Изобретение относится к области космонавтики, а именно к технике формирования траекторных измерений, определения параметров движения ИСЗ по этим измерениям, оценки точности прогнозирования параметров движения ИСЗ на заданный интервал прогноза.
Изобретение может быть использовано в наземных и бортовых комплексах управления для контроля точности прогнозирования параметров движения ИСЗ, а также для оценки точности прогнозирования параметров движения ИСЗ на этапе эскизного проектирования.
Из уровня техники известны системы и способы прогнозирования параметров движения ИСЗ и оценки точности прогнозирования параметров орбиты ИСЗ (см. например [л1], [л2], [л3], [л4], [л5], [л6], [л7]).
Недостатками известных из уровня техники технических решений являются:
1) апостериорные оценки точности прогнозирования параметров могут быть получены только для определенного класса ИСЗ, которые имеют конкретные параметры орбиты (оценки могут быть получены только для узкого круга орбит ИСЗ, которые находятся в штатной эксплуатации);
2) определение параметров движения ИСЗ осуществляется по выборке реальных траекторных измерений, в которой может иметь место неизвестное количество аномальных измерений, которые искажают исходную статистическую гипотезу о погрешностях траекторных измерений, что в свою очередь искажает оценки точности определения и прогнозирования параметров движения орбиты ИСЗ;
3) для определения и прогнозирования параметров орбиты ИСЗ используются траекторные измерения измерительных средств, которые получают на штатных циклах траекторного контроля параметров орбиты ИСЗ. При этом, чтобы оценить точность определения и прогнозирования параметров ИСЗ необходимо набрать статистику не менее чем на 30-ти штатных циклах траекторного контроля, один штатный цикл является одной реализацией статистической обработки параметров движения ИСЗ.
Заявленное техническое решение направлено на устранение вышеуказанных недостатков.
При эскизном проектировании необходимо иметь априорные оценки точности прогнозирования параметров орбит для широкого класса ИСЗ (низкоорбитальных, среднеорбитальных, высокоорбитальных ИСЗ). Для этого предлагается техническое решение, в котором траекторные измерения моделируются в соответствии с исходными данными. В исходных данных задаются погрешности траекторных измерений, мерный интервал, измеряемый параметр и другие параметры.
При моделировании погрешности траекторных измерений формируются с помощью датчика случайных чисел, поэтому закон распределения траекторных измерений с увеличением объема измерений стремится к нормальному. С повышением количества реализации увеличивается точность и надежность полученных оценок точности определения и прогнозирования параметров движения ИСЗ.
Целью заявленного технического решения является повышение точности и надежности оценивания прогнозных значений параметров движения широкого класса ИСЗ, что обеспечивается за счет увеличения задаваемых параметров, необходимых для оценки и увеличения количества реализации при моделировании траекторных измерений.
Технический результат заявленного технического решения заключается в обеспечении получения оценок точности прогнозирования параметров орбит на интервале прогноза для любого класса ИСЗ (низкоорбитальных, среднеорбитальных и высокоорбитальных ИСЗ), а также в обеспечении контроля точности прогнозирования параметров орбит ИСЗ в процессе штатной эксплуатации космических систем в наземных и бортовых комплексах управления.
Технический результат достигается тем, что система оценивания точности прогнозирования параметров движения ИСЗ содержит блок исходных данных, вход которого является входом системы, блок прогнозирования параметров движения ИСЗ, блок расчета значений измеряемого параметра, блок определения параметров движения ИСЗ, блок оценки точности прогнозирования параметров движения ИСЗ, блок моделирования траекторных измерений, при этом первый выход блока исходных данных соединен со вторым входом блока моделирования траекторных измерений, выход которого соединен с первым входом блока определения параметров движения ИСЗ, второй выход блока исходных данных соединен с входом блока прогнозирования параметров движения ИСЗ и с выходом блока определения параметров движения ИСЗ, третий выход блока исходных данных соединен с входом блока расчета значений измеряемого параметра, с третьим входом блока определения параметров движения ИСЗ и с первым входом блока оценки точности прогнозирования параметров движения ИСЗ, выход блока расчета значений измеряемого параметра соединен с первым входом блока моделирования траекторных измерений и с вторым входом блока определения параметров движения ИСЗ, второй выход блока прогнозирования параметров движения ИСЗ соединен с вторым входом блока оценки точности прогнозирования параметров движения ИСЗ, выход которого является выходом системы оценивания.
Признаки и сущность настоящего изобретения поясняются в последующем детальном описании, иллюстрируемом чертежом (фиг.1), где показано следующее:
Фиг.1 - блок-схема системы оценивания точности прогнозирования параметров движения ИСЗ, содержащая следующие блоки:
1 - блок исходных данных;
2 - блок прогнозирования параметров движения ИСЗ;
3 - блок моделирования траекторных измерений;
4 - блок расчета значений измеряемого параметра;
5 - блок определения параметров движения ИСЗ;
6 - блок оценки точности прогнозирования параметров движения ИСЗ.
Блок исходных данных (поз.1) представляет собой запоминающее устройство, куда записывается информация, используемая в блоках системы.
Для блока моделирования траекторных измерений (поз.3) формируются и записываются следующие исходные данные.
Погрешности траекторных измерений для моделирования:
- аппаратурные (инструментальные) погрешности измерительных средств;
- погрешности за счет среды распространения радиосигнала от ИСЗ до измерительного средства;
- погрешности временной привязки траекторных измерений;
- погрешности положения фазовых центров бортовой антенны и антенны наземного измерительного средства;
- количество составляющих погрешностей траекторных измерений (возможны и другие данные).
Каждая погрешность траекторных измерений представлена в виде систематической и случайной составляющих.
Для блока прогнозирования параметров движения ИСЗ (поз.2) и блока расчета значений измеряемого параметра (поз.4) формируется и записывается следующая исходная информация:
- опорные начальные условия параметров движения ИСЗ;
- мерный интервал работы измерительных средств с ИСЗ, который в зависимости от высоты ИСЗ задается в виде определенного количества мерных витков, сеансов измерений, зон радиовидимости и др.;
- каталог и координаты измерительных средств, которые используются для проведения радиоконтроля параметров орбит ИСЗ;
- каталог координат измерительных средств, которые представлены в виде широты, долготы и высоты;
- метод интегрирования;
- шаг интегрирования;
- интервал прогноза;
- темп измерений;
- угол места для антенны измерительного средства, с которого рассчитывается расчетная дальность;
- масса ИСЗ (возможны и другие данные).
Для блока определения параметров движения ИСЗ (поз.5) и блока оценки точности прогнозирования параметров движения ИСЗ (поз.6) формируется и записывается в блок исходных данных (поз.1) следующая информация:
- опорные начальные условия параметров движения ИСЗ;
- состав уточняемых параметров;
- количество реализации.
Блок исходных данных (поз.1) имеет один вход, который является входом заявленной системы и три выхода. Исходные данные для каждого блока системы в виде специального задания вводятся в блок исходных данных (поз.1), записываются в определенное место в поле памяти и затем считываются в каждый блок отдельно через свой соответствующий выход.
Блок прогнозирования параметров движения ИСЗ (поз.2) представляет собой вычислительное устройство, которое по исходным данным (исходной информации) с использованием системы уравнений движения ИСЗ, записанной в виде векторного уравнения, осуществляет расчет прогнозируемых параметров ИСЗ. Векторное уравнение представляет собой модель движения центра масс ИСЗ вокруг некоторого небесного тела, называемого основным. Построение модели движения центра масс ИСЗ базируется на составление системы объективных дифференциальных уравнений. Задача решается в прямоугольной системе координат, начало которой совпадает с центром масс основного притягивающего тела. Выбор такого тела обычно определяется характером движения рассматриваемого ИСЗ. Так для искусственных спутников планет за основное небесное тело обычно принимают соответствующую планету.
Векторное уравнение может быть представлено следующим соотношением:

где r - вектор, определяющий положение ИСЗ в принятой системе координат;
ri (i=1, 2,…, N) - векторы, составленные из координат всех окружающих небесных тел, кроме основного, притяжение к которому учитывается при решении задачи;
N - число окружающих небесных тел;
M0 - масса основного притягивающего тела;
µ0 - произведение массы притягивающего тела на гравитационную постоянную;
µi (i=1, 2,…, N) - произведение масс окружающих небесных тел на гравитационную постоянную;
P - сумма дополнительных сил, действующих на ИСЗ, т.е. всех сил, за исключением притяжения к центрам рассматриваемых небесных тел;
P0 - сумма дополнительных сил, действующих на основное тело;
M - масса КА.
Величины N, M0, µ0, µi, P, P0 записываются в память вычислительного устройства, они являются постоянными (константами).
На выходе блока прогнозирования параметров движения ИСЗ (поз.2) выдаются прогнозируемые параметры движения ИСЗ на заданный интервал, а также текущее положение измерительных средств в геоцентрической прямоугольной системе координат на текущее время.
Блок расчета значений измеряемого параметра (поз.4).
Данный блок является вычислителем значений измерений дальности для заданной группировки измерителей дальности и для ИСЗ с конкретными параметрами, задаваемыми начальными условиями. В нем определяются расчетные значения измеряемого параметра, в качестве которых используется дальность.
Для функционирования этого блока используются следующие исходные данные:
- текущие координаты ИСЗ и измерительных средств для расчета дальности, которые поступают из блока прогнозирования с текущим временем и с заданным темпом Δt;
- величина угла места для антенн измерителей дальности, с которого начинается и заканчивается зона радиовидимости;
- мерный интервал, на котором рассчитываются дальности.
Расчетная дальность Dиj от фазового центра антенны измерителя дальности до фазового центра бортовой антенны определяется с использованием соотношения:

где j=1, 2,…, N; N - количество измерений на мерном интервале;
XjKA, YjKA, ZjKA - текущие координаты ИСЗ с заданным темпом Δt в прямоугольной геоцентрической системе координат;
XjИ, YjИ, ZjИ - текущие координаты измерительного средства с заданным темпом Δt в прямоугольной геоцентрической системе координат.
С выхода блока (поз.4) выдается выборка текущих расчетных значений дальности с заданным темпом на мерном интервале. Данная выборка расчетных дальностей поступает на первый вход блока моделирования траекторных измерений, а также поступает на второй вход блока определения параметров движения ИСЗ (поз.5) для расчета невязок на первом сближении при решении краевой задачи.
В блоке моделирования траекторных измерений (поз.3) формируется выборка моделируемых траекторных измерений, возмущенных погрешностями. Данная выборка формируется с использованием следующего формульного соотношения:

где j=1, 2,…, N; N - количество моделируемых траекторных измерений в выборке на мерном интервале;
р=1, 2,…, m; m - количество составляющих погрешностей измерений;
 - суммарная текущая j-я погрешность за счет всех составляющих;
- суммарная текущая j-я погрешность за счет всех составляющих;
Dиj - расчетное текущее j-e измерение дальности;
Dj - моделируемое текущее j-e измерение дальности, возмущенное погрешностями.
Выборка моделируемых траекторных измерений формируется с использованием соотношения (3) следующим образом:
На первый вход блока моделирования (поз.3) поступает выборка расчетных значений измерений дальности Dиj с заданным темпом Δt на мерном интервале для каждого измерителя дальности, которая запоминается в этом блоке.
При записи в память каждого j-го расчетного значения дальности Dиj в специальном счетчике расчетных измерений дальности фиксируется их текущее количество и после записи всей выборки расчетных измерений дальности в этом счетчике будет зафиксировано общее количество расчетных измерений дальности на мерном интервале N.
На второй вход блока моделирования (поз.3) поступают статистические характеристики погрешностей траекторных измерений из блока исходных данных, которые запоминаются в этом блоке, причем систематические и случайные погрешности записываются в память блока отдельно.
Кроме этого в память блока записывается количество составляющих погрешностей траекторных измерений Р.
В блок моделирования (поз.3) включены два датчика случайных чисел. Для одного датчика исходной информацией являются статистические характеристики систематических погрешностей, а для другого - статистические характеристики случайных погрешностей траекторных измерений.
На один датчик из запоминающего устройства поступают статистические характеристики систематических погрешностей, на другой датчик из запоминающего устройства поступают статистические характеристики случайных погрешностей траекторных измерений. Датчики формируют погрешности синхронно и выдают их на два входа сумматора погрешностей траекторных измерений, причем систематическую погрешность - на первый вход, а случайную погрешность - на другой. Затем с выхода сумматора погрешностей текущая суммарная погрешность  поступает на первый вход сумматора формирования моделируемых измерений, а на второй вход этого сумматора поступает текущая расчетная дальность Dиj.
поступает на первый вход сумматора формирования моделируемых измерений, а на второй вход этого сумматора поступает текущая расчетная дальность Dиj.
Таким образом, с выхода сумматора формирования моделируемых измерений выдается текущее моделируемое траекторное измерение дальности, возмущенное погрешностями измерений и затем записывается в запоминающее устройство. Одновременно в счетчике моделируемых измерений дальности фиксируется текущее количество моделируемых измерений.
Процесс формирования моделируемых траекторных измерений завершается при условии равенства количества расчетных измерений дальности и количества моделируемых измерений дальности. После этого выборка моделируемых траекторных измерений дальности с выхода блока моделирования (поз.3) поступает на первый вход блока определения параметров движения ИСЗ (поз.5). Таким образом, на выходе блока моделирования (поз.3) сформирована текущая К-я выборка моделируемых траекторных измерений на заданном мерном интервале.
Блок определения параметров движения ИСЗ (поз.5).
В качестве исходных данных для определения параметров движения ИСЗ в этом блоке используются:
- опорные начальные условия параметров движения ИСЗ, которые поступают на третий вход блока;
- выборка моделируемых траекторных измерений на мерном интервале, которая поступает из блока моделирования траекторных измерений, которая поступает на первый вход блока;
- состав уточняемых параметров.
Для определения (уточнения) параметров движения ИСЗ используется метод наименьших квадратов (алгоритм фильтрации).
Алгоритм фильтрации по методу наименьших квадратов сводится к отысканию оценки q0 из условия достижения минимума квадратичной формы:

где δ - вектор невязок между моделируемыми траекторными измерениями и их расчетными значениями;
К-1 - положительно определяемая корреляционная матрица.
Блок определения параметров движения ИСЗ (поз.5) представляет собой вычислительное устройство, в котором реализован алгоритм фильтрации по методу наименьших квадратов, позволяющий определить параметры движения ИСЗ по выборке моделируемых траекторных измерений, полученных на заданном мерном интервале. Одна выборка моделируемых траекторных измерений на мерном интервале считается одной реализацией.
На выходе блока определения параметров движения ИСЗ (поз.5) выдаются уточненные параметры движения ИСЗ (уточненные начальные условия параметров движения ИСЗ) q0i, в К-й реализации, где К=1, 2,…, n.
Уточненные начальные условия поступают на вход блока оценки прогнозирования параметров движения ИСЗ.
Блок оценки точности прогнозирования параметров движения ИСЗ (поз.6).
В качестве исходных данных на первый вход блока подают прогнозируемые параметры опорных начальных условий ИСЗ  , рассчитанные на заданный интервал прогноза из блока прогнозирования параметров движения ИСЗ и количество реализации n из блока исходных данных, которое запоминают. На второй вход поступают прогнозируемые параметры уточненных начальных условий ИСЗ
, рассчитанные на заданный интервал прогноза из блока прогнозирования параметров движения ИСЗ и количество реализации n из блока исходных данных, которое запоминают. На второй вход поступают прогнозируемые параметры уточненных начальных условий ИСЗ  , также из блока прогнозирования параметров движения ИСЗ, рассчитанные на тот же интервал прогноза.
, также из блока прогнозирования параметров движения ИСЗ, рассчитанные на тот же интервал прогноза.
Оценка точности прогнозирования параметров движения ИСЗ на заданный интервал прогнозирования производится путем статистической обработки погрешностей  уточненных параметров движения ИСЗ
уточненных параметров движения ИСЗ  от опорных значений
от опорных значений 

В блоке оценки точности прогнозирования параметров движения ИСЗ по n реализациям рассчитывают математическое ожидание  и среднеквадратическое отклонение
и среднеквадратическое отклонение  погрешностей, которые являются оценками точности прогнозирования параметров движения ИСЗ на заданный интервал прогноза и являются также выходными параметрами заявленной системы оценивания.
погрешностей, которые являются оценками точности прогнозирования параметров движения ИСЗ на заданный интервал прогноза и являются также выходными параметрами заявленной системы оценивания.
Для фиксации текущего количества реализации в блоке оценки точности прогнозирования параметров движения ИСЗ (поз.6) установлен счетчик.
Работа устройства оценивания точности прогнозирования параметров движения ИСЗ осуществляется следующим образом.
На вход блока исходных данных, который является входом системы, поступает входная информация для оценивания точности прогнозирования параметров движения ИСЗ. В качестве входных данных используется специальное задание, которое для каждого блока системы формируется и записывается в блок исходных данных отдельно.
Для блока моделирования траекторных измерений формируются количество составляющих погрешностей и величины самих погрешностей, которые представляются в виде систематической и случайной погрешностей.
Для блока прогнозирования параметров движения ИСЗ формируются опорные начальные условия, мерный интервал, каталог измерительных средств и их координаты, а также задаются метод и шаг интегрирования, интервал прогноза, темп измерений, масса ИСЗ и другие данные.
Для блока определения параметров движения ИСЗ формируются опорные начальные условия, состав уточняемых параметров, а для оценки точности прогнозирования параметров движения ИСЗ задается количество реализации.
Указанная выше информация с выходов блока исходных данных выдается на соответствующие блоки системы оценивания.
В блоке прогнозирования движения ИСЗ по заданным опорным начальным условиям на заданное текущее время tj, где j=1, 2,…, N, tj>tну, для заданного состава измерительных средств с заданным темпом измерений Δt рассчитываются координаты ИСЗ и координаты измерительных средств в прямоугольной геоцентрической системе координат. Эти данные поступают на вход блока расчета значений измеряемого параметра.
В блоке расчета значений измеряемого параметра с использованием заданного угла места для наземных антенн ИС, с которого начинается и заканчивается мерный интервал, определяют текущую расчетную дальность. В качестве исходных данных из блока прогнозирования параметров движения ИСЗ на вход блока поступают текущие координаты ИСЗ и ИС, которые дают возможность по формуле (2) рассчитать дальность от измерительного средства до ИСЗ с заданным темпом на заданном мерном интервале.
Выборку расчетных дальностей Dиj, где j=1, 2,…, N, N - количество измерений на мерном интервале, подают на первый вход блока моделирования траекторных измерений, где эту выборку запоминают. Затем каждую j-ю текущую расчетную дальность возмущают погрешностями измерений, которые формируют с помощью датчиков случайных чисел в соответствии с формульным соотношением (3). При этом суммарная погрешность моделируемых измерений дальности включает количество составляющих погрешностей m, которое задано в исходных данных и которое поступает вместе со статистическими характеристиками погрешностей на второй вход блока моделирования из блока исходных данных.
На выходе блока моделирования формируют к-ю выборку моделируемых траекторных измерений на мерном интервале Dj, которую подают на первый вход блока определения параметров движения ИСЗ.
На второй вход блока определения параметров движения ИСЗ подают выборку расчетных дальностей, а на третий вход подают опорные начальные условия параметров движения ИСЗ и состав уточняемых параметров, которые поступают с третьего выхода блока исходных данных.
В блоке определения параметров движения ИСЗ уточняют начальные условия в соответствии с заданным составом уточняемых параметров движения ИСЗ с использованием формульного соотношения (5). Процесс фильтрации по методу наименьших квадратов завершают при выполнении условия:
 ,
,
где b - допустимая величина погрешности, которую не должна превышать величина невязок δ в к-й выборке. Если величина невязок δ больше допустимой величины b, то уточненные начальные условия на данной итерации с выхода блока определения поступают на вход блока прогнозирования параметров движения ИСЗ, где с использованием формулы (1) рассчитывают прогнозируемые параметры движения ИСЗ, а также текущее положение измерительных средств в геоцентрической прямоугольной системе координат с заданным темпом. Затем эти данные поступают на вход блока расчета значений измеряемого параметра, где по формуле (2) рассчитывают дальности на данной итерации на мерном интервале. С выхода блока расчета значений измеряемого параметра выборка расчетных измерений дальности поступает в блок определения параметров движения ИСЗ. И это происходит до тех пор, пока не будет выполнено условие (6). При выполнении условия (6) уточненные начальные условия q0i, полученные в к-й реализации, подают на вход блока прогнозирования параметров движения ИСЗ, где на заданный интервал прогноза по уточненным НУ рассчитывают прогнозируемые параметры ИСЗ, которые затем с второго выхода этого блока поступают на второй вход блока оценки точности прогнозирования параметров движения ИСЗ.
На первый вход блока оценки точности прогнозирования поступают прогнозируемые параметры движения ИСЗ, которые рассчитывают по опорным НУ на заданный интервал прогноза в блоке прогнозирования параметров движения ИСЗ. Из блока исходных данных на первый вход блока оценки точности прогнозирования подают количество реализации, по которым проводят статистическую оценку.
В блоке оценки точности прогнозирования параметров движения ИСЗ по формуле (5) определяют погрешности  в к-й реализации и запоминают величины этих погрешностей в запоминающем устройстве. Кроме этого счетчик в этом блоке фиксирует текущее к-е значение количества реализации. Текущее к-е значение количества реализации сравнивают с заданным количеством реализации n, которое записано в память данного блока.
в к-й реализации и запоминают величины этих погрешностей в запоминающем устройстве. Кроме этого счетчик в этом блоке фиксирует текущее к-е значение количества реализации. Текущее к-е значение количества реализации сравнивают с заданным количеством реализации n, которое записано в память данного блока.
В случае, если к≠n, то в блоке моделирования траекторных измерений по формуле (3) формируют очередную выборку моделируемых измерений, которая поступает в блок определения параметров движения ИСЗ. По этой очередной выборке по формуле (4) уточняют начальные условия, которые поступают в блок прогнозирования параметров движения ИСЗ и одновременно в счетчике фиксируют текущее к-е количество реализации.
В блоке прогнозирования рассчитывают прогнозируемые параметры движения ИСЗ по текущим уточненным НУ на заданный интервал прогноза. Эти текущие прогнозируемые параметры, рассчитанные по уточненным НУ с второго выхода блока подают на второй вход блока оценки точности прогнозирования.
С первого выхода блока прогнозирования на первый вход блока оценки точности прогнозирования подают прогнозируемые параметры, рассчитанные по опорным НУ на тот же интервал прогноза.
По формуле (5) рассчитывают погрешности прогнозируемых параметров  начальных условий, затем текущее к-е количество реализации сравнивают с заданным количеством реализации n. При выполнении условия n=k процесс формирования очередной выборки моделируемых траекторных измерений заканчивают и в блоке оценки точности прогнозирования рассчитывают оценки точности прогнозирования параметров движения ИСЗ, математическое ожидание
начальных условий, затем текущее к-е количество реализации сравнивают с заданным количеством реализации n. При выполнении условия n=k процесс формирования очередной выборки моделируемых траекторных измерений заканчивают и в блоке оценки точности прогнозирования рассчитывают оценки точности прогнозирования параметров движения ИСЗ, математическое ожидание  и среднеквадратическое отклонение
и среднеквадратическое отклонение  по n реализациям.
по n реализациям.
Полученные оценки точности прогнозирования параметров движения ИСЗ на заданный интервал прогноза являются выходным результатом системы оценивания.
Источники информации
1) Патент на изобретение RU 2313104 С2, (ЗАО «НПО КОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ»), опубл. 20.12.2007, «СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ГЕОСТАЦИОНАРНОГО СПУТНИКА» - /Л1/.
2) Патент на изобретение RU 2279105 С2, (МАМОШИН В.Р.), опубл. 27.06.2006, «КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ АВИАЦИОННО-КОСМИЧЕСКИХ ОБЪЕКТОВ, НАБЛЮДАЕМЫХ ГРУППИРОВКОЙ СТАНЦИЙ СЛЕЖЕНИЯ» - /Л2/.
3) Патент на изобретение RU 2150414 С1, (ГУП ЦНИИ «КОМЕТА»), опубл. 10.06.2000, «СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА» - /Л3/.
4) Патент на изобретение US 5909381 A, (ITT MFG ENTERPRISES INC. (US)), опубл. 01.06.1999, «СИСТЕМА И СПОСОБ ПРОГНОЗИРОВАНИЯ ТРАЕКТОРИИ СПУТНИКА» - /Л4/.
5) Заявка на изобретение US 2002065587 A1, (NOKIA MOBILE PHONES, LTD ET ALL. (FI)), опубл. 30.05.2002, «СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СПУТНИКА» - /Л5/.
6) Заявка на изобретение WO 2008055223 А2, (SIRF TECH INC. (US)), опубл. 08.05.2008, «СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СПУТНИКА» - /Л6/.
7) Патент на изобретение US 6417798 В1, (ASTRIUM GMBH (DE)), опубл. 09.07.2002, «СИСТЕМА И СПОСОБ ДЛЯ РЕГУЛИРОВАНИЯ И КОНТРОЛЯ СПУТНИКА» - /Л7/.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ПОМЕХОЗАЩИЩЕННОСТИ НАВИГАЦИОННОГО КОНТУРА ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ (ИСЗ) | 2010 |
|
RU2444752C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА НИЗКИХ ОРБИТАХ, ПОДВЕРЖЕННОГО ВЛИЯНИЮ ТОРМОЖЕНИЯ В АТМОСФЕРЕ | 2011 |
|
RU2463223C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЕМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2709978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2002 |
|
RU2215264C1 |
| Способ имитационного статистического моделирования локомотивной интегрированной системы навигации | 2017 |
|
RU2658509C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЁМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711834C1 |
| БОРТОВАЯ СИСТЕМА НАВИГАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2013 |
|
RU2575302C2 |
Изобретение относится к технике формирования траекторных измерений, определения параметров движения ИСЗ по этим измерениям и оценки точности прогнозирования движения ИСЗ на заданном интервале. Система содержит блоки: исходных данных (1), вход которого является входом системы, прогнозирования параметров движения ИСЗ (2), моделирования траекторных измерений (3), расчета значений измеряемого параметра (4), определения параметров движения ИСЗ (5), оценки точности прогнозирования параметров движения ИСЗ (6), выход которого является выходом системы. Входы и выходы блоков связаны друг с другом, как показано на схеме. Техническим результатом изобретения является повышение точности и надежности прогнозирования параметров движения широкого класса ИСЗ, с обеспечением оценок точности прогнозирования этих параметров для любого класса ИСЗ (низкоорбитальных, среднеорбитальных и высокоорбитальных). 1 ил.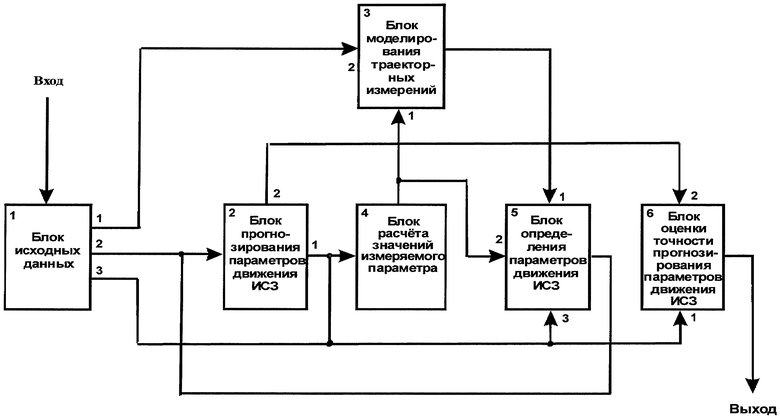
Система оценивания точности прогнозирования параметров движения искусственного спутника Земли (ИСЗ), содержащая блок исходных данных, вход которого является входом системы, блок прогнозирования параметров движения ИСЗ, блок расчета значений измеряемого параметра, блок определения параметров движения ИСЗ, блок оценки точности прогнозирования параметров движения ИСЗ, блок моделирования траекторных измерений, при этом первый выход блока исходных данных соединен со вторым входом блока моделирования траекторных измерений, выход которого соединен с первым входом блока определения параметров движения ИСЗ, второй выход блока исходных данных соединен с входом блока прогнозирования параметров движения ИСЗ и с выходом блока определения параметров движения ИСЗ, третий выход блока исходных данных соединен с входом блока расчета значений измеряемого параметра, с третьим входом блока определения параметров движения ИСЗ и с первым входом блока оценки точности прогнозирования параметров движения ИСЗ, первый выход блока прогнозирования параметров движения ИСЗ соединен с третьим входом блока определения параметров движения ИСЗ и с первым входом блока оценки точности прогнозирования параметров движения ИСЗ, выход блока расчета значений измеряемого параметра соединен с первым входом блока моделирования траекторных измерений и с вторым входом блока определения параметров движения ИСЗ, второй выход блока прогнозирования параметров движения ИСЗ соединен со вторым входом блока оценки точности прогнозирования параметров движения ИСЗ, выход которого является выходом системы оценивания.
| US 6417798 В1, 09.07.2002 | |||
| US 5909381 А, 01.06.1999 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2150414C1 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ АВИАЦИОННО-КОСМИЧЕСКИХ ОБЪЕКТОВ, НАБЛЮДАЕМЫХ ГРУППИРОВКОЙ СТАНЦИЙ СЛЕЖЕНИЯ | 2004 |
|
RU2279105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ГЕОСТАЦИОНАРНОГО СПУТНИКА | 2005 |
|
RU2313104C2 |
| Основы теории полета и элементы проектирования искусственных спутников Земли | |||
| Под ред | |||
| М.К.ТИХОНРАВОВА | |||
| - М.: Машиностроение, 1974, с.207-252. | |||

