Изобретение относится к средствам неразрушающего контроля материалов и может быть использовано для систем автоматизированного контроля рельсов, уложенных в путь, и других длинномерных объектов, в частности в устройствах, использующих магнитные методы неразрушающего контроля с высокой разрешающей способностью в широком диапазоне скоростей (от скоростей, близких к нулю, до максимально возможной скорости контроля).
Известен электромагнитный преобразователь для неразрушающего контроля, содержащий магнитопровод и размещенные на нем возбуждающую и измерительную обмотки, при этом возбуждающая обмотка выполнена многофазной для создания вращающегося магнитного поля и размещена совместно с измерительной обмоткой непосредственно на поверхности магнитопровода или в выполненных в нем соответствующих пазах, преобразователь выполнен с возможностью поступательного перемещения относительно контролируемого изделия. При поступательном движении преобразователя относительно контролируемого изделия при отсутствии дефектов сигнал на измерительной обмотке отсутствует. В случае появления на изделии дефектов: продольных и поперечных - симметрично вращающееся магнитное поле становится несимметричным (появляются высшие гармоники). На измерительной обмотке наводится ЭДС, определяющая местонахождение и параметры дефектов, т.е. происходит изменение магнитного поля в зависимости от вида и размеров дефекта (RU 2112234 C1, G01N 27/90, 27.05.98). Параметры электромагнитного преобразователя (в том числе избирательность и разрешающая способность) позволяют осуществить достоверный контроль изделий. К недостаткам электромагнитного преобразователя следует отнести ограниченный диапазон (в области малых скоростей) его скорости поступательного движения относительно контролируемого изделия.
В качестве прототипа принят магнитоэлектрический датчик дефектов, содержащий постоянный магнит и измерительные обмотки, на полюсах магнита на равном расстоянии друг от друга установлены магнитопроводящие полосовые наконечники, которые охвачены измерительными обмотками, соединенными с соответствующими обмотками другого полюса (RU 2097759 C1, G01N 27/90, 27.11.97). Магнитоэлектрический датчик дефектов обладает высокой избирательностью и разрешающей способностью и имеет простую конструкцию. При движении датчика относительно поверхности контролируемого изделия в случае отсутствия дефектов сигнал на измерительных обмотках отсутствует. Наличие дефекта, воздушной раковины или другой магнитной неоднородности изменяет магнитные сопротивления элементарных контуров, что приводит к появлению сигнала на измерительной обмотке в зависимости от размера дефекта и его местонахождения. Дефектоскопы с установленными такими магнитоэлектрическими датчиками могут обеспечивать относительно высокую рабочую скорость контроля. Однако такие датчики не предназначены для малых рабочих скоростей контроля.
Технический результат заключается в создании датчика для систем автоматизированного магнитного контроля рельсов в широком диапазоне рабочих скоростей контроля.
Технический результат достигается тем, что модульный датчик для систем автоматизированного магнитного контроля рельсов, содержащий корпус, внутри которого размещен индуктивный измерительный преобразователь, снабжен магниторезистивным и/или феррозондовым измерительными преобразователями и управляемым коммутатором, измерительные преобразователи размещены внутри корпуса, а их выходы соединены с соответствующими входами управляемого коммутатора, выход которого является выходом датчика, управляющий вход датчика через пороговый блок соединен с входом управления коммутатора.
На чертеже представлена схема модульного датчика для систем автоматизированного магнитного контроля рельсов.
Модульный датчик для систем автоматизированного магнитного контроля рельсов содержит корпус 1, внутри которого размещен индуктивный измерительный преобразователь 2, магниторезистивный измерительный преобразователь 3 и/или феррозондовый измерительный преобразователь 4, выходы измерительных преобразователей 2, 3 и 4 соединены с соответствующими (первым, вторым и третьим) входами коммутатора 5, выход которого является выходом датчика, управляющий вход датчика через пороговый блок 6 соединен с входом управления коммутатора 5.
Модульный датчик для систем автоматизированного магнитного контроля рельсов используют следующим образом. Модульный датчик устанавливается на подвижном средстве таким образом, чтобы он располагался над поверхностью контролируемого объекта (рельса). Наличие корпуса, внутри которого установлены измерительные преобразователи 2, 3 и/или 4, препятствует внешнему воздействию (пыли, влаги и т.д.) на эти преобразователи. Выход датчика подключают к входу блока обработки сигналов устройства дефектоскопии, а его управляющий вход соединяют с выходом датчика скорости, размещенным на буксе подвижного средства (вагона, автомотрисы и т.д.). При малых скоростях движения (приблизительно до 10 км/час) датчик перемещается с малой линейной скоростью относительно контролируемого рельса. При этом сигнал на выходе датчика скорости имеет величину, недостаточную для срабатывания порогового блока 6. Поэтому коммутатор 5 обеспечивает соединение выхода магниторезистивного измерительного преобразователя 3 с выходом датчика. Выходным сигналом датчика, который поступает на вход блока обработки сигналов устройства дефектоскопии, будет сигнал, снимаемый с выхода магниторезистивного измерительного преобразователя 3 или феррозондового измерительного преобразователя 4, которые надежно функционируют и обеспечивают требуемую достоверность выявления дефектов в контролируемом объекте (рельсе) в диапазоне малых линейных скоростей перемещения. При установке в модульном датчике одновременно магниторезистивного и феррозондового измерительных преобразователей 3 и 4 каждый из них используется в своем диапазоне линейных скоростей перемещения. Это позволяет повысить достоверность контроля, поскольку измерительные преобразователи осуществляют надежное выявление дефектов в изделии только при вполне определенном диапазоне линейных скоростей перемещения. В данном случае при увеличении скорости пороговый блок 6 вырабатывает сигнал, обеспечивающий подключение к выходу датчика феррозондового измерительного преобразователя 4. При дальнейшем возрастании скорости подвижного средства сигнал на выходе датчика скорости увеличивается. При превышении уровня заданного порога выходным сигналом датчика скорости пороговый блок 6 формирует сигнал управления, который обеспечивает соединение выхода индуктивного измерительного преобразователя 2 с выходом датчика. Выходным сигналом датчика, поступающим на вход блока обработки сигналов устройства дефектоскопии, будет сигнал, снимаемый с выхода индуктивного измерительного преобразователя 2, который стабильно работает при относительно высоких рабочих скоростях контроля (приблизительно в диапазоне от 10 до 70 км/час и более). Снижение скорости движения, при которой уровень выходного сигнала датчика скорости будет ниже уровня порога срабатывания порогового элемента 5, приведет к переключению коммутатора 4, который установит первоначальное соединение выхода магниторезистивного измерительного преобразователя 3 с выходом датчика или соединение с выходом датчика феррозондового измерительного преобразователя 4. Таким образом, выполнение датчика в виде двух и более измерительных преобразователей, соединенных с выходом устройства посредством управляемого коммутатора, позволило создать датчик, функционирующий в широком диапазоне рабочих скоростей контроля, причем нижняя граница скорости контроля близка к нулю. Установка таких датчиков в дефектоскопах позволит осуществлять автоматизированный магнитный контроль рельсов при скоростях подвижного средства от 0 до 70÷100 км/час.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2006 |
|
RU2310836C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2005 |
|
RU2299430C1 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ДЛЯ ДЕФЕКТОСКОПИИ КОЛЕСНЫХ ПАР ВАГОНОВ | 2005 |
|
RU2289128C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2005 |
|
RU2299428C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РЕЛЬСОВОГО ПУТИ | 2004 |
|
RU2266225C1 |
| УСТРОЙСТВО НАМАГНИЧИВАНИЯ ДЛЯ СРЕДСТВ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 2006 |
|
RU2313782C2 |
| СПОСОБ КОМПЛЕКСНОЙ ДИАГНОСТИКИ СВАРНЫХ ШВОВ РЕЛЬСОВ БЕССТЫКОВОГО ПУТИ И ПРИБОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2742599C1 |
| Способ магнитной дефектоскопии | 1987 |
|
SU1569693A1 |
| Феррозондовый дефектоскоп | 1977 |
|
SU739387A1 |
| ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ РЕЛЬСОВ | 2018 |
|
RU2686409C1 |
Изобретение относится к средствам неразрушающего контроля материалов и может быть использовано для систем автоматизированного контроля рельсов, уложенных в путь, и других длинномерных объектов, в частности в устройствах, использующих магнитные методы неразрушающего контроля. Технический результат: создание датчика для систем автоматизированного магнитного контроля рельсов в широком диапазоне рабочих скоростей контроля. Сущность: датчик содержит корпус, внутри которого размещен индуктивный измерительный преобразователь, магниторезистивный и/или феррозондовый измерительные преобразователи. Выходы измерительных преобразователей соединены с соответствующими входами управляемого коммутатора. Выход коммутатора является выходом датчика. Управляющий вход датчика через пороговый блок соединен с входом управления коммутатора. 1 ил.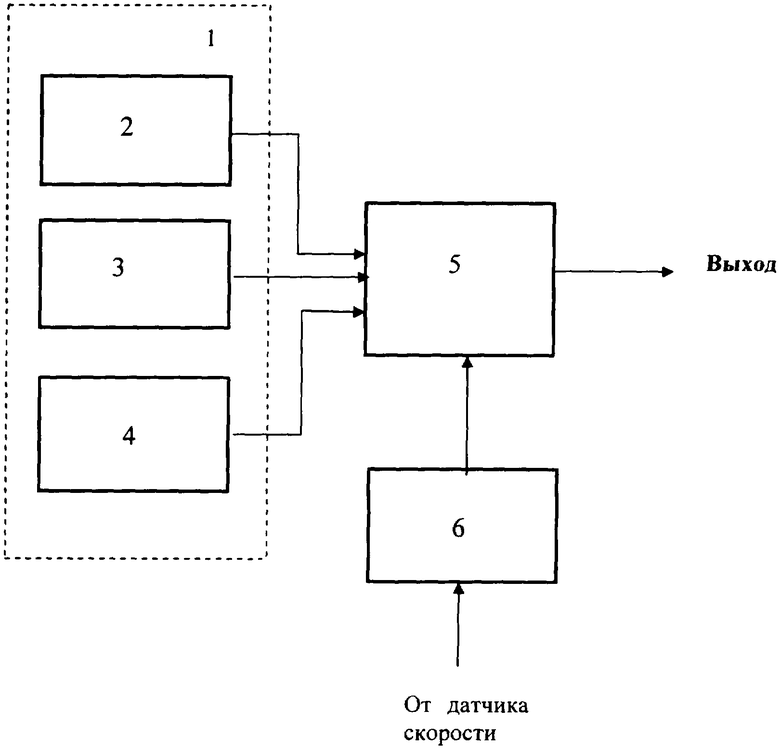
Модульный датчик для систем автоматизированного магнитного контроля рельсов, содержащий корпус, внутри которого размещен индуктивный измерительный преобразователь, отличающийся тем, что он снабжен магниторезистивным и/или феррозондовым измерительными преобразователями и управляемым коммутатором, измерительные преобразователи размещены внутри корпуса, а их выходы соединены с соответствующими входами управляемого коммутатора, выход которого является выходом датчика, управляющий вход датчика через пороговый блок соединен с входом управления коммутатора.
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК ДЕФЕКТОВ | 1995 |
|
RU2097759C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 1995 |
|
RU2112234C1 |
| ПАТЕНТНО-] [ХНН^ЕлКАН; | 0 |
|
SU374172A1 |

