Изобретение относится к технике дефектоскопии, используемой для обнаружения дефектов в рельсах железнодорожного транспорта и метрополитена.
Контроль состояния рельсового пути имеет исключительно важное значение для обеспечения безопасности на железнодорожных магистралях и метрополитене, определяющим фактором которой является отсутствие дефектов в рельсах. Для выявления дефектов в рельсах используются дефектоскопы, реализующие ультразвуковой и магнитный методы неразрушающего контроля, устанавливаемые преимущественно на скоростных мобильных средствах. Такие дефектоскопы должны обладать высокой надежностью выявления дефектов любых возможных видов с высокой точностью, чтобы своевременно принимать меры к обоснованному экстренному ремонту рельсового пути, а так же объективно устанавливать и корректировать периодичность его соответствующих проверок. При этом, например, простое увеличение количества дефектоскопных датчиков малоэффективно с точки зрения достоверности и объективности контроля.
Работа традиционных многоканальных ультразвуковых дефектоскопов основана на возбуждении зондирующих импульсов и регистрации и анализе принимаемых эхо-сигналов, поступающих одновременно от нескольких ультразвуковых преобразователей в реальном времени. Такие дефектоскопы позволяют получить картину расположения отражателей в контролируемом участке рельса, используемую для идентификации дефектов в рельсе (например, US 5777891 А, 1998).
Известен, например, ультразвуковой дефектоскоп, включающий несколько ультразвуковых каналов, выполненных на основе генераторов зондирующих импульсов, усилителей принимаемых эхо-сигналов, пороговых элементов и блоков предварительной обработки (фильтрации сигналов), при этом к ультразвуковым каналам подключен синхронизатор, их выходы через соответствующие интерфейсы и блок памяти связаны с компьютером, а для привязки к параметрам пути в дефектоскоп введен блок определения путейской координаты и скорости, соединенный с датчиком пути (RU 5033 U1, 1997). Выделение эхо-сигналов на фоне помех и идентификация видов дефектов осуществляется на основе изменения временной задержки эхо-сигналов относительно зондирующих импульсов в последовательных циклах излучения-приема ультразвуковых сигналов, при этом обработка получаемых сигналов включает фильтрацию эхо-сигналов с амплитудой менее заданного порога и эхо-сигналов достаточной амплитуды, что позволяет несколько повысить точность контроля. Однако в этом дефектоскопе осуществляется только начальная фильтрация в виде «отсечки снизу». Отсутствие дальнейшей фильтрации приводит к существенной перебраковке ввиду большого количества сигналов, прошедших начальный этап, что не позволяет обеспечить достаточную надежность ультразвукового контроля. Управление аппаратными параметрами (усилителями и генераторами зондирующих импульсов) не может осуществляться непосредственно в процессе контроля. Кроме того, отсутствие в составе дефектоскопа магнитных каналов не позволяет обнаруживать некоторые дефекты в рельсах, которые могут эффективно выявляться магнитным методом. Поэтому такой дефектоскоп недостаточно эффективен в эксплуатации, не обеспечивая в необходимой мере объективность и достоверность контроля.
Известны также дефектоскопы магнитного типа для обнаружения дефектов в рельсах. Известен, например, дефектоскоп, содержащий средство намагничивания, индуктивный, магниторезистивный и феррозондовый преобразователи, связанные через управляемый коммутатор с блоком обработки сигналов, к которому подключены блоки регистрации и индикации, содержит также датчик скорости, связанный через блок формирования сигналов управления с управляемым коммутатором (RU 2310836 C1, 2007). Однако такие дефектоскопы малоинформативны, позволяя выявлять только ограниченный круг дефектов, обычно крупноразмерных.
Известны и другие дефектоскопы для контроля рельсов (например, SU 1566283 А1, 1990; RU 2227911 С1, 2004; US 4457178 А, 1984; US 4700754 А, 1987; ЕР 978436 А1, 2000; ЕР 3182113 А1, 2017; JP 2006132987 А, 2006). Однако все они в той или иной мере не отвечают требованию высокой эксплуатационной эффективности.
Из известных устройств наиболее близким к предложенному является дефектоскоп для контроля рельсов, содержащий связанные между собой управляющий процессор и исполнительный блок и соединенный с ними блок питания, при этом управляющий процессор включает блок ввода и корректировки данных и связанные между собой блок формирования градиентного порога, блок управления параметрами ультразвукового контроля, блок формирования развертки по амплитуде, блок формирования развертки по пройденному пути, блок вывода данных и дисплей, а исполнительный блок включает основной ультразвуковой канал, состоящий из усилителя, выполненного с обеспечением возможности его подключения к выходу ультразвукового преобразователя, соединенного с ним аналого-цифрового преобразователя и генератора зондирующих импульсов, выполненного с обеспечением возможности его подключения ко входу ультразвукового преобразователя (RU 180038 U1, 2018). В этом дефектоскопе обеспечивается дополнительная оптимизированная фильтрация сигналов, обеспечиваемая блоком формирования градиентного порога. Однако дефектоскоп выполнен одноканальным и поэтому для возможности выявления дефектов различного вида по всему сечению рельсов приходится подключать отдельные ультразвуковые преобразователи и индивидуальную настройку, что неудобно и трудоемко при эксплуатации дефектоскопа. Это делает невозможным его применения при сплошном контроле рельсов, т.е. контроле рельсов по всему сечению за один проход. Отсутствует магнитный канал, что не позволяет эффективно выявить дефекты, выявление которых ультразвуковым методом затруднено. Кроме того, отсутствует возможность управления аппаратными параметрами в автоматизированном режиме в процессе контроля, необходимого для объективного выявления дефектов ультразвуковыми преобразователями различных видов. Отсутствует обратная связь управляющего процессора с исполнительным блоком. Все это в целом не позволяет обеспечить высокую достоверность и объективность результатов контроля и усложняет процесс контроля, поэтому такой дефектоскоп недостаточно эффективен в эксплуатации.
Техническая проблема, решаемая изобретением, заключается в создании дефектоскопа для контроля рельсов, лишенного недостатков прототипа. Технический результат, обеспечиваемый изобретением, состоит в повышении эксплуатационной эффективности дефектоскопа, в том числе за счет повышения объективности и достоверности контроля при выявлении дефектов в рельсах, а также повышения производительности контроля.
Это достигается тем, что в дефектоскопе для контроля рельсов, содержащем связанные между собой управляющий процессор и исполнительный блок и соединенный с ними блок питания, при этом управляющий процессор включает блок ввода и корректировки данных и связанные между собой блок формирования градиентного порога, блок управления параметрами ультразвукового контроля, блок формирования развертки по амплитуде, блок формирования развертки по пройденному пути, блок вывода данных и дисплей, а исполнительный блок включает основной ультразвуковой канал, состоящий из усилителя, выполненного с обеспечением возможности его подключения к выходу ультразвукового преобразователя, соединенного с ним аналого-цифрового преобразователя и генератора зондирующих импульсов, выполненного с обеспечением возможности его подключения ко входу ультразвукового преобразователя, в исполнительный блок введены два магнитных канала, каждый из которых состоит из аналого-цифрового преобразователя и соединенного с ним усилителя, выполненного с обеспечением возможности подключения к нему магнитного датчика, выполненные аналогично основному дополнительные ультразвуковые каналы, количество которых выбрано из условия обеспечения возможности полного ультразвукового контроля рельсов по всему их сечению, и последовательно соединенные блок сбора информации, блок обработки команд управления, связанные со всеми ультразвуковыми и магнитными каналами, и контроллер, связанный с блоком ввода и корректировки данных, блоком формирования градиентного порога и блоком управления параметрами ультразвукового контроля, при этом выход каждого из аналого-цифровых преобразователей подключен к соответствующему входу блока сбора информации, а управляющий вход каждого из усилителей и генераторов зондирующих импульсов подключен к соответствующему выходу блока обработки команд управления. Количество дополнительных ультразвуковых каналов может составлять семнадцать. Блок обработки команд управления может быть выполнен с обеспечением возможности его подключения к внешнему блоку синхронизации.
Указанный технический результат обеспечивается всей совокупностью существенных признаков заявленного изобретения, каждый признак которой необходим, а вместе они достаточны для решения указанной технической проблемы и для достижения указанного технического результата. Дефектоскоп для контроля рельсов представляет собой единое устройство. Его электронные узлы, характеризуемые соответствующими существенными признаками, находятся в конструктивно-функциональном единстве. Их совместное использование привело к созданию нового устройства с указанным техническим результатом.
На чертеже показана структурная блок-схема дефектоскопа для контроля рельсов. Он содержит управляющий процессор 1, исполнительный блок 2 и соединенный с ними блок 3 питания. Управляющий процессор 1 включает блок 4 ввода и корректировки данных и связанные между собой блок 5 формирования градиентного порога, блок 6 управления параметрами ультразвукового контроля, блок 7 формирования развертки по амплитуде, блок 8 формирования развертки по пройденному пути, блок 9 вывода данных и дисплей 10. Исполнительный блок 2 включает основной ультразвуковой канал 11, который состоит из усилителя 12, соединенного с ним аналого-цифрового преобразователя 13 и генератора 14 зондирующих импульсов. Разрядность аналого-цифрового преобразователя 13 составляет преимущественно двенадцать. Усилитель 12 выполнен с обеспечением возможности его подключения (своим соответствующим входом) к выходу ультразвукового преобразователя (УЗП) 15, а генератор 14 зондирующих импульсов выполнен с обеспечением возможности его подключения (своим выходом) ко входу УЗП 15. В исполнительный блок 2 введены два магнитных канала 16 и 17. Каждый из них состоит из аналого-цифрового преобразователя 18 и соединенного с ним усилителя 19. Разрядность аналого-цифровых преобразователей 18 составляет преимущественно двадцать четыре. Каждый усилитель 19 выполнен с обеспечением возможности подключения к нему (к его входу) магнитного датчика (МД) 20. Количество МД 20 составляет два - по одному на каждую нить рельсового пути. В качестве МД 20 преимущественно служат магнитодинамические пассивные датчики, выполненные на основе катушек индуктивности. В исполнительный блок 2 введены также дополнительные ультразвуковые каналы 21, выполненные аналогично основному ультразвуковому каналу 11 (содержащие аналогичные блоки 12, 13, 14). Их количество выбрано из условия обеспечения возможности полного ультразвукового контроля рельсов (выявлению всех основных видов дефектов в них, определяемых ультразвуковым методом) по всему их сечению и может составлять, например, семнадцать. Соответственно этому выбрано и количество УЗП 15, в качестве которых служат преимущественно пьезоэлектрические преобразователи, при этом все ультразвуковые каналы 11, 21 «обслуживаются» разными УЗП 15, конкретные тип и настройка которых связаны с конкретными типом и местоположением выявляемого (возможного) дефекта по всему сечению рельса. Общее количество УЗП 15 составляет преимущественно восемнадцать - по девять на каждую нить рельсового пути. В случае использования УЗП 15 в виде пьезоэлектрических преобразователей используются, например, их следующие виды: прямой раздельно-совмещенный; совмещенные с углом ввода 40 градусов без азимутального разворота, излучающие как в направлении движения средства контроля, так и против него; совмещенные с углом ввода 70 градусов без азимутального разворота, излучающие как в направлении движения средства контроля, так и против него; совмещенные с углом ввода 70 градусов с азимутальным разворотом в рабочую и нерабочую грань головки рельса, излучающие как в направлении движения средства контроля, так и против него; совмещенные с углом ввода 58 градусов с азимутальным разворотом в рабочую и нерабочую грань головки рельса, излучающие как в направлении движения средства контроля, так и против него. Также в исполнительный блок 2 введены последовательно соединенные между собой блок 22 сбора информации, блок 23 обработки команд управления и контроллер 24. Блок 22 сбора информации и блок 23 обработки команд управления связаны со всеми ультразвуковыми каналами - с основным ультразвуковым каналом 11 и дополнительными ультразвуковыми каналами 21, и с магнитными каналами 16, 17. Контроллер 24 связан с блоком 4 ввода и корректировки данных, блоком 5 формирования градиентного порога и блоком 6 управления параметрами ультразвукового контроля. Выход каждого из аналого-цифровых преобразователей 13, 18 в основном 11 и дополнительных 21 ультразвуковых каналах и магнитных каналах 16, 17 подключен к соответствующему входу блока 22 сбора информации, а управляющий вход каждого из усилителей 12, 19 и генераторов 14 зондирующих импульсов в основном 11 и дополнительных 21 ультразвуковых каналов подключен к соответствующему выходу блока 23 обработки команд управления. Блок 23 обработки команд управления может быть выполнен с обеспечением возможности его подключения к внешнему блоку 25 синхронизации в случае использования режима внешней синхронизации. К внешнему блоку 25 синхронизации или к блоку 23 обработки команд управления могут быть подключены датчик угла поворота (датчик пути и скорости), устанавливаемый в буксовом узле колесной пары, кнопка служебной отметки и пульт дистанционной отметки (на чертеже не показаны). Эти электронные узлы, как и УЗП 15, МД 20 и внешний синхронизатор 25, не входят непосредственно в состав ультразвукового дефектоскопа как такового и являются самостоятельными электронными узлами, работающими совместно с дефектоскопом. Блок 23 обработки команд управления выполнен в виде многофункционального многоканального электронного узла, который может реализовать, в том числе синхронизацию магнитных каналов 16, 17 и ультразвуковых каналов 11, 21.
Дефектоскоп работает в многоканальном режиме. При включении дефектоскопа в блоке 23 обработки команд управления или во внешнем синхронизаторе 25 начинают вырабатываться синхроимпульсы. Частота синхроимпульсов формируется как произведение двух значений - частоты импульсов с датчика угла поворота и цифрового значения, заданного управляющим процессором 1. При этом частота синхроимпульсов связана со скоростью проведения контроля. Чем выше эта скорость, тем, при условии сохранения неизменного шага контроля, выше требуется частота. Блок 23 обработки команд управления осуществляет передачу данных, прием и обработку команд управления с управляющего процессора 1 через контроллер 24 и обеспечивает синхронизацию работы первого 16, второго 17 магнитного канала, основного 11 и дополнительных 21 ультразвуковых каналов, прием от них данных и трансляцию им упорядоченных команд управления. В каждом из всех ультразвуковых каналах 11, 21 при поступлении синхроимпульсов генератор 14 зондирующих импульсов формирует последовательность импульсов, возбуждающих УЗП 15. Эхо-сигналы, принимаемые УЗП 15, поступают на усилитель 12, с выхода которого сигналы поступают на вход аналого-цифрового преобразователя 13, где преобразуются в цифровую форму, и далее считываются блоком 22 сбора информации. Динамический диапазон регистрируемых сигналов составляет преимущественно 72 дБ, соответствующий разрядности аналого-цифрового преобразователя 13 - двенадцать, что обусловлено диапазоном значений коэффициентов двойного преобразования УЗП 15 по напряжению и уровнем амплитуд принимаемых эхо-сигналов. Усилители 12 управляются посредством блока 23 обработки команд управления, напряжение с которого подается на их управляющий вход, что позволяет регулировать их коэффициент усиления. Это дает возможность программно задавать необходимое усиление каждому ультразвуковому каналу 11, 21 и управлять временной регулировкой чувствительности. Таким образом, команды управления и настройки, принимаемые блоком 23 обработки команд управления из управляющего процессора 1 через контроллер 24, устанавливают в каждом ультразвуковом канале 11, 21 частоту возбуждения УЗП 15, время мертвой зоны, величину начального и конечного усиления во время приема сигнала и величину уровня порога чувствительности. Контроллер 24 выполняет роль адаптера, обеспечивая согласование магистралей управляющего процессора 1 с блоком 23 обработки команд управления. Для обеспечения полного ультразвукового контроля рельсов с целью выявления всех выявляемых ультразвуковым методом возможных дефектов по всему сечению рельсов количество всех ультразвуковых каналов 11, 21 должно составлять в расчете на каждую нить рельсового пути преимущественно девять. При этом выявляются следующие основные дефекты: поперечные трещины в головке рельса различной ориентации; поперечные дефекты, развивающиеся вниз и вверх от горизонтального расслоения головки; вертикальные расслоения в головке, имеющие выход в подголовочную грань или на поверхность катания; дефекты, расположенные в галтельном переходе поверхности катания в боковую грань, развивающиеся от сетки термических трещин; расслоения и выкрашивания со стороны рабочей и нерабочей грани; расслоения, расположенные в зоне продолжения шейки в головку рельса; имеющие различную ориентацию и различные отражающие свойства поперечные дефекты, расположенные в зоне продолжения шейки в головку рельса или имеющие развитие за ось рельса; трещины в шейке рельса, развивающиеся как от отверстий, так и вне их; расслоения, с выходом на торцевую поверхность рельса в зоне болтовых стыков и др. Первый 16 и второй 17 магнитные каналы принимают и преобразуют сигналы от МД 20. МД 20 фиксируют возмущение магнитного поля по всей поверхности катания головки рельса при перемещении МД 20 вдоль его продольной оси. При этом обеспечивается контроль изломов и сильно развитых дефектов, развивающихся от поверхности рельса или имеющих выход на поверхность рельса в случае проведения контроля способом остаточной намагниченности, а также подповерхностных дефектов в случае проведения контроля способом приложенного поля. Сигналы с МД 20 поступают на вход усилителей 19, где усиливаются, и поступают на вход аналого-цифровых преобразователей 18, имеющих динамический диапазон регистрируемых сигналов преимущественно 144 дБ, соответствующий разрядности двадцать четыре, что позволяет проводить магнитный контроль как способом остаточной намагниченности (низкий уровень амплитуд регистрируемых сигналов), так и способом приложенного поля (высокий уровень амплитуд регистрируемых сигналов). Далее данные с аналого-цифровых преобразователей 18 поступают в блок сбора информации 22, где архивируются, и затем поступают в блок 23 обработки команд управления и через контроллер 24 передаются в управляющий процессор 1. В управляющем процессоре 1 сигналы, инициированные как УЗП 15, так и МД 20, проходят обработку в блоке 5 формирования градиентного порога, где фильтруются по скорости нарастания передних фронтов полученных сигналов, а также по превышению амплитудой эхо-сигналов уровня шумовых сигналов на заданное значение. С блока 5 формирования градиентного порога сигналы с поправками, получаемыми с блока 6 управления параметрами ультразвукового контроля, поступают на блок 7 формирования развертки по амплитуде и блок 8 формирования развертки по пройденному пути. Блок 6 управления параметрами ультразвукового контроля обеспечивает возможность более точной идентификации параметров выявленных дефектов, при этом фиксируются время задержки в УЗП 15, угол ввода, параметры временной регулировки чувствительности, параметры чувствительности в начале и конце зоны временной селекции (для сигналов от МД 20 этого не требуется). После этого посредством блока 9 вывода данных, в котором формируется графическое отображение полученных сигналов, сигналы выводятся на индикаторный узел - дисплей 10. Посредством блока 4 ввода и корректировки данных могут устанавливаться и регулироваться в ручном режиме основные параметры дефектоскопа в ультразвуковых каналах 11,21. При этом связь блока 4 ввода и корректировки данных с усилителями 12 и генераторами 14 зондирующих импульсов не непосредственно, а через контроллер 24 и блок 23 обработки команд управления, позволяет не только обеспечить первичную установку параметров ультразвукового контроля, а и изменять ее в автоматизированном режиме с учетом получаемой информации в процессе контроля. Управление ультразвуковыми каналами 11, 21 посредством блока 23 обработки команд управления с контроллером 24 и блоком 22 сбора информации позволяет программно задавать необходимые параметры по каждому ультразвуковому каналу 11, 21 и управлять ими соответствующими командами управляющего процессора 1 в процессе контроля. В свою очередь, передача в управляющий процессор 1 получаемой с УЗП 15 по всем ультразвуковым каналам 11, 21 и с МД 20 по магнитным каналам 16, 17 пакета информации обо всех основных дефектах рельсов, через блок 22 сбора информации, блок 23 обработки команд управления и контроллер 24 позволяет оптимизировать выработку соответствующих команд управления управляющего процессора 1 и повысить эффективность выявления дефектов различного вида. Это повышает адаптацию дефектоскопа к различным видам дефектов и точность контроля при работе дефектоскопа в многоканальном режиме, обеспечивая достоверную и объективную, максимально приближенную к реальной, картину состояния обеих нитей рельсового пути за один проезд. Все это в целом обеспечивает высокую эффективность дефектоскопа при выявлении дефектов в рельсах. Таким образом, выполнение дефектоскопа для контроля рельсов в соответствии с описанной выше структурой, повышает его эксплуатационную эффективность.
Пример реализации. АО «Фирма ТВЕМА» (г.Москва) разработан и испытан дефектоскоп для контроля рельсов «ЭХО-КОМПЛЕКС-2», выполненный в соответствии с изобретением. Дефектоскоп предназначен для выявления в рельсах типов Р50, Р65, Р75 комплекса дефектов, предусмотренных Инструкцией «Дефекты рельсов. Классификация, каталог и параметры дефектных и остродефектных рельсов», утвержденных распоряжением ОАО «РЖД» от 23.10.2014 №2499р. Количество ультразвуковых каналов 11. 21 составляет восемнадцать, количество магнитных каналов 16, 17 - два. Частота следования импульсов генераторов зондирующих импульсов 14 ультразвуковых каналов 11, 21 - от 100 до 4800 Гц, динамический диапазон регистрации сигналов ультразвуковых каналов 11, 21 - не менее 48 дБ. Измеряемое значение амплитуды сигнала на входе магнитных каналов 16, 17 - не менее 2,3 В. Обеспечиваются погрешность измерения амплитуд эхо-сигналов на входе ультразвуковых каналов 11, 21 - не более ±1 дБ, погрешность измерения амплитуды сигнала на входе магнитных каналов 16, 17 - не более ±0,2 В. Дефектоскоп в составе вагона-дефектоскопа «СПРИНТЕР» прошел апробацию на ряде железных дорогах Российской Федерации (Свердловской, Юго-восточной, Красноярской и др.) и показал свою высокую эксплуатационную эффективность. Во всех случая дефектоскоп выделял в качестве полезных исключительно сигналы от дефектов в рельсах и конструктивных отражателей, позволяя регистрировать наличие дефектов всех основных видов и определять их величину и распределение по всему объему нитей рельсового пути за один проезд. По результатам испытаний дефектоскоп «ЭХО-КОМПЛЕКС-2» допущен для обслуживания железнодорожной инфраструктуры и метрополитена в Российской Федерации.
Дефектоскоп для контроля рельсов, выполненный в соответствии с изобретением, обладает более высокой эксплуатационной эффективностью по сравнению с известными аналогичными, в том числе за счет повышения достоверности и объективности контроля, а также повышения производительности, позволяя надежно и с высокой точностью за один проезд выявлять в многоканальном режиме в обеих рельсовых нитях по всему их сечению все виды дефектов, влияющих на безопасность эксплуатации подвижного состава железных дорог и метрополитена.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП "ЛАСТОЧКА" | 2001 |
|
RU2231783C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2011 |
|
RU2472143C1 |
| ЦИФРОВОЙ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП "АВГУР" | 1994 |
|
RU2130610C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2270998C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2024 |
|
RU2834598C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2017 |
|
RU2662464C1 |
| Устройство для ультразвукового контроля металлических изделий при нагреве | 1990 |
|
SU1739191A1 |
| УСТРОЙСТВО ВОЗБУЖДЕНИЯ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2363550C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В РЕЛЬСАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2723146C1 |
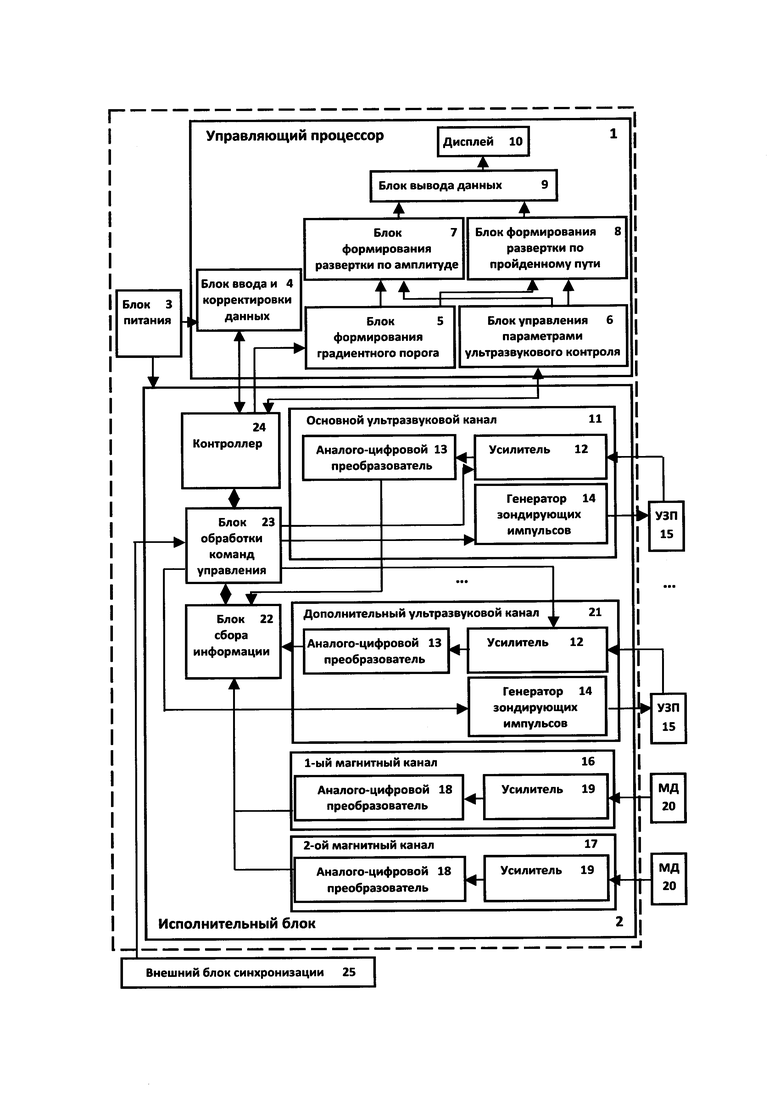
Использование: для дефектоскопии рельсов. Сущность изобретения заключается в том, что дефектоскоп содержит связанные между собой управляющий процессор (1) и исполнительный блок (2) и соединенный с ними блок питания (3). Управляющий процессор (1) включает блок (4) ввода и корректировки данных и связанные между собой блок (5) формирования градиентного порога, блок (6) управления параметрами ультразвукового контроля, блок (7) формирования развертки по амплитуде, блок (8) развертки по пройденному пути, блок (9) вывода данных и дисплей (10). Исполнительный блок (2) включает основной (11) и выполненные аналогично основному дополнительные (21) ультразвуковые каналы, количество которых выбрано из условия обеспечения возможности полного ультразвукового контроля рельсов по всему их сечению, и два магнитных канала (16), (17). Каждый ультразвуковой канал (11), (21) содержит аналого-цифровой преобразователь (13), а также усилитель (12) и генератор зондирующих импульсов (14), к которым предусмотрено подключение ультразвуковых преобразователей (15). Каждый магнитный канал (16), (17) содержит аналого-цифровой преобразователь (18) и усилитель (19), к которому предусмотрено подключение магнитных датчиков (20). Исполнительный блок (2) содержит также последовательно соединенные блок (22) сбора информации и блок (23) обработки команд управления, связанные с соответствующими электронными блоками (12), (13), (14) (18), (19) всех каналов (11), (21), (16), (17), и контроллер (24), связанный с блоком (4) ввода и корректировки данных, блоком (5) формирования градиентного порога и блоком (6) управления параметрами ультразвукового контроля. К блоку (23) обработки команд управления предусмотрено подключение внешнего синхронизатора (25). Технический результат: повышение объективности, достоверности и производительности контроля и в целом повышение его эксплуатационной эффективности. 2 з.п. ф-лы, 1 ил.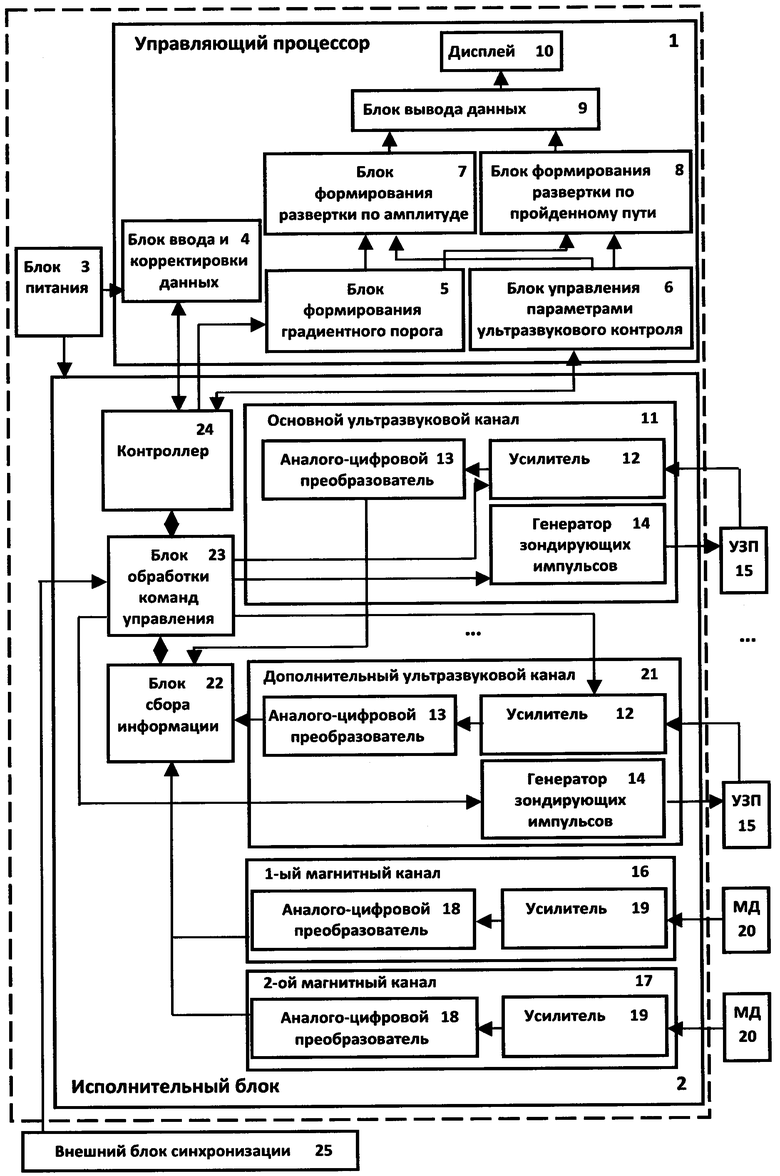
1. Дефектоскоп для контроля рельсов, содержащий связанные между собой управляющий процессор и исполнительный блок и соединенный с ними блок питания, при этом управляющий процессор включает блок ввода и корректировки данных и связанные между собой блок формирования градиентного порога, блок управления параметрами ультразвукового контроля, блок формирования развертки по амплитуде, блок формирования развертки по пройденному пути, блок вывода данных и дисплей, а исполнительный блок включает основной ультразвуковой канал, состоящий из усилителя, выполненного с обеспечением возможности его подключения к выходу ультразвукового преобразователя, соединенного с ним аналого-цифрового преобразователя и генератора зондирующих импульсов, выполненного с обеспечением возможности его подключения к входу ультразвукового преобразователя, отличающийся тем, что в исполнительный блок введены два магнитных канала, каждый из которых состоит из аналого-цифрового преобразователя и соединенного с ним усилителя, выполненного с обеспечением возможности подключения к нему магнитного датчика, выполненные аналогично основному дополнительные ультразвуковые каналы, количество которых выбрано из условия обеспечения возможности полного ультразвукового контроля рельсов по всему их сечению, и последовательно соединенные блок сбора информации, блок обработки команд управления, связанные со всеми ультразвуковыми и магнитными каналами, и контроллер, связанный с блоком ввода и корректировки данных, блоком формирования градиентного порога и блоком управления параметрами ультразвукового контроля, при этом выход каждого из аналого-цифровых преобразователей подключен к соответствующему входу блока сбора информации, а управляющий вход каждого из усилителей и генераторов зондирующих импульсов подключен к соответствующему выходу блока обработки команд управления.
2. Дефектоскоп по п. 1, отличающийся тем, что количество дополнительных ультразвуковых каналов составляет семнадцать.
3. Дефектоскоп по п. 1, отличающийся тем, что блок обработки команд управления выполнен с обеспечением возможности его подключения к внешнему блоку синхронизации.
| ДВУХСТОРОННИЙ ПЕРЕПУСКНОЙ КЛАПАН | 0 |
|
SU180038A1 |
| Заземлённая вещательная антенна-мачта | 1941 |
|
SU62708A1 |
| Ультразвуковой дефектоскоп | 1981 |
|
SU1010516A1 |
| Ультразвуковой дефектоскоп | 1988 |
|
SU1566283A1 |
| JP 2003294715 A, 15.10.2003 | |||
| JP 2006132987 A, 25.05.2006. | |||

