Изобретение относится к антенной технике и может быть использовано для стабилизации антенн, установленных на подвижных объектах.
Известно стабилизированное опорно-поворотное устройство (А.с. СССР №1688326), содержащее азимутальную платформу, основание, кардановы подвесы, приводы поворота, стабилизаторы и центрирующий механизм.
Известно также антенное устройство сопровождения спутников (заявка на изобретение РФ №94007055), содержащее неподвижное основание, стабилизированную платформу, размещенную в кардановом подвесе, гироскопические стабилизационные элементы, антенну, приводы, преобразователь координат, датчики углов поворота, усилители мощности, акселерометры, блоки коррекции, интеграторы, фильтры, сумматоры. Данное устройство является наиболее близким аналогом (прототипом) заявляемого изобретения.
Недостатками данных устройств являются невысокая точность стабилизации и сложность конструкции.
Задачей, на решение которой направлено предлагаемое изобретение, является расширение арсенала технических средств указанного назначения, а именно создание устройства для полной стабилизации различных устройств, в частности, антенн.
Техническими результатами при реализации изобретения являются, в частности, повышение точности стабилизации, упрощение конструкции и технологии изготовления, повышение прочности, жесткости и надежности конструкции, уменьшение массы, снижение расчетной мощности двигателей, повышение эксплуатационных характеристик, расширение возможностей построения антенных постов.
Влияние на достижение указанных технических результатов оказывают нижеприведенные отличительные признаки. Устройство стабилизации состоит из неподвижного основания, стабилизированной платформы, первого и второго исполнительных двигателей, первого и второго исполнительных механизмов, оси которых не совпадают с осями стабилизации, датчиков углов поворота и карданова подвеса, оси которого совпадают с осями стабилизации и первое звено подвеса закреплено на неподвижном основании, а второе - на стабилизированной платформе, причем крепление первого звена карданова подвеса осуществляется при помощи стоек. Крестовина карданова подвеса выполнена с отверстием. В качестве исполнительных механизмов использованы шариковинтовые пары. Допустимые углы поворота датчиков углов поворота превышают допустимые углы поворота стабилизированной платформы в 2 и более раз.
В предлагаемом изобретении исполнительные механизмы одним концом шарнирно опираются на неподвижное основание, а другим - на стабилизированную платформу через коромысло и обеспечивают одновременную стабилизацию по двум взаимно перпендикулярным осям стабилизации. Оси исполнительных механизмов не совпадают с осями стабилизации, что позволяет освободить оси стабилизации для размещения на них датчиков углов поворота и элементов высокочастотных поворотных сочленений для передачи энергии на стабилизированную платформу. Одновременная работа двух исполнительных механизмов для стабилизации по двум осям снижает нагрузку на каждый механизм. При расположении их под углом ˜45° к осям стабилизации нагрузка на каждый из них снижается в  раза, что позволяет снизить мощность исполнительных двигателей. Кроме того, при вращающейся внешней нагрузке на оси стабилизации нагрузка на исполнительные механизмы и исполнительные двигатели распределяется более эффективно. В качестве исполнительных механизмов используются шариковинтовые пары, преобразующие вращательное движение исполнительного двигателя в поступательное движение винта или гайки. В качестве исполнительных двигателей могут применяться, в частности, высокомоментные электродвигатели. Применение шариковинтовых пар и высокомоментных электродвигателей упрощает конструкцию и технологию изготовления, а также повышает надежность. Для получения необходимого радиуса приложения сил при создании крутящего момента на осях стабилизации используется коромысло, закрепленное на стабилизированной платформе, что позволяет конструировать устройства стабилизации в широком диапазоне моментов и мощностей и расширяет возможности построения антенных постов. С целью повышения точности стабилизации в качестве датчиков углов поворота могут использоваться, в частности, цифровые датчики угловых перемещений, установленные так, что допустимые углы поворота датчиков в 2 и более раз превышают допустимые углы поворота стабилизированной платформы. Карданов подвес выполнен в виде крестовины с отверстием, через которое на стабилизированную платформу могут проходить элементы ВЧ тракта.
раза, что позволяет снизить мощность исполнительных двигателей. Кроме того, при вращающейся внешней нагрузке на оси стабилизации нагрузка на исполнительные механизмы и исполнительные двигатели распределяется более эффективно. В качестве исполнительных механизмов используются шариковинтовые пары, преобразующие вращательное движение исполнительного двигателя в поступательное движение винта или гайки. В качестве исполнительных двигателей могут применяться, в частности, высокомоментные электродвигатели. Применение шариковинтовых пар и высокомоментных электродвигателей упрощает конструкцию и технологию изготовления, а также повышает надежность. Для получения необходимого радиуса приложения сил при создании крутящего момента на осях стабилизации используется коромысло, закрепленное на стабилизированной платформе, что позволяет конструировать устройства стабилизации в широком диапазоне моментов и мощностей и расширяет возможности построения антенных постов. С целью повышения точности стабилизации в качестве датчиков углов поворота могут использоваться, в частности, цифровые датчики угловых перемещений, установленные так, что допустимые углы поворота датчиков в 2 и более раз превышают допустимые углы поворота стабилизированной платформы. Карданов подвес выполнен в виде крестовины с отверстием, через которое на стабилизированную платформу могут проходить элементы ВЧ тракта.
На чертеже приведена кинематическая схема устройства стабилизации.
Устройство стабилизации содержит неподвижное основание 1, стабилизированную платформу 2 и карданов подвес 3, оси которого совпадают с осями стабилизации 4 и 5, причем первое звено карданова подвеса 3 закреплено на неподвижном основании 1 с помощью стоек 6 и 7, а второе - на стабилизированной платформе 2. Датчики углов поворота 8 и 9, в качестве которых могут быть использованы цифровые датчики угловых перемещений, установлены на осях стабилизации 4 и 5. Исполнительные механизмы 10 и 11 выполнены в виде шариковинтовых пар и соединены с исполнительными двигателями 12 и 13, в качестве которых могут применяться высокомоментные электродвигатели. При этом исполнительные механизмы 10 и 11 шарнирно закреплены одним концом на неподвижном основании 1, а другим - на стабилизированной платформе 2 через коромысло 14. Оси исполнительных механизмов 15 не совпадают с осями стабилизации 4 и 5.
Работа устройства стабилизации происходит следующим образом. При отклонении стабилизированной платформы 2 от заданного положения, команды от датчиков углов поворота 8 и 9 через систему управления поступают на исполнительные двигатели 12 и 13, которые передают движение на исполнительные механизмы 10 и 11, преобразующие вращательное движение электродвигателей в поступательное движение винта или гайки. При вращении обоих исполнительных механизмов 10 и 11 в одну сторону и, следовательно, перемещении винта или гайки в одну сторону происходит поворот стабилизированной платформы 2 вокруг оси стабилизации 4, т.е. происходит стабилизация по одной оси. При вращении исполнительных механизмов 10 и 11 в разные стороны происходит поворот стабилизированной платформы 2 вокруг другой оси стабилизации 5, т.е. происходит стабилизация по другой оси. При подаче сигналов одновременно от обоих датчиков углов поворота 8 и 9 происходит одновременный поворот стабилизированной платформы 2 вокруг обеих осей стабилизации 4 и 5, т.е. полная стабилизация по обеим осям.
Изобретение относится к антенной технике и может быть использовано для стабилизации антенн, установленных на подвижных объектах. Технический результат заключается в расширении возможностей построения антенных постов, повышении точности стабилизации, упрощении конструкции. Сущность изобретения состоит в том, что в устройстве стабилизации, состоящем из неподвижного основания, стабилизированной платформы, карданова подвеса, датчиков углов поворота, исполнительных двигателей и исполнительных механизмов, оси карданова подвеса совпадают с осями стабилизации, первое звено подвеса закреплено на неподвижном основании, а второе - на стабилизированной платформе. Исполнительные механизмы, оси которых не совпадают с осями стабилизации, шарнирно закреплены одним концом на неподвижном основании, а другим - на стабилизированной платформе через коромысло. В качестве исполнительных механизмов использованы шариковинтовые пары. 4 з.п. ф-лы, 1 ил.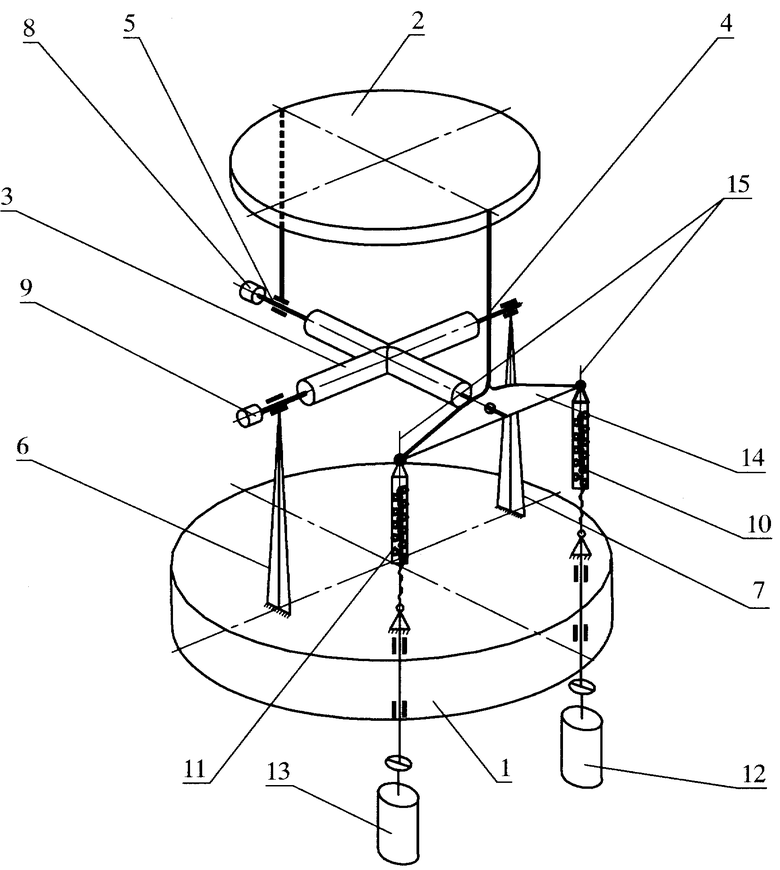
| RU 2075254 C1, 10.03.1997 | |||
| УСТРОЙСТВО для НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ РАДИОТЕЛЕСКОПА | 0 |
|
SU313248A1 |
| US 3893123, 01.07.1975 | |||
| Способ получения брассиловой кислоты | 1976 |
|
SU649703A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПЛОТНОЙ ПИТАТЕЛЬНОЙ СРЕДЫ ДЛЯ КУЛЬТИВИРОВАНИЯ БАКТЕРИЙ САMPYLOBACTER JEJUNI И CAMPYLOBACTER COLI | 2008 |
|
RU2378368C2 |

