Зык 2 д 2 Sx
(Л
ди /
00
со ел О) СП
д/,1х 3
Изобретение относится к робототехнике, в частности к захватным устройствам, и может быть использовано в очувствленных роботах.
Целью изобретения является расширение функциональных возможностей устройства.
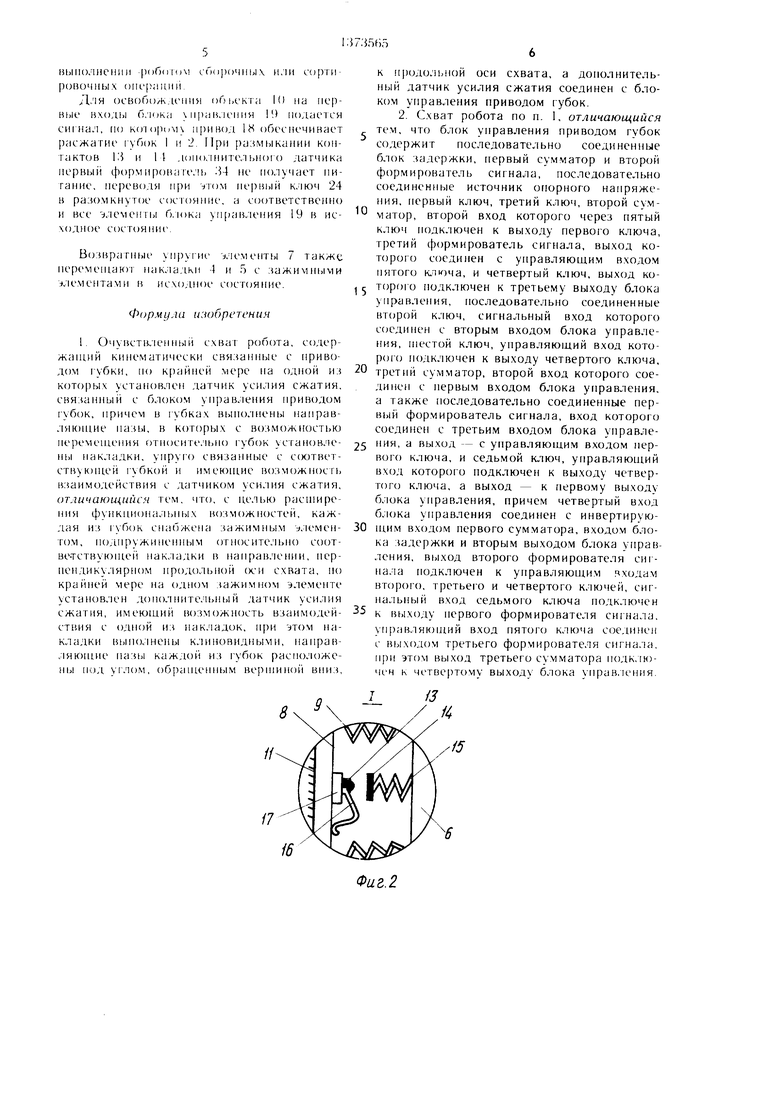
На фиг. 1 приведена схе.ма схвата (вид спереди) с блоком управления приводом губок; на фиг. 2 - узел 1 на фиг. дополнительного сжатия датчика; на фиг. 3 - схема схвата, вид сверху.
В 1 бках 1 и 2 (фиг. 1) очувствленного схвата робота выполнены направляющие пазы 3, в которых с возможностью пере- мепшния относительно губок 1 и 2 установлены накладки 4 и 5, снабженные направляющими выступами 6, размещенными в пазах 3 Накладки 4 и 5 выполнены к тино- видиыми, а поверхности с направляющими пазами 3 губок 1 и 2 расположены по отношению к продольной оси MN схвата под УГЛОМ, соответствующим углу скоса клиновидных накладок 4 и 5. Накладки 4 и 5 кроме соединения выступ-наз связаны с соот- iieicTByionieti убкой 1 или 2 с помощью упругих элементов 7, размещенных в пазах 3. Каждая губка снабжена зажимным элемен- 1()м 8, подпружиненным относительно соответствующей накладки 4 и 5 посредством у||)угих элементов 9. Поверхность каждо1 о зажимного э;1емента 8, контактирующая с оп|,ект()м 1(1, покрыта упругим ластичным шероховатым материа. юм 11, например резиной, (хват снабжен датчико.м 12 усилия сжатия, регистрирующим перемеи1ение п(JДBижныx частей губки (накладки 5) при наращивании сжимающего усилия схвата. Датчик 12 усилия сжатия может быть выполнен, например, потенпиометрическим, емкостным или индуктивным. Дополнительный датчик уси,тия сжатия расиоложен меж- . зажимным -: лементом 8 и накладкой 4 и состоит (фиг. 2) из двух электропроводящих контактов (нластин) 13 и 14. Контакт 14 подпружинен относительно накладки 4 посредством упругого элемента 15, а кон- га кт 13 закреплен на упруго.м элементе 16, жестко связанном с зажимным элементом 8 таким образом, что между поверхностями контактов 13 и 14 имеется интервал.
контактом 13 и зажимным элементом 8 расположена диэлектрическая прокладка 17.
Привод 18 губок I и 2 очувствленного схката связан (фиг. 1) с блоком 19 управления приводом, к которому также подключены доиолнительный датчик и датчик 12 усилия сжатия. В состав блока 19 управления приводом 18 входят последовательно соедипенные блок задержки 20, первый сумматор 21 и второй формирователь сигнала 22, пос;1едовательно соединенные источник
5
опорного напряжения 23, первый ключ 24, третий ключ 25, второй сумматор 26, второй вход которого через пятый ключ 27 под- ютючен к выходу .первого ключа 24, третий
формирователь сигнала 28, выход которого соединен с управляющим входом пятого ключа 27, и четвертый ключ 29, выход которого подключен к третьему выходу блока управления 19. Кроме того, блок 19 содерQ жит последовательно соединенные второй ключ 30, сигнальный вход которого соединен со вторым входом блока управления 19, щестой ключ 31, управляющий вход которо го подключен к выходу четвертого ключа 29, седьмой ключ 32, третий сумматор 33, второй вход которого соединен с первым входом блока управления 19, а также последо- вате:1ьно соединенные формирователь сигнала 34, вход которого через дополнительный датчик (контакты 13 и 14) соединен с
0 выходо.м источника напряжения 35, а выход с управляющим входом первого ключа 24, управляющий вход седьмого ключа 32 подключен к выходу четвертого ключа 29, а выход - к первому выходу блока управления 19. Выход датчика 12 усилия соединен с инвертирующим входом первого сумматора 21, входом блока задержки 20 и вторым выходом блока управления 19, а выход второго формирователя сигнала 22 подключен к управляющим входам второго 30, тре0 тьего 25 и четвертого 29 ключей.
С губками 1 И 2 кинематически связан толкатель 36 (фиг. 3), размещенный в корпусе 37 очувствленного схвата. В свою очередь толкатель 36 также связан с приводом 18 (кинематическая связь толкателя с при5 водом на фиг. 1 и 3 не показана).
Схват очувствленного робота работает следуюп1им образом.
В исходном состоянии (перед захватом объекта 10) первый 24, третий 25 и пятый
Q 27 ключи разомкнуты, а второй 30, четвертый 29, щестой 31 и седьмой 32 ключи замкнуты. При подаче командного сигнала на второй вход блока управления 19, соответствующего команде «захват-объекта, привод 18 через замкнутые ключи 30 и 31 полу5 чает питание и создает момент, который через кинематические связи вызывает перемещение губок 1 и 2 навстречу друг другу для захвата объекта 10. При контакте зажимных элементов 8 с деталью 10 и дальнейшей работе привода 18 наращивается сжимающее усилие (упругие элементы 9 фн этом сжимаются) до минимального (заранее заданного) значения, величина которого определяется величиной интервала между контактными поверхностями кон5 тактов 13 и 14.
При необходимости интервал можно изменять путем изменения толщины диэлектрической прокладки 17. В момент срабаты0
вания до1.олнительного датчика выходной сигнал UBSH источника напряжения 35 подается на нход первого формирователя сигнала 34 с характеристикой
О
и. 3- О
при
1
UBX 34 и,
Появление на выходе первого формирователя 34 сигнала приводит к замыканию первого ключа 24, а также к появлению на первом выходе блока управления 19 командного сигнала на выполнение пробного движения схвата вверх. Одновременно продолжается наращивание сжимающего усилия губок I и 2 с помощью привода 18. Когда силы трения, возникающие между покрытиями II. зажимных элементов и объектом 10, превыщает противодействующую силу упругих элементов 7, происходит смещение накладок 4 и 5 вместе с зажимными элементами 8 относительно губок 1 и 2 Это приводит к изменению сигнала на выходе датчика усилия 12. Выходной сигнал датчика 12 U(t) подается одновременно на вход блока задержки 20, на выходе которого в процессе захвата объекта 10 формируется сигнал U(t -f), где f время задержки, и на инвертирующий вход первого сумматора 21. На прямой вход первого сум матора 21 при этом поступает сигнал и(1-Г). При изменении сигнала U(t) на выходе первого сумматора 21 появляется сигнал
AU(t) U()-U(t). При эт(;м срабатывает второй формирова- Te. ib 22 с характеристикой
ГоAU(t) О
зых 22 1 , при
L1AU(t) О ,
размыкая второй 30 и четвертый 29 к-чючи и замыкая третий 25 ключ.
При этом отключается питание от привода 18, а выходной сигнал источника опорного напряжения поступает на вход третьего формирователя сигнала 28 с характеристикой
О
UBX 28 О
Vix 28 1 , при
I, 28 .
Формирователь 28 при этом замыкает пятый ключ 27.
Таким образом, в момент работы датчика 12 усилия сжатия при возникновении смещения губок 1 и 2 относительно накладок 4 и 5 прекраи1ается сжатие губок 1 и 2, так как привод 18 отключается, а обеспечивается лищь движение схвата вверх (путем
управления рукой робота При эгом иьиш, нение накладок 4 и 5 K. iniKi Mi.uibiMH. ;i :-, I K i 1 и 2 скощенными П|1инод111 к . 410 и« мере под ьема схвата IKIK.I.-I.IKH 1 и Г г- 5 щаются вниз (. 1| опюси :г ми чГи,. 1 и 2 схвата, сжимая :|iii -ном . , к менты 9. а следователыю, iiap,iiuiiH;i ,i .i мающее уси:пк . Эю происхс.) м:: ;:; и .ii|i. пока сжимающее ycn,uie за/кимныч ,,:( i. :.
Q тов 8 не обеспечит удержание и ио.чыл ,ia хваченного объекта 10. Велич1 на сжимаю щего усилия формируется в зашн имоии oi веса объекта 10.
Когда осуществ. км «самозажим обьск та, прекращается перемещении накладок
4 и 5 в пазах-3 г убок 1 и 2, а на ря.гхидс датчика усилия сжатия 12. как и на нтпром выходе блока управления 19, формируются сигналы, соответствующие величине ежи мающего усилия или весу объекта 10.
0 Поскольку сигнал датчика 12 уси.пш сжатия не изменяется, TCJ на выходе первого сумматора 21 устанавливается сигпа. нулевого уровня, а следовательно, на выходе второго формирователя сигна,1а 22 по
является сигнал I, ew)i22 0. Это одпов1н - менно приводит к размыканию третьею ключа 25, однако работа блока управления 19 не нарущается. так как третий к. 1юч 2о П1унтирован пятым ключом 27, находящим ся в замкнутом состоянии; замыкащ .н niu
0 рого ключа 30, однако привод 18 щ- n(i. чает питание, так как одновременно с лл мыканием второю к.аюча 30 ;1а.шык,1Ч я П1естой ключ 31 (см. следукицш пхпм), за.мыканию четвертого 29 и В1,::ч(|;;,1лМ1 сигнал USM 28 при VTOM ра,чм1,1киет пичтил
5 31 и седьмой 32 ключи. В |)c.i.ii,iaic IM нервом выходе блока упраи.ления усгаиав ливается сигна.ч нулевого уровня. щающий пробное движение (.-хиата iuu p ч свидетельств юпп1Й о со.ьч.пщи очунп iii
. ным схватом требуемого ежим аюйичо v-ii
ЛИЯ.
В то же время на третьем ni-ixdjc n.o -..i управления 19 появляется ciirna.i I 1. представляющий собой команд и, иым нение работы роботом 3an.iaHH|i()ii:inHbi .
5 нипуляционных onepaiuiii i. иП1,г-,;ц,м Id
Если в процессе ныно.шгиии , ционных операций с оГ),ек1о.1 10 пк И .ч увеличивается (емкость, и Kmiiini i .и. ; вается жидкость и. Щ добаи.шгк я материал), то очувс 1 H.ieHHi,iii ,
0 тая автоматически, без каких .ии м) niir:ii:iii команд обеспечивает на)ащииание t.-kiiM.H niero усилия до требуемой пели-:; |;ы : i:,: втором выходе блока упраи.кми я IM iij этом формируется сигна. к с iioN ti:ui,Ki кч:1
5 рого можно ОЦСИИТ1, иее обьек . ii- л. м i сигнал можно исполыонап, ипи- иеф кации (распознавания) опьеккш lu, (ii,;i чающихся по весу, что вееьма : :1/кнп :i|i i
fU)iii().i)iCHiiii )()б(}т)1 сП(1)оч11ы или еорти- рслючиых ()iie);iiiHH.
Л, 1Я ()св()Г)1)/к.кчи1я ,fKT;i К) на первые в() б. юка ирав.1е1П1я 19 подается сигнал, но ко1о|1(А1 привод 18 обеспечивает )асжатие lyHoK I и 2. При )азмыкаиии контактов 1:5 и 11 допо,1нителbuoio датчика первый формироваге.чь 34 не получает питание, переводя при 11е)вый ключ 24 в разомкнутое состояние, а соответственно и все :)лементы б.юка управления 19 в исходное состояние-.
Возврагп1)1е упругие элементы 7 также неремеп1ак)т накладки 4 и 5 с зажимными : лементами в исходное состояние.
Формула изобретения
1. Очувств,ленны11 схват робота, содер- жаниш кинематически связанные с приводом губки, но крайней мере на одной из которых установлен датчик усилия сжатия, связанный с блоком унравления приводом губок, причем в губках вьнюлнены направляющие пазы, в которых с возможностью перемещения относите,чьно губок установлены накладки, унругч) связанные с ссютвет- ствующей 1 убкой н имеющие возможносгь взаимодействия с датчиком усилия сжатия, отличающийся тем, что, с целью pacuiHpe- пия функниональных возможпск тей, каждая из |убок спабжепа зажимным Ъ1лемен- том, ноднружинепным относительно соот- ве-тствуюпам накладки в нанравлении, иер- пендику. 1ярном продольной (К и схвата, но крайней мере на одном зажимном элементе установлен дополните.ьный датчик усилия сжатия, имеющий 1И)Зможность взаимодействия с одной из нак.чадок, при этом накладки вьнюлнены клиновидными, нанрав- ;1яю1ние пазы каждой из губок распо.чоже- ны пид углом, ()б{)ап;енным верп1иной вниз.
0
0
5
0
5
к н)одольнои оси схвата, а дополнительный датчик усилия сжатия соединен с блоком управления приводом губок.
2. Схват робота но п. 1, отличающийся тем, что блок управления приводом губок содержит носледовательно соединенные блок задержки, первый сумматор и второй формирователь сигнала, последовательно соединенные источник опорного напряжения, первый ключ, третий ключ, второй сумматор, второй вход которого через пятый ключ иодключен к выходу первого ключа, третий формирователь сигнала, выход которого соединен с управляющим входом пятого ключа, и четвертый ключ, выход которого подключен к третьему выходу блока управлепия, последовательно соединенные второй ключ, сигнальный вход которого соединен с вторым входом блока управления, Н1естой ключ, управляющий вход которого подключен к выходу четвертого ключа, трет пи сумматор, второй вход которого соединен с нервьгм входом блока управления, а также юследовательно соединенные первый формирователь сигнала, вход которог о соединен с третьим входом блока управления, а выход - с управляющим входом первого ключа, и седьмой ключ, управляющий вход которого подключен к выходу четвертого ключа, а выход - к первому выходу блока управления, причем четвертый вход блока управления соединен с инвертирую- П1им вход(м первого сумматора, входом блока задержки и вторым выходом б. юка управления, выход второго формирователя сигнала подключен к управляюпхим входам второго, третьег о и четвертого ключей, снг- на.мьный вход седьмого ключа подключен к выходу первого формирователя сигнала, уп)авляюп1ий вход пятого ключа соединен с выходом третьего формирователя сигнала, при этом выход третьего сумматора подк,1Н)- чеч к четвертому выходу блока управ,чения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1988 |
|
SU1541556A2 |
| Очувствленный схват промышленного робота | 1983 |
|
SU1104017A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Очувствленный схват промышленного робота | 1984 |
|
SU1180263A1 |
| Устройство для управления адаптивным роботом | 1984 |
|
SU1188700A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
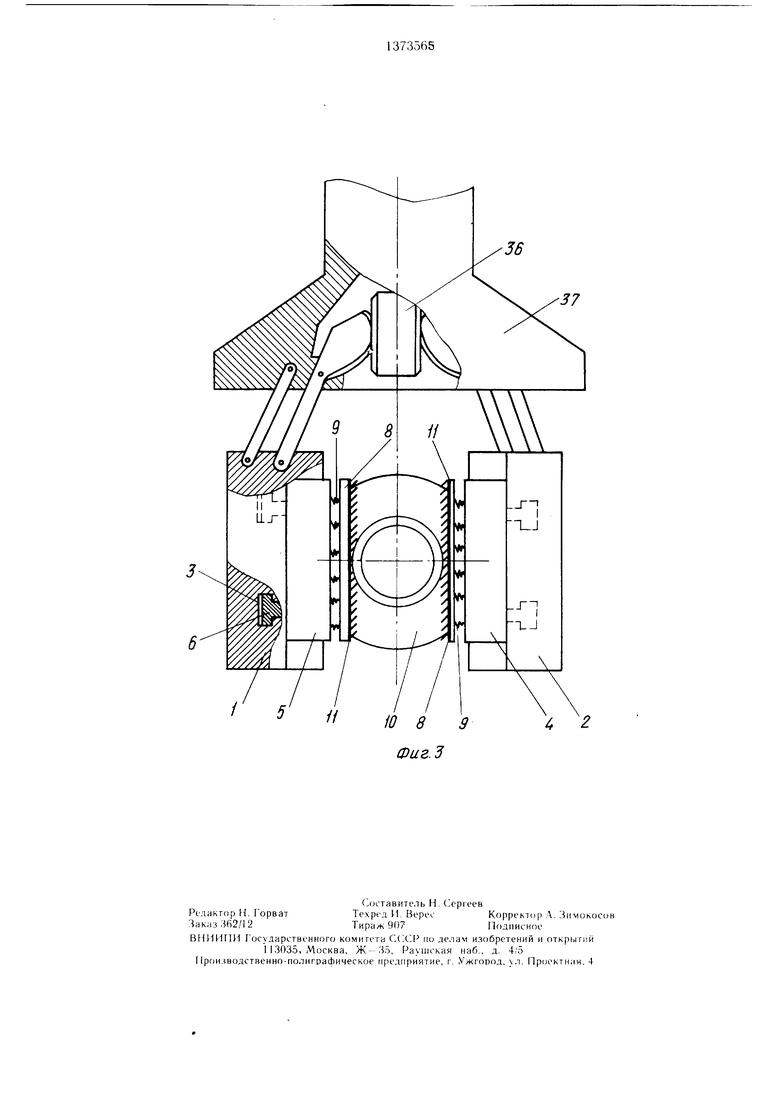
Изобретение относится к области ро- бототе.хники н может быть использовано в очувствленных роботах. Целью изобретения является расширение функциональных возможностей с.хвата робота. Для этого в схвате установлены клиновидные накладки 4 и 5 с подпружиненными зажимными эле- .ментами 8. Накладки 4,5 имеют возможность перемещения по направляющим пазам 3 в скошенной поверхности губок 1 и 2 схва- та, причем накладки 4 и 5 связаны с датчиком 12 усилия сжатия и дополнительным датчиком, выполненным в виде подпружиненных электропроводящих контактов со сменной диэлектрической прокладкой. Датчики связаны с блоком 19 управления приводом 18 губок 1,2 схвата, обеспечивающим зажим детали с минимальным усилием и последующий ее самозажим клиновидными накладками 4 и 5. Блок 19 управления дает также информацию о массе объекта манипулирования 10. 1 з.п. ф-лы, 3 ил. 
f6
Ь
Фиг. 2
5 //
37
iO 8 9 Фиг.З
| Захват очуствленного манипулятора | 1978 |
|
SU709357A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
