Изобретение относится к области производства, преобразования и распределения электрической энергии, в частности к синхронным генераторам, а именно к получению исходных данных для определения на переходных и установившихся режимах текущих значений параметров синхронного генератора, необходимых для компенсации крутильных колебаний его ротора.
Близким по технической сущности к предлагаемому изобретению является способ экспериментального определения амплитуды и фазы качаний ротора синхронного генератора для ряда значений частоты вынуждающих колебаний напряжения возбуждения по электронным приборам или осциллограммам в рабочем режиме, основанный на том, что в качестве источника тестовых воздействий применяют генератор переменных напряжений, изменяющихся по закону синуса, задают набор фиксированных частот этих синусоидальных колебаний напряжения, настраивают генератор на одну из этих частот, подключают его к контактам возбудителя питания обмотки ротора, возбуждают качания ротора на частоте тестового напряжения и определяют косвенно по осциллограммам на этой частоте амплитуду угла качаний ротора и сдвиг фазы качаний ротора относительно синусоидального тестового напряжения. При этом все величины, входящие в расчетные выражения, определяются экспериментально в одном рабочем режиме (см. И.Д.Урусов, М.М.Камша. Теория и экспериментальные способы определения параметров синхронных машин в рабочих режимах методом малых колебаний. Известия Академии наук СССР. Энергетика и транспорт. №2, 1976, стр.50-53).
Этот способ не решает задачу определения амплитуды угла качаний ротора и сдвиг фаз качаний ротора с требуемой точностью, так как при одной и той же частоте вращения ротора может развиваться разная мощность генератора, что создает различный уровень электромагнитных помех, а это приводит к нарушению идентичности условий проведения измерений и поэтому к снижению точности определения параметров качаний ротора генератора.
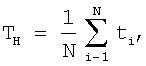
Близким к предлагаемому является способ экспериментального определения амплитуды и фазы качаний ротора синхронного генератора в рабочем режиме по патенту РФ №2233455, G01R 31/34, заключающийся в том, что в качестве источник тестовых воздействий применяют генератор знакопеременных напряжений, изменяющихся по периодическому закону, задают набор фиксированных периодов колебаний, настраивают генератор знакопеременных напряжений на один из этих периодов и подключают его к контактам возбудителя питания обмотки ротора синхронного генератора, возбуждают вынужденные качания ротора, определяют на этом периоде амплитуду основной гармоники угла качаний ротора и сдвиг фазы основной гармоники угла качания ротора относительно фазы основной гармоники знакопеременных напряжений на периоде тестового воздействия, а затем переключают генератор знакопеременных периодических напряжений на следующий фиксированный период тестовых воздействий и повторяют перечисленные выше операции, а амплитуду и сдвиг фазы основной гармоники качаний вращающегося ротора относительно фазы основной гармоники тестовых воздействий определяют хронометрическим способом, для чего устанавливают генератор знакопеременных периодических напряжений, фиксированный период знакопеременных тестовых воздействий, подключают генератор знакопеременных периодических напряжений контактам возбудителя питания обмотки ротора синхронного, измеряют продолжительность интервала времени между двумя ближайшими моментами регистрации, определяют при этом амплитуду δΘm и сдвиг фазы ϕот основной гармоники качаний ротора относительно фазы основной гармоники тестового воздействия на его фиксированном периоде по формулам
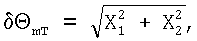


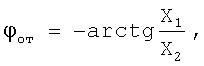
где X1 - проекция вектора угла качаний ротора, параллельная оси, задаваемой на фазовой плоскости начальной фазой основной гармоники тестового воздействия;
Х2 - проекция вектора угла качаний ротора, ортогональная оси, задаваемой на фазовой плоскости начальной фазой основной гармоники тестового воздействия;
N - полное число оборотов ротора на мерном интервале;
ti - продолжительность i-го интервала времени;
i - номер интервала времени;
ТH - номинальный период вращения ротора;
TTj - период тестовых воздействий;
j - номер периода тестового воздействия.
Этот способ не решает с приемлемой точностью задачи определения в ходе эксплуатации синхронного генератора на установившихся и переходных режимах его работы характеристик вынужденных (и тем более самопроизвольно возбуждаемых) в общем случае негармонических крутильных колебаний ротора, необходимых, например, для реализации процедур их компенсации.
В представленном изобретении предлагается способ и реализующее его устройство компенсации самопроизвольно возбуждаемых (необязательно периодических) кратковременных, длительных или постоянно действующих крутильных колебаний ротора синхронного генератора.
Предлагаемый способ компенсации крутильных колебаний ротора в рабочем режиме по первому варианту своей возможной реализации заключается в формировании сигналов управления генератором знакопеременных напряжений, при этом производится измерение углового (прогрессирующего) положения ротора генератора и мгновенной угловой скорости ротора, по которой после полосовой высокочастотной фильтрации определяются текущие значения (необязательно периодических) крутильных колебаний ϕo i ротора, при априори известном операторе L динамического звена "возбудитель - генератор" с входным сигналом - управляющим напряжением на входных контактах возбудителя и выходным сигналом - крутильными колебаниями ротора по формуле
ci=L-1{-ϕo i},
где L-1 - оператор, обратный оператору L, формируется цифровой аналог сi рабочего сигнала управления возбудителем, который после коммутации преобразуется в управляющее знакопеременное напряжение и подается через устройство ввода к контактам возбудителя питания обмоток ротора синхронного генератора таким образом, чтобы возбуждаемая при этом компонента вынужденных крутильных колебаний находилась в противофазе с естественными самовозбуждающимися паразитными крутильными колебаниями.
Предлагаемый способ компенсации крутильных колебаний ротора в рабочем режиме по второму варианту своей возможной реализации заключается в формировании сигналов управления генератором знакопеременных напряжений, при этом производится измерение углового (прогрессирующего) положения ротора генератора и мгновенной угловой скорости ротора, по которой после полосовой высокочастотной фильтрации определяются текущие значения (необязательно периодических) крутильных колебаний ϕo i ротора, при априори неизвестном операторе L до процедуры формирования сигнала сi производится идентификация оператора L путем формирования в задающем генераторе цифровых аналогов тестовых сигналов управления возбудителем генератора, преобразования их после коммутации в управляющие знакопеременные напряжения и их подачи к контактам возбудителя с последующим возбуждением вынужденных крутильных колебаний ротора, которые после их измерения, синхронно с выходными сигналами задающего генератора подаются в идентификатор, в котором производится идентификация оператора L, при этом на входных контактах возбудителя и выходным сигналом - крутильными колебаниями ротора по формуле
ci=L-1{-ϕo i},
где L-1 - оператор, обратный оператору L, формируется цифровой аналог сi рабочего сигнала управления возбудителем, который после коммутации преобразуется в управляющее знакопеременное напряжение и подается через устройство ввода к контактам возбудителя питания обмоток ротора синхронного генератора таким образом, чтобы возбуждаемая при этом компонента вынужденных крутильных колебаний, находилась в противофазе с естественными самовозбуждающимися паразитными крутильными колебаниями.
Устройство для компенсации крутильных колебаний ротора в рабочем режиме включает в себя датчик, например, оптический или вихретоковый, углового положения ротора генератора, модуль-измеритель текущего углового положения ротора генератора, модуль-измеритель текущих значений мгновенной угловой скорости ротора генератора, фильтр верхних частот, модуль-измеритель текущих значений угловых (крутильных) колебаний ротора, задающий генератор цифровых аналогов тестовых сигналов управления синхронным генератором, устройство коммутации, генератор цифровых аналогов тестовых сигналов управления возбудителем, устройство подачи управляющего напряжения на контакты возбудителя синхронного генератора, модуль-идентификатор динамического звена "возбудитель - синхронный генератор", устройство формирования цифровых аналогов рабочих сигналов управления для компенсации крутильных колебаний ротора синхронного генератора, причем выход датчика углового положения ротора генератора связан с входом модуля-измерителя текущих значений мгновенной угловой скорости ротора, с выхода которого передаются данные на модуль-измеритель текущих значений мгновенной угловой скорости ротора генератора, и далее связанные последовательно выходами и входами друг с другом: модуль-измеритель текущих значений мгновенной угловой скорости ротора генератора, фильтр верхних частот, модуль-измеритель текущих значений угловых (крутильных) колебаний ротора, далее с выходами модуля-измерителя текущих значений угловых (крутильных) колебаний ротора генератора своими первыми входами связаны - модуль-идентификатор динамического звена "возбудитель - синхронный генератор" и устройство формирования цифровых аналогов рабочих сигналов управления, при этом другой вход модуля-идентификатора динамического звена "возбудитель - синхронный генератор" соединен с выходом задающего генератора цифровых аналогов тестовых сигналов управления синхронным генератором, а его выход подключен ко второму входу устройства формирования цифровых аналогов рабочих сигналов управления, выход которого подключен к входу устройства коммутации, второй вход которого соединен с выходом задающего генератора цифровых аналогов тестовых сигналов управления синхронным генератором, а выход подключен к входу генератора цифровых аналогов тестовых сигналов, выход которого соединен с входом устройства формирования управляющего напряжения, выход которого подключен к входу возбудителя.
Блок-схема описанного выше устройства приведена на чертеже.
Указанное устройство включает в себя датчик 5 (например, оптический или вихретоковый) углового положения ротора 3 генератора 2, выход которого связан с входом модуля-измерителя текущих значений мгновенной угловой скорости ротора 6, и далее связанные последовательно выходами и входами друг с другом: модуль-измеритель текущих значений мгновенной угловой скорости ротора генератора 7, фильтр верхних частот модуль-измеритель 9 текущих значений угловых (крутильных) колебаний ротора, далее с выходами модуля-измерителя 9 своими входами связаны - модуль-идентификатор динамического звена "возбудитель - синхронный генератор" 14 и устройство формирования цифровых аналогов рабочих сигналов управления 15, при этом другой вход модуля-идентификатора 14 соединен с выходом задающего генератора 10 цифровых аналогов тестовых сигналов управления синхронным генератором, а его выход подключен второму входу устройства 15, выход которого подключен к входу устройства коммутации 11 цифровых аналогов тестовых сигналов управления возбудителем, второй вход которого соединен с выходом задающего генератора 10, выход подключен к входу генератора цифровых аналогов тестовых сигналов 12, выход которого соединен с входом устройства формирования управляющего напряжения 13, выход которого подключен с входом возбудителя 1.
Предлагаемый способ и соответствующее ему устройство работают следующим образом. С помощью посаженного на ротор 3 генератора 2 диска 4 с зубчатым венцом и вихретокового датчика 5 (в варианте использования оптического датчика, на ротор тем или иным способом наносятся метки с разной отражающей способностью) формируется поток электрических импульсов, соответствующих моментам времени прохождения зубьев (или меток) перед посадочным местом датчика 5. При этом вырабатывается один импульс при каждом повороте ротора на угол 2π/n радиан, где n≥2.5fном/fкрmax, fном - номинальная медленноменяющаяся во времени частота вращения синхронного генератора, fкрmax значение верхней частоты диапазона возможных крутильных колебаний ротора. Далее в модуле 6 производится высокоточное измерение моментов ti времени пересечения передних (возможно и/или задних) фронтов потока импульсов и вычисление непосредственно связанного с ними текущего углового положения ϕi ротора синхронного генератора, обусловленного прогрессирующим вращением ротора и его угловыми колебаниями. В модуле 7 по выходным данным от модуля 6 определяются текущие значения мгновенной угловой скорости Ωi ротора генератора, которые в блоке 8 подвергаются процедуре высокочастотной фильтрации с управляемой частотой среза, выбираемой в зависимости от рабочего частотного диапазона паразитных крутильных колебаний ротора. Получаемый при этом центрированный процесс мгновенной угловой скорости Ωo i, крутильных колебаний подается на вход интегрирующего звена 9 - модуля-измерителя текущих значений ϕo i угловых (крутильных) колебаний ротора.
Для одного из вариантов реализации процедур, выполняемых блоками 6-9, соответствующий конечный алгоритм вычисления Ωo i, и ϕo i записывается в виде
Ωo i=(2πTmi/mn)(1/Δti·Δti-1-1/Δt2 i),
ϕo i=2π(1-Tmi/mΔti)/n,
где: Δti=ti-ti-1, Tmi=Δti-m+1+Δti-m+2+...+Δti - суммарная длительность последних m временных интервалов, предшествующих i-му импульсу, m выбирается из условия m>>fkpmax/fкрmin (например, на порядок), fкрmin - нижняя частота диапазона возможных крутильных колебаний ротора.
Пример: Для энергоблока 300 мВт К-3 00-240-1 имеем следующие данные по частотам свободных крутильных колебаний валопровода:
Таким образом, в алгоритме вычисления Ωo i, ϕo i для этого энергоблока следует брать
m>>fkpmax/fkpmin=136,7/17,9=7,6(m≈80) и n>>2,5·fkpmax/fном=2.5·136.7/50≈7.
При априори известном (обычно линейном) операторе L преобразования управляющих воздействий на входе возбудителя в крутильные колебания ротора генератора - ответной реакции на управление, и измеренных указанным выше способом самопроизвольно возбуждаемых крутильных колебаниях ϕo i ротора их компенсация осуществляется путем формирования в устройстве 15 по формуле
Ci=L-1{-ϕo i},
где L-1 - оператор, обратный L, цифрового аналога сi рабочего сигнала управления синхронным генератором.
Если оператор L априори неизвестен или требуется его уточнение (например, при вводе в эксплуатацию нового оборудования или после проведенных ремонтные работ), то до запуска процедур компенсации в модуле-идентификаторе динамического звена "возбудитель - синхронный генератор" 14 решается вспомогательная задача параметрической идентификации динамического звена "возбудитель - генератор". С этой же целью устройство коммутации 11 подключает в цепи управления возбудителя (блоки 12, 13) задающий генератор 10 тестовых сигналов управления.
Последние могут быть и не гармоническими или даже случайными (часто это более информативный подход). По указанной выше схеме измеряются крутильные колебания ротора, как реакции синхронного генератора на тестовые возмущения. Далее для исключения влияния помех одним из известных корреляционных методе решается задача параметрической идентификации динамического звена "возбудитель - синхронный генератор". Наиболее удобно в контексте данной заявки это звено брать в форме дробно-рациональной передаточной функции Н(р) с неизвестными коэффициентами-параметрами a1, а2,..., am, b0, b1, b2,..., bn вида
H(р)=(рm+а1pm-1+...+am)(b0pn+b1pn-1+...+bn)-1
В этом случае компенсирующий рабочий сигнал управления синхронным генератором с (его цифровой аналог) при измеряемых крутильных колебаниях ротора ϕo определяется как решение неоднородного обыкновенного дифференциального уравнения вида 
где

Далее сигнал с через устройство коммутации 11 подается на вход устройства 12 формирования управляющего знакопеременного напряжения ui, которое через устройство ввода 13 подается (например, через посредство щеточного аппарата) на входные контакты возбудителя 1 питания обмоток ротора синхронного генератора: возбуждая в нем вынужденные крутильные колебания ротора в противофазе с естественными крутильными колебаниями, чем и достигается эффект их компенсации.
Обозначения на чертеже
1 - возбудитель,
2 - синхронный генератор,
3 - ротор генератора,
4 - диск с зубчатым венцом, установленный на роторе генератора,
5 - датчик углового положения ротора (например, вихретоковый или оптический),
6 - модуль-измеритель текущего углового положения ротора генератора,
7 - модуль-измеритель текущих значений мгновенной угловой скорости ротора генератора,
8 - фильтр верхних частот,
9 - модуль-измеритель текущих значений угловых (крутильных) колебаний ротора,
10 - задающий генератор цифровых аналогов тестовых сигналов управления синхронным генератором,
11 - устройство коммутации,
12 - генератор цифровых аналогов тестовых сигналов управления возбудителем,
13 - устройство подачи управляющего напряжения на контакты возбудителя синхронного генератора,
14 - модуль-идентификатор динамического звена «возбудитель - синхронный генератор»,
15 - устройство формирования цифровых аналогов рабочих сигналов управления для компенсации крутильных колебаний ротора синхронного генератора.
Данная группа изобретений относится к синхронным генераторам, а именно к получению исходных данных для определения на переходных и установившихся режимах текущих значений параметров синхронного генератора, необходимых для компенсации крутильных колебаний его ротора. Указанная группа изобретений направлена на разработку способов и реализующего их устройства компенсации самопроизвольно возбуждаемых (необязательно периодических) кратковременных, длительных или постоянно действующих крутильных колебаний ротора синхронного генератора. Устройство для компенсации крутильных колебаний ротора в рабочем режиме включает в себя датчик углового положения ротора генератора, модуль-измеритель текущего углового положения ротора генератора, модуль-измеритель текущих значений мгновенной угловой скорости ротора генератора, фильтр верхних частот, модуль-измеритель текущих значений угловых (крутильных) колебаний ротора, задающий генератор цифровых аналогов тестовых сигналов управления синхронным генератором, устройство коммутации, генератор цифровых аналогов тестовых сигналов управления возбудителем, устройство подачи управляющего напряжения на контакты возбудителя синхронного генератора, модуль-идентификатор динамического звена "возбудитель - синхронный генератор" и устройство формирования цифровых аналогов рабочих сигналов управления для компенсации крутильных колебаний ротора синхронного генератора, соответствующим образом соединенных между собой. Описанное устройство реализует два варианта способа компенсации крутильных колебаний ротора. 3 н.п. ф-лы, 1 ил., 1 табл.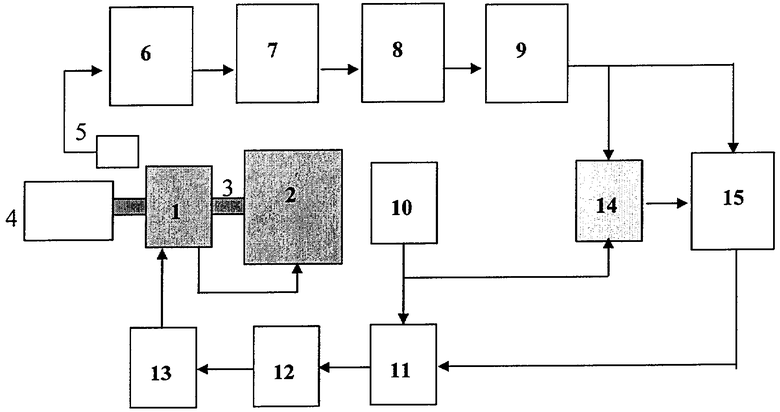
ci=L-1{-ϕo i},
где L-1 - оператор, обратный оператору L, формируется цифровой аналог сi рабочего сигнала управления возбудителем, который после коммутации преобразуется в управляющее знакопеременное напряжение и подается через устройство ввода к контактам возбудителя питания обмоток ротора синхронного генератора таким образом, чтобы возбуждаемая при этом компонента вынужденных крутильных колебаний находилась в противофазе с естественными самовозбуждающимися паразитными крутильными колебаниями.
ci=L-1{-ϕo i},
где L-1 - оператор, обратный оператору L, формируется цифровой аналог сi рабочего сигнала управления возбудителем, который после коммутации преобразуется в управляющее знакопеременное напряжение и подается через устройство ввода к контактам возбудителя питания обмоток ротора синхронного генератора таким образом, чтобы возбуждаемая при этом компонента вынужденных крутильных колебаний находилась в противофазе с естественными самовозбуждающимися паразитными крутильными колебаниями.
| СПОСОБ И МОНИТОРИНГОВАЯ СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ И АВАРИЙНОЙ ЗАЩИТЫ ЛОПАТОЧНЫХ АППАРАТОВ РОТОРНЫХ ДВИГАТЕЛЕЙ | 2002 |
|
RU2241216C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ВАЛОВ РОТОРНЫХ МАШИН, ПЕРЕДАЮЩИХ КРУТИЛЬНЫЕ НАГРУЗКИ | 2002 |
|
RU2239803C2 |
| Машина для выворачивания мешков | 1938 |
|
SU55223A1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ АМПЛИТУДО-ЧАСТОТНЫХ И ФАЗО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК КАЧАНИЙ РОТОРА СИНХРОННОГО ГЕНЕРАТОРА В РАБОЧЕМ РЕЖИМЕ | 2002 |
|
RU2233455C2 |
| US 6232733 A, 15.05.2001. | |||

