перемещения каретки и механической руки выполнен в виде основной и дополнительной зубчато-реечных передач и винтовой передачи с двумя зу бчаты- ми колесами 15 и 16 и гайкой 27, Винт 12 винтовой передачи установлен на каретке 2 и кинематически связан с валом двигателя, а два ее зубчатых колеса 15 и 16 посредством муфт сцепления 21 и 22 установлены с возможностью взаимодействия с зубчатыми колесами 17 и 18 основной и дополнительной зубчато-реечных передач. Ме
1
Изобретение относится к машиностроению, в частности к автоматизации загрузки-выгрузки заготовок в металлорежущих станках.
Цель изо(3ретения - уменьшение ма- териалоемкости манипулятора за счет сокращения двигателей.
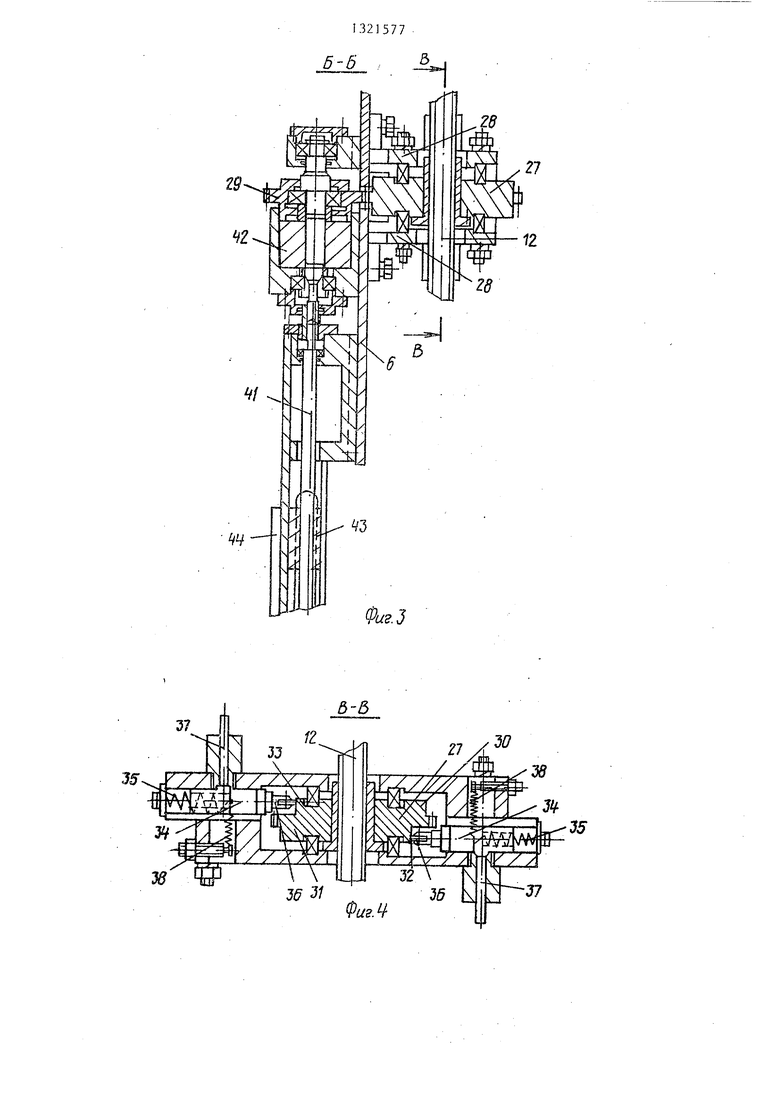
На фиго 1 изобралсен манипулятор, общий вид; на фиг,,2 - вид А на фиг,; на фиГеЗ разрез Б-Б на фиг.1;,на фиг.4 - разрез В-В на фиг.З; на фиг,5 - вид Г на фиг.1; на фиг,6 - разрез Д-Д на фиг,5| на фиг,7 - схема взаимодействия ползунов с гайкой, Промышленньй манипулятор содержит траверсу,1, смонтированную на колоннах (не показаны)J по направляющим которой перемещается каретка 2, причем ход каретки 2 ограничен регулируемыми упорами 3 и 4, закрепленными на траверсе 1 ,
На каретке 2 смонтированы направляющие 5, перпендикулярно направляющим траверсы 1, на которых установ- лена механическая рука 6 с механизмом ее перемещения, несущая захватную головку 7 с захватами 8 и 9 и механизмом ее перемещения, например поворота. Привод перемещения каретки 2 и механической руки 6 состоит из двигателя 10, зубчатой передачи 11, винтовой передачи с двумя зубчатыми колесами и гайкой, винт 1.2 которой установлен в опорах 13„ закрепленных на. каретке 2, и посредством предохранительной муфты 14 связан с зубчатой передачей 11, ведущее колесо которой установлено на вапу двигателя 10,
ханизм перемещения механической руки 6 и захватной головки 7 выполнен в виде винтовой передачи, винт 41 которой установлен на механической руке 6 и кинематически связан посредством муфты сцепления с гайкой 27 винтовой передачи привода перемещения каретки и механической руки. Гайка 43 винтовой передачи снабжена роликом 45, взаимодействующим с пазом j выполненным в рычаге 46 захватной головки 7. 7 ил.
O
5
5
0
Зубчатые колеса 15 и 16 винтовой передачи жестко закреплены на винте 12 и установлены с возможностью взаимодействия посредством соответственно зубчатых колес 17 и 18, зубчатых передач 19 и 20 и муфт 21 и 22 сцепления с зубчатыми колесами 23 и 24 основной и дополнительной зубчато- реечных передач, установленными на каретке 2, а их зубчатые рейки 25 и 26 смонтированы в траверсе 1,
Гайка 27 винтовой передачи привода перемещения каретки 2 и механической руки 6 установлена с возможностью вращения в опорах 28 механической руки 6, при этом на ее внешней поверхности выполнен зубчатьй венец, посредством которого гайка 27 взаимодействует с зубчатым колесом 29, установленным на механической руке 6, Ступица гайки 27 выполнена в виде дйух кулачков 30 и 31, имеющих впадины 32 и 33, Механизм перемещения каретки 2 и механической руки 6 включает два идентичных механизма фиксации, состоящие из ползунов 34 подпружиненных посредством пружин 35 с роликами 36 и толкателей 37 подпружиненных, посредством пружин 38, установленных в опорах 28 механической руки 6 перпендикулярно ползунам 34,
Под действием подпружиненных ползунов 34 промежуточная гайка 27 зафиксирована от поворота относительно продольной оси винта 12 в ту или другую сторону. Ход механической руки 6 ограничен регулируемыми упорами 39 и 40, установленными на каретке 2 .
Механизм перемещения (поворота) захватной головки 7 выполнен в виде винтовой передачи, винт 41 которой установлен на механической руке 6 и связан с гайкой 27, установленной на винте 12 винтовой передачи привода перемещения каретки 2 и механической руки 6, посредством муфты 42 сцеп- ления и зубчатого колеса 29, а его гайка 43 жестко связана с кронштейном 44, несущим ролик 45, взаимодействующий с пазом, выполненным в рычаге 46 захватной головки 7, щарнирно установленной на валу 47 основания механической руки.
Манипулятор работает следующим образом.
Манипулятор находится в исходном положении, при этом каретка 2 контактирует с регулируемым упором 4, закрепленным на траверсе 1, механическая рука 6 находится в крайнем верхнем положении, верхняя опора 28 кон- тактирует с регулируемым упором 39, ролик 36 левого механизма фиксации под воздействием толкателя 37 на ползун 34 выведен из впадины 32 кулачка 30 гайки 27, заготовка находится в захвате 8, при этом ролик 36 правого механизма фиксации подпружиненного ползуна 34 контактирует с наружной поверхностью кулачка 31 гайки 27.
При поступлении команды от станка либо другого обслуживаемого оборудования включается двигатель 10 и винт 12 посредством зубчатой передачи 11, а вместе с ним зубчатые колеса 15 и 16 начинают вращаться, например, про тив часовой стрелки, причем винт 12 имеет правую резьбу.
Гайка 27 также начинает вращаться вместе с винтом 12 против часовой стрелки, при этом ролик 36 правого механизма фиксации подпружиненного ползуна 34 обкатывается по наружной поверхности кулачка 31 до впадины 33 далее вращение гайки 27 прекращается и механическая рука 6с захватами 8 и 9 перемещается вниз. Одновременно ползун 34 левого механизма фиксации под действием пружины 35 начинает перемещать ролик 36 во впадину 32 кулачка 30 гайки 27 и толкатель 37 в крайнее верхнее положение. Механическая рука 6 перемещается вниз, толкатель 37 правого механизма фиксации
доходит до упора 40, При дальнейшем движении механической руки 6 вниз относительно зафиксированного в неподвижном положении упором 40 толкателя 37 последний, воздействуя на ползун 34, выводит ролик 36 из впадины 33 кулачка 31 гайки 27, При этом нижняя опора 28 доходит до упора 40, гайка 27 начинает вращаться совместно с винтом 12 против часовой стрелки, ролик 36 левого механизма фиксации начинает обкатываться по кулачку 30 и механическая рука 6 с захватами 8 и 9 останавливается. Причем захват 9 оказывается на оси. цент7 ров обработанной детали,
Вийт 2 продолжает вращаться про тив часовой стрелки, подается команда (датчики, управляющие работой манипулятора, не показаны) на включение муфты 22 сцепления, движение с винта 12 посредством зубчатых колес 16 и 18 муфты 22 cцeплeшiя и зубчатой передачи 20 передается на зубчатое колесо 24, которое, обкатываясь по зубчатой рейке 26, перемещает каретку 2 по траверсе 1, а вместе с ней и механическую руку 6 с захватами 8 и 9 в крайнее левое положение до упора 3, при этом муфта 22 сцепления отключается и каретка 2 останавливается. Происходит зажим обработанной детали захватом 9, Затем подается команда на включение муфты 2I сцепления, движение с винта 12 посредством зубчатых колес 15 и 17, ryфты 21 сцепления, зубчатой передачи 19 передается на зубчатое колесо 23, которое, обкатываясь по зубчатой рейке 25, перемещает каретку 2 по траверсе 1 , а вместе с ней и механическую руку 6 в крайнее правое положение до упора 4, при этом муфта 21 сцепления от клю- чается и каретка 2 останавливается, Затем подается команда на включение муфты 42 сцепле.ния, движение с гайки 27 посредством зубчатого колеса 29, муфты 42 сцепления передается на винт 41, причем последний начинает вращаться по часовой стрелке, так как выполнен с левой резьбой.
Гайка 43 перемещается по винту 41 вниз, а вместе с ней и кронштейн 44 с роликом 45, При этом ролик 45, обкатываясь в пазу рычага 46, разворачивает последнуш, а вместе с ним и захватную головку 7 с захватами 8 и 9 относительно вала 47, установленного на основании механической руки 6, Захват 8 с заготовкой устанавливается на оси центров обрабатывающего станка Подается команда на отключение муфты 42 сцепления и включение муфты 22 сцепленияр при этом вращени винта 4 прекращается и начинает вращаться зубчатое колесо 24, которое, обкатываясь по зубчатой рейке 26, перемещает каретку 2 по траверсе 1 в крайнее левое положение до регулируемого упора 3, затем муфта 22 сцепления о т кл юч ае т ся,
Происходит залсим заготовки станком, разжим заготовки захватом 8, подается команда на включение муфты 21 сцепленияJ посредством зубчатого колеса 23 каретка 2 перемещается в крайнее правое положение до регулируемого упора 4, при этом муфта 21 сцепления отключается и каретка 2 останавливается 6
Затем двигатель 10 включается на реверс. Винт 12 вращается по часовой стрелке, при этом ролик 36 левого механизма фиксации подпружиненного ползуна 34, обкатываясь по наружной поверхности кулачка 30 гайки 27, попадает во впадину 32 указанного кулачка вращение гайки 27 прекращается и механическая рука 6 с захватами 8 и 9 перемещается в крайнее верхнее положение. Ползун 34 правого механизма фиксации под действием 35 начинает перемещать ролик 36 во впадину 33 кулачка 31 гайку 27 и толкатель 37 в крайнее нижнее положение Механическая рука 6 перемещается вверх, толкатель 37 левого механизма фиксации доходит до регулируемого упора 39, При дальнейшем движении механической руки 6 вверх относительно зафиксированного в неподвижном положении регулируемым упором 39 толкателя 37 последний, воздействуя на ползун 34, выводит ролик 36 из впадины 32 кулачка 30 гайки 27, при этом верхняя опора 28 доходит до упора 39, гайка 27 начинает вращаться совместно с винтом 12 по часовой стрелке, ролик 36 правого механизма фиксации подпружиненного ползуна 34 начинает обкатываться механическая рука 6 и 9 останавливается
Подается команда на включение муфты 21 сцепления, посредством зубчатого колеса 23 каретка 2 перемещается
по кулачку 31 и с захватами 8
в крайнее левое положение до регулируемого упора 3, муфта 21 сцепления отключается, и каретка 2 останавливается. Подается команда на рагжим
захвата 9 и на включе.ние муфты 22 сцепления. При этом каретка 2 посредством зубчатого колеса 24 перемещается в крайнее правое положение, а деталь остается на лотке (не показан),
При достижении кареткой 2 регулируемого упора 4 муфта 22 сцепления отключается, каретка 2 останавливается, одновременно включается муфта 42 сцепления, начинает вращаться винт
41 против часовой стрелки, гайка 43 перемещается по винту 41 вверх, а вместе с ней и кронштейн 44 с роликом 45, . При этом ролик 45, обкатываясь в пазу рычага 46, разворачивает последний, а вместе с ним и захватную головку 7 с захватами 8 и 9 относительно оси вала 47, установленного на основании механической руки б, в первоначальное положение
и муфта 42 сцепления отключается.
Вращение винта 41 прекращается. Пода-, ется команда на включение муфты 21 сцепления, посредством зубчатого колеса 23 каретка 2 перемещается в
крайнее левое положение до регулируемого, упора 3j муфта 21 сцепления отключается, и каретка 2 останавливает- сЯь Происходит зажим очередной заготовки захватом 8 на лотке., включается
муфта 22 сцепления, при этом каретка 2 посредством зубчатого колеса 24 перемещается в крайнее правое положение до регулируемого упора 4, муфта 22 сцепления отключается и каретка
2 занимает исходное положение.
Далее цикл работы манипулятора повторяется 6
Исходными положениями манипулятора могут быть любые кравшие положения
каретки и механической руки, при этом : цикл работы манипулятора может изменяться.
Формула изобретения
50
Манипулятор, содержащий траверсу, смонтированную на колоннах, каретку, установленную на направляющих траверсы, с приводом ее перемещения, включающим двигатель и основную зубчато-, 5-5 реечную передачу, зубчатое колесо которой закреплено на каретке, а рейка- на траверсе, механическую руку и захватную головку с соответствующими меха7,32
низмами их перемещений, о т л и - ч ающий с я тем, что, с целью уменьшения материалоемкости, он снабжен муфтами сцепления, а привод перемещения каретки и механической руки снабжен идентичной дополнительной зубчато-реечной передачей и винтовой передачей с двумя зубчатыми колесами и гайкой, винт которой установлен на каретке и кинематически связан с валом двигателя, а ее зубчатые колеса установлены с возможностью взаимо- действи с зубчатыми колесами основной и дополнительной зубчато-реечной передач посредством соответствующих муфт сцепления, причем механизм перемещения механической руки и захватной головки выполнен также в виде
78
винтовой передачи, винт которой установлен на корпусе механической руки и кинематически связан посредством муфты сцепления с гайкой винтовой
передачи привода перемещения каретки и механической руки, а гайка винтовой передачи механизма перемещения захватной головки установлена с возможностью поступательного перемещения и снабжена роликом, взаимодействующим с пазом, выполненным на захватной головке, при этом на ступице гайки винтовой передачи привода перемещения каретки и механической руки вьтолнены кулачки, с которыми взаимодействуют ползуны дополнительно введенный двух идентичных механизмов фик сации,


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| Промышленный робот | 1982 |
|
SU1108005A1 |
| СТАНОК ДЛЯ НАМОТКИ ПРОВОЛОКИ | 1995 |
|
RU2104101C1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ СКОРОСТНОЙ НАМОТКИ НА КАТУШКИ НИТЕОБРАЗНЫХ МАТЕРИАЛОВ | 1972 |
|
SU360128A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ ДЛЯ ВОССТАНОВЛЕНИЯ ПРОФИЛЯ БАНДАЖА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 1996 |
|
RU2107586C1 |
| Манипулятор | 1986 |
|
SU1371851A1 |


Изобретение относится к устройствам для автоматической загрузки- выгрузки заготовок в металлорежупр1х- станках. Целью изобретения является уменьшение материалоемкости манипулятора за счет сокращения двигателей захватной головки. Для этого привод ВидА W -1в-/ 1(Л 00 ND СЛ vj Фиг. 2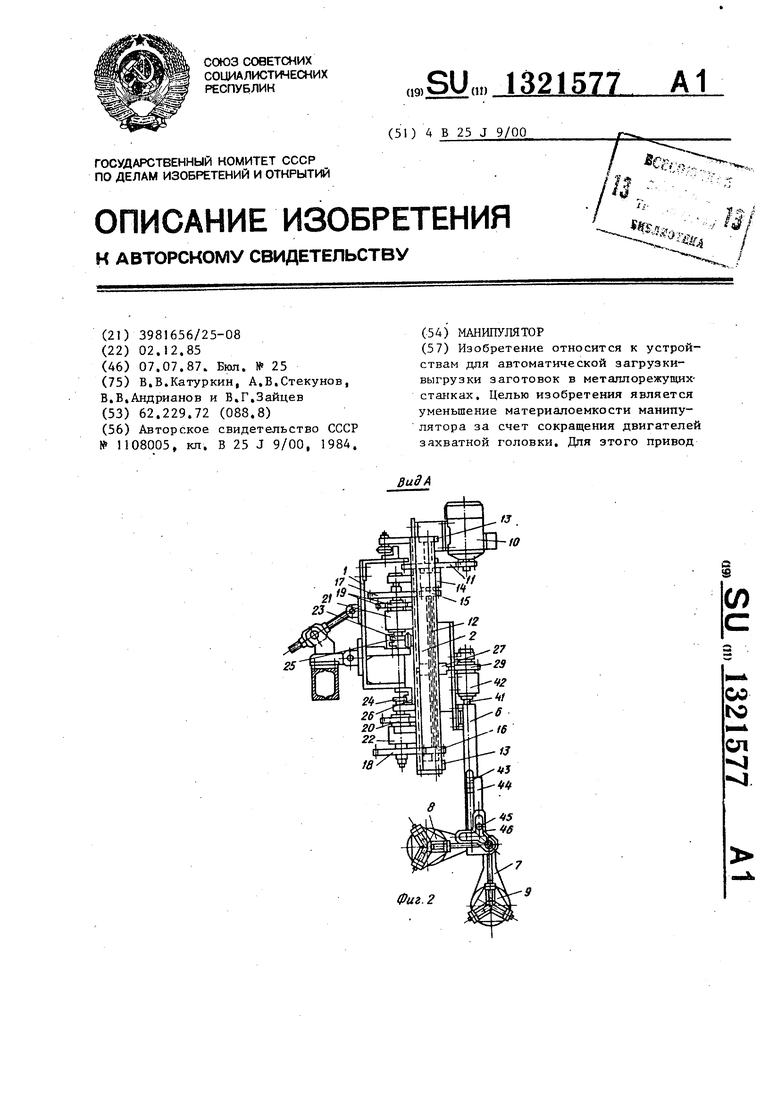
12
Ьг.З
37
35
37
ФизМ
W4J
Фиг.5
Фиг. 6
f anpof/fe/fue вращения еоини
JO
Направление
перепещемия
ползуна
3d
31
HanpaSfleuut nepefievieHuit ползуна
X
fiii.J
Редактор В.Петраш
Составитель А.Ширяева
Техред И.Попович Корректор С.Шекмар
Заказ 2707/10Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб, , д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Промышленный робот | 1982 |
|
SU1108005A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
