Изобретение относится к способам навигации летательных аппаратов. Его использование позволяет повысить объемы получаемых измерений, благодаря чему обеспечивают возможность повышения точности и достоверности навигационных определений.
Известны способы траекторного контроля летательных аппаратов, включая и космические объекты - ракеты-носители, разгонные блоки и космические аппараты, основанные на использовании навигационного поля, создаваемого в околоземном пространстве средневысотными космическими навигационными системами (КНС) типа ГЛОНАСС (Россия), GPS (США), Галилео (Европа) (см. ГЛОНАСС. Принципы построения и функционирования / Под ред. Перова А.И. Харисова В.Н., издание четвертое перераб. и доп. - М.: Радиотехника, 2010 - 797 с. С. 371-373 «Технология определения траектории движения спутника»[1]). В этих системах до высот 2-4 тыс. км создают сплошное навигационное поле, в любой точке которого одновременно наблюдают не менее четырех навигационных космических аппаратов системы, излучающих навигационные сигналы. Принимая на борту космического объекта эти сигналы, содержащие сведения о текущих эфемеридах навигационных космических аппаратов, и проводя измерения псевдодальности и радиальной псевдоскорости, определяют текущие навигационные вектора (компоненты положения и составляющие скорости) космического объекта. На основе накопления на некотором мерном интервале выборок текущих навигационных векторов определяют статистические оценки параметров орбиты космического объекта.
Недостаток способа, описанного в [1], заключается в необходимости накопления данных навигационных определений не менее, чем по 14 виткам, а также использования математических методов приведения и постановки спутника в системную точку. Также требуется разработка высокоточных математических моделей движения и измерений, на точность которых влияют следующие геофакторы: геодезические, определяемые погрешностью задания системы координат и гравитационного поля Земли, геодезические, связанные с нахождением координат полюса и неравномерности вращения Земли, а также факторы, обусловленные учетом негравитационных возмущений в модели движения. По этой части мы всегда отставали от США. Поэтому нужны были нетрадиционные решения. В 70-х годах - это был выбор слабо резонансных орбит, применение согласующих моделей движения КА и разработанная технология уточнения параметров орбиты при недостаточно известных геофакторах. Для этого были использованы системы лазерной дальнометрии (СЛД) и усовершенствованный наземный многопунктный измерительный комплекс.
Известен также способ траекторного контроля, при котором на некотором мерном интервале проводят измерения текущих навигационных параметров, в частности, дальности и радиальной скорости космического объекта с наземных пунктов многопунктного измерительного комплекса (МИК), и определяют по полученным измерениям статистические оценки параметров орбиты космического объекта (см. Космические траекторные измерения / Под ред. Агаджанова П.А., Дулевича В.Е., Коростелева А.А. - М.: Сов. радио, 1969, 504 с., п. 12.1, С. 463-469 [2], Радиосистемы управления / Под ред. Вейцеля В.А. - М.: Дрофа,2005, 416 с. п.2.3.2, С.88-94 [3], Основы радионавигационных измерений. Под ред. Н.Ф. Клюева, Минобороны СССР, 1987, 429 с. п. 8. С. 354-396 [4]).
Известно, что нет универсальных способов, поскольку у каждого из них есть как преимущества, так и недостатки. Поэтому перспектива развития систем измерений и навигационных определений заключается в комплексировании различных способов и таком, что недостатки одного из них компенсируют преимуществами другого. Недостатки способов траекторного контроля на основе МИК заключаются в том, что результаты траекторных измерений получают на Земле и они являются только одной из составляющих контроля орбит выведения космических аппаратов. При этом вторая навигационная составляющая, основу которой составляет КНС ГЛОНАСС, используется также недостаточно эффективно, поскольку не учитывает результаты, полученные при использовании МИК.
Наиболее близким аналогом является «Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации», патент РФ №2759173, СПК B64G 1/002 и G08C 19/28, авторы Чаплинский B.C., Кукушкин С.С., Коновалов В.П., Прут В.И., заявка №2021108447 от 30.03.2021, опубл. 09.11.2021, бюл. №31 [5] со следующей формулой изобретения.
1. Способ навигационного контроля орбит выведения космических аппаратов, включающий определение навигационных векторов разгонного блока по навигационным сигналам, принимаемым с навигационных космических аппаратов орбитальной группировки космической навигационной системы (КНС) ГЛОНАСС, формируемым при взаимодействии по радиоканалам с наземным комплексом управления навигационными космическими аппаратами, который связан по системе связи и передачи данных с центром управления КНС ГЛОНАСС, отличающийся тем, что для определения параметров орбит разгонных блоков вне сплошного навигационного поля системы ГЛОНАСС создают на орбитах выведения космических аппаратов в соответствии с планом работы центра управления разгонными блоками локальное управляемое навигационное поле требуемой структуры, сопровождающее разгонные блоки при их движении по орбите и формируемое наземным управляемым локальным дополнением к системе ГЛОНАСС, состоящим из группировки наземных управляемых навигационных станций, размещенных на наземных пунктах с известными координатами, с аппаратурой формирования навигационного сигнала системы ГЛОНАСС, передают по радиоканалу на наземные приемно-регистрирующие станции значения текущих навигационных векторов, определенные на мерных участках полета навигационной аппаратурой потребителя на разгонных блоках, обрабатывают в центре управления разгонными блоками полученные значения текущих навигационных векторов и определяют параметры орбиты выведения космического аппарата.
2. Система, реализующая способ навигационного контроля орбит выведения космических аппаратов по п. 1, состоящая из разгонного блока с бортовой навигационной аппаратурой потребителя навигационных сигналов ГЛОНАСС, связанной радиоканалами с орбитальной группировкой навигационных космических аппаратов, передающая результаты определения навигационных векторов по радиоканалу на наземные приемно-регистрирующие станции, с которых полученные навигационные вектора передают по системе связи и передачи данных (ССПД) в единый центр управления полетами разгонных блоков, кроме того по системе связи и передачи данных организуют двусторонний обмен информацией между центром управления полетами разгонных блоков и центром управления КНС ГЛОНАСС, отличающаяся тем, что в нее для создания локального навигационного поля требуемой структуры, сопровождающего РБ при их движении по орбите выведения космических аппаратов в соответствии с планом работы центра управления полетами разгонных блоков, введены наземные управляемые навигационные станции (НУНС), размещенные на четырех и более наземных пунктах с известными координатами, представляющие собой наземное управляемое дополнение к системе ГЛОНАСС, включающее аппаратуру формирования навигационного сигнала системы ГЛОНАСС, соединенную с хранителем частоты и времени, передающее устройство, которое соединено с полноповоротной антенной, наземную навигационную аппаратуру потребителя системы ГЛОНАСС, соединенную радиоканалами с навигационными космическими аппаратами КНС ГЛОНАСС, вычислительный комплекс, соединенный системой связи и передачи данных с центром управления КНС ГЛОНАСС, соединенный также с передающим устройством и с наземной управляемой антенной, обеспечивающей согласно плану работы передачу сигналов на разгонные блоки, орбиты которых контролируют.
3. Система по п. 2, отличающаяся также тем, что наземная управляемая навигационная станция (НУНС), формирующая навигационный сигнал и наземная навигационная аппаратура потребителя (НАП) соединены с общим хранителем частоты и времени с относительной нестабильностью не хуже единицы на десять в минус тринадцатой степени, передающее устройство соединено с полноповоротной антенной, имеющей коэффициент усиления, обеспечивающий плотность потока мощности навигационного сигнала на орбитах выведения КА соответствующую формируемой навигационными космическими аппаратами системы ГЛОНАСС.
4. Система по п. 2, отличающаяся тем, что полноповоротная антенна соединена с вычислительным комплексом для наведения на разгонные блоки по целеуказаниям, рассчитанным в вычислительном комплексе по номинальным параметрам орбиты выведения космического аппарата, которые получены в центре управления системы ГЛОНАСС из центра управления полетами разгонными блоками в соответствии с планом работы наземной управляемой навигационной станции на излучение навигационного сигнала.
5. Система по п. 2, отличающаяся тем, что наземная управляемая навигационная станция в качестве эфемерид имеет гринвичские координаты наземного пункта, наземная управляемая навигационная станция подключена к узлу связи и осуществляет информационный обмен с единым центром управления системы ГЛОНАСС для передачи измерений псевдодальности и радиальной псевдоскорости разгонных блоков, проводимых наземной навигационной аппаратурой потребителя, и приема от него частотно-временных поправок для навигационного сигнала, передаваемого на разгонные блоки.
Недостаток изобретения [5] заключается в том, что оно направлено на совершенствование КНС ГЛОНАСС за счет включаемого в его состав дополнения в виде наземных управляемых навигационных станций (НУНС) и не содержит предложений по комплексированию со средствами многопунктного измерительного комплекса (МИК).
Необходимость комплексирования заключается в следующем.
При выведении космических аппаратов (КА) на высокоэллиптические, геопереходные и геостационарные орбиты с использованием многоимпульсных схем в общем случае последовательно формируются опорная, промежуточная, переходная и целевая орбиты. Для таких схем выведения использование известных способов траекторного контроля имеет ряд ограничений, снижающих эффективность контроля. В зоне сплошного навигационного поля средневысотных космических навигационных систем находятся лишь опорная и промежуточная орбиты, и только параметры этих орбит можно определить по сигналам КНС.
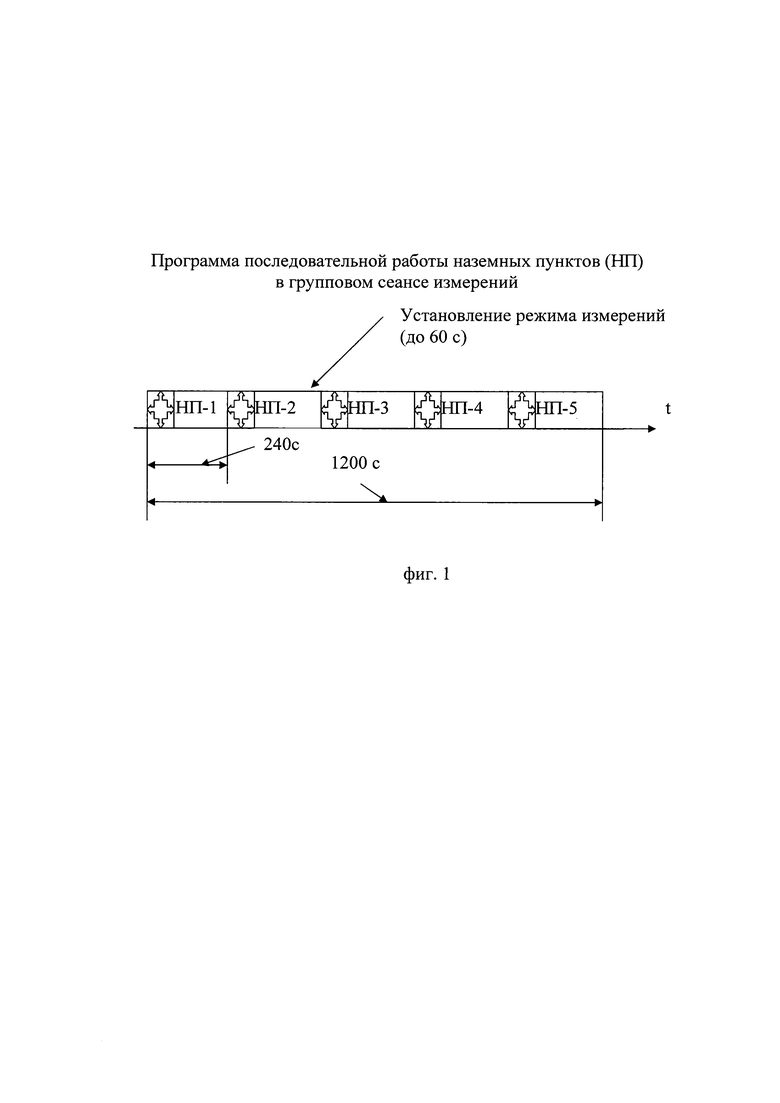
Для траекторного контроля параметров переходной и целевой орбиты проводятся сеансы измерений дальности и радиальной скорости многопунктным наземным измерительным комплексом, однако из-за ограничений по бортовому электропотреблению и обеспечению тепловых режимов число сеансов измерений ограничивается одним-двумя при их продолжительности ~ 20 минут. В групповом сеансе измерительные средства наземных пунктов работают в запросном режиме последовательно. Вследствие переходных процессов и повторного формирования когерентной несущей частоты бортового сигнала при смене наземного пункта, излучающего измерительный сигнал, возможны потери рабочего времени до 25% (фиг. 1). Эти потери могут возрасти до 50-70% при вращении разгонного блока вокруг своей продольной оси, которое осуществляют для обеспечения теплового режима.
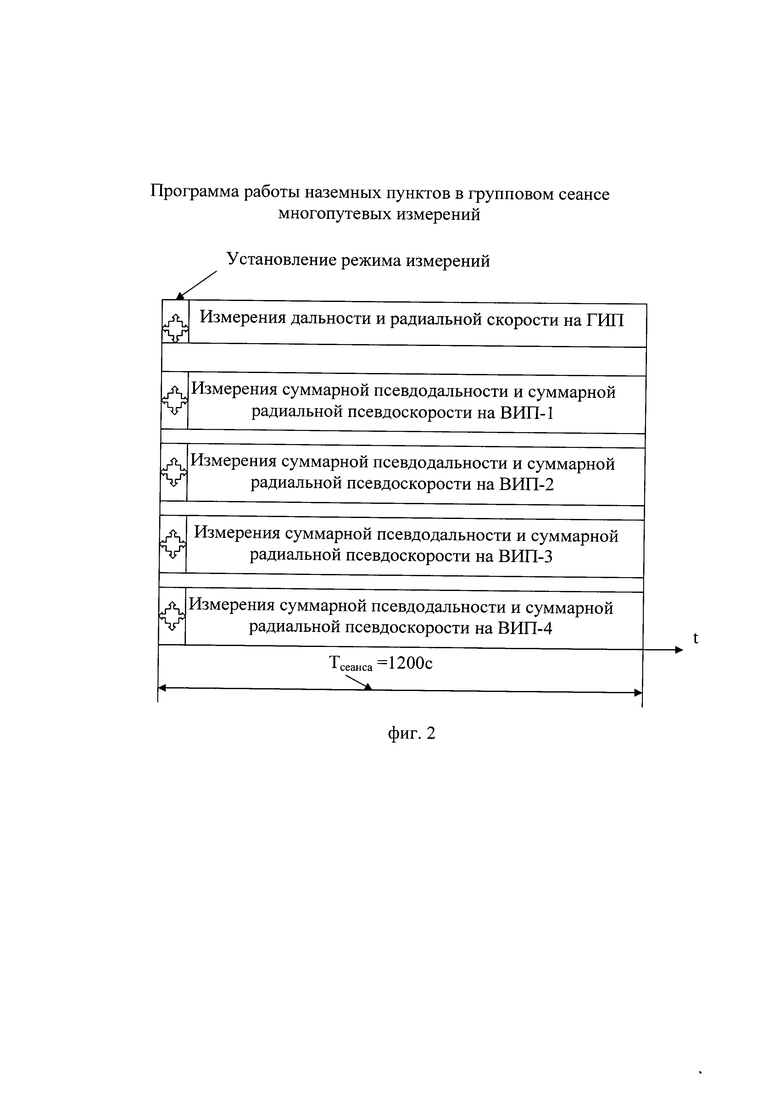
Точность определения параметров контролируемых орбит существенно зависит от геометрии измерительной схемы, объема и точности измерений текущих навигационных параметров. Формирование геометрической схемы обеспечивается топологией многопунктного измерительного комплекса. Объем получаемой в групповом сеансе измерительной информации может быть значительно увеличен при применении технологии многопутевых измерений, объединяющей режимы запросных и беззапросных измерений (фиг. 2). При этом на одном из наземных измерительных пунктов (ИП), который выбран главным (ГИП), излучают сигнал запроса, принимают сигнал ответа с разгонного блока (РБ) и проводят измерение дальности и радиальной скорости. Такой режим измерений называют запросным. Другие пункты наземного комплекса, названные вспомогательными (ВИЛ), в зоне видимости которых находится разгонный блок, принимают сигнал ответа с РБ на запрос ГИП и проводят с использованием своего опорного сигнала измерение суммарной псевдодальности ГИП-РБ-ВИП и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП.
Если принять, как и при последовательной работе наземных измерительных пунктов, время на установление режима измерений, равное 60 секундам, то ГИП будет проводить измерения дальности (L) и радиальной скорости  РБ не 180 секунд (как в случае программы, приведенной на фиг. 1), а 1140 секунд. Все ВИПы будут (после установления режима измерений в течение 60 секунд) проводить измерения суммарной псевдодальности (SГВ) и суммарной псевдоскорости
РБ не 180 секунд (как в случае программы, приведенной на фиг. 1), а 1140 секунд. Все ВИПы будут (после установления режима измерений в течение 60 секунд) проводить измерения суммарной псевдодальности (SГВ) и суммарной псевдоскорости  в течение 1140 секунд. В целом в сеансе измерения суммарной псевдодальности и суммарной псевдоскорости на четырех ВИП будут продолжаться 4560 секунд. Общее полезное время многопутевых измерений составит 5700 секунд, по сравнению с суммарным интервалом последовательных измерений дальности и радиальной скорости пятью пунктами (фиг.1), равным 900 секундам.
в течение 1140 секунд. В целом в сеансе измерения суммарной псевдодальности и суммарной псевдоскорости на четырех ВИП будут продолжаться 4560 секунд. Общее полезное время многопутевых измерений составит 5700 секунд, по сравнению с суммарным интервалом последовательных измерений дальности и радиальной скорости пятью пунктами (фиг.1), равным 900 секундам.
Измеренные значения суммарной псевдодальности и суммарной псевдоскорости отличаются от соответствующих значений суммарной дальности и суммарной радиальной скорости вследствие того, что излучаемые сигналы формируют на ГИП, а опорные сигналы - на ВИП, в результате чего действительные значения частот и начальных фаз колебаний независимых генераторов не совпадают.Поэтому непосредственное использование измерений суммарной псевдодальности и суммарной радиальной псевдоскорости при определении параметров контролируемых орбит практически невозможно, так как дополнительное включение в состав уточняемых величин разности частот и начальных фаз ГИП и ВИП нарушает условия наблюдаемости параметров высокоэллиптических, геопереходных и геостационарных орбит.
Для пересчета псевдодальности и радиальной псевдоскорости в дальность и радиальную скорость производят синхронизацию и фазирование частотозадающих генераторов разнесенных измерительных пунктов. Эту операцию осуществляют на промежуточной орбите, параметры которой определяют с использованием сигналов космических навигационных систем ГЛОНАСС/GPS, либо, в частном случае, когда промежуточную орбиту по принятой схеме выведения КА не формируют, на начальном участке переходной орбиты, находящемся в сплошном навигационном поле космических навигационных систем. Указанные операции выполняются для т.н. калибровки (синхронизации и фазирования) генераторов на наземных ИП. Эти поправки могут быть объективно справедливы при локализации РБ на начальных участках промежуточной и переходной орбит, т.е. в поле устойчивого навигационного поля (до 2000-4000 км). По мере ухода РБ на целевую орбиту и движения по ней из-за смены геометрии наземных ИП относительно РБ меняются условия прохождения (длины путей) радиоволн через тропосферу, стратосферу и ионосферу. Это может потребовать проведения дополнительных калибровок. В противном случае поправки по фазировке бортового и наземных генераторов могут выйти за пределы допустимых погрешностей. Это и объясняет необходимость проведения последовательных сеансов измерений для наземных пунктов.
При отсутствует потребности проведения дополнительных калибровок, для пересчета псевдодальности и радиальной псевдоскорости в дальность и радиальную скорость производят синхронизацию и фазирование частотозадающих генераторов разнесенных измерительных пунктов. С этой целью на промежуточной орбите (а если ее не формируют, то на начальном участке переходной орбиты) проводят многопутевые измерения, и определяют средние сеансные отклонения  измерений суммарной псевдодальности
измерений суммарной псевдодальности  и суммарной радиальной псевдоскорости
и суммарной радиальной псевдоскорости  на i -тых ВИПах от соответствующих им значений суммарной дальности
на i -тых ВИПах от соответствующих им значений суммарной дальности  и суммарной радиальной скорости
и суммарной радиальной скорости  вычисленных по орбите, полученной с использованием космических навигационных систем и принятых за эталонные. Используя средние сеансные отклонения измерений суммарной псевдодальности
вычисленных по орбите, полученной с использованием космических навигационных систем и принятых за эталонные. Используя средние сеансные отклонения измерений суммарной псевдодальности  и суммарной радиальной псевдоскорости
и суммарной радиальной псевдоскорости  определяют разности начальных дальностей, соответствующих начальной разности фаз дальномерных сигналов, и разности радиальных скоростей, соответствующих разности несущих частот ГИП и всех ВИП, по следующим формулам:
определяют разности начальных дальностей, соответствующих начальной разности фаз дальномерных сигналов, и разности радиальных скоростей, соответствующих разности несущих частот ГИП и всех ВИП, по следующим формулам:

и

где с - скорость света, Ωг - частота дальномерного сигнала; ωг и  - номинальные значения несущей частоты сигнала ГИП и i-того ВИП; ϕг и
- номинальные значения несущей частоты сигнала ГИП и i-того ВИП; ϕг и  - начальные фазы опорных дальномерных сигналов ГИП и i-тых ВИП.
- начальные фазы опорных дальномерных сигналов ГИП и i-тых ВИП.
Эти значения разности начальных дальностей и разности радиальных скоростей ГИП и всех ВИП принимают за поправки, обеспечивающие на участках полета вне сплошного навигационного поля определение суммарной дальности ГИП-РБ-ВИП  и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП
и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП  по измеренным значениям суммарной псевдодальности ГИП-РБ-ВИП
по измеренным значениям суммарной псевдодальности ГИП-РБ-ВИП  и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП
и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП  по следующим формулам:
по следующим формулам:
и
За погрешности определения разности начальных дальностей и разности радиальных скоростей ГИП и ВИП, используемых в качестве поправок к измерениям псевдодальности и радиальной псевдоскорости, принимают погрешность определения расчетных аналогов  по «эталонной» орбите, полученной с использованием КНС. В существующей практике применения КНС ГЛОНАСС/GPS погрешность определения дальности и радиальной скорости по орбите, полученной по КНС, составляет 10-15 м и 1-2 см/с, что находится на уровне допустимых погрешностей траекторных измерений. При этом погрешности определения параметров орбит КА по КНС имеют устойчивую тенденцию к снижению. В то же время современные средства траекторных измерений наземных пунктов оснащаются частотозадающими генераторами с относительной нестабильностью порядка 10-12, что обеспечивает возможность использования полученных поправок на всем интервале времени выведения КА.
по «эталонной» орбите, полученной с использованием КНС. В существующей практике применения КНС ГЛОНАСС/GPS погрешность определения дальности и радиальной скорости по орбите, полученной по КНС, составляет 10-15 м и 1-2 см/с, что находится на уровне допустимых погрешностей траекторных измерений. При этом погрешности определения параметров орбит КА по КНС имеют устойчивую тенденцию к снижению. В то же время современные средства траекторных измерений наземных пунктов оснащаются частотозадающими генераторами с относительной нестабильностью порядка 10-12, что обеспечивает возможность использования полученных поправок на всем интервале времени выведения КА.
Выполненное описание позволяет сформулировать следующую формулу изобретения.
1. Способ траекторного контроля многопунктным измерительным комплексом многоимпульсных орбит выведения космических аппаратов на высокоэллиптические, геопереходные и геостационарные орбиты с использованием разгонных блоков, включающий прием на разгонном блоке сигналов средневысотных космических навигационных систем типа ГЛОНАСС/GPS на мерных участках полета в сплошном навигационном поле, характеризующимся тем, что в нем одновременно в зоне радиовидимости находятся не менее четырех космических аппаратов, излучающих навигационные сигналы, на основе которых осуществляют измерение навигационных параметров, выполняя следующую последовательность операций: определения текущих навигационных векторов разгонного блока, передачи накопленных на мерном интервале в сплошном навигационном поле текущих навигационных векторов разгонного блока по радиоканалам в наземный измерительный комплекс и определение в центре управления по текущим навигационным векторам статистических оценок параметров орбиты разгонного блока на мерном временном интервале, при этом производят излучение запросного траекторного сигнала и измерение на его основе дальности и радиальной скорости разгонного блока с одного из наземных пунктов, который определен в соответствии с планом измерений, как главный в существующем многопунктном измерительном комплексе, а иные, как ведомые, осуществляют комбинированное измерение с использованием космических навигационных систем (КНС) ГЛОНАСС/GPS на мерных участках полета разгонного блока, как в сплошном навигационном поле КНС ГЛОНАСС/GPS, так и вне его, отличающийся тем, что реализуют следующие операции получения уточненных комплексированных оценок навигационных определений с использованием КНС ГЛОНАСС/GPS и измерений, получаемых многопунктным измерительным комплексом (МИК): принимают на наземных пунктах измерительного комплекса, называемых ведомыми, сигнал ответа бортового приемоответчика на запросный траекторный сигнал главного наземного пункта на мерных участках полета разгонного блока в сплошном навигационного поле космических навигационных систем, измеряют суммарную псевдодальность на основе МИК по пути главный наземный пункт-разгонный блок-ведомый наземный пункт  и суммарную радиальную псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов
и суммарную радиальную псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов  и определяют поправки к измеренным на ведомых наземных пунктах многопунктного измерительного комплекса (МИК) значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем вычисления статистических оценок разности значений суммарной псевдодальности и суммарной радиальной псевдоскорости, измеренных на участке полета разгонного блока в сплошном навигационном поле, и их расчетных аналогов
и определяют поправки к измеренным на ведомых наземных пунктах многопунктного измерительного комплекса (МИК) значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем вычисления статистических оценок разности значений суммарной псевдодальности и суммарной радиальной псевдоскорости, измеренных на участке полета разгонного блока в сплошном навигационном поле, и их расчетных аналогов  по статистическим параметрам орбиты, полученной в сплошном навигационном поле по навигационным векторам и принятой за эталонную, реализуя определение поправок по следующим формулам:
по статистическим параметрам орбиты, полученной в сплошном навигационном поле по навигационным векторам и принятой за эталонную, реализуя определение поправок по следующим формулам:
и
а, кроме того, принимают на ведомых наземных пунктах измерительного комплекса сигнал ответа бортового приемоответчика на запросный траекторный сигнал главного наземного пункта на мерных участках полета разгонного блока на орбитах выведения космических аппаратов вне сплошного навигационного поле космических навигационных систем, измеряют суммарную псевдодальность по пути: главный наземный пункт - разгонный блок - ведомый наземный пункт  и суммарную радиальной псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов
и суммарную радиальной псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов  определяют значения суммарной дальности
определяют значения суммарной дальности  и суммарной радиальной скорости
и суммарной радиальной скорости  по измеренным значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем ввода в них полученных поправок по следующим формулам:
по измеренным значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем ввода в них полученных поправок по следующим формулам:
и
после чего определяют параметры орбит выведения космических аппаратов с использованием измеренных на главном наземном пункте значений дальности и радиальной скорости разгонного блока и полученных значений суммарной дальности главный наземный пункт-разгонный блок-ведомый наземный пункт и суммарной радиальной псевдоскорости разгонного блока относительно главного и ведомого наземных пунктов.
2. Способ по п. 1, отличающийся тем, что вводят локальное дополнение к КНС ГЛОНАСС, которое состоит из группировки наземных управляемых навигационных станций (НУНС), размещенных на наземных пунктах с известными координатами с аппаратурой формирования навигационного сигнала КНС ГЛОНАСС последнего поколения, подобной той, что размещена на навигационных космических аппаратах (НКА), передают по каналу связи на наземные приемно-регистрирующие станции значения текущих навигационных векторов, которые определяют на мерных участках полета навигационной аппаратуры потребителя, установленной на разгонных блоках (РБ), обрабатывают в едином центре управления разгонными блоками полученные значения текущих навигационных векторов и определяют на их основе параметры орбиты выведения космического аппарата.
Сущностные характеристики предлагаемого способа заключаются, таким образом, в следующем. При его использовании обеспечивают комплексирование результатов, полученных средствами наземного МИК и усовершенствованной за счет введения НУНС в КНС ГЛОНАСС. В результате этого недостатки одной системы - усовершенствованной КНС ГЛОНАСС - компенсируют за счет преимуществ МИК и, наоборот.
Технический результат изобретения заключается в том, что технология траекторного контроля орбит выведения КА с проведением многопутевых измерений и применением космических навигационных систем для определения поправок в многопутевые измерения на участках полета в сплошном навигационном поле позволяет получить по сравнению с технологией последовательного проведения запросных измерений существенно больший (в 5 и более раз) объем измерений текущих навигационных параметров с точностью, сопоставимой с точностью запросных измерений дальности и радиальной скорости.
Основные операции, составляющие основу изобретения, рассмотрим на примере траекторного контроля орбит выведения спутника связи на геопереходную орбиту с параметрами: высота в апогее 35786 км, высота в перигее 8890 км, наклонение плоскости 13,8 град. С использованием ракеты-носителя выводят орбитальный блок в составе разгонного блока и космического аппарата на начальную траекторию. Затем первым включением маршевого двигателя разгонного блока формируют опорную околоземную орбиту, полет по которой проходит, в основном, вне видимости с наземных пунктов измерительного комплекса.
Вторым включением маршевого двигателя орбитальный блок переводят на промежуточную орбиту с параметрами: высота в апогее 5000 км, высота в перигее 270 км, наклонение плоскости 50,3 град. Полет по данной орбите проходит в большей части в сплошном навигационном поле космических навигационных систем ГЛОНАСС/GPS и в зоне совместной радиовидимости орбитального блока с наземных пунктов измерительного комплекса. В результате этого обеспечивают условия получения на борту разгонного блока текущих навигационных векторов РБ и производят их передачу по каналам телеконтроля на наземные измерительные пункты (ИП). После чего осуществляют сбор принятой информации в Центре управления, где по навигационным векторам проводят определение фактических параметров промежуточной орбиты. При проведении наземными пунктами измерений на этой же орбите из их состава с учетом зон совместной видимости назначают один либо два (западный и восточный) главный пункт (ГИП), с которого в течение сеанса связи с бортовым приемоответчиком разгонного блока (или части сеанса при условии, что ГИПов два) излучают запросный измерительный сигнал, принимают на нем ответный сигнал с борта РБ и проводят измерение дальности и радиальной скорости РБ. Ответный сигнал бортового приемопередатчика на запрос с главного пункта принимают на остальных пунктах измерительного комплекса (ВИПах) и проводят на них измерение суммарной псевдодальности ГИП-РБ-ВИП и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП. (Если не обеспечивается единая для всех пунктов измерительного комплекса радиовидимость РБ, то наземные пункты разделяют на две группы - западную и восточную, для которых назначают свои ГИПы, в результате чего создают условия, при которых каждый из пунктов имеет возможность принимать сигнал во время работы одного из ГИПов.)
Полученные на ВИПах измерения суммарной псевдодальности и суммарной радиальной псевдоскорости передают в Центр управления. В Центре управления определяют оценки средних отклонений суммарной псевдодальности ГИП-РБ-ВИП и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП от соответствующих им значений суммарной дальности и суммарной радиальной скорости, вычисленных по орбите, полученной по навигационным векторам. Эти оценки принимают за поправки, которые обеспечивают определение суммарной дальности ГИП-РБ-ВИП и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП по измеренным значениям суммарной псевдодальности ГИП-РБ-ВИП и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП.
Очередными включениями маршевого двигателя орбитальный блок переводят на переходную орбиту с параметрами: высота в апогее 35800 км, высота в перигее 425 км, наклонение плоскости 49,1 град. На этой орбите условия для получения на борту текущих навигационных векторов по сигналам космических навигационных систем не могут быть реализованы. Для контроля параметров орбиты в плановых сеансах измерений (как правило - двух, разнесенных по орбите) в зоне совместной радиовидимости орбитального блока со всех наземных пунктов измерительного комплекса, с главного наземного пункта излучают запросный траекторный сигнал. Сигнал ответа бортового приема-передатчика на запросный сигнал ГИП принимают на всех наземных пунктах измерительного комплекса, причем на ГИП измеряют дальность ГИП-РБ-ГИП и радиальную скорость РБ относительно ГИП, а на ведомых наземных пунктах измеряют суммарную псевдодальность ГИП-РБ-ВИП и суммарную радиальную псевдоскорость РБ относительно ГИП и ВИП. Программа сеанса измерений соответствует схеме, приведенной на фиг. 2.
Полученные измерения передают в Центр управления, где в результаты измерений суммарной псевдодальности и суммарной радиальной псевдоскорости РБ вносят соответствующие поправки, полученные на промежуточной орбите, и определяют для каждого ВИПа значения суммарной дальности ГИП-РБ-ВИП и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП. Накопленные в сеансах измерений текущие значения дальности и радиальной скорости РБ, полученные с ГИП, и значения суммарной дальности и суммарной радиальной скорости, полученные по измерениям с ВИП, используют для определения параметров реализованной (фактической) переходной орбиты.
Оценим технический результат применения предложенного способа траекторного контроля с многопутевыми измерениями по сравнению со способом траекторного контроля по технологии работы средств наземных пунктов в запросном режиме последовательно.
Типовая продолжительность сеанса измерений составляет 1200 секунд. Экспериментально установлено, что время установления режима измерений после начала излучения запросного сигнала с наземного пункта в среднем составляет 60 секунд. Тогда, при последовательном излучении запросного сигнала штатно применяемым пятипунктным измерительным комплексом (фиг. 1) в режиме полета орбитального блока без тепловой закрутки составит 900 секунд (суммарные потери времени сеанса - 300 секунд). При многопутевых измерениях (фиг. 2) главный измерительный пункт после окончания переходных процессов проводит измерения дальности и радиальной скорости в течение 1140 секунд, и каждый из четырех ВИП в это же время проводит измерение суммарной псевдодальности ГИП-РБ-ВИП и суммарной радиальной псевдоскорости РБ относительно ГИП и ВИП. Суммарное время траекторных измерений в сеансе составит 5700 секунд. За два плановых сеанса будет накоплено 11400 секунд измерений против 1800 секунд при последовательной работе измерительных пунктов на запрос, соответственно объем траекторных измерений, полученных на переходной орбите, будет в 6,3 раза большим.
На целевой (геопереходной) орбите реализуют программу измерений, совпадающую с программой на переходной орбите. Здесь при траекторном контроле по технологии многопутевых измерений также будет получен в 6,3 раза больший объем измерений по сравнению с траекторным контролем по технологии последовательной работы измерительных пунктов.
Полученные результаты способствуют дальнейшему развитию теоретических основ системного решения проблем математической интерпретации навигационной информации, использование которого способствует выработке согласованного направления развития средств траекторных измерений, обеспечивает учет априорной информации о параметрах контролируемых орбит ракет-носителей, разгонных блоков и космических аппаратов.
Основы математической интерпретации приведены в монографии Кукушкин С.С., Гладков И.А., Чаплинский B.C. Методы и информационные технологии контроля состояния динамических систем. - М.: Министерство обороны РФ, 2008. - 327 с, С. 43 - 83 [6]. Разработанные программно-математические комплексы математической интерпретации данных траекторных измерений и навигационных определений в баллистических центрах и центрах управления полетом КА обеспечивают решение следующих задач: формирования навигационных параметров КА и частотно-временных величин; учет текущих поправок на распространение сигналов в неоднородной среде (тропосфере и ионосфере); коррекцию измерений по данным калибровки и юстировки измерительных средств; фильтрацию данных измерений и другие преобразования измерительной информации, отражающие корреляционные зависимости получаемых данных и особенности их использования при обработке. Разработке инновационных технологий обработки измерительной информации были посвящены такие изобретения, как:
Кукушкин С.С. Способ первичной обработки информации с обнаружением и исправлением ошибок измерений / Патент №2658795, опубл. 22.06.2018, бюл. №18 [7] и Кукушкин С.С., Кузнецов В.И. Способ первичной обработки информации с использованием адаптивной нелинейной фильтрации / Патент №2672392, опубл. 14.11.2018, бюл. №32 [8].
Список использованных источников информации
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. Перова А.И. Харисова В.Н., издание четвертое перераб. и доп. - М.: Радиотехника, 2010 - 797 с., С. 371-373.
2. Космические траекторные измерения / Под ред. Агаджанова П.А., Дулевича В.Е., Коростелева А.А. - М.: Сов.радио, 1969, 504 с., п. 12.1, С. 463-469.
3. Радиосистемы управления / Под ред. Вейцеля В.А. - М.: Дрофа, 2005, 416 с. п. 2.3.2, С. 88-94.
4. Основы радионавигационных измерений. Под ред. Н.Ф. Клюева, Минобороны СССР, 1987, 429 с. п. 8. С. 354-396.
5. Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации, патент РФ №2759173, СПК B64G 1/002 и G08C 19/28, авторы Чаплинский B.C., Кукушкин С.С, Коновалов В.П., Прут В.И., заявка №2021108447 от 30.03.2021, опубл. 09.11.2021, бюл. №31.
6. Кукушкин С.С., Гладков И.А., Чаплинский B.C. Методы и информационные технологии контроля состояния динамических систем. - М.: Министерство обороны РФ, 2008. - 327 с, С. 43-83.
7. Кукушкин С.С. Способ первичной обработки информации с обнаружением и исправлением ошибок измерений /Патент №2658795, опубл. 22.06.2018, бюл. №18.
8. Кукушкин С.С., Кузнецов В.И. Способ первичной обработки информации с использованием адаптивной нелинейной фильтрации/Патент №2672392, опубл. 14.11.2018, бюл. №32.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| Космическая система траекторных измерений | 2019 |
|
RU2715069C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2520714C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2509041C1 |
| СПОСОБ КОСМИЧЕСКОЙ СВЯЗИ | 2012 |
|
RU2549832C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2011 |
|
RU2477836C1 |
| СПОСОБ ПРИЕМА И КОМПЛЕКСНОЙ ОБРАБОТКИ ДАННЫХ ОТ СПУТНИКОВЫХ НАВИГАЦИОННЫХ ПРИЕМНИКОВ КОСМИЧЕСКИХ АППАРАТОВ ДЛЯ ДИАГНОСТИКИ ВОЗМУЩЕНИЯ ИОНОСФЕРЫ И АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2564450C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
Изобретение относится к способам навигации космических аппаратов. Способ траекторного контроля многопунктным измерительным комплексом орбит выведения космических аппаратов на различные орбиты с использованием навигационных систем ГЛОНАСС/GPS. Определяют навигационные параметры разгонного блока, передают их на наземный комплекс, где определяют статистические оценки параметров орбиты. Проводят запросный траекторный сигнал и измеряют дальность и скорость разгонного блока. Получают уточненные оценки навигационных определений с использованием навигационных систем и многопунктного измерительного комплекса. Определяют поправки к измеренным значениям на ведомых наземных пунктах. Полученные данные используют для определения параметров орбит космических аппаратов. Достигается повышение объема получаемых измерений, точности и достоверности навигационных определений. 1 з.п. ф-лы, 2 ил.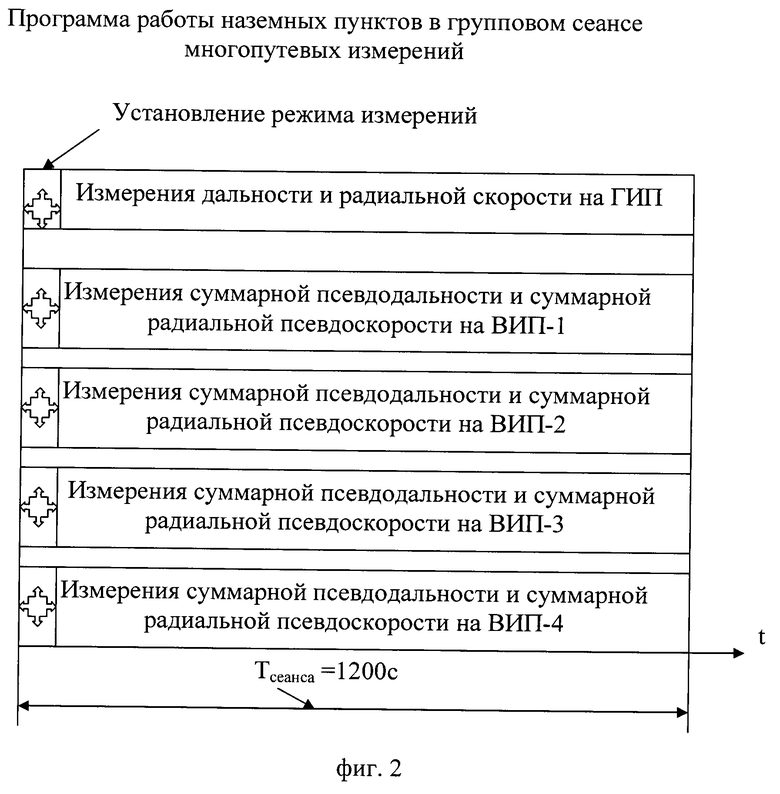
1. Способ траекторного контроля многопунктным измерительным комплексом многоимпульсных орбит выведения космических аппаратов на высокоэллиптические, геопереходные и геостационарные орбиты с использованием разгонных блоков, включающий прием на разгонном блоке сигналов средневысотных космических навигационных систем типа ГЛОНАСС/GPS на мерных участках полета в сплошном навигационном поле, характеризующимся тем, что в нем одновременно в зоне радиовидимости находятся не менее четырех космических аппаратов, излучающих навигационные сигналы, на основе которых осуществляют измерение навигационных параметров, выполняя следующую последовательность операций: определение текущих навигационных векторов разгонного блока, передачу накопленных на мерном интервале в сплошном навигационном поле текущих навигационных векторов разгонного блока по радиоканалам в наземный измерительный комплекс и определение в центре управления по текущим навигационным векторам статистических оценок параметров орбиты разгонного блока на мерном временном интервале, при этом производят излучение запросного траекторного сигнала и измерение на его основе дальности и радиальной скорости разгонного блока с одного из наземных пунктов, который определен в соответствии с планом измерений как главный в существующем многопунктном измерительном комплексе, а иные как ведомые, осуществляют комбинированное измерение с использованием космических навигационных систем (КНС) ГЛОНАСС/GPS на мерных участках полета разгонного блока, как в сплошном навигационном поле КНС ГЛОНАСС/GPS, так и вне его, отличающийся тем, что реализуют следующие операции получения уточненных комплексированных оценок навигационных определений с использованием КНС ГЛОНАСС/GPS и измерений, получаемых многопунктным измерительным комплексом (МИК): принимают на наземных пунктах измерительного комплекса, называемых ведомыми, сигнал ответа бортового приемоответчика на запросный траекторный сигнал главного наземного пункта на мерных участках полета разгонного блока в сплошном навигационного поле космических навигационных систем, измеряют суммарную псевдодальность на основе многопунктного измерительного комплекса по пути: главный наземный пункт - разгонный блок - ведомый наземный пункт  и суммарную радиальную псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов
и суммарную радиальную псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов  на основе которых определяют поправки к измеренным на ведомых наземных пунктах многопунктного измерительного комплекса значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем вычисления статистических оценок разности значений суммарной псевдодальности и суммарной радиальной псевдоскорости, измеренных на участке полета разгонного блока в сплошном навигационном поле, и их расчетных аналогов
на основе которых определяют поправки к измеренным на ведомых наземных пунктах многопунктного измерительного комплекса значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем вычисления статистических оценок разности значений суммарной псевдодальности и суммарной радиальной псевдоскорости, измеренных на участке полета разгонного блока в сплошном навигационном поле, и их расчетных аналогов  по статистическим параметрам орбиты, полученной в сплошном навигационном поле по навигационным векторам и принятой за эталонную, реализуя определение поправок по следующим формулам:
по статистическим параметрам орбиты, полученной в сплошном навигационном поле по навигационным векторам и принятой за эталонную, реализуя определение поправок по следующим формулам:

и
а, кроме того, принимают на ведомых наземных пунктах измерительного комплекса сигнал ответа бортового приемоответчика на запросный траекторный сигнал главного наземного пункта на мерных участках полета разгонного блока на орбитах выведения космических аппаратов вне сплошного навигационного поля космических навигационных систем, и на его основе измеряют суммарную псевдодальность по пути: главный наземный пункт - разгонный блок - ведомый наземный пункт  и суммарную радиальную псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов
и суммарную радиальную псевдоскорость разгонного блока относительно главного и ведомого наземных пунктов  определяют значения суммарной дальности
определяют значения суммарной дальности  и суммарной радиальной скорости
и суммарной радиальной скорости  по измеренным значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем ввода в них полученных поправок
по измеренным значениям суммарной псевдодальности и суммарной радиальной псевдоскорости путем ввода в них полученных поправок  по следующим формулам:
по следующим формулам:
и
после чего определяют параметры орбит выведения космических аппаратов с использованием измеренных на главном наземном пункте значений дальности и радиальной скорости разгонного блока и полученных значений суммарной дальности главный наземный пункт - разгонный блок - ведомый наземный пункт и суммарной радиальной псевдоскорости разгонного блока относительно главного и ведомого наземных пунктов.
2. Способ по п. 1, отличающийся тем, что вводят локальное дополнение к КНС ГЛОНАСС, которое состоит из группировки наземных управляемых навигационных станций (НУНС), размещенных на наземных пунктах с известными координатами с аппаратурой формирования навигационного сигнала КНС ГЛОНАСС последнего поколения, подобной той, что размещена на навигационных космических аппаратах (НКА), передают по каналу связи на наземные приемно-регистрирующие станции значения текущих навигационных векторов, которые определяют на мерных участках полета навигационной аппаратуры потребителя, установленной на разгонных блоках (РБ), обрабатывают в едином центре управления разгонными блоками полученные значения текущих навигационных векторов и определяют на их основе параметры орбиты выведения космического аппарата.
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| US 7557753 B2, 07.07.2009 | |||
| EP 3169003 B1, 23.05.2018 | |||
| ВЫСОКОСКОРОСТНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ИНФОРМАЦИИ С КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ С АДАПТИВНОЙ БОРТОВОЙ АППАРАТУРОЙ | 2014 |
|
RU2551900C1 |
| СПОСОБ БАЛЛИСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ МОНИТОРИНГА КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787796C1 |

