Изобретение относится к области электрического транспорта, в частности к способам и устройствам регулирования скорости электроподвижного состава с импульсным регулированием.
Известен способ регулирования скорости тяговых двигателей, при котором шунтируют резисторами их обмотки возбуждения (см. Б.П.Петров, А.Д.Степанов. Электрическое оборудование и автоматизация электрического подвижного состава, изд. 2-е перераб, и доп., М. - Л., Госэнергоиздат, 1963, 304 С. на с 50-51).
При этом способе регулирования в начале переходного процесса происходит резкое увеличение тока в цепи якоря двигателя, что приводит к толчкам силы тяги и может вызвать нарушение коммутации тяговых двигателей.
Наиболее близким к предлагаемому техническому решению является способ регулирования скорости тяговых двигателей, при котором шунтируют обмотки возбуждения тяговых двигателей резисторами, причем последовательно с шунтирующим резистором включают индуктивный шунт (см. Б.А.Тихменев, Л.М.Трахтман. Подвижной состав электрифицированных железных дорог. Теория работы электрооборудования. Электрические схемы и аппараты, М.; Транспорт, 1980. - 471С. на с.135-136).
Этот способ регулирования, хотя и улучшает переходные процессы при ослаблении поля, предполагает наличие индуктивного шунта, масса и габариты которого тем больше, чем лучше качество переходных процессов.
Задачей изобретения является уменьшение толчков силы тяги и снижение массогабаритных показателей регулировочного оборудования электровоза.
Поставленная задача решается тем, что в известном способе регулирования скорости тяговых двигателей электровоза постоянного тока, при котором обмотки возбуждения тяговых двигателей шунтируют резисторами, последовательно с каждым тяговым двигателем или группой последовательно включенных тяговых двигателей включают импульсный преобразователь и увеличивают коэффициент заполнения преобразователя до значения, равного единице. Затем измеряют ток якоря тяговых двигателей, по зависимости момента тягового двигателя от тока якоря и значению коэффициента ослабления поля, равного отношению величин тока возбуждения и тока якоря, определяют значение момента тягового двигателя, по этому значению момента и зависимости момента тягового двигателя от тока якоря для нового значения коэффициента ослабления поля определяют значение тока якоря, вычисляют значение тока возбуждения тягового двигателя после шунтировки, умножая полученное значение тока якоря на новое значение коэффициента ослабления поля, по значению тока возбуждения и кривой намагничивания двигателя определяют значение его магнитного потока, вводят значение скорости вращения двигателя ω, вычисляют значение эдс двигателя по формуле
Е=сФω,
где Е - эдс двигателя;
Ф - магнитный поток двигателя;
ω - частота вращения двигателя,
вычисляют новое значение коэффициента заполнения импульсного преобразователя по формуле
где rЯ IЯ и rВ, IВ - сопротивления и токи якоря и возбуждения соответственно;
U - напряжение на якоре двигателя,
шунтируют обмотки возбуждения тяговых двигателей резисторами и подают импульсы управления на импульсные преобразователи, обеспечивая новое значение коэффициента заполнения импульсных преобразователей γn+1.
Данный способ регулирования скорости тяговых двигателей позволяет увеличивать скорость тяговых двигателей без толчков силы тяги, т.к. момент тяговых двигателей при ослаблении поля остается постоянным, что обеспечивается новым значением γn+1 коэффициента заполнения импульсного преобразователя.
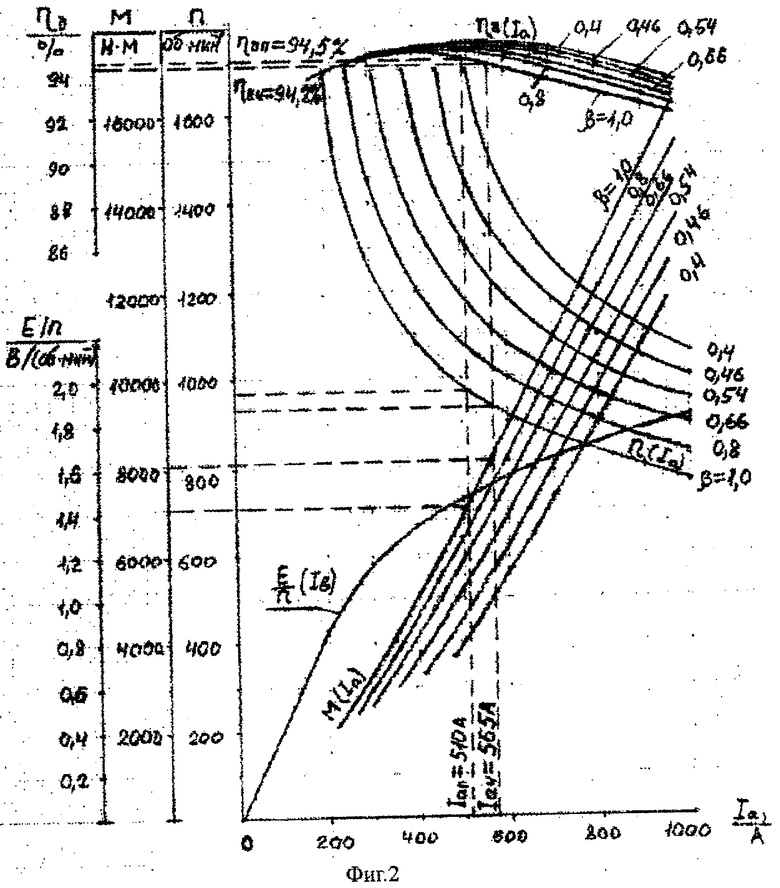
На фиг.1 представлен алгоритм реализации способа регулирования, на фиг.2 - электромеханические характеристики тягового двигателя постоянного тока ДТК-800К.
Способ может быть осуществлен микроЭВМ в составе стандартных блоков (процессора, ОЗУ, ПЗУ, АЦП, портов ввода-вывода дискретных сигналов), например, контроллером M167-1С (см. каталог продукции "Бортовая промышленная электроника" АО "Каскад", 105037 Москва, Измайловская пл.7).
При поступлении команды на ослабление магнитного потока двигателей контроллер работает в соответствии с алгоритмом на фиг.1: увеличивают ширину импульсов управления импульсными преобразователями, доводя коэффициент заполнения у импульсных преобразователей до значения 1 (блоки 2, 3). Затем вводят значение тока якоря двигателей IЯn (блок 4), определяют по электромеханическим характеристикам (фиг.2) для текущих значений коэффициента ослабления поля βn и тока якоря IЯn значение момента двигателя (блок 5), по значению момента и зависимости М (IЯn) для нового значения коэффициента ослабления поля βn+1 определяют необходимое для создания того же момента значение тока якоря IЯn+1 (блок 6), вычисляют новое значение тока возбуждения IВn+1=βn+1 IЯn+1 (блок 7). По кривой намагничивания двигателя и значению тока возбуждения определяют значение магнитного потока двигателя Ф (блока 8), вводят значение скорости вращения двигателя ω (блок 9), вычисляют значение эдс двигателя (блок 10) и новое значение коэффициента заполнения импульсных преобразователей γn+1. Затем включают контактор ослабления поля (блок 12) и реализуют вычисленный коэффициент заполнения импульсных преобразователей γn+1 (блок 13).
В качестве примера приводится определение коэффициента заполнения импульсных преобразователей после ослабления поля для электровоза постоянного тока с двигателями ДТК-800К.
Ослабление поля происходит при переходе с работы на естественной характеристике двигателя с полным полем (β=1) на характеристику, соответствующую первой позиции ослабления поля с β=0,8.
Напряжение на двигателе U=1500 В; ток якоря IЯn=565 А; скорость вращения n=945 об/мин.
Сопротивления обмотки якоря rЯ=0,0774 Ом, обмотки возбуждения rB=0,0226 Ом.
При β=1, IЯn=565 А определяем по характеристике М (IЯ) момент двигателя М=8086 Нм. По этому значению момента для β=0,8 определяют новое значение тока якоря IЯn+1=600 А и новое значение тока возбуждения IBn+1=0,8×600=480 А. Для тока возбуждения 480 А по характеристике  находят E=1,44; Е=1,44n=1,44×945=1361 В.
находят E=1,44; Е=1,44n=1,44×945=1361 В.
Тогда 
Регулирование скорости по предлагаемому способу позволяет осуществлять регулирование без толчков силы тяги и без применения индуктивных шунтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕГРУППИРОВКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА С ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ И СХЕМА ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2283245C2 |
| СПОСОБ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ТЯГОВЫХ ДВИГАТЕЛЯХ ЭЛЕКТРОВОЗА ПОСТОЯННОГО ТОКА И СХЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2288851C2 |
| Устройство для регулирования скорости тяговых двигателей постоянного тока с последовательным возбуждением | 1978 |
|
SU893620A1 |
| Устройство для регулирования скорости тягового двигателя постоянного тока | 1981 |
|
SU970612A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1972 |
|
SU422644A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ТОКА ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ | 1999 |
|
RU2155436C1 |
| Устройство для регулирования скорости тягового электродвигателя | 2018 |
|
RU2673567C1 |
| СПОСОБ УВЕЛИЧЕНИЯ КОЭФФИЦИЕНТА МОЩНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2464697C2 |
| ДВУХДВИГАТЕЛЬНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2332316C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1996 |
|
RU2109388C1 |
Изобретение относится к области электрического транспорта и может быть использовано для регулирования скорости электроподвижного состава. регулированием. Техническим результатом является уменьшение толчков силы тяги и снижение массогабаритных показателей регулировочного оборудования электровоза. В способе регулирования скорости последовательно с каждым тяговым двигателем или группой последовательно включенных тяговых двигателей включают импульсный преобразователь и увеличивают коэффициент заполнения преобразователя до значения, равного единице. Измеряют ток якоря тяговых двигателей, определяют значение момента тягового двигателя. Для нового значения коэффициента ослабления поля определяют значение тока якоря, вычисляют значение тока возбуждения тягового двигателя после шунтировки. Умножая полученное значение тока якоря на новое значение коэффициента ослабления поля, по значению тока возбуждения и кривой намагничивания двигателя определяют значение его магнитного потока. Вводят значение скорости вращения двигателя ω, вычисляют значение эдс двигателя, вычисляют новое значение коэффициента заполнения импульсного преобразователя по соответствующей формуле. Шунтируют обмотки возбуждения тяговых двигателей резисторами и подают импульсы управления на импульсные преобразователи, обеспечивая новое значение коэффициента заполнения импульсных преобразователей. 2 ил.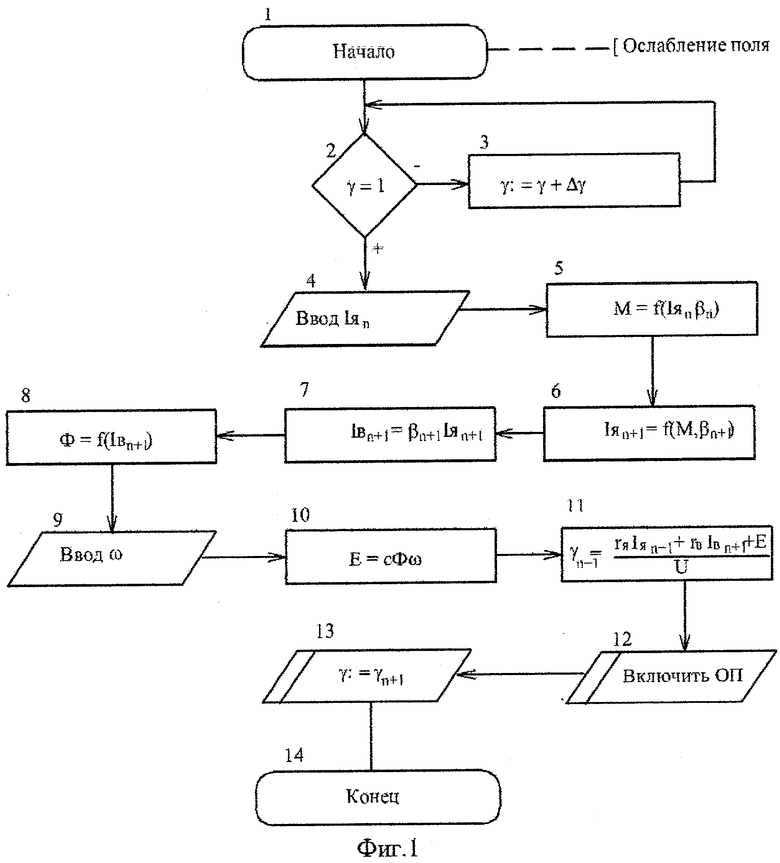
Способ регулирования скорости тяговых двигателей электровоза постоянного тока с импульсным регулированием, заключающийся в том, что обмотки возбуждения тяговых двигателей шунтируют резисторами, отличающийся тем, что последовательно с каждым тяговым двигателем или группой последовательно включенных двигателей включают импульсный преобразователь, увеличивают коэффициент заполнения преобразователя

где t - время проводящего состояния импульсного преобразователя;
Т - период преобразования,
при значении у=1, измеряют ток якоря тяговых двигателей, по зависимости момента тягового двигателя от тока якоря и значению коэффициента ослабления поля, равного отношению величин тока возбуждения и тока якоря, определяют значение момента тягового двигателя, по этому значению момента и зависимости момента тягового двигателя от тока якоря для нового значения коэффициента ослабления поля определяют значение тока якоря, определяют значение тока возбуждения тягового двигателя после шунтировки, умножая полученное значение тока якоря на новое значение коэффициента ослабления поля, по значению тока возбуждения и кривой намагничивания двигателя определяют значение его магнитного потока, вводят значение скорости вращения двигателя ω, определяют значение эдс двигателя по формуле
Е=сФω,
где Е - эдс двигателя;
Ф - магнитный поток двигателя;
ω - частота вращения двигателя,
определяют новое значение коэффициента заполнения импульсного преобразователя по формуле
где rЯ, IЯ и rB, IB - сопротивления и токи якоря и возбуждения соответственно;
U - напряжение на якоре двигателя, шунтируют обмотки возбуждения тяговых двигателей резисторами и подают импульсы управления на импульсные преобразователи, обеспечивая новое значение коэффициента заполнения импульсных преобразователей γn+1.
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2129495C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2168258C1 |
| Электропривод транспортного средства | 1984 |
|
SU1207837A1 |
| Электропривод постоянного тока | 1987 |
|
SU1413697A1 |
| СПОСОБ ДЕГЕЛЬМИНТИЗАЦИИ ОСАДКОВ СТОЧНЫХ ВОД | 1997 |
|
RU2120421C1 |
| US 4792736 A, 20.12.1988 | |||
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| СПОСОБ ПРОИЗВОДСТВА НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2011 |
|
RU2437597C1 |
| Механизм для передачи поворотных движений между двумя валами | 1926 |
|
SU7510A1 |

