительно более высокую ЭПР по сравнению с ЭПР проводов.
Задачей изобретения является обеспечение высокой достоверности обнаружения препятствий по линии полета летательного аппарата и высокой достоверности обнаружения проводов ЛЭП как наиболее опасных из всех видов препятствий.
Поставленная задача достигается тем, что в РЛС для обнаружения проводов ЛЭП, содержащую запоминающее устройство, ЦВМ, АЦП, квадратурный фазовый детектор (КФД), ПРМУ, антенный переключатель (АП), антенную систему, передатчик (ПРД), синхронизатор, введен обнаружитель ЛЭП, который корреляционным способом осуществляет идентификацию проводов ЛЭП, обеспечивая этим достоверное обнаружение проводов ЛЭП.
На чертеже приведена структурная схема РЛС для обнаружения проводов ЛЭП, где обозначено:
1 - запоминающее устройство (ЗУ);
2 - антенная система (АС);
3 - антенный переключатель (АП);
4 - приемное устройство (ПРМУ);
5 - квадратурный фазовый детектор (КФД);
6 - аналого-цифровой преобразователь (АЦП);
7 - цифровая вычислительная машина (ЦВМ);
8 - передатчик (ПРД);
9 - синхронизатор;
10 - обнаружитель ЛЭП.
В РЛС для обнаружения проводов ЛЭП первый вход ЗУ 1 предназначен для ввода в него начальных данных, а второй вход, являющийся одновременно и его выходом, соединен с первым входом ЦВМ 7, являющимся одновременно и ее первым выходом, второй вход ЦВМ 7 соединен с выходом АЦП 6, первый вход которого соединен с выходом КФД 5, первый вход которого соединен с выходом ПРМУ 4, первый вход которого соединен со вторым выходом АП 3, первый вход которого, являющийся одновременно и его первым выходом, соединен с входом антенной системы 2, являющимся одновременно и ее выходом, второй вход АП 3 соединен с выходом ПРД 8, выход синхронизатора соединен с входом ПРД 8, вторым входом ПРМУ 4, вторым входом КФД 5, вторым входом АЦП 6, третий выход ЦВМ 7 предназначен для выдачи информации потребителям информации, обнаружитель ЛЭП 10, вход которого, являющийся одновременно и его выходом, соединен с третьим входом ЦВМ 7.
Заявленное устройство работает следующим образом.
В ЗУ 1 вводят и запоминают: τи - значение длительности излучаемых радиоимпульсов; Тп - значение периода повторения излучаемых радиоимпульсов; f1, fМ, Δf - соответственно начальное, конечное значение несущей частоты излучаемых радиоимпульсов и шаг перестройки частоты; М - число, определяющее количество импульсов в излучаемой последовательности радиоимпульсов; К - число, определяющее максимальное количество импульсов на выходе АЦП; С - значение скорости света; Д0 - начальная дальность анализируемого участка местности; Uпорк - значение порога корреляции; ЭМ - эталонная матрица; х и y - координаты ячейки матрицы обнаружения (МО), с которой необходимо начинать процесс идентификации проводов ЛЭП.
Поясним понятия "эталонная матрица" и "матрица обнаружения".
Как показано в патенте [RU №2258939 C1, 20.08.2005], в результате обработки принимаемых отраженных от земли радиосигналов в РЛС формируется матрица амплитуд, в каждой ячейке которой записано значение амплитуды радиосигнала, отраженного от определенного участка земной поверхности. Если значение каждой ячейки матрицы амплитуд сравнить с порогом и в те ее ячейки, в которых амплитуда сигнала превысит порог, записать единицу, в противном случае ноль, то в результате формируется "матрица обнаружения".
"Эталонная матрица" - это матрица, подобная матрице обнаружения, но формируемая по результатам либо ранее снятых радиолокационных портретов проводов ЛЭП, либо радиолокационных портретов ЛЭП, полученных в результате полунатурного моделирования. Используемый в заявленной РЛС способ идентификации проводов ЛЭП не накладывает ограничений на вид ЭМ - она может быть любой. В качестве простейшей ЭМ можно использовать матрицу размером 2×М/3, где М - размер матрицы обнаружения, во всех ячейках которой записана "1". Эталонная матрица, с помощью которой можно более достоверно обнаружить ЛЭП, имеет размер 3×М/3, во всех ячейках средней строки которой записана "1", а в крайних - нули, за исключением ячеек, расположенных друг от друга через определенные интервалы, пропорциональные среднему расстоянию между опорами ЛЭП: в этих ячейках записана "1".
ПРД 8 по синхроимпульсам, поступающим из синхронизатора 9, формирует последовательность из М радиоимпульсов прямоугольной формы длительностью τи, одинаковой амплитуды Uизл, с периодом повторения Тп и несущими частотами fm каждого m-го радиоимпульса, задаваемыми формулой

где fm - частота m-ого радиоимпульса; f1 - значение частоты первого излученного радиоимпульса; Δf - шаг перестройки частоты;  - номер излученного импульса, а М - число импульсов в излучаемой последовательности (здесь и далее черта над символами означает, что переменная, в данном случае m, принимает целочисленные значения от 1 до максимального значения, в данном случае М, с шагом 1).
- номер излученного импульса, а М - число импульсов в излучаемой последовательности (здесь и далее черта над символами означает, что переменная, в данном случае m, принимает целочисленные значения от 1 до максимального значения, в данном случае М, с шагом 1).
Сформированные радиоимпульсы с выхода ПРД 8 через АП 3 поступают в АС 2, которая излучает их в пространство.
В качестве синхронизатора 9, ПРД 8, АП 3, АС 2 могут быть использованы синхронизатор, ПРД, АП, АС, применяемые в настоящее время в РЛС, например, описанные в заявке на изобретение RU 2004108814 от 24.03.2004 или в патенте RU 2260195 от 11.03.2004.
AC 2 принимает отраженные от земли, местных предметов и, возможно, от ЛЭП радиосигналы, которые с ее выхода через АП 3 поступают на вход ПРМУ 4. ПРМУ 4 по сигналам от синхронизатора 9 открывается на время, определяемое моментами времени t0 и tк, и усиливает принятые за это время радиосигналы.
В качестве ПРМУ 4 может быть использовано приемное устройство, применяемое в настоящее время в РЛС, полоса пропускания которого оптимизирована на прием одиночного радиоимпульса прямоугольной формы длительностью τи, например, описанное в монографии [Теоретические основы радиолокации. / Под ред. Я.Д.Ширмана - М.: Сов. радио, 1970, стр.127-131].
С выхода ПРМУ 4 усиленные радиоимпульсы поступают на вход КФД 5, который формирует синусную и косинусную составляющие принимаемых радиосигналов.
В качестве КФД 5 может быть использован квадратурный синхронный детектор, состоящий из двух фазовых детекторов, фазовращателя и двух фильтров низкой частоты, применяемый в настоящее время в РЛС [Радиолокационные измерители дальности и скорости. T.1, В.И.Меркулов, А.И.Перов, В.Н.Саблин и др. / Под ред. В.Н.Саблина. - М.: Радио и связь, 1999, стр.175-176].
Синусная и косинусная составляющие принимаемых сигналов с выхода КФД 5 поступают на вход АЦП 6, который их преобразует в цифровую форму и объединяет, формируя единый сигнал, устраняя этим зависимость его амплитуды от случайных начальных фаз принимаемых радиосигналов. АЦП 6 тактируется частотой Fацп, равной

В результате на выходе АЦП 6 формируется М последовательностей из К чисел, каждое из которых соответствует значению амплитуды принимаемого сигнала Unpmk от k-го участка дальности; подстрочный индекс у символа "Uпрmk" означает, что соответствующая амплитуда принимаемого сигнала Uпрmk получена при приеме радиоимпульса с несущей частотой fm, а подстрочный индекс  определяет порядковый номер амплитуды принимаемого сигнала Uпрmk в каждой из М последовательностей.
определяет порядковый номер амплитуды принимаемого сигнала Uпрmk в каждой из М последовательностей.
К АЦП 6 не предъявляется особых требований: в качестве него может быть использован АЦП, применяемый в настоящее время в РЛС, например узел АЦП, состоящий из двухканального АЦП и двух предварительных сумматоров, описанный в монографии [Радиолокационные измерители дальности и скорости. Т.1 В.И.Меркулов, А.И.Перов, В.Н.Саблин и др. / Под ред. В.Н.Саблина. - М.: Радио и связь, 1999, стр.175-179].
ЦВМ 7 получает с выхода АЦП 6 упомянутые последовательности амплитуд принятых сигналов Uпрmk и выполняет умножение каждой амплитуды Uпрmk на опорную функцию

формируя этим последовательность из М·К значений амплитуд импульсов Umk

где Д0 - начальная дальность анализируемого участка местности; С - скорость света.
Полученные значения амплитуд импульсов Umk ЦВМ 7 записывает в ЗУ 1 в виде матрицы размером М×К, причем в ячейках столбцов этой матрицы ЦВМ 7 записывает амплитуды Umk (3) с одинаковыми значениями k и с возрастающими от 1 до М значениями m, а в ячейках каждой строки - значения амплитуд импульсов Umk с возрастающими от 1 до К значениями k и с одинаковыми значениями m.
После этого ЦВМ 7 считывает из ЗУ 1 К раз по М значений амплитуд импульсов Umk, записанных в столбцах упомянутой матрицы, каждый раз выполняя над ними операцию дискретного преобразования Фурье (ДПФ) на М точек. Результаты выполнения операций ДПФ ЦВМ 7 записывает в матрицу размером М×К, в каждой из ячеек которой находятся значения амплитуд принятых радиоимпульсов. Эту матрицу, называемую часто в литературе матрицей амплитуд (МА), ЦВМ 7 запоминает в ЗУ 1 и выдает в обнаружитель ЛЭП 10.
Обнаружитель ЛЭП 10 представляет собой вычислитель, оптимизированный на решение задачи обнаружения проводов ЛЭП посредством корреляционной функции Rкор(х,y)) (4). Однако, если производительность ЦВМ высокая, то он может быть реализован и в ЦВМ в виде ее составной части, выполняющей решение вышеупомянутой задачи.
Обнаружитель ЛЭП 10 выполняет следующее:
1) получает из ЦВМ 7 значение порога Uп, которое она считывает из ЗУ 1;
2) последовательно сравнивает значения амплитуд радиосигналов, записанных в ячейках МА, со значением порога Uп и, если значение амплитуды радиосигнала в проверяемой ячейке больше значения порога, то в эту ячейку записывает единицу, в противном случае - ноль. В результате этих операций формируется матрица обнаружения (МО), в ячейках которой записаны нули или единицы;
3) на основе данных, записанных в ячейках матрицы обнаружения, заполняет паспорта на все обнаруженные объекты.
Поясним понятие "паспорт". Слово "паспорт" в описаниях работы современных РЛС используется тогда, когда требуется обобщить различные характеристики обнаруженных объектов. Поскольку современные РЛС способны обнаруживать и сопровождать до нескольких десятков объектов, то для упорядочивания параметров этих объектов при их передаче между различными блоками РЛС и вводят понятие паспорт, под которым понимают стандартный для каждой РЛС набор таких характеристик объектов как номер обнаруженного объекта, его пространственные координаты, его скорость и ускорение, индивидуальные характеристики объекта и т.п.
Заполнение паспортов обнаружитель ЛЭП 10 осуществляет следующим образом:
- последовательно сравнивает числа, записанные в ячейках первой строки, начиная с первой, с единицей, при этом, если в первой ячейке записана "1", то начинает заполнение паспорта на первый обнаруженный объект, в который записывает номер объекта и его координаты в виде номера строки и номера столбца матрицы обнаружения; если в первой ячейке записан "0", то переходит к следующей ячейке;
- если очередная проверяемая ячейка содержит "1", то проверяет наличие объекта в предыдущей ячейке строки; если и в ней записана "1", то в паспорт, соответствующий этой ячейке, вносит изменение, добавляя к номеру ячейки очередной номер;
- если в предыдущей ячейке записан "0", то заполняет новый паспорт, внося в него очередной номер обнаруженного объекта и его координаты;
- если проверяемая ячейка содержит "0", то переходит к проверке очередной ячейки;
- после проверки последней ячейки первой строки переходит к проверке первой ячейки второй строки; если она содержит "1", то проверяет первую ячейку первой строки на наличие в ней "1", при этом, если эта проверка дает положительный результат, то в паспорт, соответствующий этой ячейке, вносит изменение, добавляя к номеру строки очередной номер; если проверка дает отрицательный результат, то заполняет новый паспорт, внося в него очередной номер обнаруженного объекта и его координаты;
- далее проверяет все оставшиеся ячейки второй строки; при обнаружении "1" в любой из этих ячеек проверяет ячейки, находящиеся слева и сверху от той, в которой обнаружена "1", при этом, если в ячейке слева записана "1", а в ячейке сверху записан "0", то в паспорт, соответствующий левой ячейке, вносит изменение, добавляя к номеру ячейки очередной номер; если в ячейке сверху записана "1", а в ячейке слева - "0", то в паспорт, соответствующий верхней ячейке, вносит изменение, добавляя к номеру строки очередной номер; если в ячейках сверху и слева записаны "1", то в паспорт, соответствующий верхней ячейке, вносит изменение, добавляя к номеру строки очередной номер; если в ячейках сверху и слева записаны "0", то заполняет новый паспорт, внося в него очередной номер обнаруженного объекта и его координаты;
- далее проверяет ячейки всех оставшихся строк МО по вышеописанному правилу;
- заполненные паспорта на все обнаруженные цели обнаружитель ЛЭП 10 выдает в ЦВМ 7, которая запоминает их в ЗУ 1;
4) получает из ЦВМ 7 эталонную матрицу (ЭМ), которую она считывает из ЗУ 1. К виду эталонной матрицы заявленное устройство не предъявляет особых требований: она может быть любой, например размером 3×М/3, во всех ячейках средней строки которой записана "1", а в крайних - нули, за исключением ячеек, расположенных друг от друга через определенные интервалы, пропорциональные среднему расстоянию между опорами ЛЭП; в эти ячейки записаны "1";
5) используя значения чисел, записанных в ЭМ и МО по формуле
(где UMO и UЭМ - амплитуды сигналов МО и ЭМ соответственно; М и К - размеры матрицы обнаружения; m и k - текущие координаты ячеек МО; х и y - координаты ячейки МО, с которой начинается отыскание значения корреляционной функции Rкор(x,y)), вычисляет значение корреляционной функции Rкор(х,y) для каждого возможного взаимного положения ЭМ и МО;
6) получает из ЦВМ 7 значение порога корреляции Uпорк, которое она считывает из ЗУ 1;
7) найденные значения корреляционной функции Rкор(х,y) (4) сравнивает со значением порога корреляции Uпорк, при этом, если значение корреляционной функции превысит значение порога, то заполняет паспорт, в который записывает заранее заданное число, сигнализирующее об обнаружении ЛЭП, и координаты обнаруженных опор и проводов ЛЭП; если значение порога превысят несколько значений корреляционной функции, то заполняет столько паспортов, сколько значений корреляционной функции превысило значение порога, в которые записывает заранее заданные условные числа, сигнализирующие об обнаружении ЛЭП, и координаты обнаруженных опор и проводов ЛЭП; если ни одно значение корреляционной функции не превысит значение порога, то паспорта на обнаруженные ЛЭП не заполняет;
8) при наличии заполненных паспортов на обнаруженные ЛЭП блок обнаружения ЛЭП 10 выдает их в ЦВМ 7, которая запоминает их в ЗУ 1. В случае отсутствия заполненных паспортов на обнаруженные ЛЭП, блок обнаружения ЛЭП 10 выдает в ЦВМ 7 сигнал об окончании своей работы.
После этого ЦВМ 7 считывает из ЗУ 1 содержимое МА и все запомненные паспорта на обнаруженные объекты и ЛЭП и передает все это потребителям информации, в качестве которых могут быть система управления ЛА, индикаторы и др.
Заявленное устройство за счет применения обнаружителя проводов ЛЭП, оптимизированного на решение задачи идентификации проводов ЛЭП посредством вычисления корреляционной функции между эталонной матрицей и матрицей амплитуд, по сравнению с прототипом обладает значительно более высокой вероятностью обнаружения проводов ЛЭП как наиболее опасных из всех видов препятствий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ И СЖАТИЯ РАДИОСИГНАЛОВ | 2004 |
|
RU2258939C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2006 |
|
RU2313054C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ | 2008 |
|
RU2360204C1 |
| КОДОВЫЙ ДАЛЬНОМЕР ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2149422C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ | 2005 |
|
RU2296346C2 |
| УСТРОЙСТВО НЕЛИНЕЙНОГО ПОДАВЛЕНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2007 |
|
RU2360360C1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2282873C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
Изобретение относится к радиолокации и может быть использовано на летательных аппаратах при совершении ими маловысотных полетов. Предлагаемая радиолокационная система для обнаружения проводов линий электропередач за счет использования специального вычислителя, оптимизированного на решение задачи идентификации проводов линий электропередач, дает возможность летчику (оператору) с большой достоверностью обнаруживать провода и опоры линий электропередач, значительно повысив этим безопасность маловысотных полетов летательных аппаратов и заход их на посадку на необорудованные площадки, что и является достигаемым техническим результатом. 1 ил.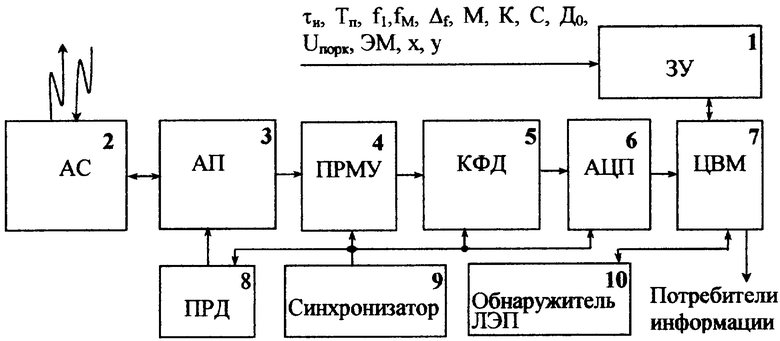
Радиолокационная система (РЛС) для обнаружения проводов линий электропередач (ЛЭП), содержащая запоминающее устройство (ЗУ), первый вход которого предназначен для ввода и последующего запоминания числа М, определяющего количество импульсов в излучаемой последовательности радиоимпульсов, числа К, определяющего максимальное количество импульсов на выходе аналого-цифрового преобразователя (АЦП), значения порога обнаружения Uп, порога корреляции Uпорк и эталонной матрицы, а второй вход, являющийся одновременно и его выходом, соединен с первым входом цифровой вычислительной машины (ЦВМ), являющимся одновременно и ее первым выходом, второй вход ЦВМ соединен с выходом АЦП, первый вход которого соединен с выходом квадратурного фазового детектора (КФД), первый вход которого соединен с выходом приемного устройства (ПРМУ), первый вход которого соединен с вторым выходом антенного переключателя (АП), первый вход которого, являющийся одновременно и его первым выходом, соединен с входом антенной системы, являющимся одновременно и ее выходом, второй вход АП соединен с выходом передатчика (ПРД), выход синхронизатора соединен с входом ПРД, вторым входом ПРМУ, вторым входом КФД, вторым входом АЦП, при этом ЦВМ получает с выхода АЦП последовательности амплитуд принятых сигналов Umk, которые записывают в ЗУ и из которых формируют матрицу амплитуд размером МхК, причем в ячейках столбцов этой матрицы записывают амплитуды с одинаковыми значениями k, где k - подстрочный индекс  , и с возрастающими от 1 до М значениями m, а в ячейках каждой строки - значения амплитуд импульсов Umk с возрастающими от 1 до К значениями k и с одинаковыми значениями m, запоминают матрицу амплитуд в ЗУ, отличающаяся тем, что в нее введен обнаружитель ЛЭП, вход которого, являющийся одновременно и его выходом, соединен с третьим входом-выходом ЦВМ, при этом обнаружитель ЛЭП оптимизирован на идентификацию проводов за счет того, что получает из ЦВМ значение порога обнаружения Uп, считываемое из ЗУ, сравнивает значения амплитуд радиосигналов, записанных в ячейках матрицы амплитуд, со значениями порога обнаружения Uп, формируя матрицу обнаружения на основании данных, записанных в ячейках матрицы обнаружения, заполняют паспорта на все обнаруженные объекты, вводя в них номера обнаруженных объектов и их координаты, заполненные паспорта на все обнаруженные объекты обнаружитель ЛЭП выдает в ЦВМ, которая запоминает их в ЗУ, затем обнаружитель ЛЭП получает из ЦВМ эталонную матрицу, которую та считывает из ЗУ, используя значения чисел, записанных в эталонной матрице и матрице обнаружения, вычисляют значение корреляционной функции для каждого возможного взаимного положения эталонной матрицы и матрицы обнаружения, обнаружитель ЛЭП получает из ЦВМ порог корреляции Uпкор, считываемый из ЗУ, сравнивают значение корреляционной функции со значением порога корреляции, при этом, если значение корреляционной функции превышает значение порога, то заполняют паспорт, в который записывают заранее заданное число, сигнализирующее об обнаружении ЛЭП, и координаты обнаруженных опор и проводов ЛЭП, если значение порога превышает несколько значений корреляционной функции, то заполняют столько паспортов, сколько значений корреляционной функции превысило значение порога, в которые записывают заранее заданные условные числа, сигнализирующие об обнаружении ЛЭП, и координаты обнаруженных опор и проводов ЛЭП, при наличии заполненных паспортов на обнаруженные ЛЭП обнаружитель ЛЭП выдает их в ЦВМ, которые затем записывают в ЗУ, после этого в ЦВМ считывают из ЗУ все запомненные паспорта на обнаруженные объекты и провода ЛЭП и передают их потребителю, в случае отсутствия заполненных паспортов на обнаруженные ЛЭП, обнаружитель ЛЭП выдает в ЦВМ сигнал об окончании своей работы.
, и с возрастающими от 1 до М значениями m, а в ячейках каждой строки - значения амплитуд импульсов Umk с возрастающими от 1 до К значениями k и с одинаковыми значениями m, запоминают матрицу амплитуд в ЗУ, отличающаяся тем, что в нее введен обнаружитель ЛЭП, вход которого, являющийся одновременно и его выходом, соединен с третьим входом-выходом ЦВМ, при этом обнаружитель ЛЭП оптимизирован на идентификацию проводов за счет того, что получает из ЦВМ значение порога обнаружения Uп, считываемое из ЗУ, сравнивает значения амплитуд радиосигналов, записанных в ячейках матрицы амплитуд, со значениями порога обнаружения Uп, формируя матрицу обнаружения на основании данных, записанных в ячейках матрицы обнаружения, заполняют паспорта на все обнаруженные объекты, вводя в них номера обнаруженных объектов и их координаты, заполненные паспорта на все обнаруженные объекты обнаружитель ЛЭП выдает в ЦВМ, которая запоминает их в ЗУ, затем обнаружитель ЛЭП получает из ЦВМ эталонную матрицу, которую та считывает из ЗУ, используя значения чисел, записанных в эталонной матрице и матрице обнаружения, вычисляют значение корреляционной функции для каждого возможного взаимного положения эталонной матрицы и матрицы обнаружения, обнаружитель ЛЭП получает из ЦВМ порог корреляции Uпкор, считываемый из ЗУ, сравнивают значение корреляционной функции со значением порога корреляции, при этом, если значение корреляционной функции превышает значение порога, то заполняют паспорт, в который записывают заранее заданное число, сигнализирующее об обнаружении ЛЭП, и координаты обнаруженных опор и проводов ЛЭП, если значение порога превышает несколько значений корреляционной функции, то заполняют столько паспортов, сколько значений корреляционной функции превысило значение порога, в которые записывают заранее заданные условные числа, сигнализирующие об обнаружении ЛЭП, и координаты обнаруженных опор и проводов ЛЭП, при наличии заполненных паспортов на обнаруженные ЛЭП обнаружитель ЛЭП выдает их в ЦВМ, которые затем записывают в ЗУ, после этого в ЦВМ считывают из ЗУ все запомненные паспорта на обнаруженные объекты и провода ЛЭП и передают их потребителю, в случае отсутствия заполненных паспортов на обнаруженные ЛЭП, обнаружитель ЛЭП выдает в ЦВМ сигнал об окончании своей работы.
| СПОСОБ ФОРМИРОВАНИЯ И СЖАТИЯ РАДИОСИГНАЛОВ | 2004 |
|
RU2258939C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1999 |
|
RU2176400C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ ДО ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2260198C9 |
| US 4737788 A, 12.04.1988 | |||
| US 6850185 B1, 01.02.2005 | |||
| DE 3328340 A1, 14.02.1985. | |||

