УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в целом относится к операциям подземного бурения, а более конкретно, к измерению скорости вращения вала.
Углеводороды, такие как нефть и газ, как правило, добывают из подземных формаций, которые могут быть расположены на суше или в море. Выполнение подземных работ и способы, применяемые для извлечения углеводородов из подземной формации, сложны. Обычно подземные работы предполагают выполнение ряда различных этапов, таких как, например, бурение ствола скважины в требуемом месте расположения скважины, обработка скважины для оптимизации добычи углеводородов и осуществление необходимых этапов для добычи и переработки углеводородов из поземной формации.
В некоторых случаях наклонно направленного бурения для обеспечения вращения бурового долота применяется забойный гидротурбинный двигатель в противоположность способу, при котором вращение передается с поверхности посредством всей бурильной колонны, применяемому при обычных буровых работах. Это может быть применено для сбора сведений о формации, в которой будет осуществляться бурение, и о самой операции бурения, когда гидравлический забойный двигатель запущен и осуществляет бурение. Такие сведения могут применяться для контроля за ходом операции бурения и выполнения регулировок для успешного завершения операции.
ФИГУРЫ
Некоторые конкретные типовые варианты осуществления изобретения могут быть лучше поняты со ссылкой, в частности, на нижеследующее описание и прилагаемые чертежи.
На фиг. 1 представлена схема типовой буровой системы, соответствующей аспектам настоящего изобретения.
На фиг. 2 представлена схема, изображающая типовую систему управления информацией, соответствующую аспектам настоящего изобретения.
На фиг. 3 представлена элементная схема типовой системы, соответствующей аспектам настоящего изобретения.
На фиг. 4А, 4В и 4С изображены типовые тороиды, соответствующие аспектам настоящего изобретения.
На фиг. 5 представлена блок-схема типового способа, соответствующего аспектам настоящего изобретения.
Несмотря на то, что варианты осуществления настоящего изобретения были изображены и описаны в отношении иллюстративных вариантов осуществления изобретения, эти иллюстративные варианты не предполагают ограничение изобретения, и такое ограничение не подразумевается. Раскрываемый объект изобретения позволяет создавать множество модификаций, изменений и эквивалентов по форме и функциональности, которые смогут предложить специалисты в рассматриваемой области техники, у которых есть возможность ознакомиться с настоящим описанием. Изображенные и описанные варианты осуществления настоящего изобретения являются лишь примерами и не исчерпывают объема раскрытия.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В контексте настоящего описания система управления информацией может содержать любые устройства или совокупность устройств, выполненных с возможностью вычисления, систематизации, обработки, передачи, получения, извлечения, создания, перенаправления, хранения, отображения, выдачи, обнаружения, записи, воспроизведения, управления или любых форм применения информации, интеллекта, или данных для бизнеса, целей управления, научных или других целей. Например, система управления информацией может представлять собой персональный компьютер, сетевое устройство хранения данных или любое другое подходящее устройство, которое может отличаться по размеру, форме, производительности, функциональности и цене. Система управления информацией может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов, производящих обработку, таких как центральный процессор (ЦП) или логическое устройство управления аппаратным или программным обеспечением, ПЗУ и/или другие типы энергонезависимого запоминающего устройства. Дополнительные компоненты системы управления информацией могут включать одно или большее количество дисковых запоминающих устройств, один или большее количество сетевых портов для обмена данными с внешними устройствами, а также с различными устройствами ввода и вывода (I/O), такими как клавиатура, мышь и монитор. Система управления информацией может также содержать одну или большее количество шин, выполненных с возможностью обеспечения обмена данными между различными компонентами аппаратного обеспечения. Она также может содержать одну или большее количество интерфейсных устройств, способных передавать один или большее количество сигналов на контроллер, привод или подобное устройство.
Для целей данного раскрытия машиночитаемый носитель может содержать любое устройство или совокупность устройств, способных хранить данные и/или команды в течение определенного периода времени. Машиночитаемый носитель может представлять собой, например, без ограничения, носитель информации, такой как запоминающее устройство с прямым доступом (например, накопитель на жестких дисках или накопитель на гибких магнитных дисках), запоминающее устройство с последовательным доступом (например, накопитель на магнитной ленте), компакт-диск, диск CD-ROM, диск DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) и/или флэш-память; а также средства коммуникации, такие как провода, оптические волокна, микроволны, радиоволны и другие электромагнитные и/или оптические носители; и/или любую комбинацию вышеперечисленного.
Иллюстративные варианты осуществления настоящего изобретения подробно описаны в этом документе. Для ясности в настоящем описании могут быть приведены не все признаки фактической реализации. Конечно же, следует понимать, что в ходе разработки любого такого фактического варианта осуществления для достижения конкретных целей реализации предлагается множество вариантов реализации - конкретные решения, которые будут отличаться от одной реализации к другой. При этом следует иметь в виду, что ход такой разработки может быть сложным и продолжительным, но, тем не менее, при ознакомлении с настоящим раскрытием будет рутинным делом для среднего специалиста в данной области техники.
Для облегчения понимания настоящего изобретения приводятся нижеследующие примеры некоторых вариантов осуществления. Следующие примеры ни в коей мере не следует воспринимать как ограничивающие или определяющие объем изобретения. Варианты осуществления настоящего изобретения применимы для горизонтальных, вертикальных, отклоненных или других нелинейных стволов скважины в подземной формации любого типа. Варианты осуществления применимы для нагнетательных скважин, а также эксплуатационных скважин, включая нефтегазоносные скважины. Варианты осуществления могут быть реализованы с применением устройства, подходящего для тестирования, извлечения и взятия проб вдоль секций формации. Варианты осуществления могут быть реализованы с помощью устройств, которые, например, могут быть транспортированы через проточный канал в колонне труб или с помощью каротажного кабеля, тросовой проволоки, колонны гибких труб, скважинного робота и т.п.
В контексте настоящего описания термины «соединение» или «соединения» предполагают непрямое либо прямое соединение. Таким образом, если первое устройство соединено со вторым устройством, такое соединение может быть осуществлено через прямое соединение или через непрямое механическое или электрическое соединение посредством других устройств и соединений. Аналогично, термин «соединен с возможностью обмена данными», применяемый в данном документе, предполагает прямое или непрямое коммуникационное соединение. Такое соединение может быть проводным или беспроводным соединением, таким как, например, Ethernet или ЛВС (LAN). Данные проводные или беспроводные соединения хорошо известны специалистам в данной области техники, поэтому они не будут подробно рассматриваться в данном документе. Таким образом, если первое устройство соединено со вторым устройством с возможностью обмена информацией, такое соединение может быть осуществлено через прямое соединение или через непрямое соединение с возможностью обмена данными посредством других устройств и соединений.
Настоящее изобретение в целом относится к операциям подземного бурения, а более конкретно, к стабилизации бурового долота, бурильной колонны и/или скважинных приборов с целью предотвращения поперечных колебаний и неравномерного вращения.
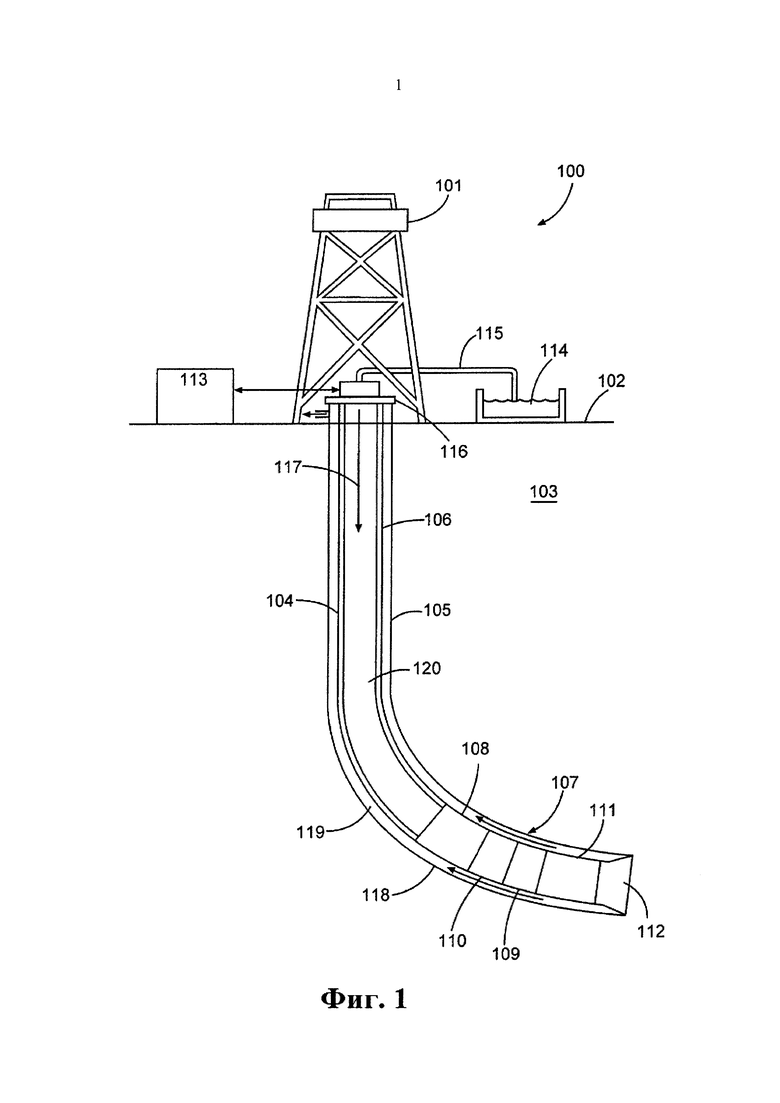
На фиг. 1 представлена схема, иллюстрирующая типовую систему 100 наклонно направленного бурения, соответствующую аспектам настоящего изобретения. В данном контексте система наклонно направленного бурения может представлять собой систему подземного бурения, в которой по меньшей мере один вертикальный угол или азимутальная ориентация бурового долота устанавливается намеренно с отклонением с целью соприкосновения, проникновения или пересечения объекта. Например, системы наклонно направленного бурения могут применяться для проникновения в подземный пласт для добычи углеводородов. Системы наклонно направленного бурения также могут применяться для следования по существующей буровой скважине внутри формации или для пересечения существующей скважины, в которой произошел выброс.
В изображенном варианте осуществления система 100 наклонно направленного бурения содержит буровую установку 101, расположенную на поверхности 102 над формацией 103. Хотя на фиг. 1 буровая установка 101 изображена на суше, буровая установка 101 может применяться в море, при этом поверхность 102 содержит буровую платформу. Буровая установка 101 может быть соединена с буровой компоновкой 104, которая производит бурение буровой скважины 105 в формации 103. Буровая компоновка 104 может содержать бурильную колонну 106, забойное оборудование (ВНА) 107 и кривой переводник 108. Бурильная колонна 106 может содержать множество труб, соединенных между собой посредством резьбовых соединений. Забойное оборудование 107 может содержать одну или большее количество систем 109 каротажа скважины в процессе бурения (LWD) или проведения измерений во время бурения (MWD), систему телеметрии, гидравлический забойный двигатель 111 с окружающим блоком и буровое долото 112. Кривой переводник 108 может содержать соединение с постоянным или регулируемым углом, позволяющим регулировать по меньшей мере одно из вертикального угла и азимутального направления буровой компоновки 104 в целом и бурового долота 112 в частности. В некоторых вариантах осуществления кривой переводник 108 может быть встроен в забойное оборудование 107 или установлен в другом месте на бурильной колонне 106. В некоторых вариантах осуществления система 100 наклонно направленного бурения может содержать гидравлический забойный двигатель, который содержит регулируемый кривой переводник, отличный от отдельного кривого переводника 108, показанного на фиг. 1.
Система 109 каротажа/проведения измерений во время бурения может содержать скважинные измерительные или каротажные приборы, включающие магнитометры, акселерометры, антенны и т.д. Система 110 телеметрии может обеспечивать канал обмена данными между системой 109 каротажа/проведения измерений во время бурения и другой скважинной системой и блоком 113 управления работой забойного оборудования. Например, система 110 телеметрии может содержать генератор импульсов давления в столбе бурового раствора, который взаимодействует с блоком 113 управления работой забойного оборудования с помощью серии импульсов давления в буровом растворе в буровой скважине 105.
В показанном варианте осуществления блок 113 управления работой забойного оборудования может содержать систему управления информацией. В данном контексте системы управления информацией могут содержать любые устройства или совокупность устройств, выполненных с возможностью вычисления, систематизации, обработки, передачи, получения, извлечения, создания, перенаправления, хранения, отображения, выдачи, обнаружения, записи, воспроизведения, управления или любых форм применения информации, интеллекта или данных для бизнеса, целей управления, научных или других целей. Например, система управления информацией может представлять собой персональный компьютер, сетевое устройство хранения данных или любое другое подходящее устройство, которое может отличаться по размеру, форме, производительности, функциональности и цене. Система управления информацией может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов, производящих обработку, таких как центральный процессор (ЦП) или логическое устройство управления аппаратным или программным обеспечением, постоянное запоминающее устройство (ПЗУ) и/или другие типы энергонезависимого запоминающего устройства. Дополнительные компоненты системы управления информацией могут включать одно или большее количество дисковых запоминающих устройств, один или большее количество сетевых портов для обмена данными с внешними устройствами, а также с различными устройствами ввода и вывода (I/O), такими как клавиатура, мышь и монитор. Система управления информацией может также содержать одну или большее количество шин, выполненных с возможностью обеспечения обмена данными между различными компонентами аппаратного обеспечения.
В процессе бурения буровой раствор может закачиваться из резервуара 114 в буровой колодец 120 буровой компоновки 104 через трубопровод 115. После введения в буровой колодец 120 буровой компоновки 104 буровой раствор может проходить от поверхности, как показано стрелкой 117. Буровой раствор может выходить из буровой компоновки 104 через промывочные каналы внутри бурового долота 112. При выведении бурового раствора из бурового долота 112 он может смазывать и охлаждать режущую поверхность бурового долота 112 и выносить выбуренную породу от бурового долота 112 на поверхность 102. Буровой раствор 115 может протекать к поверхности 102, как показано стрелкой 118, внутри затрубного пространства 119 между буровой компоновкой 104 и стенкой 105 буровой скважины.
Гидравлический забойный двигатель 111 с окружающим блоком может содержать по меньшей мере один элемент внутри потока бурового раствора 117, который преобразует энергию потока бурового раствора 117 во вращательное движение. Например, гидравлический забойный двигатель 111 с окружающим блоком может содержать турбину, которая вращается под воздействием потока жидкости. Турбина может приводить в движение выходной вал, который может быть соединен непосредственно или опосредованно через узлы зубчатой передачи и другие элементы привода с буровым долотом 112. Соответственно, когда буровой раствор закачивается в буровую компоновку 104, буровое долото 112 может вращаться и врезаться в формацию 103. В частности, при вращении бурового долота 112 с гидравлическим забойным двигателем 111 с окружающим блоком, а не с бурильной колонной 106 азимутальная ориентация кривого переводника 108 и бурового долота 112 может оставаться по существу постоянной во время бурения буровой скважины 105. Однако при низкой скорости проходки, осуществляемой буровой компоновкой 104, часть бурильной колонны 106 может становиться неподвижной, что приводит к возникновению статического трения между бурильной колонной 106 и стенкой буровой скважины 105. Прежде чем может быть продолжено бурение, следует преодолеть это статическое трение.
В соответствии с аспектами настоящего изобретения возникновения статического трения в основном можно избежать или уменьшить его за счет непрерывного вращения бурильной колонны 106. В некоторых вариантах осуществления подводимый крутящий момент может быть оптимизирован таким образом, чтобы его величина была не меньшей минимального подводимого крутящего момента, требуемого для непрерывного вращения бурильной колонны 106 при отсутствии вращения бурового долота 112, что могло бы изменить его азимутальную ориентацию. Альтернативно может быть сообщен оптимизированный крутящий момент/вращение в первом направлении и во втором направлении для обеспечения по существу непрерывного вращения без вращения бурового долота. В некоторых вариантах осуществления минимальный подводимый крутящий момент может быть сообщен бурильной колонне 106 посредством верхнего привода 116, соединенного с бурильной колонной 106. Верхний привод 116 может быть соединен с блоком 113 управления работой забойного оборудования и может содержать двигатель, который сообщает бурильной колонне 106 крутящий момент, обусловленный по меньшей мере частично сигналом управления, генерируемым блоком 113 управления работой забойного оборудования. Например, верхний привод 116 может содержать контроллер, который принимает сигнал управления от блока 113 управления работой забойного оборудования и обеспечивает сообщение двигателем, расположенным внутри верхнего привода 116, определенного крутящего момента бурильной колонне 106. В других вариантах осуществления сигнал управления от блока 113 управления работой забойного оборудования может управлять двигателем непосредственно. В других вариантах осуществления сигнал управления может быть сгенерирован системой управления информацией, входящей в состав верхнего привода 106.
На фиг. 2 представлена блок-схема, изображающая типовую систему 200 управления информацией в соответствии с аспектами настоящего раскрытия. Система 200 управления информацией может применяться, например, в качестве части системы или блока управления для буровой компоновки. Например, оператор буровой установки может взаимодействовать с системой 200 управления информацией для изменения параметров режима бурения или для выдачи сигналов управления на буровое оборудование, соединенное с возможностью обмена данными с системой 200 управления информацией. Система 200 управления информацией может содержать процессор или ЦП 201, соединенный с возможностью обмена данными с контроллером-концентратором запоминающего устройства или северным мостом 202. Контроллер-концентратор 202 запоминающего устройства может содержать контроллер запоминающего устройства для передачи информации на различные компоненты запоминающего устройства системы или от них в пределах системы управления информацией, такие как ОЗУ 203, элемент 206 запоминающего устройства и накопитель 207 на жестких дисках. Контроллер-концентратор 202 запоминающего устройства может быть соединен с ОЗУ 203 и графическим процессором 204. Контроллер-концентратор 202 запоминающего устройства также может быть соединен с контроллером-концентратором ввода-вывода или южным мостом 205. Концентратор 205 ввода-вывода соединен с элементами запоминающего устройства вычислительной системы, содержащей элемент 206 запоминающего устройства, который может содержать флэш-ПЗУ, которое содержит базовую систему ввода-вывода (BIOS) вычислительной системы. Концентратор 205 ввода-вывода также соединен с накопителем 207 на жестких дисках вычислительной системы. Концентратор 205 ввода-вывода также может соединен с ультрабольшой интегральной схемой 208 ввода-вывода, которая соединена с несколькими портами ввода-вывода вычислительной системы, включая порты для подключения клавиатуры 209 и мыши 210. Система 200 управления информацией может быть дополнительно соединена (с возможностью обмена данными) с одним или большим количеством элементов буровой компоновки посредством интегральной схемы 208.
В некоторых вариантах осуществления настоящего изобретения предлагаются способы и системы для измерения скорости вращения гидравлического забойного двигателя 111 с окружающим блоком в зависимости от расположения набора для присоединения тороидов внутри бурильной колонны.
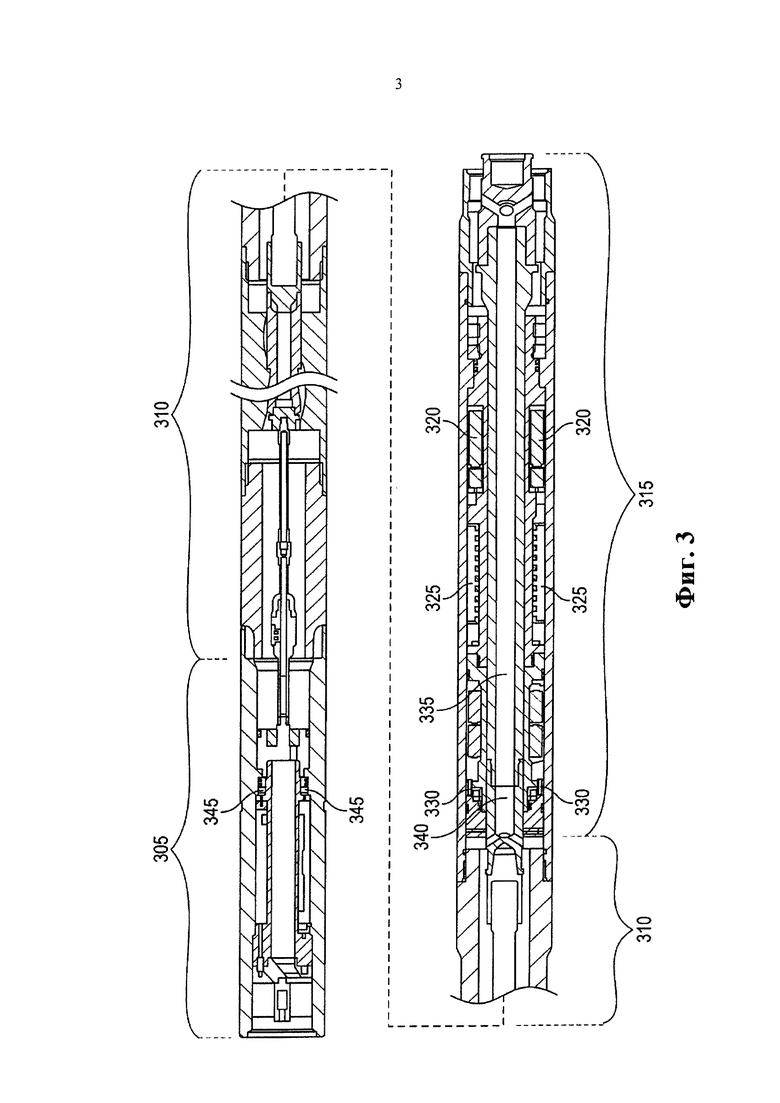
На фиг. 3 представлена элементная схема типового гидравлического забойного двигателя 111 с окружающим блоком. Типовой гидравлический забойный двигатель 111 с окружающим блоком содержит верхнюю секцию 305, нижнюю секцию 315 и силовую секцию 310.
Силовая секция 310 также может упоминаться как гидравлический забойный двигатель и содержит ротор гидравлического забойного двигателя. Типовые роторы гидравлического забойного двигателя представляют собой винтовую охватываемую металлическую конструкцию, помещенную внутрь корпуса (например, статора), который также является винтовым (охватывающим), но который имеет одну дополнительную лопасть. Когда буровой раствор проходит вниз в корпус, это вызывает вращение ротора и поворот вала 335 гидравлического забойного двигателя. Вал гидравлического забойного двигателя проходит через нижнюю секцию 315 в буровое долото 112.
В одном типовом варианте осуществления гидравлический забойный двигатель 111 с окружающим блоком находится в 6,75-дюймовой секции. В некоторых типовых вариантах осуществления нижняя секция 310 содержит или соединяется с одним или большим количеством датчиков. Типовые датчики содержат один или большее количество датчиков 320 гамма-излучения. Типовые варианты реализации включают четыре датчика гамма-излучения, ориентированных в разных направлениях для обнаружения гамма-лучей вокруг гидравлического забойного двигателя 111. Другие типовые варианты реализации включают один или большее количество датчиков 325 наддолотной инклинометрии для определения вертикального угла гидравлического забойного двигателя 111 с окружающим блоком или долота в процессе бурения. Типовые датчики 325 наддолотной инклинометрии представляют собой один или большее количество трехплоскостных акселерометров. Другие типовые датчики включают один или большее количество сильно сфокусированных ультразвуковых датчиков для получения отраженных акустических изображений стенки ствола буровой скважины, электродов для измерения слабых колебаний удельного электрического сопротивления формации вокруг буровой скважины, небольших высокочастотных антенн, чувствительных к локальному вторичному электромагнитному полю формации или к полям, генерируемым в результате осуществления процесса бурения, близкодействующих сильно сфокусированных датчиков рассеяния гамма-излучения или рентгеновского излучения, высокочувствительных химических датчиков и микроэлектромеханических систем (MEMS).
Вал 335 гидравлического забойного двигателя проходит через тороид 330 (в нижней секции 315). Каждый из тороидов 330 и 345 имеет обмотку с определенным количеством витков провода. В некоторых типовых вариантах осуществления каждый из тороидов 330 и 345 имеет обмотку с одинаковым количеством витков провода. В типовых вариантах осуществления на обоих тороидах 330 и 345 содержится по 125 витков провода. Другие типовые варианты осуществления могут содержать большее или меньшее количество витков провода на тороидах 330 и 345. Выходы одного или большего количества датчиков, расположенных в нижней секции 315 или соединенных с нижней секцией 315, выводят сигналы на тороид 330. Тороид 330 при повороте индуцирует сигнал в тороиде 345. В некоторых типовых вариантах осуществления сигнал, индуцированный в тороиде 345, обрабатывается одним или большим количеством процессоров по всей длине бурильной колонны. В других типовых вариантах осуществления сигнал, индуцируемый в тороиде 345, передается на блок 113 управления работой забойного оборудования для дальнейшего анализа или обработки.
В типовых вариантах осуществления тороидов 330 и 345 применяется равномерный шаг витков провода на тороидах 330 и 345. Другие типовые варианты осуществления настоящей системы, однако, предполагают применение неравномерной обмотки на одном или обоих тороидах 330 и 345. В этих вариантах осуществления магнит 340 прикрепляется к валу 335 гидравлического забойного двигателя внутри или вблизи тороида 330 таким образом, что поле магнита 340 соединяется с полем тороида 330 и при повороте изменяет сигнал, который индуцируется в тороиде 345 тороидом 330 таким способом, который позволяет определять скорость вращения. Поэтому типовые системы выполняют обработку сигнала для определения изменения сигнала, индуцируемого в тороиде 345 с помощью сигнала в тороиде 330 для определения скорости вращения вала 335 гидравлического забойного двигателя. Типовые варианты осуществления тороида 345 показаны на фиг. 4А, 4В и 4С.
На фиг. 4С представлен типовой тороид 425 с обмоткой в 125 витков провода, разделенной на три сегмента 430, 435 и 440, равномерно распределенные по тороиду 425. В случае вращения магнита внутри тороида 425 со скоростью приблизительно 1100 оборотов в минуту (об/мин) типовой тороид 425 выдает выходной сигнал приблизительно в 150 мВ от пика к пику с частотой, в три раза большей, чем число оборотов в минуту магнита. Типовой блок 113 управления работой забойного оборудования определяет число оборотов в минуту вала 335 гидравлического забойного двигателя на основании частоты измеренного сигнала и дополнительно в зависимости от конфигурации обмотки тороида. В этом случае блок 113 управления работой забойного оборудования распознает, что при каждом вращении вала 335 гидравлического забойного двигателя генерируется сигнал с трехкратной частотой.
На фиг. 4D представлен типовой тороид 445 с обмоткой в 125 витков провода, разделенной на три сегмента 450, 460 и 465, расположенные под углами 0, 60 и 180 градусов. В такой конфигурации система может определять как скорость вращения, так и направление вращения. В такой конфигурации интервал между импульсами составит Т, 2Т и 3Т при вращении по часовой стрелке или 3Т, 2Т и Т при вращении против часовой стрелки. Типовые варианты осуществления блока 113 управления работой забойного оборудования включают исполняемые команды для определения частоты следования импульсов в дополнение к синхронизации импульсов. Таким образом, типовой блок 113 управления работой забойного оборудования определяет как скорость вращения вала 335 гидравлического забойного двигателя, так и направление вращения вала 335 гидравлического забойного двигателя.
В других вариантах реализации три или большее количество магнитов может быть установлено на валу 335 гидравлического забойного двигателя внутри нижнего тороида 330. В этом случае нижний тороид 330, который содержит односегментную обмотку, например обмотки, показанные на фиг. 4А или 4В, способен определять как скорость вращения, так и направление вращения вала 335 гидравлического забойного двигателя.
На фиг. 4А показан типовой тороид 405 с конфигурацией, предполагающей применение половиной обмотки, в которой сегмент 410 содержит 125 витков провода, намотанного вокруг приблизительно половины тороида 405. В типовых вариантах осуществления тороид 410 может выдавать приблизительно 100 мВ от пика к пику, когда магнит вращается внутри тороида 410. Частота выходного сигнала тороида 405 равна частоте вращения магнита. Типовой блок 113 управления работой забойного оборудования определяет число оборотов в минуту вала 335 гидравлического забойного двигателя на основании частоты измеренного сигнала и дополнительно в зависимости от конфигурации обмотки тороида. В этом случае блок 113 управления работой забойного оборудования распознает, что при каждом вращении вала 335 гидравлического забойного двигателя генерируется сигнал с той же частотой.
На фиг. 4В показан типовой тороид 415 с обмоткой 420 с узким сегментом, который содержит 125 витков провода, намотанного вокруг небольшого сегмента тороида 415. В типовых вариантах осуществления тороид 420 может выдавать приблизительно 200 мВ от пика к пику, когда магнит вращается внутри тороида 420. Частота выходного сигнала тороида 405 соответствует частоте вращения магнита. Типовой блок 113 управления работой забойного оборудования определяет число оборотов в минуту вала 335 гидравлического забойного двигателя на основании частоты измеренного сигнала и дополнительно в зависимости от конфигурации обмотки тороида. В этом случае блок 113 управления работой забойного оборудования распознает, что при каждом вращении вала 335 гидравлического забойного двигателя генерируется сигнал с той же частотой. Типовые варианты осуществления могут включать плотную намотку сегментов для повышения напряжения от пика к пику при каждом вращении вала 335 гидравлического забойного двигателя.
Другие типовые варианты осуществления включают переключатель с датчиком Холла, устанавливаемый на кольцо гидравлического забойного двигателя 111. Когда магнит 340 проходит над переключателем с датчиком Холла, вырабатываются импульсы, которые могут быть подсчитаны, при этом частота импульсов пропорциональна скорости вала 335 гидравлического забойного двигателя. Два или большее количество устройств с неравномерным разнесением, действующих на эффекте Холла, может применяться для определения как скорости вращения вала 335 гидравлического забойного двигателя, так и направления вращения вала 335 гидравлического забойного двигателя. В других типовых вариантах осуществления линейное устройство на эффекте Холла соединяется с устройством сравнения. В других типовых вариантах осуществления вместо переключателя с датчиком Холла применяется катушка с осью, расположенной радиально по отношению к валу 335 гидравлического забойного двигателя. Типовые варианты осуществления содержат схему усиления и схему сравнения, соединяемые с катушкой.
Другие типовые варианты реализации предполагают применение тороида 345 (верхней части 305) вокруг вращающегося элемента с одним или большим количеством магнитов, расположенных в тороиде 345 или вблизи него таким образом, что поле магнита соединяется с полем тороида 345. Такие варианты реализации могут содержать внутри тороида 345 три или большее количество магнитов, неравномерно распределенных таким образом, что можно как измерять скорость вращения, так и определять направление вращения вращающегося элемента, расположенного в тороиде 345. В некоторых вариантах осуществления верхний тороид 345, который содержит односегментную обмотку, например обмотки, показанные на фиг. 4А или 4В, способен определять как скорость вращения, так и направление вращения вала 335 гидравлического забойного двигателя.
На фиг. 5 представлена блок-схема типового способа анализа сигнала для применения с гидравлическим забойным двигателем 111 с окружающим блоком, который обсуждался выше. Блок 113 управления работой забойного оборудования принимает сигналы, индуцируемые в тороиде 345 от тороида 330 (блок 505). В некоторых типовых вариантах осуществления блок 113 управления работой забойного оборудования дополнительно программируется информацией, связанной с конфигурацией обмотки катушки тороида 345, например результирующей выходной частотой на тороиде 345 за каждое вращение вала 335 гидравлического забойного двигателя. Блок 113 управления работой забойного оборудования определяет скорость вращения вала 335 гидравлического забойного двигателя на основании сигналов, принимаемых от тороида 345 (блок 510). В некоторых вариантах осуществления блок 113 управления работой забойного оборудования определяет направление вращения вала 335 гидравлического забойного двигателя на основании сигналов, принимаемых от тороида 345 (блок 515). Как обсуждалось выше, неравномерно разнесенные сегменты обмотки применяются для создания сигналов, которые указывают как скорость, так и направление вращения. В других вариантах осуществления неравномерное распределение магнитов на валу 335 гидравлического забойного двигателя также может применяться для определения как скорости, так и направления вращения. В некоторых вариантах реализации блок 113 управления работой забойного оборудования анализирует выходной сигнал от одного или большего количества датчиков, которые выдаются на тороид 345. В некоторых типовых вариантах реализации блок 113 управления работой забойного оборудования анализирует выходной сигнал от одного или большего количества датчиков 320 гамма-излучения для определения, например, одного или большего количества свойств формации (блок 520). В других типовых вариантах реализации блок 113 управления работой забойного оборудования анализирует выходной сигнал от одного или большего количества датчиков 325 наддолотной инклинометрии (блок 525).
Таким образом, настоящее изобретение отлично подходит для достижения целей и получения преимуществ, указанных выше, а также присущих ему. Конкретные варианты осуществления, раскрытые выше, являются лишь иллюстрацией, поскольку настоящее раскрытие может быть модифицировано и осуществлено различными, но эквивалентными способами, очевидными для специалистов в данной области техники, у которых есть возможность ознакомиться с настоящим описанием. Кроме того, описанные в настоящем описании подробности конструкции не содержат ограничений за исключением описанных далее в формуле изобретения. Таким образом, очевидно, что конкретные иллюстративные варианты осуществления, раскрытые выше, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности настоящего изобретения. Кроме того, термины в формуле изобретения применяются в их простом, обычном значении, если только иное явно и однозначно не определено патентообладателем. Применяемая в формуле изобретения форма единственного числа предполагает наличие одного или большего количества рассматриваемых элементов.



Предложенная группа изобретений относится к средствам измерения параметров бурения и передачи измеренных данных в скважине в процессе бурения. В частности, предложена телеметрическая система определения параметров в процессе бурения, содержащая нижний тороид, содержащий обмотку нижнего тороида и дополнительно выполненный с возможностью принимать сигнал от одного или большего количества датчиков, верхний тороид, причем верхний тороид содержит обмотку верхнего тороида, и магнит, расположенный вдоль вращающегося элемента внутри одного из нижнего тороида или верхнего тороида. Причем один из нижнего тороида или верхнего тороида дополнительно выполнен с возможностью зацепления с вращающимся элементом. Нижний тороид и верхний тороид расположены таким образом, что сигнал с нижнего тороида индуцируется в верхнем тороиде. Обмотка нижнего тороида является неравномерной, такой что сигнал, индуцируемый в верхнем тороиде, указывает скорость вращения вала гидравлического забойного двигателя. 3 н. и 17 з.п. ф-лы, 8 ил.
1. Телеметрическая система определения параметров в процессе бурения, содержащая:
нижний тороид, содержащий обмотку нижнего тороида и дополнительно выполненный с возможностью принимать сигнал от одного или большего количества датчиков;
верхний тороид, причем верхний тороид содержит обмотку верхнего тороида; и
магнит, расположенный вдоль вращающегося элемента внутри одного из нижнего тороида или верхнего тороида;
причем:
один из нижнего тороида или верхнего тороида дополнительно выполнен с возможностью зацепления с вращающимся элементом;
нижний тороид и верхний тороид расположены таким образом, что сигнал с нижнего тороида индуцируется в верхнем тороиде; и
обмотка нижнего тороида является неравномерной, такой что сигнал, индуцируемый в верхнем тороиде, указывает скорость вращения вала гидравлического забойного двигателя.
2. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой
вращающийся элемент содержит вал гидравлического забойного двигателя;
нижний тороид выполнен с возможностью зацепления с валом гидравлического забойного двигателя; и
обмотка нижнего тороида представляет собой односегментную обмотку, занимающую не всю поверхность тороида.
3. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой
вращающийся элемент содержит вал гидравлического забойного двигателя;
нижний тороид выполнен с возможностью зацепления с валом гидравлического забойного двигателя; и
обмотка нижнего тороида расположена в двух или большем количестве сегментов.
4. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой
вращающийся элемент содержит вал гидравлического забойного двигателя;
нижний тороид выполнен с возможностью зацепления с валом гидравлического забойного двигателя; и
обмотка нижнего тороида расположена в трех или большем количестве сегментов, которые неравномерно разнесены вдоль тороида.
5. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой обмотка верхнего тороида является неравномерной обмоткой, в результате чего сигнал, индуцируемый в верхнем тороиде, дополнительно указывает скорость вращения и направление вращения вращающегося элемента.
6. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой один или большее количество датчиков содержат по меньшей мере один датчик гамма-излучения.
7. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой один или большее количество датчиков включают четыре датчика гамма-излучения.
8. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой один или большее количество датчиков включают датчик наддолотной инклинометрии.
9. Телеметрическая система определения параметров в процессе бурения по п. 1, в которой один или большее количество датчиков включают четыре датчика гамма-излучения и датчик наддолотной инклинометрии.
10. Энергонезависимый материальный носитель с сохраненной в нем программой для вычислительной машины, причем эта программа для вычислительной машины содержит исполнимые команды, которые обуславливают то, что по меньшей мере один процессор:
принимает сигнал, индуцируемый в верхнем тороиде от нижнего тороида; и
определяет скорость вращения вала гидравлического забойного двигателя на основании по меньшей мере частично сигнала, принимаемого от верхнего тороида;
причем:
нижний тороид и верхний тороид располагаются таким образом, что сигнал с нижнего тороида индуцируется на верхнем тороиде;
нижний тороид содержит неравномерную обмотку и выполнен с возможностью зацепления с валом гидравлического забойного двигателя и дополнительно выполнен с возможностью принимать сигнал от одного или большего количества датчиков; и
по меньшей мере один магнит расположен вдоль вала гидравлического забойного двигателя внутри нижнего тороида.
11. Материальный носитель по п. 10, в котором неравномерная обмотка нижнего тороида представляет собой односегментную обмотку, занимающую не всю поверхность тороида.
12. Материальный носитель по п. 10, в котором неравномерная обмотка нижнего тороида расположена в двух или большем количестве сегментов.
13. Материальный носитель по п. 10, в котором неравномерная обмотка нижнего тороида расположена в трех или большем количестве сегментов.
14. Материальный носитель по п. 10, в котором неравномерная обмотка нижнего тороида является неравномерной обмоткой и в которой исполняемые команды, которые обуславливают то, что по меньшей мере один процессор определяет скорость вращения вала гидравлического забойного двигателя на основании по меньшей мере частично сигнала, принимаемого от верхнего тороида, дополнительно обуславливают определение процессором направления вращения вала гидравлического забойного двигателя.
15. Материальный носитель по п. 10, в котором один или большее количество датчиков включают множество датчиков гамма-излучения и датчик наддолотной инклинометрии и в которой исполняемые команды дополнительно обуславливают получение и анализ по меньшей мере одним процессором выходных сигналов датчиков гамма-излучения и датчика наддолотной инклинометрии.
16. Система для проведения измерений во время бурения, содержащая:
бурильную колонну, содержащую узел гидравлического забойного двигателя, причем узел гидравлического забойного двигателя содержит:
силовую секцию для вращения вала гидравлического забойного двигателя, в которой вал гидравлического забойного двигателя проходит через нижний узел к буровому долоту;
нижний узел, содержащий нижний тороид, который содержит обмотку нижнего тороида и выполнен с возможностью зацепления с валом гидравлического забойного двигателя и дополнительно выполнен с возможностью приема сигнала от одного или большего количества датчиков;
верхний узел, содержащий верхний тороид, причем верхний тороид содержит обмотку верхнего тороида; и
по меньшей мере один магнит, расположенный вдоль вала гидравлического забойного двигателя внутри нижнего тороида;
причем:
нижний тороид и верхний тороид расположены таким образом, что сигнал с нижнего тороида индуцируется в верхнем тороиде; и
обмотка нижнего тороида является неравномерной обмоткой, такой что сигнал, индуцируемый в верхнем тороиде, указывает скорость вращения вала гидравлического забойного двигателя;
один или большее количество процессоров; и
по меньшей мере одно запоминающее устройство, содержащее программу для вычислительной машины, хранимую в энергонезависимом материальном носителе, причем эта программа для вычислительной машины содержит исполняемые команды, которые обуславливают то, что по меньшей мере один процессор:
принимает сигнал, индуцируемый в верхнем тороиде с помощью нижнего тороида; и
определяет скорость вращения вала гидравлического забойного двигателя на основании по меньшей мере частично сигнала, принимаемого от верхнего тороида.
17. Система по п. 16, в которой обмотка нижнего тороида расположена в двух или большем количестве сегментов.
18. Система по п. 16, в которой обмотка нижнего тороида расположена в трех или большем количестве сегментов.
19. Система по п. 16, в которой обмотка нижнего тороида является неравномерной обмоткой и в которой исполняемые команды, которые обуславливают то, что по меньшей мере один процессор определяет скорость вращения вала гидравлического забойного двигателя на основании по меньшей мере частично сигнала, принимаемого от верхнего тороида, дополнительно обуславливают определение процессором направления вращения вала гидравлического забойного двигателя.
20. Система по п. 16, в которой один или большее количество датчиков включают множество датчиков гамма-излучения и датчик наддолотной инклинометрии и в которой исполняемые команды дополнительно обуславливают получение и анализ по меньшей мере одним процессором выходных сигналов датчиков гамма-излучения и датчика наддолотной инклинометрии.
| US 20110278066 A1, 17.11.2011 | |||
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ИЗ СКВАЖИНЫ НА ПОВЕРХНОСТЬ | 2001 |
|
RU2272132C2 |
| US 5467832 A1, 21.11.1995 | |||
| US 20060086536 A1, 27.04.2006 | |||
| US 20050209782 A1, 22.09.2005 | |||
| US 20020196018 A1, 26.12.2002. | |||

