Предлагаемое устройство относится к области машиностроения, роботостроения и может быть использовано в исполнительных пневматических механизмах, в том числе в модулях, выполняющих взятие и установку деталей на рабочую поверхность.
Известны пневматические приводы одностороннего действия (см. патент России №2256549 «Захватная головка», Сысоев С.Н., Жиров М.Ю.), в которых пневмодвигателем вертикального перемещения рабочего органа является силовой пневмоцилиндр одностороннего действия. Недостатком данных устройств является большие массогабаритные характеристики. Значительные габаритные размеры пневмоцилиндра в осевом направлении ограничивают область его применения.
Известны пневматические приводы одностороннего действия, которые имеют лучшие массогабаритные характеристики. Пневмодвигателем в них является сильфон (см. Слюсарев А.И. Гидравлические и пневматические элементы и приводы промышленных роботов: Учебник для техникумов по специальности «Эксплуатация промышленных роботов». - М.: Машиностроение, 1989. - 168 с.). В данных устройствах при подаче сжатого воздуха через канал питания и создании в рабочей полости избыточного давления сильфон растягивается, а при снятии давления возвращается в исходное положение за счет упругих свойств его боковой гофрированной поверхности.
Недостатком устройств являются небольшие развиваемые ими осевые усилия, так как величина давления питания ограничена упругими свойствами материала сильфона. Увеличение осевой силы приводит к снижению массогабаритных показателей и чувствительности устройства. Кроме этого неравномерность деформирования гофрированной поверхности сильфона приводит к перекосу его торцевой поверхности, что ограничивает его применение в качестве пневмодвигителя перемещения рабочего органа с требованиями плоскопараллельного движения.
Известен пневматический привод одностороннего действия (см. патент №2112175 «Мембранный сильфон», опубл. в БИ №15, 1998 г.), содержащий кольцевые мембраны, изогнутые и герметично скрепленные между собой по наружному и внутреннему контурам попарно. Жесткое соединение совместным изгибом стенок соседних мембран на 180 град, два раза в противоположных направлениях незначительно улучшает характер плоскопараллельного движения рабочего органа, а также снижает массогабаритные параметры и усложняет конструкцию.
Наиболее близким из аналогов является пневматический привод одностороннего действия (см. Сысоев С.Н., Мокеева Е.В. Вакуумное захватное устройство агрегатно-модульной конструкции / Сб. научных трудов: Автоматизированные станочные системы и роботизация производства, Тула, ТулГУ, 1996. - с.239-243). В данном устройстве в качестве привода перемещения рабочего органа применен сильфон, имеющий канал пневматического питания, одним концом закрепленный на корпусе, а на другом установлен рабочий орган, подпружиненный к корпусу пружиной в сторону сжатия сильфона. Данная конструкция с установкой пружины внутри рабочей полости сильфона позволяет увеличить осевые силы, создаваемые приводом, однако увеличивает габаритные размеры в осевом направлении и не обеспечивает плоскопараллельного перемещения рабочего органа.
Задачей предлагаемого изобретения является уменьшение габаритных размеров в осевом направлении сильфона и обеспечении плоскопараллельного перемещения рабочего органа, что дает в конечном итоге расширение области применения данных устройств.
Поставленная задача достигается тем, что в пневматическом приводе одностороннего действия, включающем сильфон, одним концом закрепленный на корпусе, а на другом установлен рабочий орган, подпружиненный к корпусу пружиной в сторону сжатия сильфона, соединенного с каналом пневматического питания, при этом новым является то, что пружина установлена в канале пневматического питания под углом к направлению движения рабочего органа и одним концом закреплена на корпусе, а другим - через тягу на рабочем органе. Кроме этого тяга выполнена не менее чем из трех нерастяжимых тросов, закрепленных на рабочем органе по периметру.
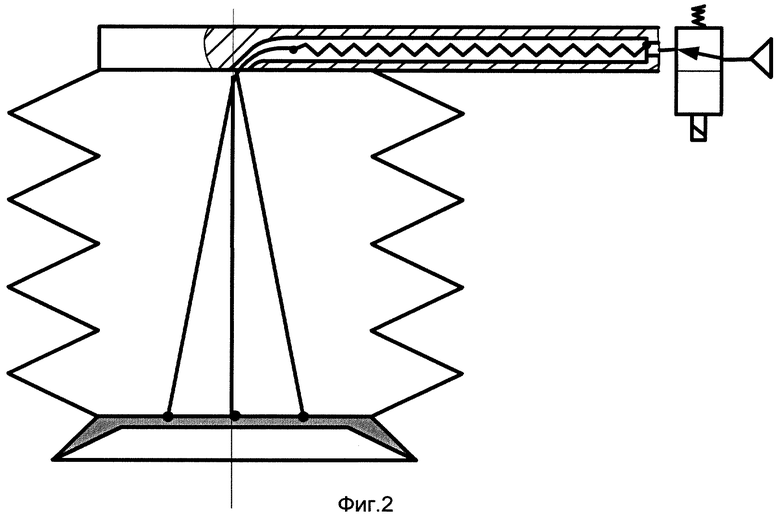
Пример реализации предлагаемого устройства показан на фиг.1, 2 (фиг.1 - исходное положение, 2 - при подаче питания).
Устройство состоит из корпуса 1, на котором закреплен одной торцевой поверхностью сильфон 2. На другой торцевой поверхности сильфона 2 установлен рабочий орган 3, представляющий собой присоску. Рабочая полость сильфона 2 выполнена герметичной и связана каналом питания, выполненным в корпусе 1 через распределитель 4 с избыточным давлением воздуха. Рабочий орган подпружинен пружиной 5, установленной в канале питания и закрепленной одним концом в корпусе 1, а другим - с тягой 6, закрепленной на торцевой поверхности сильфона 2.
Предлагаемое устройство работает следующим образом.
В исходном положении распределитель 4 отключен, рабочая полость сильфона 2 через канал питания соединена с атмосферой. Усилие, создаваемое пружиной 5, сжимает сильфон 2 и рабочий орган 3 занимает крайнее верхнее положение.
При включении распределителя 4 рабочая полость сильфона 2 соединяется с избыточным давлением воздуха. При этом силы, создаваемые избыточным давлением воздуха, преодолевают усилие удержания пружины 5 и сильфон 2 растягивается, перемещая рабочий орган 3. Величина перемещения зависит от величины давления питания. Причем выполнение тяги 6 из трех нерастяжимых тросов и крепление их по периметру со смещением относительно оси сильфона обеспечивает плоскопараллельное перемещение рабочего органа.
При выключении распределителя 4 рабочая полость сильфона 2 соединяется с атмосферой и под действием усилия пружины 5 сильфон 2 сжимается, занимая исходное положение.
Установка пружины вне сильфона под углом к направлению движения рабочего органа позволяет уменьшить габаритные размеры устройства в направлении перемещения рабочего органа. Кроме этого снимаются ограничения по длине, количеству витков используемой пружины, что расширяет возможный диапазон ее характеристик.
Установка пружины в канале питания не требует дополнительной герметизации ее рабочей зоны. Выполнение тяги не менее чем из трех нерастяжимых тросов, закрепленных по периметру со смещением относительно оси сильфона, обеспечивает плоскопараллельное перемещение рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сильфонный привод криволинейного перемещения | 2022 |
|
RU2785181C1 |
| Привод криволинейного перемещения | 2019 |
|
RU2722200C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2736902C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749544C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749545C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| Способ работы сильфонного привода криволинейного перемещения | 2021 |
|
RU2765865C1 |
| Вакуумный захватный агрегатный модуль | 2019 |
|
RU2703771C1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
Привод предназначен для использования в исполнительных пневматических механизмах, в том числе в модулях, выполняющих взятие и установку деталей на рабочую поверхность. В подпружиненном сильфоне пружина установлена в канале пневматического питания под углом к направлению движения рабочего органа и одним концом закреплена на корпусе, а другим - через тягу на рабочем органе. Кроме этого тяга выполнена не менее чем из трех нерастяжимых тросов, закрепленных на рабочем органе по периметру. Установка пружины вне сильфона под углом к направлению движения рабочего органа позволяет уменьшить габаритные размеры устройства в направлении перемещения рабочего органа. 1 з.п. ф-лы, 2 ил.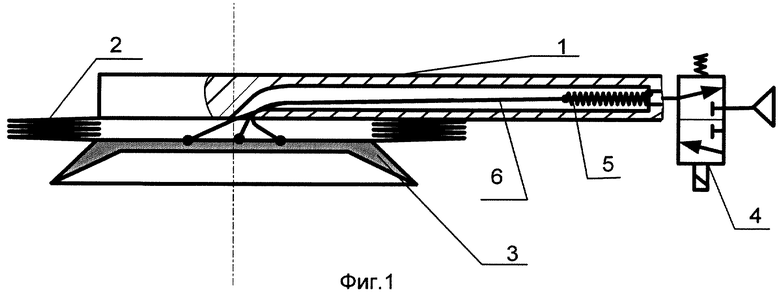
| Сысоев С.Н., Мокеева Е.В | |||
| Вакуумное захватное устройство агрегатно-модульной конструкции, Сб | |||
| научных трудов: Автоматизированные станочные системы и роботизация производства - Тула: ТулГУ, 1996, с.239-243 | |||
| МЕМБРАННЫЙ СИЛЬФОН | 1993 |
|
RU2112175C1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОНСЕРВОВ "КОТЛЕТЫ РЫБООВОЩНЫЕ В ТОМАТНО-ГАРНИРНОМ СОУСЕ" | 2011 |
|
RU2469594C1 |
| ЖЕВАТЕЛЬНЫЕ ПИЩЕВЫЕ КОМПОЗИЦИИ | 2014 |
|
RU2665490C2 |

