Изобретение относится к радиолокации и может быть использован для выполнения посадки воздушными судами различных классов в экстремальных условиях.
Несмотря на значительные усилия в части внедрения новых технологических решений как собственно в авиационную технику, так и в системы управления воздушным движением, уровень авиапроисшествий во всем мире продолжает ежегодно возрастать. При этом значительная часть (до 40%) всех авиапроисшествий приходится на самую опасную и напряженную фазу полета - снижение и посадку. Особая роль при выполнении этой фазы полета отводится радиовысотомерам.
Известны радиовысотомеры (авт.свид. СССР №№1300531, 1663590; патенты РФ №№2111505, 2124760, 2126979, 2131622, 2150752; патенты США №№3714654, 48925213, 4495580, 5132693; патент Германии №1917140; патент Франции №2037222. Бычков С.И. и др. Космические радиотехнические комплексы. Под ред. С.И. Бычкова. - М.: Сов. радио, 1967, рис.2.4.1 и др.).
Из известных радиовысотомеров наиболее близким к предлагаемому является «Частотный радиовысотомер» (Бычков С.И. и др. Космические радиотехнические комплексы. Под ред. С.И.Бычкова. - М.: Сов. радио, 1967, С.141, рис.2.4.1), который и выбран в качестве прототипа.
Указанный радиовысотомер использует частотно-модулированные сигналы, частота которых изменяется по синусоидальному, пилообразному, треугольному и другим законам частотной модуляции. Наибольшее распространение получила синусоидальная модуляция, так как она осуществляется наиболее просто. Треугольная модуляция имеет преимущество в отношении линейности шкал прибора, но модулятор получается в этом случае значительно более сложным.
Известный частотный радиовысотомер относится к устройствам высокой точности. Однако для решения ряда задач эта точность оказывается недостаточной. К числу таких задач относится слепая посадка летательных аппаратов (самолетов, вертолетов и т.п.). Кроме того, известный радиовысотомер на малых высотах обладает малой чувствительностью.
Технической задачей изобретения является повышение точности и чувствительности частотного радиовысотомера при измерении малых высот.
Поставленная задача решается тем, что частотный радиовысотомер, содержащий, в соответствии с ближайшим аналогом, последовательно включенные модулятор, частотно-модулированный генератор и передающую антенну, приемную антенну и последовательно включенные ограничитель, счетный каскад, усилитель постоянного тока и индикатор высоты, отличается от ближайшего аналога тем, что он снабжен генератором шумового сигнала, RC-фильтром, смесителем и усилителем разностной частоты, причем выход генератора шумового сигнала через RC-фильтр подключен к входу модулятора, к выходу приемной антенны последовательно подключены смеситель, второй вход которого соединен с вторым выходом частотно-модулированного генератора, и усилитель разностной частоты, выход которого соединен с входом ограничителя.
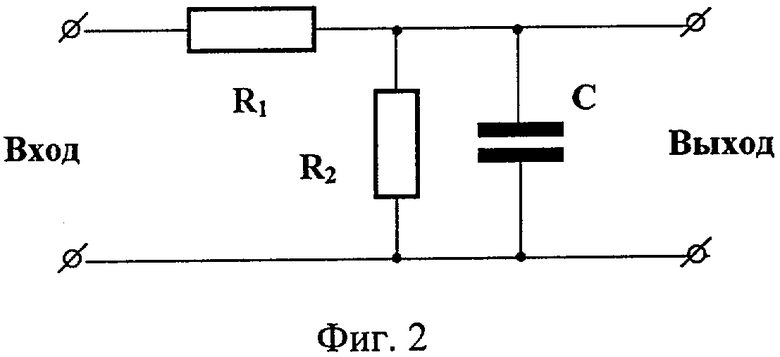
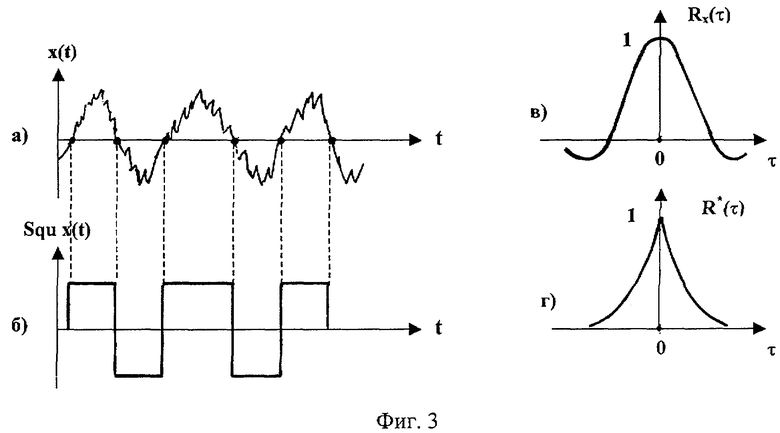
Структурная схема предлагаемого частотного радиовысотомера представлена на фиг.1. Принципиальная схема RC-фильтра для формирования спектра шумов с экспоненциально запускающей автокорреляционной функцией изображена на фиг.2. Вид автокорреляционной функции шумового сигнала x(t) и клиппированного сигнала Squ x(t) показан на фиг.3.
Частотный радиовысотомер содержит последовательно включенные генератор 1 шумового сигнала, RC-фильтр 2, модулятор 3, частотно-модулированный генератор 4 и передающую антенну 5, последовательно включенные приемную антенну 6, смеситель 7, второй вход которого соединен со вторым выходом частотно-модулированного генератора 4, усилитель 8 разностной частоты, ограничитель 9, счетный каскад 10, усилитель 11 постоянного тока и индикатор 12 высоты.
Частотный радиовысотомер работает следующим образом.
Шумовой сигнал x(t) (фиг.3,а), генерируемый при помощи генератора 1 шума, проходит через частотный фильтр 2, соответствующим образом формирующий спектр шумового сигнала для получения нужной формы автокорреляционной функции, и поступает на вход модулятора 3. Форма автокорреляционной функции при переходе к использованию корреляции нулевых импульсов показана на фиг.3. При этом клиппированный сигнал Squ x(t) полностью определяется моментами смены знака (нулями), поэтому он может быть заменен эквивалентной последовательностью соответствующих этим нулям коротких импульсов, имеющих фиксированную длительность и амплитуду. Такая форма автокорреляционной функции является обычной (классической) формой автокорреляционной функции шумового сигнала (фиг.3,в)
 ,
,
где τ - время задержки;
Т - время усреднения (интегрирования).
При увеличении высоты полета воздушного судна увеличивается транспортное запаздывание отраженного от земной поверхности сигнала и соответственно уменьшается значение автокорреляционной функции излучаемого и отраженного сигналов.
Такая форма автокорреляционной функции шумового сигнала не обеспечивает высокой точности и чувствительности радиовысотомера при измерении малых высот.
Для обеспечения нужной формы автокорреляционной функции необходимо сформировать соответствующим образом спектр шумового сигнала x(t) генератора 1.
Исследования шумов с различным спектром показали, что при пропускании белого шума через RC-фильтр (фиг.2) на выходе последнего образуется сигнал с автокорреляционной функцией следующего вида:
где  - постоянная времени фильтра.
- постоянная времени фильтра.
Такая форма автокорреляционной функции наиболее удобна для использования в предлагаемом радиовысотомере.
Постоянная времени определяется заданным диапазоном измерения высоты (запаздыванием отраженного сигнала τ). Для того чтобы уровень выходного сигнала на высоте 30 м составлял
должно выполняться равенство λ=τ, т.е.
Особенностью предлагаемого радиовысотомера является то, что в нем используется не обычная автокорреляционная функция шумового сигнала
 ,
,
а так называемая антикорреляционная функция, равная среднему квадрату разности зондирующего и отраженного сигналов
 ,
,
где Rx(0) - дисперсия сигнала x(t);
ρх(τ) - нормированная автокорреляционная функция сигнала x(t).
Сигнал, прошедший RC-фильтр 2, поступает на вход модулятора 3, а затем на вход генератора 4, где модулирует несущую частоту последнего. Излучаемый антенной 5 высокочастотный сигнал, частота которого ωс, промодулированный шумом с частотой ω(t),
ωс+ω(t),
после отражения от поверхности земли, воспринимается приемной антенной 6 и поступает на первый вход смесителя 7
ωс+ω(t+τ).
На второй вход смесителя 7 подается зондирующий сигнал с частотой ωс+ω(t) с второго выхода частотно-модулированного генератора 4. На выходе смесителя 7 образуются напряжения комбинационных частот. Усилителем 8 выделяется напряжение разностной частоты
ω(t)+ω(t-τ).
Этот сигнал подвергается усилению и ограничению по максимуму и по минимуму в ограничителе 9 и поступает в счетный каскад 10, обеспечивающий выходное напряжение, пропорциональное средней частоте пересечений разностным напряжением нулевого уровня. Выходное напряжение счетного каскада пропорционально средней частоте пересечений разностным напряжением нулевого уровня. Усредненное таким образом разностное напряжение после усиления в усилителе 11 постоянного тока подается на индикатор 12 высоты.
Таким образом, предлагаемый частотный радиовысотомер по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение точности и чувствительности при измерении малых высот. Это достигается использованием антикорреляционной функции.
При работе с обычной автокорреляционной функцией показание выходного индикатора 12 возросли бы с изменением высоты, тогда как при использовании антикорреляционной функции они пропорциональны измеряемой высоте, т.е. при малой высоте они равны нулю и возрастают с ее увеличением.
Другим положительным свойством антикорреляционной функции является то, что чувствительность измерения максимальна на малых высотах, что особенно важно при слепой посадке самолета.
Антикорреляционная функция шумового сигнала, сформированного рассмотренным выше RC-фильтром 2, описывается выражением
 .
.
Если в предлагаемом радиовысотомере при высоте, равной 30 м, уровень выходного сигнала должен быть равен
т.е. τ=λ, то величина λ в этом случае должна быть равна λ=2·10-7 с.
При малых значениях τ/λ (малые высоты) Н(τ) почти линейно зависит от высоты.
Чувствительность радиовысотомера при такой форме антикорреляционной функции очень высока для τ=0, так как
Это значит, что радиовысотомер, использующий антикорреляционную функцию такой формы, обладает наибольшей чувствительностью на малых высотах.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2006 |
|
RU2309424C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2515191C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2313108C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| КОГЕРЕНТНАЯ РАДИОЛИНИЯ | 2007 |
|
RU2329608C1 |
| АВАРИЙНО-СИГНАЛЬНАЯ СИСТЕМА | 2007 |
|
RU2355603C1 |
Предлагаемый частотный радиовысотомер относится к радиолокации и может быть использован для выполнения посадки воздушными судами различных классов в экстремальных условиях. Достигаемым техническим результатом изобретения является повышение точности и чувствительности частотного радиовысотомера при измерении малых высот. Частотный радиовысотомер содержит генератор шумового сигнала, RC-фильтр, модулятор, частотно-модулированный генератор, передающую антенну, приемную антенну, смеситель, усилитель разностной частоты, ограничитель, счетный каскад, обеспечивающий выходное напряжение, пропорциональное средней частоте пересечений разностным напряжением нулевого уровня, усилитель постоянного тока и индикатор высоты, соединенные определенным образом. 3 ил.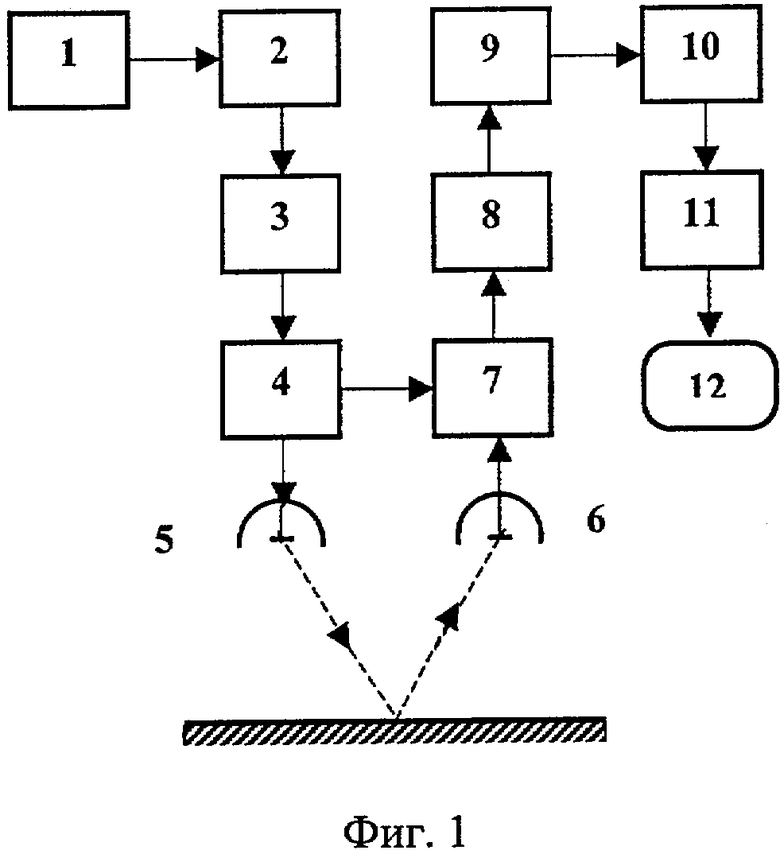
Частотный радиовысотомер, содержащий последовательно включенные модулятор, частотно-модулированный генератор и передающую антенну, приемную антенну и последовательно включенные ограничитель, счетный каскад, обеспечивающий выходное напряжение, пропорциональное средней частоте пересечений разностным напряжением нулевого уровня, усилитель постоянного тока и индикатор высоты, отличающийся тем, что он снабжен генератором шумового сигнала, RC-фильтром, смесителем и усилителем разностной частоты, причем выход генератора шумового сигнала через RC-фильтр подключен к входу модулятора, к выходу приемной антенны последовательно подключены смеситель, второй вход которого соединен со вторым выходом частотно-модулированного генератора, и усилитель разностной частоты, выход которого соединен с входом ограничителя.
| БЫЧКОВ С.И | |||
| и др | |||
| Космические радиотехнические комплексы | |||
| - М.: Сов | |||
| Радио, 1967, с.141, рис.2.4.1 | |||
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2030762C1 |
| DE 50011232 D, 09.02.2006 | |||
| Регулятор расхода | 1982 |
|
SU1043601A2 |
| US 6104336 А, 15.08.2000. | |||

