Заявляется приоритет согласно корейской заявке №2005-15775, поданной 25 февраля 2005 г. в Корейское бюро по охране интеллектуальной собственности, и ее содержание полностью включено в настоящее описание путем ссылки. Настоящая заявка связана также с заявкой на патент США, поданной с приоритетом согласно корейской заявке №2005-15468 (116511-00180), поданной 24 февраля 2005 г., и заявкой на патент США №10/804077, поданной 19 марта 2004 г., и их содержание также полностью включено в настоящее описание путем ссылки.
Область техники
Настоящее изобретение относится к роботу-уборщику и к способу управления таким роботом. Более конкретно настоящее изобретение относится к роботу-уборщику, его траектории уборки, которая предпочтительно является прямоугольной спиралью и зависит от формы убираемой поверхности, а также к способу управления таким роботом.
Уровень техники
В последнее время образовался и растет рынок для роботов для домашнего использования, включая различные типы роботов-уборщиков. Важно, чтобы робот-уборщик удовлетворительно убирал всю площадь, не оставляя никаких неубранных участков. Поэтому необходимо, чтобы робот-уборщик распознавал неубранные области и убирал их.
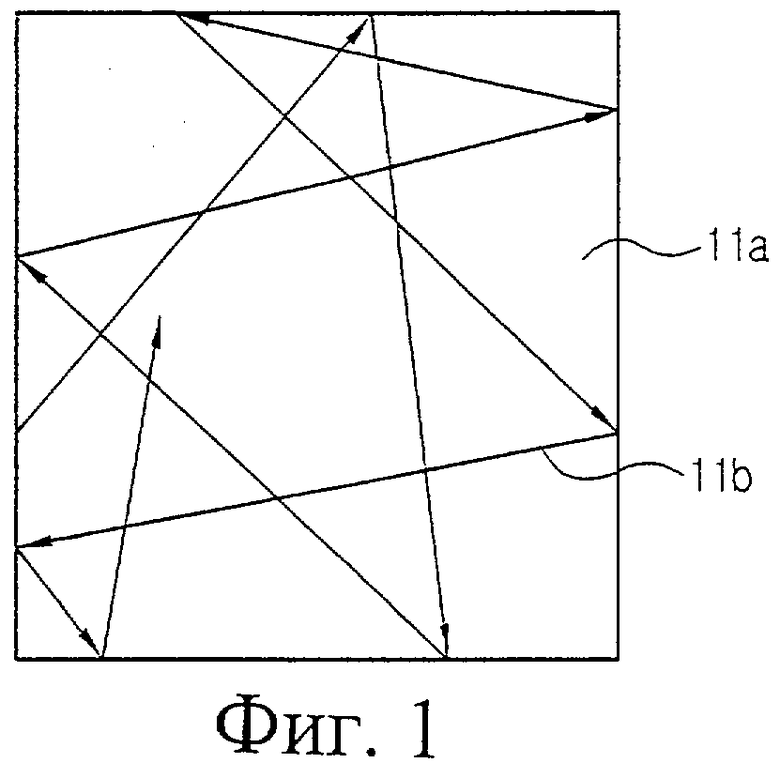
Типичные способы уборки обычным роботом-уборщиком включают способ уборки по случайной траектории и способ уборки по шаблону. На фиг.1 показан пример обычного способа уборки по случайной траектории. Позицией 11а обозначена убираемая область, а позицией 11b - случайная траектория уборки. Способ уборки по случайной траектории означает, что уборщик маневрирует по области уборки, не придерживаясь каких-либо правил. Другими словами, он движется аналогично катящемуся шару, который упруго отскакивает после соударения со стенками по V-образной траектории. При использовании способа уборки по случайной траектории ряд участков может остаться неубранным.
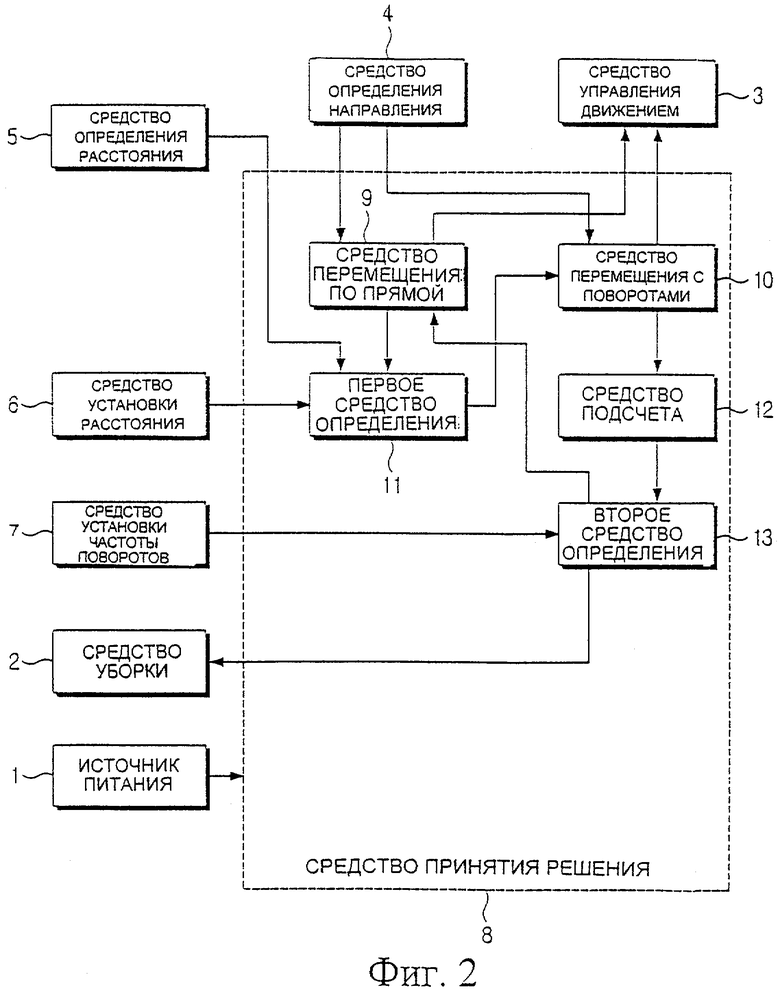
На фиг.2 показан пример известного способа уборки, раскрытого в заявке на патент Японии №H5-161577, выложенной 29.06.1993. На фиг.3 показана траектория перемещения при уборке для устройства, изображенного на фиг.2.
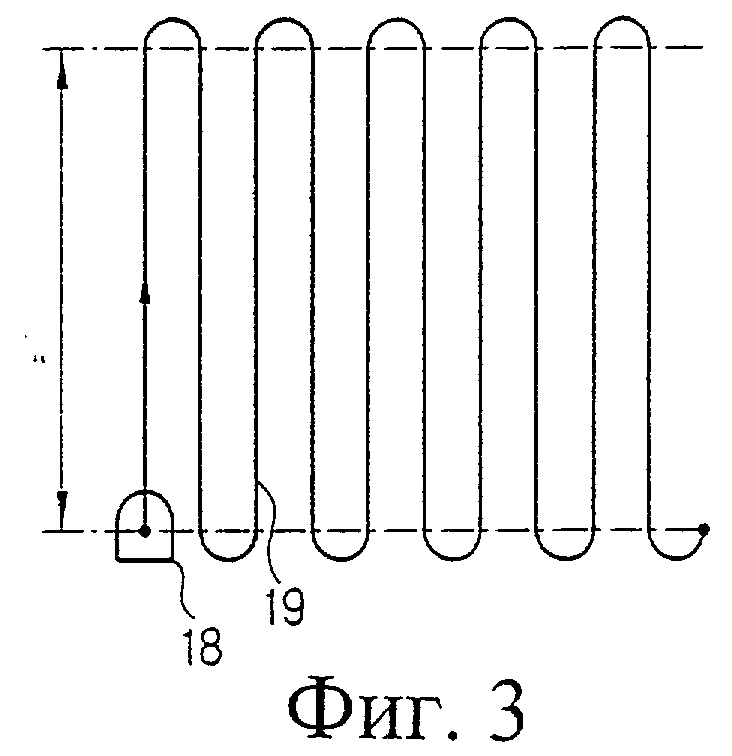
Обратимся к фиг.2 и 3. Робот-уборщик содержит средство 3 управления движением для перемещения основного корпуса; средство 5 определения пройденного расстояния; средство 4 определения направления, в котором ориентирован основной корпус; средство 8 принятия решения, в которое поступают сигналы из средства 5 определения пройденного расстояния и средства 4 определения направления и которое выдает сигнал перемещения в средство 3 управления движением; средство 2 уборки; источник 1 питания; средство 6 для установки расстояния перемещения; и средство 7 для установки числа поворотов. Робот-уборщик едет по прямой линии, совершает U-образные повороты с помощью средства 4 обнаружения направления и средства 3 управления движением и решает, достигает ли число поворотов и расстояние перемещения по прямой линии заданного значения для проведения уборки. На фиг.3 позицией 18 обозначен корпус робота-уборщика, а позицией 19 - траектория движения. Как показано на фиг.3, робот-уборщик движется просто по параллельным полосам, что часто недостаточно для эффективного охвата всей области уборки.
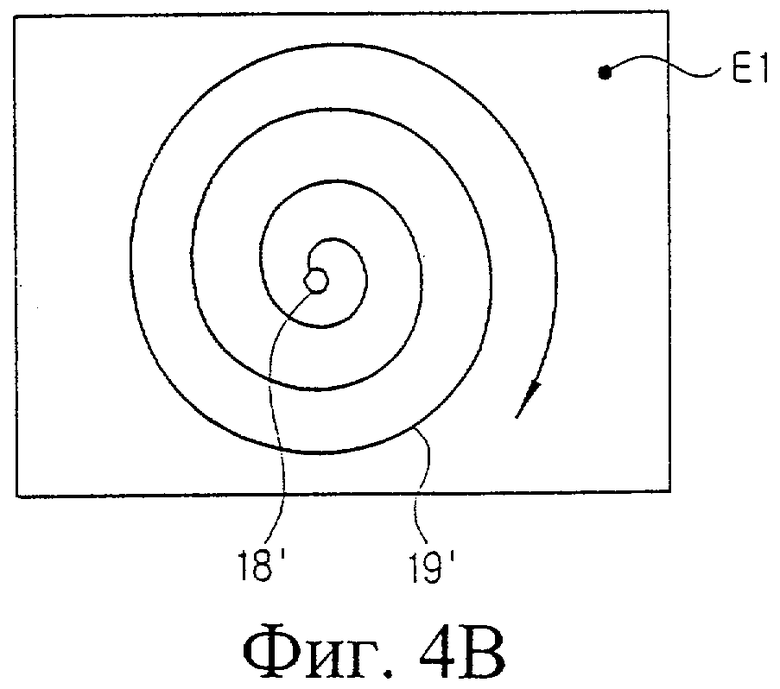
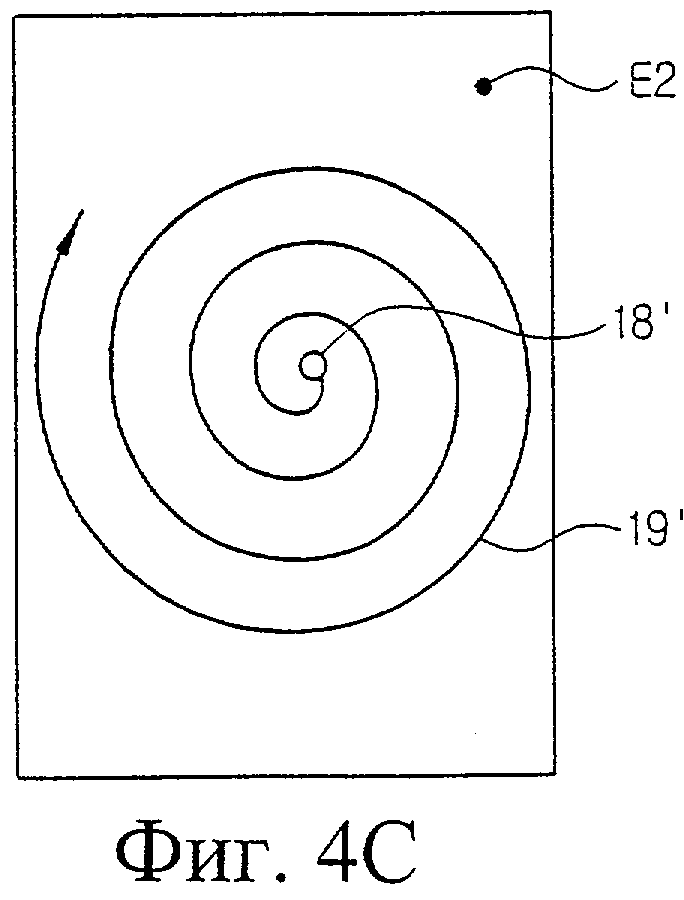
На фиг.4А-4С показаны обычные траектории уборки в виде концентрических спиралей. На фиг.4А-4С позицией 18' обозначен корпус робота-уборщика, позицией 19' - траектория уборки в форме концентрической спирали, а позициями Е1 и Е2 обозначены неубранные области. Траектория 19' уборки образует концентрические окружности, поэтому может охватить только области, имеющие диаметр, равный диаметру этих окружностей. Соответственно остаются неубранными области Е1 и Е2, особенно когда область уборки является прямоугольной, как показано на фиг.4В и 4С.
Сущность изобретения
Соответственно первой целью настоящего изобретения является создание робота-уборщика, который имеет спирально-прямоугольную траекторию уборки и использует переменную траекторию уборки, что позволяет охватить всю убираемую область.
Второй целью настоящего изобретения является создание способа управления вышеуказанным роботом-уборщиком, который имеет спирально-прямоугольную траекторию уборки.
Для достижения первой цели предлагается робот-уборщик, содержащий: движущий блок, перемещающий робота-уборщика по убираемой поверхности; блок обнаружения области уборки, обнаруживающий область убираемой поверхности; и центральный процессор, вычисляющий спиральную траекторию уборки, соответствующую форме каждой области уборки на основе информации об области уборки, обнаруженной блоком обнаружения области уборки, и выдающий в движущий блок сигнал перемещения для выполнения уборки. Траектория уборки может включать прямоугольную спираль, которая может быть вытянутой или квадратной.
Центральный процессор может содержать блок определения, получающий сигнал обнаружения из блока обнаружения области уборки для определения области уборки, и блок формирования сигнала перемещения, вычисляющий траекторию уборки, соответствующую области уборки, определенной блоком определения, и выдающий в движущий блок сигнал перемещения, соответствующий траектории уборки. Обнаружение области уборки может быть выполнено в процессе или при начале уборки.
Для достижения второй цели настоящее изобретение предлагает способ управления роботом-уборщиком, включающий обнаружение области уборки, вычисление спиральной траектории уборки, соответствующей обнаруженной области уборки, и подачу вычисленного сигнала траектории уборки для выполнения уборки. Кроме того, предлагаемый способ может включать этап выполнения начальной уборки до обнаружения области уборки. Траектория уборки может быть прямоугольной спиралью, которая может быть вытянутой или квадратной.
Робот-уборщик, выполненный согласно изобретению, формирует траекторию уборки, которая предпочтительно представляет собой прямоугольную спираль, изменяемую в соответствии с областью уборки, что повышает эффективность уборки.
Краткое описание чертежей
Вышеуказанные и другие аспекты, особенности и преимущества настоящего изобретения станут более очевидными из последующего подробного описания со ссылками на чертежи, где:
на фиг.1 показана типичная траектория при способе уборки по случайной траектории;
на фиг.2 показана блок-схема устройства для реализации обычного способа уборки:
на фиг.3 схематично показана траектория уборки при использовании устройства, показанного на фиг.2;
на фиг.4А-4С показаны типичные траектории уборки в виде концентрических спиралей;
на фиг.5 схематично показан робот-уборщик согласно одному из вариантов выполнения изобретения;
на фиг.6 показана блок-схема робота-уборщика, изображенного на фиг.5;
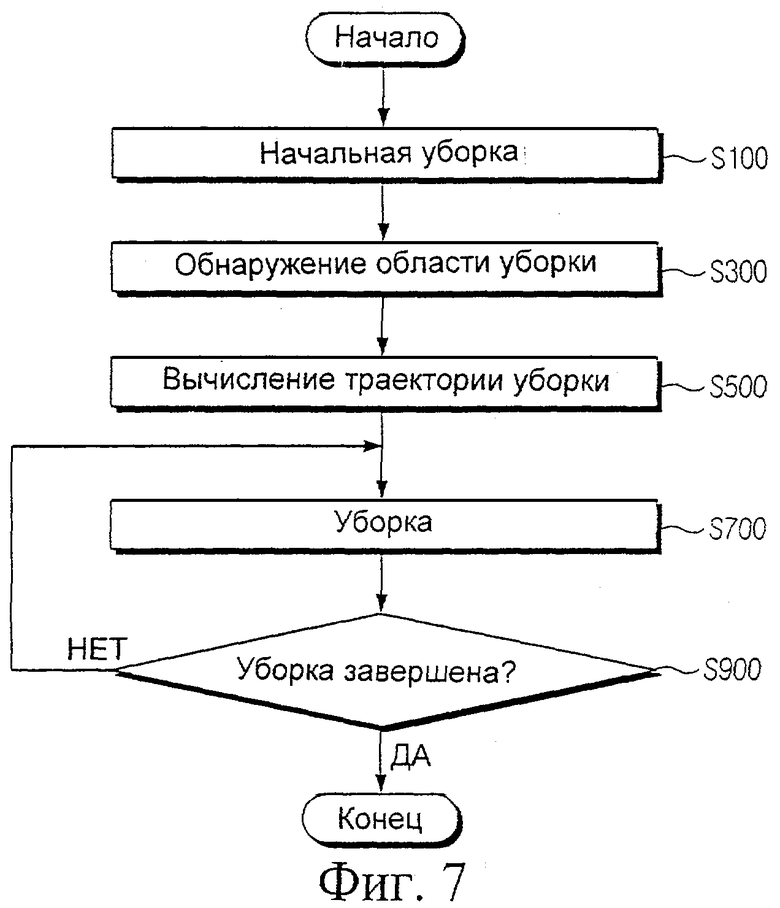
на фиг.7 показана последовательность операций по уборке для робота-уборщика, изображенного на фиг.5;
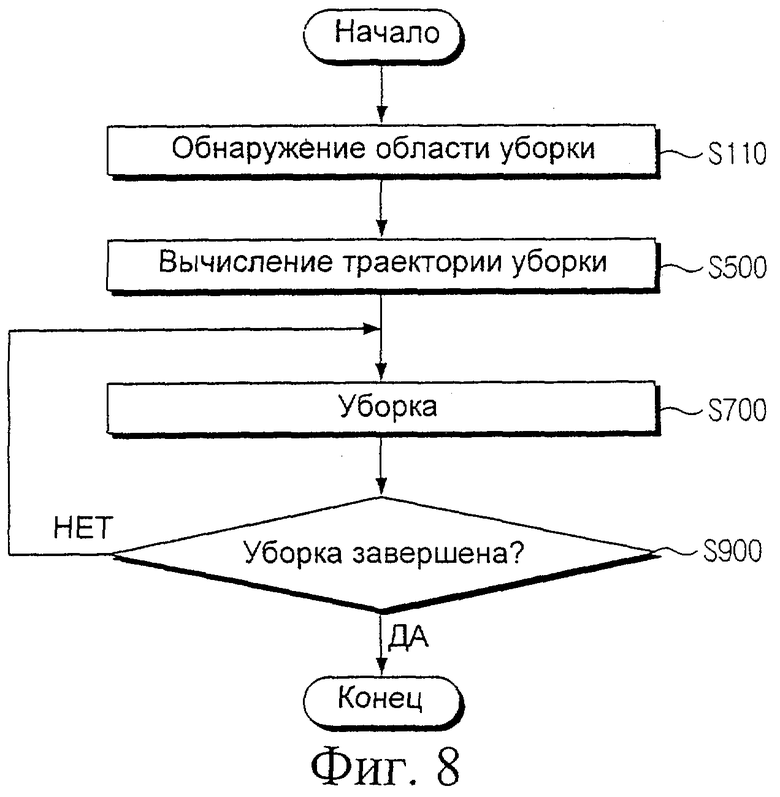
на фиг.8 показана последовательность операций способа управления роботом-уборщиком согласно другому варианту выполнения изобретения;
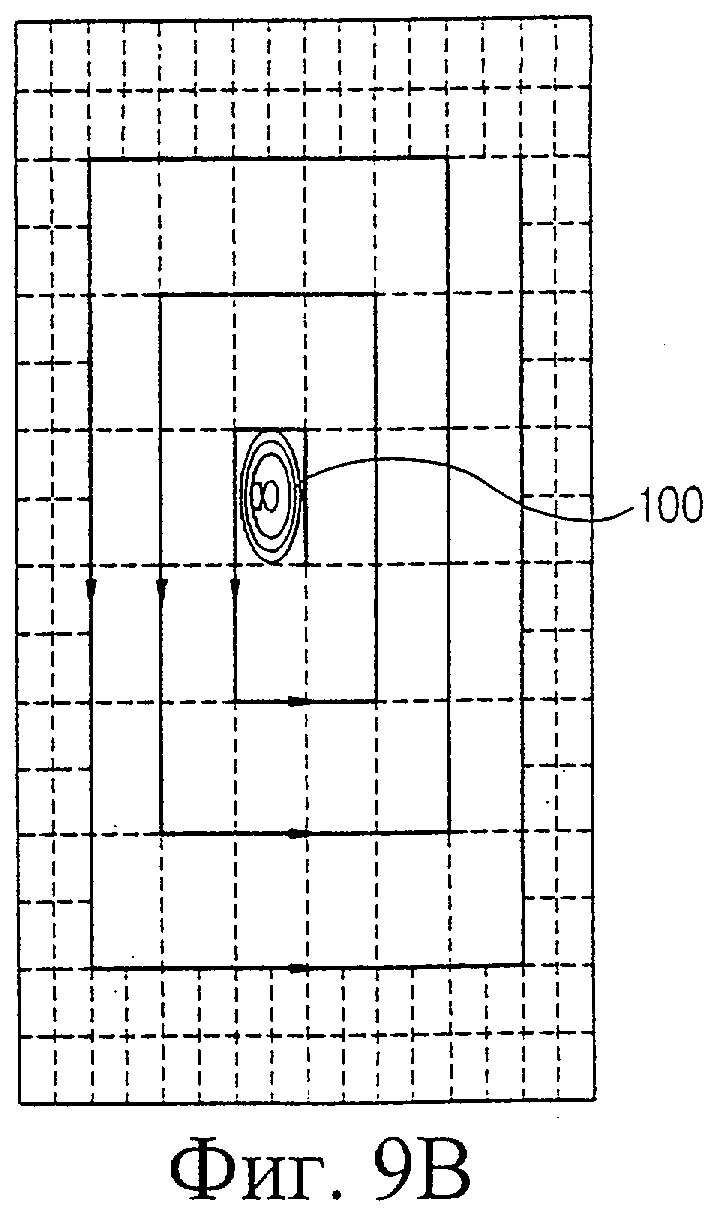
на фиг.9А-9С схематично представлены примеры областей уборки при использовании траекторий уборки согласно варианту выполнения настоящего изобретения.
Подробное описание вариантов выполнения изобретения
Ниже со ссылками на сопровождающие чертежи будут подробно описаны некоторые варианты выполнения настоящего изобретения.
В последующем описании одинаковые элементы обозначены одинаковыми позициями. Признаки, конкретизированные в описании, например подробные описания конструкций и элементов, даны только для лучшего понимания изобретения. Таким образом, настоящее изобретение может быть выполнено без таких конкретных признаков. Кроме того, известные функции или конструкции не описываются подробно, чтобы не загромождать описание ненужными подробностями.
Как показано на фиг.5, робот-уборщик 100 содержит корпус 101, блок 110 уборки, блок 310 обнаружения области уборки, движущий блок 150, блок 170 определения расстояния, центральный процессор 330, аккумулятор 210 и блок 230 манипуляций.
Корпус 101 робота-уборщика может быть выполнен в виде цилиндра и содержит блок 110 уборки, предназначенный для сбора пыли или грязи с убираемой поверхности. Блок 110 уборки может состоять, например, из всасывающей щетки 115 и всасывающей трубы (не показана), предназначенных для всасывания пыли или грязи с убираемой поверхности, всасывающего двигателя 113 для создания всасывающей силы и пылесборной камеры (не показана) для сбора втянутой пыли и грязи.
Блок 310 обнаружения области уборки установлен на передней стороне корпуса 101 робота-уборщика и предназначен для обнаружения области уборки путем обнаружения препятствий, например стен. Блок 310 обнаружения области уборки содержит датчик 311 обнаружения области уборки. Датчик 311 обнаружения области уборки может быть, например, оптическим датчиком 311а, в котором оптический элемент, испускающий инфракрасные лучи, и приемный оптический элемент, принимающий отраженный свет, расположены парой. Кроме того, датчик 311 обнаружения области уборки может быть ультразвуковым датчиком (не показан), который способен испускать ультразвуковые волны и принимать отраженные ультразвуковые волны. Альтернативно датчик 311 обнаружения области уборки может быть датчиком 311b столкновения, расположенным на периферийной части корпуса 101 и обнаруживающим препятствия. Датчик 311b столкновения приводит в действие чувствительный переключатель на бампере, который воспринимает препятствие, когда бампер сталкивается с препятствием при перемещении робота.
Движущий блок 150 для управления ведущими колесами установлен в корпусе 101 уборщика. Движущий блок 150 содержит двигатель 153L левого колеса и двигатель 153R правого колеса, управляющие вращением левого колеса 151L и правого колеса 151R соответственно. Движущий блок 150 получает сигнал из центрального процессора 330 и меняет направление вращения левого колеса 151L и правого колеса 151R при перемещении робота по траектории уборки. Блок 170 обнаружения расстояния содержит датчик 171L вращения левого колеса и датчик 171R вращения правого колеса, которые считывают угловое положение двигателя 153L правого колеса и двигателя 153R левого колеса.
Центральный процессор 330 контролирует работу робота-уборщика 100 в целом, а аккумулятор 210 снабжает робота-уборщика энергией и заряжается от внешнего устройства. Кроме того, в корпусе 101 установлен блок 230 манипуляций (фиг.6) для ввода команд управления роботом-уборщиком в центральный процессор 330 в соответствии с манипуляциями пользователя.
Как показано на фиг.6, робот-уборщик 100 содержит блок 110 уборки, блок 310 обнаружения области уборки, движущий блок 150, блок 170 определения расстояния, центральный процессор 330, аккумулятор 210, блок 230 манипуляций, память 250 и блок 270 связи.
Блок 110 уборки содержит приводную часть 111 всасывающего двигателя, получающую сигналы уборки из центрального процессора 330 для управления работой всасывающего двигателя 113, и всасывающую щетку 115, приводимую в действие всасывающим двигателем 113.
Блок 310 обнаружения области уборки обнаруживает препятствие, например стену, перед роботом-уборщиком 100, и сообщает о нем в центральный процессор 330. Блок 310 содержит управляющую часть 313 для управления обнаружением области уборки, которая получает сигнал из центрального процессора 330 и управляет работой датчика 311 обнаружения области уборки. Датчик 311 обнаружения области уборки первоначально может перемещаться вдоль стены для определения области уборки или может обнаруживать препятствие, чтобы определить область уборки. Датчик 311 обнаружения области уборки может быть, например, оптическим датчиком видимого света, инфракрасным датчиком или датчиком столкновения.
Движущий блок 150 содержит приводную часть 153L левого колеса и приводную часть 153R правого колеса, которые получают сигналы перемещения из центрального процессора 330 и выдают управляющие сигналы в двигатель 155L левого колеса и двигатель 155R правого колеса для вращения левого колеса 151L и правого колеса 151R.
Блок 170 определения расстояния передает значение расстояния, пройденного роботом-уборщиком 100, в центральный процессор 330 и содержит датчик 171L вращения левого колеса и датчик 171R вращения правого колеса, предназначенные для определения количества оборотов двигателя 155L левого колеса и двигателя 155R правого колеса.
Центральный процессор 330 управляет операциями робота-уборщика 100 по уборке в целом и содержит блок 331 определения, определяющий область уборки с помощью блока 310 обнаружения области уборки, и блок 333 формирования сигнала перемещения, который рассчитывает траекторию уборки для робота-уборщика 100 на основе информации из блока 331 определения и подает в движущий блок 150 сигнал перемещения для выполнения уборки. Форма траектории уборки может быть спиралью, предпочтительно - прямоугольной спиралью, что позволяет более эффективно охватить убираемую область. Центральный процессор 330 дополнительно содержит блок 335 подсчета расстояния, который вычисляет расстояние на основе количества оборотов двигателя 155L левого колеса и двигателя 155R правого колеса, переданных посредством датчика 171L вращения левого колеса и датчика 171R вращения правого колеса.
Блок 230 манипуляций служит для управления всеми операциями робота-уборщика 100 и включает различные ручные переключатели. Память 250 является встроенной или съемной, используется для управления всеми операциями робота-уборщика 100 и включает EPROM (стираемую программируемую постоянную память), EEPROM (электрически стираемую программируемую постоянную память) и RAM (оперативную память с произвольным доступом). Блок 270 связи передает данные роботу-уборщику 100 или передает полученные внешние данные в центральный процессор 330.
Обратимся к фиг.6 и 7. Сначала робот-уборщик 100 на шаге S100 производит первоначальную уборку.
В процессе работы после приема из блока манипуляций 230 сигнала начала уборки центральный процессор 330 выдает управляющий сигнал в блок 110 уборки и одновременно выдает управляющий сигнал в движущий блок 150. Когда из центрального процессора 330 в приводную часть 111 всасывающего двигателя подается управляющий сигнал, приводная часть 111 всасывающего двигателя приводит в действие всасывающий двигатель 113 для управления работой всасывающей щетки 115. Пыль или мусор удаляются с убираемой поверхности с помощью всасывающей щетки 115 и перемещаются в пылесборную камеру. Одновременно, когда управляющий сигнал из центрального процессора 330 подается в приводную часть 153L левого двигателя или приводную часть 153R правого двигателя, запускается двигатель 155L левого колеса или двигатель 155R правого колеса, вращая левое колесо 151L или правое 151R колесо согласно траектории уборки, чтобы произвести уборку.
Как описано выше, во время уборки на шаге S300 центральный процессор 330 выдает сигнал на обнаружение области уборки в управляющую часть 313 и управляет датчиком 311 обнаружения области уборки с целью обнаружения области уборки. Когда сигнал обнаружения поступает в центральный процессор 330 через датчик 311 обнаружения области уборки, блок 331 определения центрального процессора 330 на шаге S500 определяет форму области уборки, а блок 333 формирования сигнала перемещения вычисляет траекторию уборки, соответствующую указанной форме области уборки, и посылает сигнал перемещения в блок 150. Траектория уборки может быть прямоугольной спиралью 901, как показано на фиг.9В, и может быть вытянутой спиралью или квадратной спиралью, как показано на фиг.9А и 9С соответственно.
На шаге S700 движущий блок 150, получив сигнал из блока 333 формирования сигнала перемещения, перемещается по траектории уборки в соответствии с формой области уборки и производит уборку. Если на шаге S700 уборка завершается, то операцию уборки заканчивают на шаге S900. Если уборка не завершается, повторяют шаг S700.
На фиг.8 иллюстрируется способ управления роботом-уборщиком согласно другому варианту осуществления изобретения. На фиг.8 показано, что обнаружение области уборки производят до начала уборки. Другими словами, при уборке область уборки обнаруживают согласно способу, показанному на фиг.7, за исключением того, что область уборки обнаруживают на шаге S110 до начала уборки, выполняемой на шаге S100. Соответственно для обозначения тех же процессов, что и на фиг.7, используются те же позиции, а их подробное описание опущено.
Дополнительные преимущества, цели и особенности вариантов осуществления настоящего изобретения сформулированы в описании и станут очевидными специалистам в данной области техники после прочтения описания и при практической реализации изобретения. Цели и преимущества вариантов осуществления настоящего изобретения могут быть поняты и достигнуты в соответствии с формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ПЫЛЕСОСОМ | 2005 |
|
RU2317766C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833996C2 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833538C2 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |




Робот-уборщик содержит движущий блок, перемещающий его по убираемой поверхности; блок обнаружения области уборки, обнаруживающий область убираемой поверхности; и центральный процессор, вычисляющий спиральную траекторию уборки, соответствующую форме области уборки, на основе информации из блока обнаружения области уборки и подающий в движущий блок сигнал перемещения для выполнения уборки. Обеспечивается охват всей убираемой поверхности роботом-уборщиком. 2 н. и 8 з.п. ф-лы, 9 ил.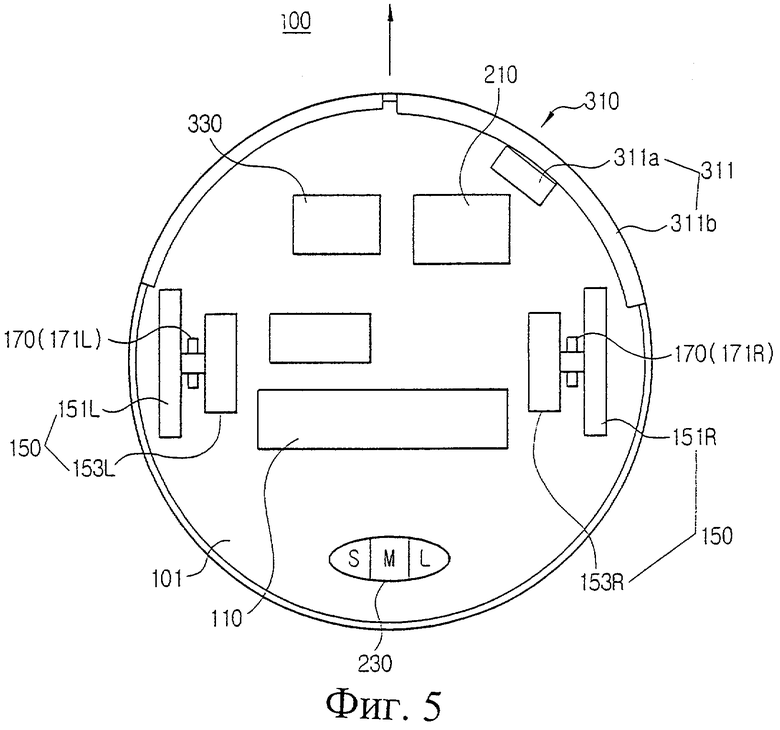
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 20030028993 A1, 13.02.2003 | |||
| СПОСОБ РАБОТЫ РАКЕТНОГО ДВИГАТЕЛЯ И РАКЕТНЫЙ ДВИГАТЕЛЬ РОМАНОВА | 2007 |
|
RU2380563C2 |

