Заявленные технические решения объединены единым изобретательским замыслом и заявленное устройство предназначено для реализации способа.
Заявленные изобретения относятся к техническим средствам создания препятствия пролету птиц и предотвращения возможной угрозы переноса ими вирусных заболеваний, в частности «птичьего гриппа»* (* Правомерность использования способов и устройств, препятствующих пролету птиц, несущих угрозу инфекции, предусмотрена «Международной Конвенцией по охране птиц, полезных в сельском хозяйстве» (12.12.1905 г.), в соответствии со ст.9 которой: «Каждая из договаривающихся стран может установить исключения, на которые не будут распространяться положения настоящей Конвенции для: птиц, которые ... считаются вредными для сельского хозяйства»).
Известны способы постановки препятствий для пролета птиц.
Так в известном способе, реализованном в устройстве для ловли птиц по пат US №5966862 от 19.10.1999 г., устанавливают в районе блокирования сеть, закрепляют одну сторону сети с механизмом ее развертывания и блокируют птиц, совершивших посадку на охраняемую площадку, путем набрасывания на площадку сети с помощью механизма развертывания.
Недостатком известного способа является ограниченная область применения, т.к. с его помощью можно защищать от птиц зафиксированную площадку, например двор птицефермы.
Наиболее близким по своей технической сущности к заявленному является известный «Способ ловли птиц» (способ постановки препятствий для пролета птиц) по авторскому свидетельству СССР №65394, МПК А01М 23/32 по заявке №502/320028 от 6.01.43 г., опубл. 1945 г.
Способ-прототип заключается в выполнении следующей последовательности действий:
между двумя летательными аппаратами (самолетами) закрепляют сеть;
поднимают сеть самолетами на требуемую высоту, на которой проходит траектория полета стаи птиц;
ориентируют плоскость сети перпендикулярно направлению полета птиц;
захватывают стаю птиц сетью путем налета самолетов сзади на стаи птиц с опережающей скоростью;
захлопывают сеть с попавшимися в нее птицами и опускают ее (например, с помощью парашюта) на землю.
Недостатками известного способа являются:
- низкая эффективность предотвращения пролета птиц, т.к. постановка препятствия возможна только при визуальном обнаружении уже подлетающей стаи птиц;
- высокая стоимость реализации способа, предполагающая поддержание в готовности к немедленному вылету двух экипажей самолетов, большой расход топлива и т.п.
Известны устройства постановки препятствия для пролета птиц.
Так известное устройство для ловли птиц по патенту GB №190900963 от 20.05.1909 г., МПК А01М 23/00 состоит из короба, затянутого сеткой и снабженного откидной крышкой, предварительно зафиксированной в открытом положении. Фиксатор крышки соединен с элементом разблокирования крышки, на котором размещают приманку для птиц.
Под тяжестью севшей птицы на элемент разблокировки крышки последняя захлопывается и блокирует птицу в коробе.
Недостатком известного аналога является его низкая эффективность и отсутствие возможности постановки препятствия пролету птиц без их посадки.
Наиболее близким по своей технической сути к заявленному является известное устройство для ловли птиц по патенту US №5966862 от 19/10/1999 г., МПК А01М 23/00.
Устройство-прототип состоит из сети, концы одной из сторон которой соединены с штангой, соединенной с механизмом развертывания. Штанга снабжена парой выталкивающих пружин с замковым элементом. Развертывающаяся штанга приводится в рабочее положение вспомогательным механизмом, обеспечивающим развертывание сети в необходимом направлении. Сеть покрывает участок охраняемой территории, например двор птицефермы.
Недостатком ближайшего аналога является низкая эффективность предотвращения пролета птиц, т.к. постановка препятствия возможна только при их посадке на охраняемую территорию.
Целью заявленных технических решений является разработка способа и устройства постановки препятствия для пролета птиц, обеспечивающих повышение эффективности предотвращения пролета птиц над охраняемой территорией при одновременном снижении материальных затрат на их реализацию.
Заявленные изобретения расширяют арсенал средств данного назначения.
В заявленном способе поставленная цель достигается тем, что в известном способе постановки препятствия для пролета птиц, заключающемся в том, что между летательными аппаратами (ЛА) закрепляют сеть, поднимают ее на требуемую высоту и устанавливают плоскость сети перпендикулярно прогнозируемой траектории пролета птиц, в качества ЛА используют N≥2 летательных аппаратов легче воздуха (ЛАЛВ), например аэростаты или зонды. ЛАЛВ устанавливают вдоль линии на расстоянии D друг от друга и удерживают их у поверхности земли. Сканируют воздушное пространство, например, с помощью радиолокационной станции (РЛС) миллиметрового диапазона. После обнаружения летящих птиц вычисляют параметры траектории полета: высоту и угол α относительно нормали к линии, вдоль которой установлены ЛАЛВ. Затем формируют управляющие сигналы, по которым подсоединяют сети к ЛАЛВ, примыкающим с двух сторон к точке пересечения траектории полета птиц, и поднимают ЛАЛВ с закрепленными к ним сетями на высоту Н, превышающую высоту полета птиц.
В заявленном устройстве поставленная цель достигается тем, что в известном устройстве постановки препятствия для пролета птиц, содержащем сеть, одной из своих сторон закрепленную на штанге, и механизм развертывания, дополнительно введены N≥2 ЛАЛВ, например аэростаты или зонды, которые установлены у поверхности земли на расстоянии D друг от друга вдоль линии, перпендикулярной вероятной траектории пролета птиц. У земли каждый ЛАЛВ удерживают с помощью троса, соединенного с соответствующим механизмом развертывания сети (МРС). Между каждой парой ЛАВЛ установлен свободно вращающийся барабан (СВБ) с намотанной на нем сетью. Каждая штанга с закрепленной на ней сетью на концах снабжена элементами ее сцепления (ЭС) с соответствующим ЛАЛВ. Питающие входы N МРС и управляющие входы N ЭС подключены соответственно к N питающим и N управляющим выходам коммутатора, N-разрядный управляющий и N-разрядный питающий входы коммутатора подключены к N-разрядным соответственно управляющему и питающему выходам процессора. Входная информационная шина процессора подключена к информационному выходу блока сканирования воздушного пространства (БСВП). В качестве БСВП могут использовать РЛС миллиметрового диапазона.
Каждый из N МРС состоит из лебедки с намотанным на него тросом, удерживающим ЛАЛВ, и электродвигателя, обеспечивающего вращение лебедки. Питающий вход электродвигателя является питающим входом механизма развертывания.
Каждый ЭС состоит из захвата, снабженного подпружиненными зацепами (ППЗ).
Каждый ППЗ установлен в соосных отверстиях, выполненных на конце штанги и в пластине, закрепленной на тросе, и исполнительного элемента (ИЭ). Управляющий вход ИЭ является управляющим входом ЭС.
Благодаря новым совокупностям существенных признаков в заявленных способе и устройстве обеспечивается своевременное обнаружение подлетающих птиц, точное вычисление траектории их полета и оперативный подъем сетей, препятствующих пролету птиц, чем достигается повышение эффективности действий по предотвращению пролета птиц над охраняемой территорией при одновременном снижении материальных затрат на их реализацию.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам каждого из заявленных технических решений, отсутствуют в известных источниках информации, что указывает на соответствие заявленных изобретений условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленных объектов, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния преобразований, предусматриваемых отличительными существенными признаками каждого из заявленных изобретений на достижение указанного технического результата, что позволяет считать заявленные изобретения соответствующими условию патентоспособности «изобретательский уровень».
Заявленные объекты поясняются чертежами, на которых показаны:
на фиг.1 - структурная схема устройства;
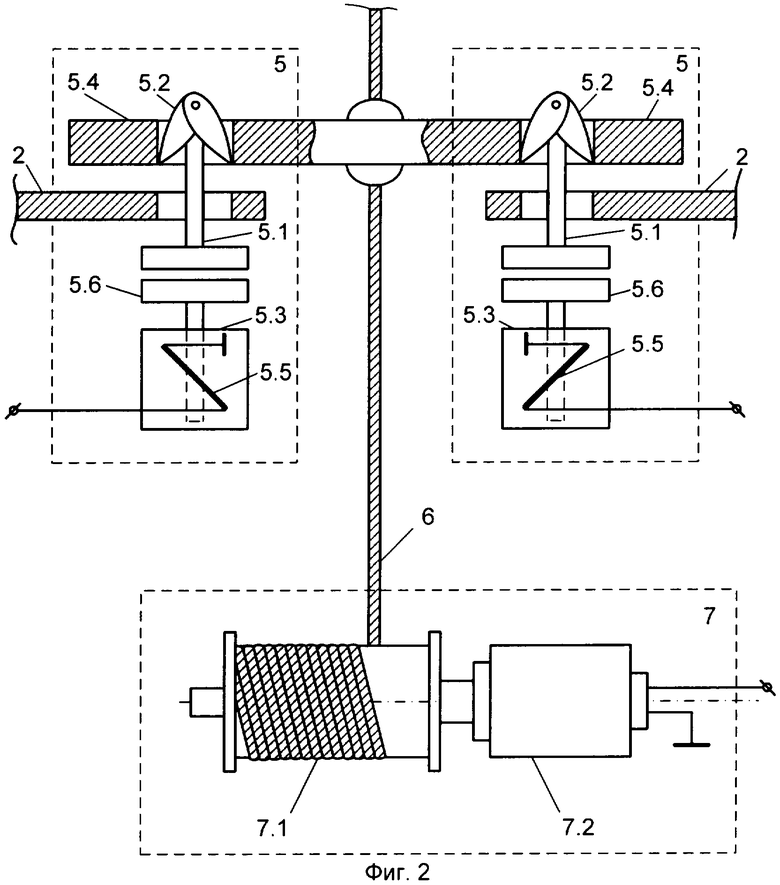
на фиг.2 - вариант построения механизма развертывания;
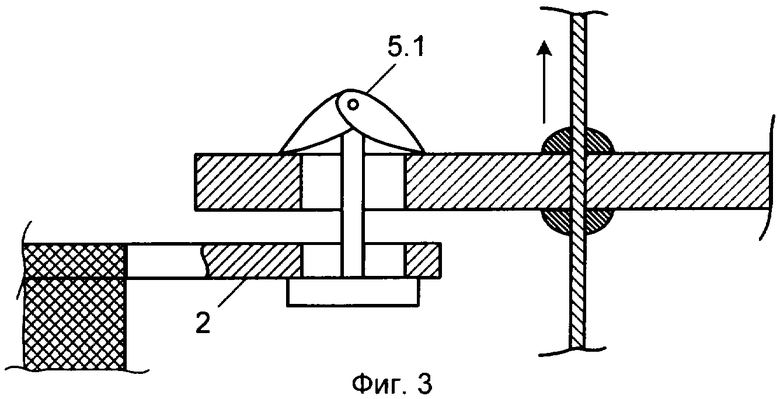
на фиг.3 - вариант исполнения элемента оцепления;
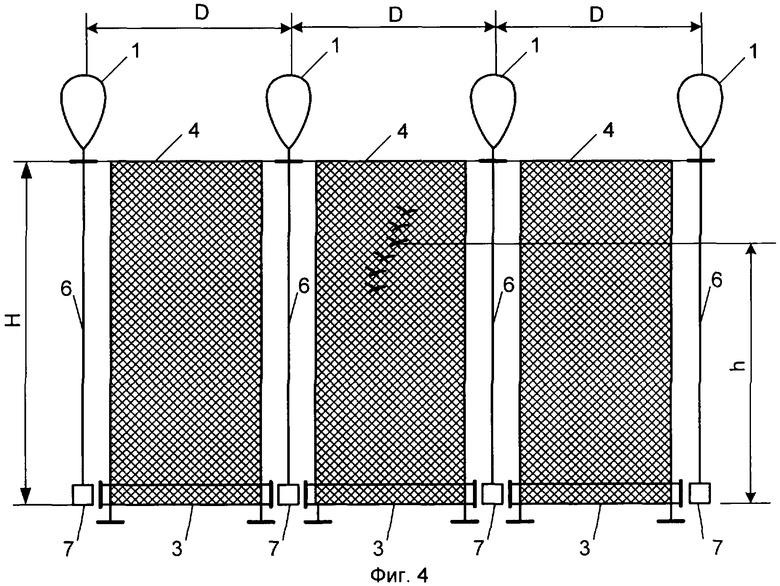
на фиг.4 - фрагмент устройства в развернутом положении;
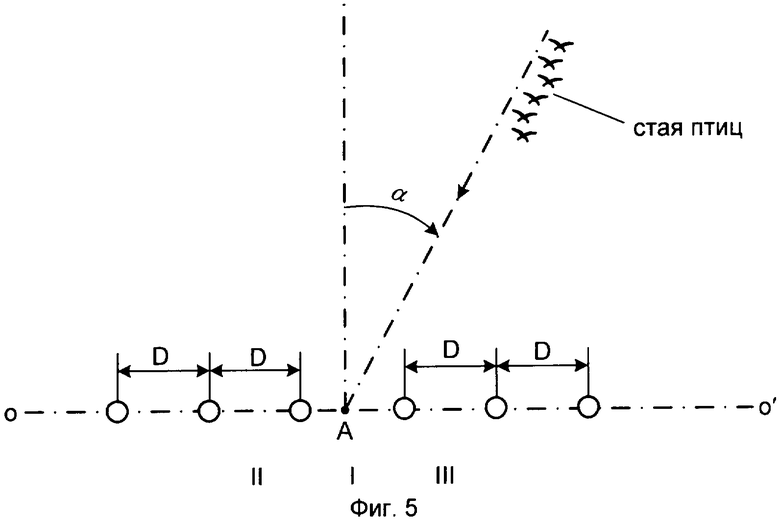
на фиг.5 - рисунок, поясняющий порядок определения параметров траектории полета птиц;
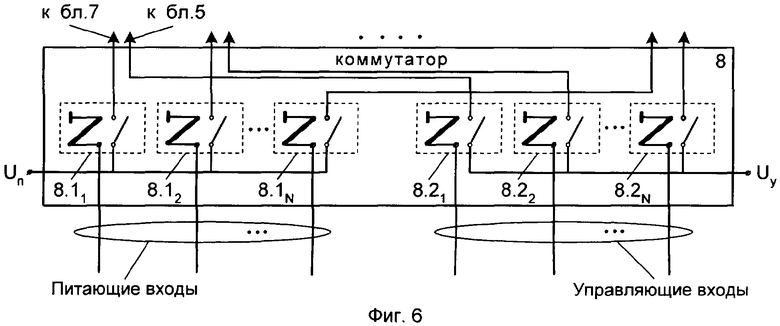
на фиг.6 - вариант схемы коммутатора;
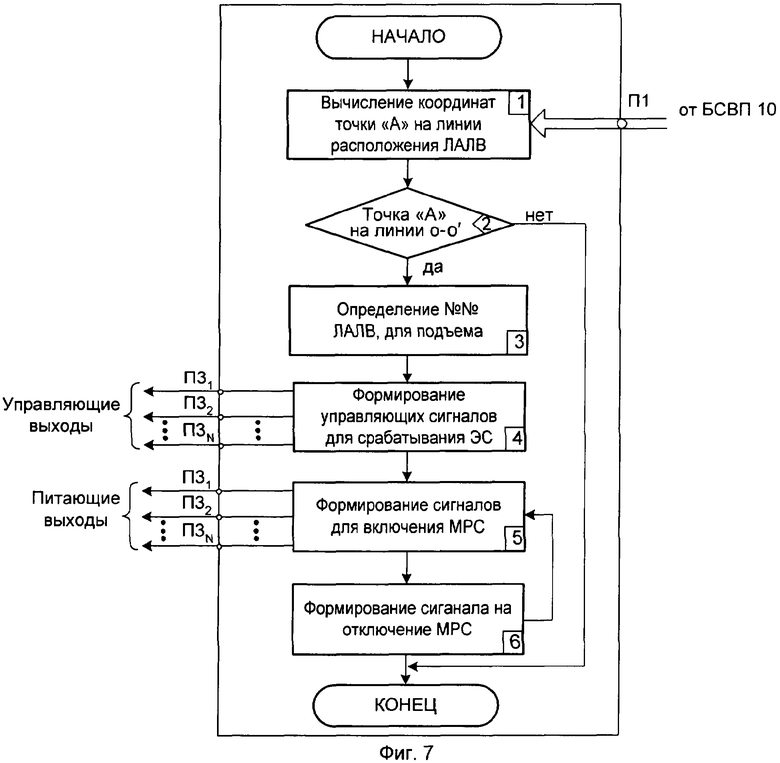
на фиг.7 - алгоритм функционирования процессора.
Реализация заявленного способа поясняется следующим.
Для предотвращения пролета птиц, несущих угрозу вирусных болезней для птиц фермерских и личных хозяйств и для людей, на основе статистических данных многолетних наблюдений за перелетными птицами определяют воздушные коридоры, в пределах которых наиболее вероятен пролет птиц. Если воздушные коридоры пересекают территории, подлежащие защите, на поверхности земли вдоль линии, перпендикулярной возможной траектории пролета птиц, размещают N≥2 ЛАЛВ 1 (см. фиг.1, 5). Между ЛАЛВ 1 закрепляют сети 4.
Число N ЛАЛВ 1 и расстояния D между ними выбирают исходя из требуемой протяженности постановки заграждения и предельной подъемной силы ЛАЛВ 1. В исходном состоянии ЛАЛВ 1 приводят к готовности к подъему и удерживают их у поверхности земли. В угрожающий период сканируют воздушное пространство, например, с помощью РЛС для обнаружения летящих птиц и определения параметров траектории их полета. В качестве таких параметров необходимо знать удаление обнаруженной стаи птиц от линии постановки препятствия, высоту полета h и угол α траектории их полета относительно перпендикуляра к линии постановки препятствия. Такие данные можно получить, например, с помощью радиолокационной курсоглиссадной системы типа РСП-6 (РСП-7), обеспечивающей возможность определения положения обнаруженного объекта (птиц) по высоте h, по азимуту α и по дальности (см. фиг.4, 5). С использованием элементарных формул геометрии и измеренных параметров траектории полета птиц вычисляют положение точки пересечения траектории с линией размещения ЛАЛВ 1 (на фиг.5 точка «А»). По положению точки «А» определяют те сети, которые следует поднять для постановки препятствия полету птиц. На фиг.5 эти сети обозначены как II, I и III. Затем формируют управляющие сигналы, по которым подсоединяют сети к соответствующим ЛАЛВ 1. На фиг.4 в качестве примера показаны три такие сети. После чего поднимают ЛАЛВ на высоту H, превышающую высоту h полета птиц.
Устройство, реализующее рассмотренный способ и показанное на фиг.1, состоит из N≥2 ЛАЛВ 1, N МРС 7, N-1 штанг 2 с закрепленной на каждой штанге одной стороны сети 4, N ЭС 5, коммутатора 8, процессора 9 и БСВП 10. Каждый ЭС 5 состоит из захвата 5.1 (см. фиг.2), снабженного ППЗ 5.2, который в исходном положении установлен в соосных отверстиях, выполненных на конце штанги 2 и в пластине 5.4, закрепленной на тросе 6, и исполнительного элемента (ИЭ) 5.3, представляющего из себя катушку соленоида 5.5 с подвижным сердечником 5.6. Управляющий вход ИЭ 5.3 является управляющим входом ЭС 5.
МРС 7 состоит (см. фиг.2) из лебедки 7.1 с намотанным на нее тросом 6, удерживающим соединенный с ним ЛАВЛ 1, и электрического двигателя (ЭД) 7.2, выходной вал которого соединен с осью лебедки 7.1. Питающий вход ЭД 7.1 является питающим входом МРС 7.
Коммутатор 8 предназначен для подключения питающего напряжения Uп и напряжения управляющего сигнала Uy к входам соответственно МРС 7 и ЭС 5 по командам, поступающим от процессора 9.
Вариант построения схемы коммутатора 8 показан на фиг.6. Коммутатор 8 состоит из N реле 8.1 для подключения питающего напряжения Uп на вход соответствующего МРС 7 и N реле 8.2 для подключения управляющего напряжения Uy на вход соответствующего ЭС 5.
Процессор 9 предназначен для вычисления положения точки «А» пересечения траектории полета птиц с линией расположения ЛАЛВ 1 по данным о параметрах полета h и α, поступающим от БСВП 10, и формирования управляющих сигналов на управляющие и питающие выходы для подсоединения соответствующих ЭС 5, включения соответствующих МРС 7 и подъема сетей на высоту Н (см. фиг.4). Алгоритм работы процессора показан на фиг.7. К входному порту П 1 подключен выход БСВП 10, а к выходным портам П21-П2N и П31-П3N подключены соответственно управляющие и питающие входы коммутатора 8.
Устройство работает следующим образом. В угрожающий период возможного пролета птиц, зараженных вирусами, представляющими опасность для экологии, людей и животных, размещают готовые к подъему ЛАЛВ 1 вдоль линии о-о′ (см. фиг.1, 5), перпендикулярную возможной траектории пролета птиц. С помощью БСВП 10 сканируют воздушное пространство и после обнаружения подлетающих птиц вычисляют параметры траектории их полета: высоту h, угол α относительно нормали о-о′, удаление и скорость полета. Данные первичных параметров с выхода БСВП 10 подают на порт П1 процессора 10. В процессоре 10 (см. фиг.7) вычисляют положение точки «А» пересечения траектории полета птиц с линией о-о′, вдоль которой размещены ЛАЛВ 1. Если точка «А» пересекает линию о-о′, в процессоре определяют номера нескольких ЛАВЛ 1, примыкающих с двух сторон к точке «А». На фиг.5 условно эти пары обозначены I, II и III. После этого в процессоре формируют управляющие сигналы, которые через порты П 2, соответствующие выявленным парам ЛАЛВ 1, поступают на управляющие входы коммутатора 8 (см. фиг.6). При этом срабатывают соответствующие реле 8.2, через исполнительные контакты которых управляющее напряжение Uу подается на управляющие входы соответствующих ЭС 5. В ЭС 5 срабатывает ИЭ 5.3. Сердечник 5.6 ИЭ 5.3 ударяет по захвату 5.1. Вышедшие из отверстий ППЗ 5.2 разворачиваются под действием пружин, чем обеспечивается зацеп соответствующей штанги 2 с примыкающим к ней ЛАЛВ 1. После того как произошло сцепление штанг с ЛАЛВ 1, в процессоре 9 формируют сигнал команды на включение соответствующих МРС 7. Эти сигналы с соответствующих портов П3 процессора 9 поступают на питающие входы коммутатора 8. В коммутаторе 8 (см. фиг.6) срабатывают соответствующие реле 8.1. Через их исполнительные контакты питающее напряжение поступает на питающие входы соответствующих МРС 5. ЭД 7.2 начинает вращать лебедку 7.1. Происходит подъем ЛАЛВ 1, сцепленных со штангами 2, с которыми, в свою очередь, скреплены сети 4. ЛАЛВ 1 поднимают до высоты H, превышающей высоту h полета птиц (см. фиг.4). При достижении требуемой высоты H в процессоре 9 формируют сигнал на отключение МРС 7.
Таким образом, при реализации заявленных объектов обеспечивается своевременное и объективное обнаружение летящих птиц, оперативное развертывание препятствия для их пролета на угрожающем направлении, чем обеспечивается достижение сформулированного технического результата - повышение эффективности предотвращения (вероятности перехвата) пролета птиц над охраняемой территорией при одновременном снижении материальных затрат на реализацию изобретений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОЙ РАДИООХРАНЫ С ИСПОЛЬЗОВАНИЕМ ПАТРУЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2238590C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ ВЫПОЛНЕНИЮ ЗАДАЧ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2012 |
|
RU2497063C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2773453C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2023 |
|
RU2822878C1 |
| СПОСОБ ЗАЩИТЫ ГРУППОВОГО ОБЪЕКТА ДВУХФАЗНЫМ ДИСПЕРСНЫМ ОБРАЗОВАНИЕМ | 2023 |
|
RU2821302C1 |
| СПОСОБ ЗАЩИТЫ ГРУППОВОГО ОБЪЕКТА ОТ СРЕДСТВ ПОРАЖЕНИЯ ЗАГРАДИТЕЛЬНЫМ ДИСПЕРСНЫМ ОБРАЗОВАНИЕМ | 2020 |
|
RU2729321C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ, УПРАВЛЯЕМЫМ ПО РАДИОКАНАЛУ | 2023 |
|
RU2821809C1 |
| Способ перехвата летательных аппаратов самонаводящейся электроракетой | 2018 |
|
RU2685597C1 |
Изобретение относится к техническим средствам создания препятствия пролету птиц. Между летательными аппаратами закрепляют сеть, поднимают ее на требуемую высоту и устанавливают ее плоскость перпендикулярно к траектории пролета птиц. В качестве летательных аппаратов используют N≥2 летательных аппаратов легче воздуха. Устанавливают и удерживают их у поверхности земли на расстоянии D друг от друга. Сканируют воздушное пространство. Вычисляют параметры траектории их полета и точку ее пересечения с линией, вдоль которой закреплены летательные аппараты. Формируют управляющие сигналы, по которым подсоединяют сети к летательным аппаратам легче воздуха и поднимают их в воздух. 2 н. и 6 з.п. ф-лы, 7 ил.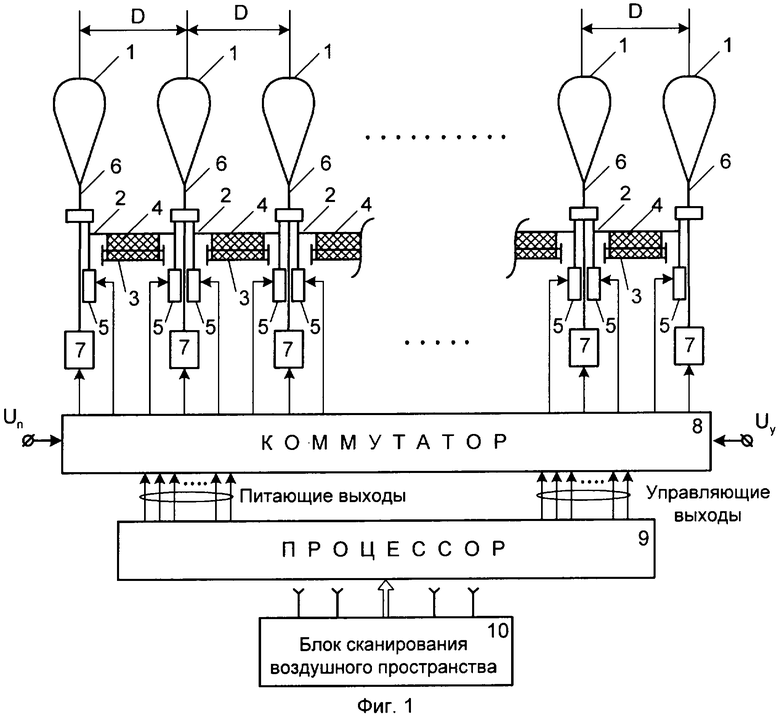
| Способ ловли птиц | 1943 |
|
SU65394A1 |
| JP 9084507 A, 31.03.1997 | |||
| JP 6233643 А, 23.08.1994 | |||
| Устройство для отлова птиц | 1984 |
|
SU1373389A1 |
| US 4434574 A, 06.03.1984. | |||

