Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений и определения параметров орбиты космического аппарата (КА), и может быть использовано на наземных и бортовых комплексах управления для точного определения текущих параметров движения КА на геостационарной орбите искусственного спутника Земли.
Известен способ определения орбиты КА, заключающийся в выполнении траекторных измерений на нескольких витках полета КА с одного или нескольких наземных измерительных пунктов, передаче на ЭВМ комплекса управления измеренных значений траекторных параметров, накапливании их на магнитных запоминающих устройствах ЭВМ, совместной их статистической обработке (решения краевой задачи), в результате чего определяют параметры орбиты и среднее значение баллистического коэффициента КА, при этом для исключения аномальных измерений применяют "правило трех сигм", причем на каждом последующем приближении решения краевой задачи выполняют уточнение нижних пороговых границ аномальных измерений с учетом апостериорных данных обработки предшествующего приближения, полученные значения параметров орбиты и баллистического коэффициента применяют для прогнозирования значений параметров орбиты КА на задаваемый момент времени (Основы теории полета и элементы проектирования искусственных спутников земли/Под ред. М.К.Тихонравова. - М.: Машиностроение, 1974, с.212-243).
Недостатками этого способа являются большой объем вычислений на ЭВМ, необходимость выполнения нескольких сеансов связи с КА на суточном интервале полета для точного определения текущих параметров орбиты, возможность появления случаев, когда исключаются все или почти все измерения как аномальные из-за неправильных априорных данных исходной статистической гипотезы, некорректных данных начального приближения, больших систематических ошибок измерений.
Известны также другие способы определения параметров орбиты КА (например, JP 2001111469, G01S 3/42, 20.04.2001, CN 1224255, G01S 3/42, 28.07.1999, US 4771289, G01S 3/42, 13.09.1988), обладающие теми же недостатками.
Наиболее близким к предложенному является способ определения параметров орбиты КА на геостационарной орбите искусственного спутника Земли, заключающийся в выполнении измерений текущих навигационных параметров (ИТНП) в виде наклонных дальностей и снимаемых с датчиков поворота вала антенны углов линии визирования на КА от единственной радиотехнической станции в 5-10 минутных сеансах, следующих с интервалом в 2 часа на протяжении 2-х суток, передаче указанных ИТНП в центр управления, статистической обработки всей полученной совокупности ИТНП по методу наименьших квадратов при уточнении вектора кинематических параметров орбиты, коэффициента светового давления и постоянных составляющих систематических ошибок угловых измерений, обеспечивающей точность определения орбиты КА, необходимую для его удержания в области ±0,05° по долготе и широте относительно заданной точки стояния на геостационарной орбите искусственного спутника Земли (Soop M. Introduction to Geostationary Orbits. European Space Agency Journal, 1983, vol.6. - 137 p.).
Недостатками известного способа являются:
- антенна станции должна иметь достаточно сложные устройства для измерения и передачи данных об угловом положении линии визирования на спутник;
- размеры антенны должны позволять обеспечивать приемлемый уровень СКО случайных ошибок угловых измерений (диаметр - не менее 8-10 м в С-диапазоне, 4-6 м в Ku-диапазоне);
- для уменьшения межсеансового разброса систематических ошибок угловых измерений антенна станции, как правило, должна быть оснащена специальными устройствами антиобледенения, защиты от снега, дождя, порывистого ветра и пр.;
- необходимо выполнять начальную и периодическую юстировку угломерных каналов антенной системы;
- алгоритм статистической обработки должен позволять производить эффективную компенсацию влияния систематических ошибок угловых измерений на точность определения параметров орбиты КА, учитывать относительную значимость дальномерных и угловых измерений.
Технический результат изобретения заключается в обеспечении требуемой точности определения параметров орбиты КА для его удержания в области ±0,05° по долготе и широте относительно заданной точки стояния на геостационарной орбите искусственного спутника Земли с одновременным упрощением средств реализации способа.
Для достижения указанного технического результата предлагается способ определения параметров орбиты геостационарного спутника, заключающийся в том, что выполняют измерения наклонной дальности от наземной станции до геостационарного спутника в сеансах на протяжении нескольких суток, делят полученную совокупность измерений на две части - обучаемую и контрольную, делят определяемые параметры орбиты спутника на две группы - описывающие движение геостационарного спутника в плоскости орбиты (внутриплоскостные) и положение этой плоскости в инерциальном пространстве (внеплоскостные), производят серию оценок внутриплоскостных параметров орбиты статистической обработкой измерений из обучаемой совокупности при различных фиксированных значениях внеплоскостных параметров и рассчитывают соответствующие величины отклонений измерений из контрольной части, после чего осуществляют выбор оценок параметров орбиты геостационарного спутника, для которых сумма квадратов величин отклонений измерений из контрольной совокупности является минимальной.
Приведем более подробное описание способа.
Разработанный способ для обеспечения необходимой точности определения орбиты геостационарного спутника предполагает проведение и обработку только измерений дальности от единственной радиотехнической станции, полученных с определенной точностью в специально организованных циклах ИТНП. Основные положения, на которые опирается возможность применения такого подхода, состоят в следующем:
- корреляционные связи между параметрами орбиты геостационарного спутника, описывающими его движение в плоскости орбиты (внутриплоскостные элементы орбиты), и параметрами, описывающими положение этой плоскости (внеплоскостные элементы), при их определении по данным обработки ИТНП являются крайне слабыми, что позволяет производить независимое уточнение указанных элементов без существенных потерь в точности;
- внутриплоскостные элементы орбиты надежно и устойчиво определяются с необходимой точностью по дальномерным измерениям от одной станции (при некоторых фиксированных значениях внеплоскостных параметров);
- влияние на точность определения элементов орбиты ошибок модели движения и модели измерений может эффективно компенсироваться за счет уточнения по данным ИТНП наряду с элементами орбиты спутника коэффициента силы светового давления;
- внеплоскостные элементы орбиты КА могут быть получены на основе анализа методом кросс-проверки величин отклонений измерений дальности при выполнении определенных требований к точности и схеме проведения измерений.
В соответствии с изложенными положениями разработанный способ состоит в выполнении следующей последовательности этапов.
1. Радиотехническая станция производит измерения наклонных дальностей до геостационарного спутника с некоторой гарантированной точностью в сеансах определенной длительности. Полная продолжительность всего мерного интервала и временной шаг между последовательными сеансами назначаются специальным образом.
2. Выбираются начальные (априорные) значения параметров орбиты спутника (внутриплоскостные и внеплоскостные) для их уточнения при статистической обработке ИТНП. В случае отсутствия надежных априорных данных об орбите могут выбираться номинальные значения, соответствующие абсолютно стационарной в начальный момент орбите (с нулевыми значениями широты и компонент скорости в геодезической системе координат и с долготой, соответствующей середине номинального диапазона удержания).
3. Вся совокупность измерений дальностей, накопленных на мерном интервале, делится на две части - обучаемую и контрольную. Обучаемая совокупность в дальнейшем используется для решения задачи определения орбиты, контрольная - для расчета функционала, используемого при выборе наилучшей оценки внеплоскостных параметров методом кросс-проверки.
4. Выполняется серия последовательных решений задачи определения орбиты статистической обработкой по методу наименьших квадратов измерений дальностей из обучаемой совокупности с уточнением только внутриплоскостных элементов и коэффициента светового давления при различных фиксированных значениях внеплоскостных параметров.
5. При каждом таком уточнении рассчитываются значения функционала метода кросс-проверки по контрольной совокупности измерений дальностей
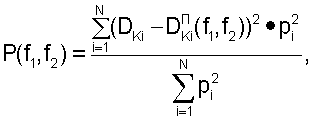
где
- pi i=1,2,... N - весовой коэффициент i-го измерения (для равноточных измерений все рi=1);
- {DKi}, i=1,2,... N - измерения дальностей из контрольной совокупности;
- {DП Ki (f1, f2)}, i=1,2,... N - предсказанные (расчетные) значения измерений дальности из контрольной совокупности, полученные при уточненных значениях внутриплоскостных параметров l1, l2, l3, l4, коэффициента светового давления К и выбранных значениях внеплоскостных параметров f1 и f2;
- N - общее число измерений в контрольной выборке.
6. Производится выбор в качестве оптимальных оценок элементов орбиты спутника (внутриплоскостных и внеплоскостных) таких значений, для которых достигается наименьшее значение указанного функционала метода кросс-проверки P(f1, f2)...
Конкретный вид уточняемых параметров орбиты спутника зависит от выбранной системы элементов орбиты для описания его движения. Например, для орбитальной системы к внутриплоскостным относятся проекции радиуса-вектора и вектора скорости на оси Х и Y (по радиусу и нормали в номинальной точке), а к внеплоскостным - на ось Z (по бинормали). Для системы оскулирующих элементов у геостационарных спутников к внутриплоскостным параметрам, как правило, относятся большая полуось орбиты, эксцентриситет, аргумент перигея и средняя аномалия, к внеплоскостным - наклонение орбиты и долгота восходящего узла.
Для надежной работы разработанного способа необходимо выполнение следующих условий и ограничений:
- продолжительность мерного интервала проведения измерений дальностей должна составлять не менее 2-х последовательных суток;
- интервалы между последовательно проводимыми сеансами измерений не должны превышать 2-3-х часов;
- длительность одного сеанса проведения измерений дальности должна составлять не менее 5 минут;
- ошибки измерений дальности не должны превышать 1 метра по уровню СКО случайной ошибки и 1 метров по уровню СКО систематической ошибки;
- при наличии на мерном интервале маневров коррекции орбиты соответствующие компоненты вектора силы тяги должны учитываться в модели движения спутника, причем их погрешности не должны превышать 10% от номинальной величины.
Основные преимущества разработанного способа определения параметров орбиты геостационарного спутника состоят в следующем:
- значительно уменьшается уровень требований к антенной системе измерительной станции за счет отказа от необходимости обеспечения измерения углов линии визирования на обслуживаемый геостационарный спутник с достаточно высокой точностью в любых возможных климатических и погодных условиях;
- отпадает необходимость в проведении регулярной юстировки угломерных каналов используемой антенной системы;
- разрешается ряд алгоритмических проблем, связанных с совместной обработкой дальномерных и угловых измерений, с необходимостью компенсации влияния систематических погрешностей угловых измерений;
- разработанный способ органически сочетается с существующими тенденциями в управлении полетом геостационарных спутников, предполагающими все более интенсивное использование возможностей связного канала для передачи и приема различной технической информации, включая и данные ИТНП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТОБРАЖЕНИЯ БАЛЛИСТИЧЕСКОГО СОСТОЯНИЯ ОРБИТАЛЬНОЙ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2461016C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМО-ПЕРЕДАЮЩИХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2708883C1 |
| СПОСОБ ТРАЕКТОРНОГО КОНТРОЛЯ МНОГОПУНКТНЫМ ИЗМЕРИТЕЛЬНЫМ КОМПЛЕКСОМ МНОГОИМПУЛЬСНЫХ ОРБИТ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ВЫСОКОЭЛЛИПТИЧЕСКИЕ, ГЕОПЕРЕХОДНЫЕ И ГЕОСТАЦИОНАРНЫЕ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ РАЗГОННЫХ БЛОКОВ | 2024 |
|
RU2834499C1 |
| СПОСОБ ТЕСТИРОВАНИЯ ДВИГАТЕЛЕЙ КОРРЕКЦИИ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2535352C2 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2487823C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ (ИСЗ) | 2009 |
|
RU2397927C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМНЫХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2702098C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2017 |
|
RU2652603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2150414C1 |
Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений и определений параметров орбиты космического аппарата (КА), и может быть использовано на наземных и бортовых комплексах управления для точного определения текущих параметров движения КА на геостационарной орбите искусственного спутника Земли. Технический результат заключается в обеспечении требуемой точности определения параметров орбиты КА с одновременным упрощением средств реализации способа. Способ заключается в том, что выполняют измерения наклонной дальности от наземной станции до геостационарного спутника в сеансах на протяжении нескольких суток, делят полученную совокупность измерений на две части - обучаемую и контрольную совокупности, делят определяемые параметры орбиты спутника на две группы - описывающие движение геостационарного спутника в плоскости орбиты - внутриплоскостные и положение этой плоскости в инерциальном пространстве - внеплоскостные, производят серию оценок внутриплоскостных параметров орбиты статистической обработкой измерений из обучаемой совокупности при различных фиксированных значениях внеплоскостных параметров и рассчитывают соответствующие величины отклонений значений измерений из контрольной части от расчетных значений измерений из контрольной совокупности, после чего осуществляют выбор оценок параметров орбиты геостационарного спутника, для которых сумма квадратов величин отклонений значений измерений из контрольной совокупности является минимальной.
Способ определения параметров орбиты геостационарного спутника, заключающийся в том, что выполняют измерения наклонной дальности от наземной станции до геостационарного спутника в сеансах на протяжении нескольких суток, делят полученную совокупность измерений на две части - обучаемую и контрольную совокупности, делят определяемые параметры орбиты спутника на две группы - описывающие движение геостационарного спутника в плоскости орбиты - внутриплоскостные и положение этой плоскости в инерциальном пространстве - внеплоскостные, производят серию оценок внутриплоскостных параметров орбиты статистической обработкой измерений из обучаемой совокупности при различных фиксированных значениях внеплоскостных параметров и рассчитывают соответствующие величины отклонений значений измерений из контрольной части от расчетных значений измерений из контрольной совокупности, после чего осуществляют выбор оценок параметров орбиты геостационарного спутника, для которых сумма квадратов величин отклонений значений измерений из контрольной совокупности является минимальной.
| Soop M., Introduction to Geostationary Orbits | |||
| В: European Agency Jour-nak, Paris, 1983, vol.6 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2150414C1 |
| WO 9940692 A1, 12.08.1999 | |||
| US 6352222 B1, 05.03.2002 | |||
| JP 2001111469, 20.04.2001. | |||

