Изобретение относится к робототехнике и может быть использовано для автоматизированной уборки мусора в жилых помещениях, а также в производственных помещениях, например складских. Предпочтительнее ее использование в офисных, выставочных залах и т.п.
По результатам исследований крупнейших мировых производителей техники сфера создания роботов развивается быстрыми темпами: продажи растут, спрос постоянно увеличивается, расширяется спектр их использования, возрастает объем заказа рынка. Специальная европейская Экономическая комиссия ООН и Международная федерация робототехники осенью 2005 года опубликовала доклад, согласно которому потребность в механических «помощниках» становится все более актуальной, - в области промышленного производства, домашнего хозяйства и услуг (таблица). Имеется прогноз, что в ближайшие годы резко возрастет количество роботов и в домашнем хозяйстве (стрижка газонов и чистка ковров).
В настоящее время в промышленности используется около 565 тысяч роботов, «роботов для дома» - 425 тысяч, ежегодно в эксплуатацию вводится порядка 1600 медицинских роботов, 3 тысячи роботов для проведения подводных работ.
Ожидается, что в последующие два-три года количество «роботов для дома» значительно возрастет. Компании, проводившие исследования, предсказывают, что домашний рынок робототехники может быть равен в размере автомобильному рынку. Аналитики считают, что к 2040 году в большинстве домашних хозяйств появятся роботы или, по крайней мере, будет рассматриваться идея их приобретения.
Столь значительное увеличение интереса компаний и частных покупателей к самоходным аппаратам объясняется резким удешевлением последних (к примеру, в период с 1990 г. до 1999 г. средняя цена роботов на рынке США снизилась на 40% [World Robotics 2000/ - United Nations/ Economic Commission for Europe. The International Federation of Robotics 2000/ - P.352] и одновременно существенным расширением их функциональных возможностей (производительности, точности действий, гибкости и простоты настройки). Кроме того, промышленные корпорации в развитых странах стараются компенсировать рост зарплаты (примерно 1% в год) за счет полной автоматизации производственных линий, а массовый рынок пока восторженно принимает практически каждую интеллектуальную модель, что подталкивает разработчиков к ускоренному созданию новых устройств.
По мнению экспертов ВТ нынешний век будет являться веком бытовой робототехники, т.к. в большинстве промышленно-развитых странах, особенно в Японии, каждый год идет 5-6 и более кратное увеличение номенклатуры и числа бытовых роботов.
Общеизвестны полуавтоматические машины для уборки мусора, например, в аэропортах, которые при помощи круговых щеток проходят зону уборки, подметая и убирая в специальный отсек любой мусор.
Недостатком подобных машин является их громоздкость, а главное: требуется оператор - человек для обслуживания каждой машины.
Также известен робот Lukas, разработанный летом 2005 года в университете Högskolan i Halmstad (Швеция) в рамках проекта Mech-Weed «Строительство мобильного сельскохозяйственного робота, способного безошибочно идентифицировать сорняки и автоматически выдергивать их с корнем», спонсируемого Шведским сельскохозяйственным советом (Jordbruksverket) вместе с Фондом фермеров и агротехнических исследований (Stiftelsen Lantbruksforskning).
Функционирует робот следующим образом. На днище машины установлена инфракрасная камера. Она охватывает изображения грядок. Последующая обработка этих снимков бортовым компьютером управляет колесами робота и инструментом для прополки. В пределах грядки «Лукас» отличает полезные растения от бесполезных и вредных при помощи другой камеры, цветные изображения с которой анализирует специальная программа: фиксирует размер, цвет и форму, сравнивает с образом из имеющейся базы.
Недостатками являются:
- узкая специализация;
- ограниченный период использования, т.к. в раннем возрасте (молодые побеги, всходы) многие культуры и сорняки очень похожи друг на друга, например, морковь, кинза, аптечная ромашка, и только через 2-3 недели можно отличить, а пропалывать нужно всегда;
- использование инфракрасного диапазона не совсем убедительно, т.к. в зависимости от окружающей температуры будет изменяться получаемая картинка и не всегда в пользу культурных растений.
Прототипом является «мобильный робот для уборки помещений» (RU №22104492 С2, B25J 5/00, 20.08.2003), содержащий следующие признаки:
- система автоматизированной уборки помещений;
- робот-мусорщик;
- видеоплата, осуществляющая преобразование сигналов видеоизображения в цифровую форму (видеозахвата);
- два приемо-передатчика, один из которых установлен на роботе-мусорщике.
Его недостатком является: неудачное расположение видеокамер (имеются мертвые зоны обзора), отсутствие радиоканала, что снижает его эффективность.
Технической задачей изобретения является расширение эксплуатационных качеств.
Для решения поставленной задачи предлагается система автоматизированной уборки помещений, состоящая из видеокамер и робота-мусорщика, отличающаяся тем, что видеокамеры расположены в верхних углах помещения и через блок видеозахвата и первый приемопередатчик радиоканалом связаны со вторым приемопередатчиком робота-мусорщика; видеокамеры расположены стационарно с секторами обзора в сумме перекрывающих всю поверхность контролируемого пола, а число видеокамер выбрано из условия полного обзора поверхности пола; она снабжена мусоросборщиком, выполненным в виде металлического короба, уставленного на колесное шасси с индивидуальным электроприводом каждого колеса с питанием от аккумуляторной батареи; короб выполнен с двумя отделениями, одно - для мусора, а во втором размещены приемопередатчик, микропроцессор, аккумуляторные батареи, сервисное оборудование, сверху короба размещена антенна приемопередатчика; в нижней части короба расположен выдвижной механический захват для уборки обнаруженного мусора.
На чертеже показана структурная схема системы, на которой изображено: 1-4 - видеокамеры, 5 - блок захвата, 6 - первый микропроцессор (МП), 7, 8 - первый и второй приемопередатчики соответственно, 9 - второй МП, 10 - первый драйвер, 11 - двигатель шасси, 12 - аккумуляторные батареи, 13 - второй драйвер, 14 - самоходная шасси, 15 - двигатели захвата, 16 - механический захват, 17 - мусорный отсек, 18 - блок видеозахвата, 19 - робот-мусорщик.
Система автоматизированной уборки помещений содержит: видеокамеры 1-4, расположенные в верхних углах помещения, блок видеозахвата 18, радиоканал, две приемопередающие антенны, приемопередатчики 7,8, микропроцессоры 6,9, аккумуляторные батареи 12, первый и второй драйверы 10,13, двигатели шасси 11, само шасси 14, механический захват 16 и мусорный отсек 17 со следующими соединениями: вход/выход приемопередающей антенны через приемопередатчик 8 соединен с входом микропроцессора (МП) 9, первый и второй выходы которого соединены с входами первого и второго драйвера 10 и 13 соответственно, выход первого драйвера 10 соединен с электродвигателями 11, выходы которых механически связаны с осями колес шасси 14, а выходы второго драйвера 13 соединены с электродвигателями захвата 15, выходы которых механически связаны с осями исполнительных механизмов механических захватов 16.
Указанные узлы и блоки могут быть выполнены на следующих ЭРЭ и ИМС. Видеокамеры 1-4, например, 9420 Н цветная видеокамера, http://www.ewlon.ru/products.php?gid=20, количество которых определяется размерами помещения и углом обзора конкретной модели видеокамеры. Плата цифровой обработки, например, EW1004C,25 к/с, http://www.ewlon.ru/products.php?gid=19, МП6, например, Pentium IV, 3000 MHz, 50 Gb, RAM 512 Mb, Ethernet 100 MB, Windows 2000. Двигатели 11 и 15, например, электродвигатели стеклоочистителя СЛ136-Э.31.5205, 33.5205, 39.5205 - http://avtocom.com/catalog/item/17.3730.htm, аккумулятор, например, 6 МТС-9, http://www.orenbat.ru/list.phtml?sec=a 6mts9.html. ПМ9, например, AT89C2051 www.atmel.ru драйверы 10 и 13, например, на ИМС JR2130, см. E-mail:ic@averon.ru, приемопередатчики 7 и 8 типа FM RTFQ1 и FM RRFQ1-XXX. Telecontrolli, http://www.telecontrolli.com/eng/default-wproducts.html.
Система работает следующим образом. Видеокамеры 1-4 получают видеоизображение чистой поверхности пола, который нужно убирать от различного мусора: листки бумаги, окурки, пустые пачки из-под сигарет и пр.
Каждая камера передает видеоизображение только своего участка, а все вместе - целую картину помещения, т.е. всего пола (напольной поверхности) со всеми особенностями: выбоины, оттенки света, рисунок линолеума и т.д. Все изображение через плату видеозахвата 5 передается в цифровом коде в первый МП6, где и запоминается, а через приемопередатчики 7 и 8 по радиоканалу поступает во второй МП9, где также запоминается. Система готова к работе. При появлении постороннего предмета картина поверхности этого участка пола меняется видеокамеры 1-4 через блок захвата 5 и приемопередатчик 6 по радиоканалу передают в МП9 робота-мусорщика 19 это измененное изображение, и это изменение фиксируется в МП9 (путем сравнения с первоначальной «картинкой»), который определяет координаты измененного участка и дает команду на движение шасси 14. Робот-мусорщик 19 подъезжает к месту, где находится зафиксированный предмет, классифицируемый как мусор, останавливается над ним, МП9 выдает команду на его захват через драйвер 13 и электродвигатели 15 механическому захвату 16, который захватывает этот мусор и помещает его в мусорный отсек 17. Если же обнаруженный мусор находится в труднодоступном месте, например впритык к стене или в углу, то робот-мусорщик 19 останавливается около этого мусора и другим механическим захватом 16, приспособленным для подобной операции, поднимает его и отправляет его также в мусорный отсек 17.
Это рассмотрен пример, когда в помещении никого нет (людей), например в перерыв или после работы. Когда в помещении находятся сотрудники или посетители, то или робот-мусорщик 19 выключают, либо он автоматически переходит в следующий режим: при обнаружении постороннего предмета-человека, он индефицирует его как мусор и, т.к. человек долго не может находится без движения, то МП9 определяет скорость изменения положения человека и при ее наличии робот-мусорщик 19 не выезжает на это место.
Предусмотрен и третий режим работы - это охранный режим. После окончания работы в офисе, складе, музее и пр., если система обнаруживает изменение рисунка пола, а также наличие движения, то МП9 через приемопередатчик 8 по радиоканалу выдает сигнал тревоги на центральный пульт охранной сигнализации (на чертеже условно не показан).
Питание робота-мусорщика 19 происходит от аккумуляторных батарей 12 (соединения с потребителями условно не показаны), которые по мере надобности подзаряжаются.
Дополнительно радиоканал используется для передачи информации о местонахождении мобильного робота и возможностью управления его передвижением от центрального компьютера.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2019 |
|
RU2703056C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| Средство транспортное роботизированное | 2023 |
|
RU2822947C1 |
| КОМПЛЕКС СРЕДСТВ ВИДЕОНАБЛЮДЕНИЯ И СВЯЗИ МОБИЛЬНОГО ПУНКТА УПРАВЛЕНИЯ | 2011 |
|
RU2468522C1 |
| Автономный пост технического наблюдения для контроля обстановки на охраняемой территории | 2016 |
|
RU2634761C1 |
Изобретение относится к робототехнике и может быть использовано для автоматизированной уборки мусора в жилых помещениях, а также в производственных помещениях, например складских. Технический результат - расширение эксплуатационных возможностей. Система автоматизированной уборки помещений содержит видеокамеры и робот-мусорщик. Видеокамеры расположены в верхних углах помещения и через блок видеозахвата и первый приемопередатчик радиоканалом связаны со вторым приемопередатчиком робота-мусорщика. Робот-мусорщик содержит также приемопередающую антенну, микропроцессор, аккумуляторные батареи, электродвигатели шасси, электродвигатели захвата и сам механический захват, мусорный отсек. При этом вход/выход приемопередающей антенны через приемопередатчик соединен с входом микропроцессора. Видеокамеры расположены стационарно с секторами обзора в сумме перекрывающих всю поверхность контролируемого пола, а число видеокамер выбрано из условия полного обзора поверхности пола. 4 з.п. ф-лы, 1 табл, 1 ил.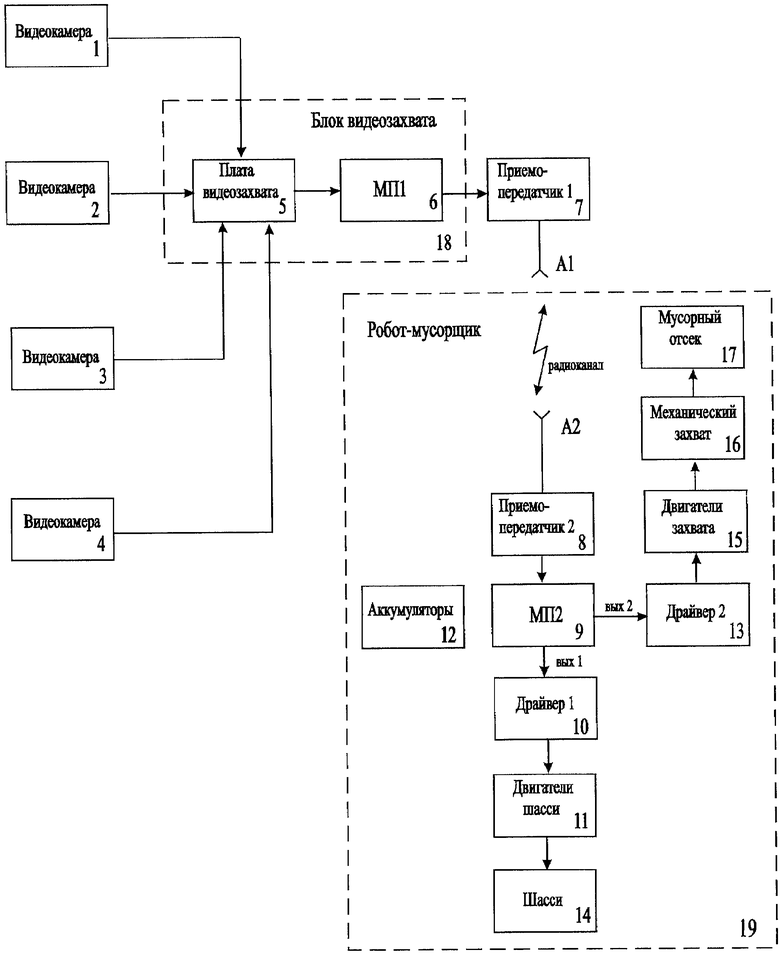
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| СПОСОБ РАБОТЫ РАКЕТНОГО ДВИГАТЕЛЯ И РАКЕТНЫЙ ДВИГАТЕЛЬ РОМАНОВА | 2007 |
|
RU2380563C2 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5787545 A, 04.08.1998 | |||
| МОБИЛЬНЫЙ ПЫЛЕОТСАСЫВАЮЩИЙ АППАРАТ | 1992 |
|
RU2019120C1 |

