Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений и определения параметров орбиты космического аппарата (КА), и может быть использовано на наземных и бортовых комплексах управления для точного определения текущих параметров движения КА на низкой околокруговой орбите искусственного спутника Земли.
Известен способ определения параметров орбиты КА, при котором выполняют траекторные измерения на двух мерных интервалах полета КА в зоне наблюдений одного или двух измерительных пунктов, статистическую обработку на ЭВМ совокупности траекторных измерений с определением шести значений траекторных параметров, соответствующих наилучшим образом (в смысле применяемого критерия оптимизации) совокупности обработанных траекторных измерений, по полученным шести значениям траекторных параметров определяют параметры орбиты КА, при этом для исключения аномальных измерений применяют процедуру пороговой фильтрации, причем величину порога назначают по априорным данным об ошибках измерения или по апостериорным данным результатов обработки измерений [1].
Недостатком этого способа является низкая точность определения параметров орбиты КА за пределами мерных интервалов.
Наиболее близким по технической сущности является способ определения орбиты КА, заключающийся в выполнении траекторных измерений на нескольких витках полета КА с одного или нескольких наземных измерительных пунктов, передаче на ЭВМ комплекса управления измеренных значений траекторных параметров, накапливании их на магнитных запоминающих устройствах ЭВМ, совместной их статистической обработке (решения краевой задачи), в результате чего определяют параметры орбиты и среднее значение баллистического коэффициента КА, при этом для исключения аномальных измерений применяют "правило трех сигм", причем на каждом последующем приближении решения краевой задачи выполняют уточнение нижних пороговых границ аномальных измерений с учетом апостериорных данных обработки предшествующего приближения, полученные значения параметров орбиты и баллистического коэффициента применяют для прогнозирования значений параметров орбиты КА на задаваемый момент времени [2].
Недостатками этого способа являются: большой объем вычислений на ЭВМ, необходимость выполнения нескольких сеансов связи с КА на суточном интервале полета для точного определения текущих параметров низкой орбиты, возможность появления случаев, когда исключаются все или почти все измерения как аномальные из-за неправильных априорных данных исходной статистической гипотезы, некорректных данных начального приближения, больших систематических ошибок измерений.
Целью изобретения является сохранение объема информации, необходимого для проведения расчетов параметров орбиты КА, при уменьшенном количестве сеансов связи.
Поставленная цель достигается за счет того, что в способе определения параметров орбиты КА, заключающемся в выполнении измерений траекторных параметров, передаче на комплекс управления совокупности измеренных значений траекторных параметров с последующим их накапливанием и обработкой, накопление в сеансе связи значения траекторных параметров обрабатывают по методу наименьших квадратов, причем после окончания итерационного процесса решения нелинейной системы проверяют состоятельность исходной статистической гипотезы по критерию "хи-квадрат", исключают отдельные аномальные значения, корректируют точность измерений обрабатываемых траекторных параметров, после чего циклически повторяют обработку до ее завершения и получения оптимальной оценки орбитальных параметров движения КА в зоне измерений выполненного сеанса связи, при этом обработку траекторных параметров выполняют дважды, причем после первой обработки выделяют и запоминают на магнитных накопителях вычислительного устройства значения наклонения и долготы восходящего узла средней прецессирующей плоскости орбиты, полученные в текущем сеансе связи значения наклонения и долготы восходящего узла и накопленные на предшествующем интервале полета КА до нескольких десятков суток их значения фильтруют по критерию метода наименьших квадратов, в цикле с применением критерия "хи-квадрат" исключают аномальные их значения в отдельных сеансах связи и получают уточненные значения наклонения и долготы восходящего узла средней прецессирующей орбиты в текущем сеансе связи, при последующей обработке траекторных параметров полученные уточненные значения наклонения и долготы восходящего узла берут в качестве известных значений и определяют оптимальные оценки радиуса, вектора и наклона скорости, аргумента широты КА в средней прецессирующей орбите, их запоминают на магнитных накопителях, полученные в текущем сеансе связи оценки радиуса, вектора и наклона скорости, аргумента широты совместно с такими же оценками, накопленными на предшествующем интервале полета КА до нескольких суток, фильтруют по критерию метода наименьших квадратов, в цикле с применением критерия "хи-квадрат" исключают аномальные оценки отдельных сеансов связи, перенастраивают фильтр с учетом апостериорных данных, получают уточненные значения радиуса, вектора и наклона скорости, аргумента широты КА в текущем сеансе связи и оценку торможения КА в атмосфере на обрабатываемом участке его полета, уточненные значения радиуса, вектора и наклона скорости, аргумента широты КА в текущем сеансе связи и оценку торможения КА в атмосфере совместно с уточненными значениями наклонения и долготы восходящего узла используют в качестве начальных условий для прогнозирования параметров средней орбиты, причем для определения истинных координат КА на заданный момент дополнительно определяют и учитывают периодические возмущения средней орбиты в гравитационном поле Земли в задаваемый момент, а полученные в результате второй обработки траекторных параметров остаточные невязки метода наименьших квадратов принимают за оценки ошибок траекторных измерений и запоминают на магнитных носителях, накопленные оценки ошибок периодически обрабатывают совместно и выделяют систематические составляющие ошибок траекторных измерений, которые учитывают в последующих сеансах связи при первой и второй обработке траекторных параметров.
На чертеже приведена последовательность действий над обрабатываемыми данными в заявленном способе определения параметров орбиты КА.
На позициях чертежа обозначены
1 - КА;
2 - параметры орбиты КА. Например, это могут быть радиус, наклонение и долгота восходящего узла орбиты, значения вектора и наклонения скорости КА, аргумент широты на момент времени, на который отнесены параметры. Дополнительным может быть параметр, определяющий торможение КА в атмосфере;
3 - траекторные измерения;
4 - накопленные в сеансе связи значения траекторных параметров. Например, это могут быть значения D'-радиальной скорости, а также Alf и Bet - соответственно углов азимута и места КА относительно РЛС, выполняющей траекторные измерения;
5 - первая обработка траекторных параметров;
6 - значения наклонения и долготы восходящего узла орбиты, соответствующие оптимальной оценке параметров движения КА в зоне выполненных измерений;
7 - фильтрация плоскости орбиты;
8 - уточненные значения наклонения и долготы восходящего узла в текущем сеансе связи;
9 - вторая обработка траекторных параметров;
10 - значения радиуса, вектора и наклона скорости, аргумента широты, соответствующие второй оптимальной оценке параметров движения КА в зоне выполненных измерений;
11 - фильтрация орбитальных параметров движения КА в плоскости средней прецессирующей орбиты;
12 - уточненные значения радиуса, вектора и наклона скорости, аргумента широты в текущем сеансе связи и оценка торможения КА в атмосфере на участке выполненной обработки;
13 - начальные условия для прогнозирования движения КА;
14 - прогнозирование параметров на заданный момент времени;
15 - остаточные невязки метода наименьших квадратов;
16 - периодическая обработка накопленных оценок ошибок траекторных измерений;
17 - оценка систематических составляющих ошибок траекторных измерений.
Способ реализуется следующим образом.
В сеансе связи с КА (1), функционирующим на орбите с параметрами (2), выполняют траекторные измерения (3), в результате которых получают значения (4) траекторных параметров. Обычно значения (4) соответствуют ряду назначаемых в зоне измерений сеанса связи временных отрезков, на которых раздельно для каждого параметра выполняется фильтрация, свертка данных и отсев грубых сбоев измерений. Полученные в результате сеанса связи значения параметров (4) обрабатывают (5) по методу наименьших квадратов. После окончания итерационного процесса решения нелинейной системы проверяют состоятельность исходной статистической гипотезы по критерию "хи-квадрат", исключают, как аномальное, одно значение траекторного параметра (4), которое имеет максимальное значение взвешенной остаточной невязки, или корректируют точность измерений этого траекторного параметра, если это аномальное значение выявлено в циклах повторно для одного и того же параметра. Циклы итерационных процессов повторяют до положительного завершения проверки исходной статистической гипотезы и получают оптимальную оценку орбитальных параметров движения КА в зоне измерений выполненного сеанса связи. При этом оперативно получают оценки реальных точностных характеристик измерительного канала РЛС в конкретном сеансе связи, в соответствии с которыми определяют ковариационные матрицы оценок орбитальных параметров. Из числа шести полученных значений параметров орбиты в результате обработки (5) выделяют и запоминают на магнитных накопителях вычислительного устройства значения (6) только двух параметров - наклонения и долготы восходящего узла средней прецессирующей плоскости орбиты. Полученные в текущем сеансе связи значения наклонения и долготы восходящего узла (6) и накопленные на предшествующем интервале полета КА до нескольких десятков суток их же значения фильтруют (7) по критерию метода наименьших квадратов. Фильтрацию выполняют в цикле. В каждом цикле с применением критерия "хи-квадрат" исключают аномальные значения параметров (6) в отдельных сеансах связи. В результате получают уточненные значения (8) наклонения и долготы восходящего узла средней прецессирующей орбиты в текущем сеансе связи.
Полученные значения (8) используют при последующей обработке (9) траекторных параметров (4). Обработка (9) аналогична обработке (5), только здесь определяют оптимальные оценки (10) радиуса, вектора и наклона скорости, аргумента широты КА в средней прецессирующей орбите (8), которые запоминают на магнитных накопителях. Полученные в текущем сеансе связи оценки (10) совместно с такими же оценками, накопленными на предшествующем интервале полета КА до нескольких суток, фильтруют (11) по критерию метода наименьших квадратов. Фильтрацию выполняют в цикле. В каждом цикле с применением критерия "хи-квадрат" исключают аномальные оценки (10) отдельных сеансов связи или перенастраивают фильтр с учетом апостериорных данных. В результате получают (12) уточненные значения радиуса, вектора и наклона скорости, аргумента широты КА в текущем сеансе связи и оценку торможения КА в атмосфере на обрабатываемом участке его полета, которую учитывают в числе апостериорных данных для уточнения шума системы при перенастройке фильтра. Полученные значения параметров (8) и (12) совместно используют в качестве начальных условий (13) для прогнозирования (14) параметров средней орбиты, причем для определения оценок истинных координат КА на задаваемый момент дополнительно определяют и учитывают периодические возмущения средней орбиты в гравитационном поле Земли в задаваемый момент. Полученные в результате обработки (9) остаточные невязки (15) метода наименьших квадратов принимают за оценки ошибок траекторных измерений и запоминают на магнитных носителях. Накопленные оценки ошибок периодически обрабатывают (16) совместно, выделяют систематические составляющие ошибок (17) траекторных измерений. Систематические составляющие (17) учитывают в последующих сеансах связи при обработках (5) и (9).
С применением стендовых версий обработок (5), (7), (9) и (11) были выполнены модельные исследования, учитывающие инструментальные ошибки траекторных измерений и методические ошибки модели движения КА. Для исследований использовались реальные данные документирования сеансов связи с КА серии "Космос".
Были получены результаты модельных оценок априорной точности определения параметров средней орбиты. Выполнялась проверка достоверности априорных модельных оценок точности путем апостериорного сравнения оценок параметров, получаемых на основе двух независимых групп исходных данных.
Исследования подтвердили эффективность предлагаемых в рассматриваемом способе мер сохранения данных, получаемых на скользящем интервале полета КА в течение нескольких десятков суток для точного определения параметров ориентации плоскости орбиты и в течение нескольких суток для определения параметров движения в плоскости орбиты. Подтверждена возможность сокращения числа сеансов связи с КА в суточных циклах, при этом высокие характеристики точности достигались при выполнении одного единственного сеанса связи в суточном цикле, что может являться уникальным результатом в известной практике определения и прогнозирования низких орбит КА.
В качестве модели движения КА при исследованиях применялись алгоритм и программа аналитического прогнозирования. При аналитическом прогнозировании каждый из шести параметров орбиты представлен двумя компонентами: средними их значениями и геофизическими периодическими возмущениями. Средние значения близки по сути к кеплеровским, но в них учитывают вековые возмущения орбиты от нецентрального геопотенциала и из-за торможения КА в атмосфере. Геофизические периодические возмущения параметров представлены комбинациями гармоник возмущений с частотами, кратными по отношению к периоду обращения КА на средней орбите и к периоду относительного вращения плоскости орбиты и Земли. Возмущения рассчитываются как функции значений аргумента широты и долготы восходящего узла средней прецессирующей орбиты.
Программы стендовой реализации обработок (5), (7), (9) и (11), предусматривающие оперативные режимы работы, составляют объемы соответственно для программы (5) и (9) - 60320 байт, для программы (7) - 56394 байт и для программы (11) - 61872 байт. Общий объем программы автоматического режима обработок (5), (7), (9), (11) на НКУ по предварительным оценкам не превысит 60 Кбайт.
Время одного цикла обработки метода наименьших квадратов при исследованиях составляло: 6 секунд для обработок (5) и (9), < 1 секунды для обработки (7) данных по 128 сеансам связи и для обработки (11) данных 12 сеансов связи. Расчеты выполнялись на ПЭВМ РС АТ 286 с сопроцессором 287.
Источники информации
1. Ю.С. Саврасов. Методы определения орбит космических объектов. М., Машиностроение, 1981, с. 27, 28, 83-87.
2. Основы теории полета космических аппаратов. Под ред. Г.С. Нариманова и М.К. Тихонравова. М., Машиностроение, 1972, с. 296-318.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ГЕОСТАЦИОНАРНОГО СПУТНИКА | 2005 |
|
RU2313104C2 |
| СПОСОБ ОТОБРАЖЕНИЯ БАЛЛИСТИЧЕСКОГО СОСТОЯНИЯ ОРБИТАЛЬНОЙ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2461016C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО ОБЪЕКТА | 2013 |
|
RU2531433C1 |
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ И НАБЛЮДЕНИЯ В ЗАДАННОМ ДИАПАЗОНЕ ШИРОТ | 2018 |
|
RU2689792C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО СПУСКЕ С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2561490C1 |
| СПОСОБ ПЕРЕФАЗИРОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОКОЛОЗЕМНОЙ ОРБИТЕ | 2023 |
|
RU2806928C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ И НАБЛЮДЕНИЯ ПРИЭКВАТОРИАЛЬНЫХ ШИРОТ | 2017 |
|
RU2653063C1 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2013 |
|
RU2535353C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
Изобретение относится к космонавтике и может использоваться для обработки траекторных измерений с целью точного определения параметров околокруговой орбиты космического аппарата. Согласно изобретению применяют четыре этапа обработки траекторных данных. После первого из них запоминают данные по ориентации плоскости орбиты и фильтруют их вместе с аналогичными данными, накопленными на интервале в несколько десятков суток. Определяют точные параметры плоскости орбиты, применяя их на следующем этапе, где получают оценки четырех параметров движения в плоскости орбиты. Последние запоминают и фильтруют вместе с аналогичными данными, накопленными на интервале в несколько суток. По ним определяют точные значения параметров движения в плоскости орбиты. При обработке данных на всех этапах используют критерий согласия χ2 ("хи-квадрат"). Изобретение обеспечивает сохранение с учетом старения объемов данных, которые позволяют надежно определять параметры орбиты при пониженном числе сеансов связи. 1 ил.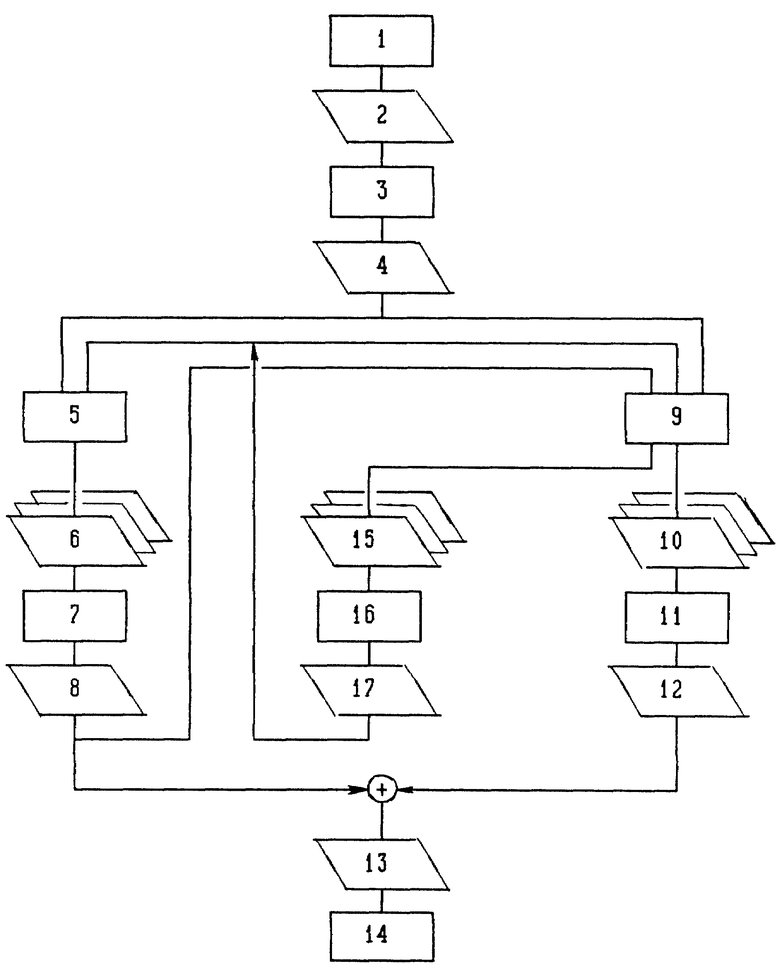
Способ определения параметров орбиты космического аппарата (КА), заключающийся в выполнении измерений траекторных параметров, передаче на комплекс управления совокупности измеренных значений траекторных параметров с последующим их накапливанием и обработкой, отличающийся тем, что накопленные в сеансе связи значения траекторных параметров обрабатывают по методу наименьших квадратов, причем после окончания итерационного процесса решения нелинейной системы проверяют состоятельность исходной статистической гипотезы по критерию согласия χ2 ("хи-квадрат"), исключают отдельные аномальные значения, корректируют точность измерений обрабатываемых траекторных параметров, после чего циклически повторяют обработку до ее завершения и получения оптимальной оценки орбитальных параметров движения КА в зоне измерений выполненного сеанса связи, при этом обработку траекторных параметров выполняют дважды, причем после первой обработки выделяют и запоминают на магнитных накопителях вычислительного устройства значения наклонения и долготы восходящего узла средней прецессирующей плоскости орбиты, полученные в текущем сеансе связи значения наклонения и долготы восходящего узла и накопленные на предшествующем интервале полета КА до нескольких десятков суток их значения фильтруют по критерию метода наименьших квадратов, в цикле с применением критерия "хи-квадрат" исключают аномальные их значения в отдельных сеансах связи и получают уточненные значения накопления и долготы восходящего узла средней прецессирующей орбиты в текущем сеансе связи, при последующей обработке траекторных параметров полученные уточненные значения берут в качестве известных значений и определяют оптимальные оценки радиуса, вектора и наклона скорости, аргумента широты КА в средней прецессирующей орбите, их запоминают на магнитных носителях, полученные в текущем сеансе связи оценки радиуса, вектора и наклона скорости, долготы восходящего узла совместно с такими же оценками, накопленными на предшествующем интервале полета КА до нескольких суток, фильтруют по критерию метода наименьших квадратов, в цикле с применением критерия "хи-квадрат" исключают аномальные оценки отдельных сеансов связи, перенастраивают фильтр с учетом апостериорных данных, получают уточненные значения радиуса, вектора и наклона скорости и аргумента широты КА в текущем сеансе связи и оценку торможения КА в атмосфере на обрабатываемом участке его полета, уточненные значения радиуса, вектора и наклона скорости, аргумента широты КА в текущем сеансе связи и оценку торможения КА в атмосфере совместно с утонченными значениями наклонения и долготы восходящего узла используют в качестве начальных условий для прогнозирования параметров средней орбиты, причем для определения истинных координат КА на заданный момент дополнительно определяют и учитывают периодические возмущения средней орбиты в гравитационном поле Земли в задаваемый момент, а полученные в результате второй обработки траекторных параметров остаточные невязки метода наименьших квадратов принимают за оценки ошибок траекторных измерений и запоминают на магнитных накопителях, накопленные оценки ошибок периодически обрабатывают совместно и выделяют систематические составляющие ошибок траекторных измерений, которые учитывают в последующих сеансах связи при первой и второй обработках траекторных параметров.
| Основы теории полета космических аппаратов/Под ред | |||
| Г.С | |||
| Нариманова, М.К | |||
| Тихонравова | |||
| - М.: Машиностроение, 1972, с.296-318 | |||
| Основы теории полета и элементы проектирования искусственных спутников земли/Под ред | |||
| М.К | |||
| Тихонравова | |||
| - М.: Машиностроение, 1974, с.212-243 | |||
| Саврасов Ю.С | |||
| Методы определения орбит космических объектов | |||
| - М.: Машиностроение, 1981, с.27, 28, 83-87 | |||
| Корн Г.К., Корн Т.К | |||
| Справочник по математике | |||
| - М.: Наука, 1974, разд | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
