Предлагаемая группа изобретений относится к силовым гидромеханизмам плунжерного типа, в частности к способам перемещений их рабочего органа, например поршня, и к устройствам для его осуществления.
Предлагаемое изобретение может быть использовано двигателестроении, в металлургической промышленности, в частности: в прессах, толкателях, нажимных устройствах и т.п..
Известен силовой гидромеханизм плунжерного типа, с помощью которого осуществлен способ перемещения рабочего органа, заключающийся в перемещении рабочего органа и создании им силы нажатия путем согласованного изменения объемов рабочей жидкости в двух сообщающихся камерах плунжера, при этом суммарный объем жидкости сохраняется неизменным:
ΣV=V1+V2=Const
V1-Var;
V2-Var.
Перекачку рабочей жидкости между камерами V1 и V2 с изменением их объемов осуществляют по внешним каналам через гидроусилители.
Недостатком известных конструкции и способа является то, что при больших давлениях и силах в сочетании с требованием высокой производительности это приводит к необходимости создания тяжелых конструкций больших габаритов и большой мощности.
Наиболее близким по технической сущности к предлагаемому решению является способ осуществления возвратно-поступательного движения рабочего органа (поршня и штока), включающего создание попеременного во взаимно-противоположных направлениях механического воздействия на рабочий орган путем изменения давления рабочего тела с помощью электрического разряда в рабочем теле (заявка на патент РФ №2002120039 по кл. F04B 9/00, за 2002 г.).
Недостатками известного способа являются невозможность точного позиционирования при микроперемещениях и создания больших нажимных сил в статике
Наиболее близким по технической сущности к предлагаемому является устройство плунжерного типа, содержащее корпус, установленный в корпусе с возможностью возвратно-поступательного движения рабочий орган в виде плунжера и штока, разделяющего корпус на две рабочие камеры с рабочим телом, и узел изменение давления в рабочих камерах (см. патент РФ №2230934 по кл. F04B 9/00, за 2002 г.).
В известной конструкции узел изменения давления рабочего тела выполнен в виде пар электродов, установленных в соответствующей рабочей камере и подключенных к источнику электрической энергии через выключатели, которые соединены с блоком управления, к входу которого подключены датчики положения рабочего органа.
Недостатком известного устройства являются:
сложность конструкции узла изменения давления рабочего тела, т.к. используют
- большие габариты устройства в целом;
- повышенная материалоемкость;
- невозможность обеспечения микроперемещений рабочего тела и создания больших нажимных сил.
Задачами, решаемыми предлагаемой группой изобретений, являются создания способа осуществления перемещений рабочего органа в устройствах плунжерного типа и устройства для его осуществления, позволяющего:
обеспечить точное позиционирование при микроперемещениях рабочего органа;
- создавать большие нажимные силы, при снижение потребляемой мощности устройства;
снизить габариты, материалоемкость и стоимость конструкции.
Технический результат в предлагаемом изобретении достигают созданием способа осуществления перемещений рабочего органа в устройствах плунжерного типа, включающего создание во взаимно-противоположных направлениях воздействия на рабочий орган путем изменения давлений в рабочих камерах, в котором, согласно изобретению, изменение давления в рабочих камерах производят при постоянном объеме рабочего тела в них путем добавления твердотельного носителя в рабочие камеры и перемещения его между ними.
Предлагаемый способ позволяет осуществлять микроперемещения, поршня и штока с любой малой скоростью, так что мощность, развиваемая при движении рабочего органа, мала при сколь угодно больших силах нажатия и давлениях.
Технический результат также в предлагаемом изобретение достигают созданием устройства плунжерного типа, содержащего корпус, установленный в корпусе с возможностью возвратно-поступательного движения рабочий орган в виде плунжера и штока, разделяющего корпус на две рабочие камеры с рабочим телом, в котором, согласно изобретению, в рабочих камерах установлен, по меньшей мере, один твердотельный носитель с механизмом его перемещения.
Изобретение характеризуется также тем, что механизм перемещения твердотельного носителя выполнен в виде вариатора объемов, состоящего из двух перемоточных блоков, фильеры, предназначенной для герметизации рабочих объемов камер, и носителя, соосно размещенного в фильере, концы которого закреплены в перемоточных блоках.
Установка фильеры вариатора объемов в поршне и размещение перемоточных блоков в рабочих камерах плунжера позволяет значительно уменьшить габаритные размеры устройства.
Изобретение характеризуется также тем, что устройство снабжено, по крайней мере, одним двухкамерным блоком, в котором установлен вариатор объемов, причем каждая камера блока соединена с соответствующей ей рабочей частью камеры с образованием сообщающихся сосудов, заполненных постоянными объемами рабочей жидкости, фильера вариатора размещена в перегородке между камерами блока. Это позволяет увеличить рабочий ход плунжера, в качестве твердотельного носителя используют проволоку, или ленту, или нить.
Сущность предлагаемой группы изобретений поясняется нижеследующим описанием и чертежами,
где на фиг.1 изображена схема устройства плунжерного типа;
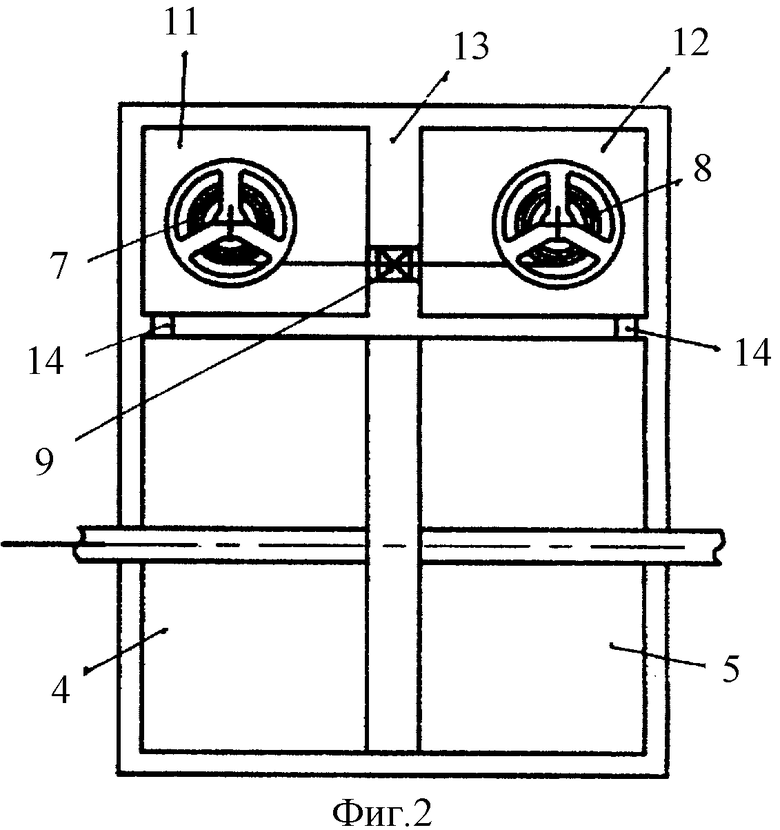
на фиг.2 - схема устройства плунжерного типа с дополнительным двухкамерным блоком;
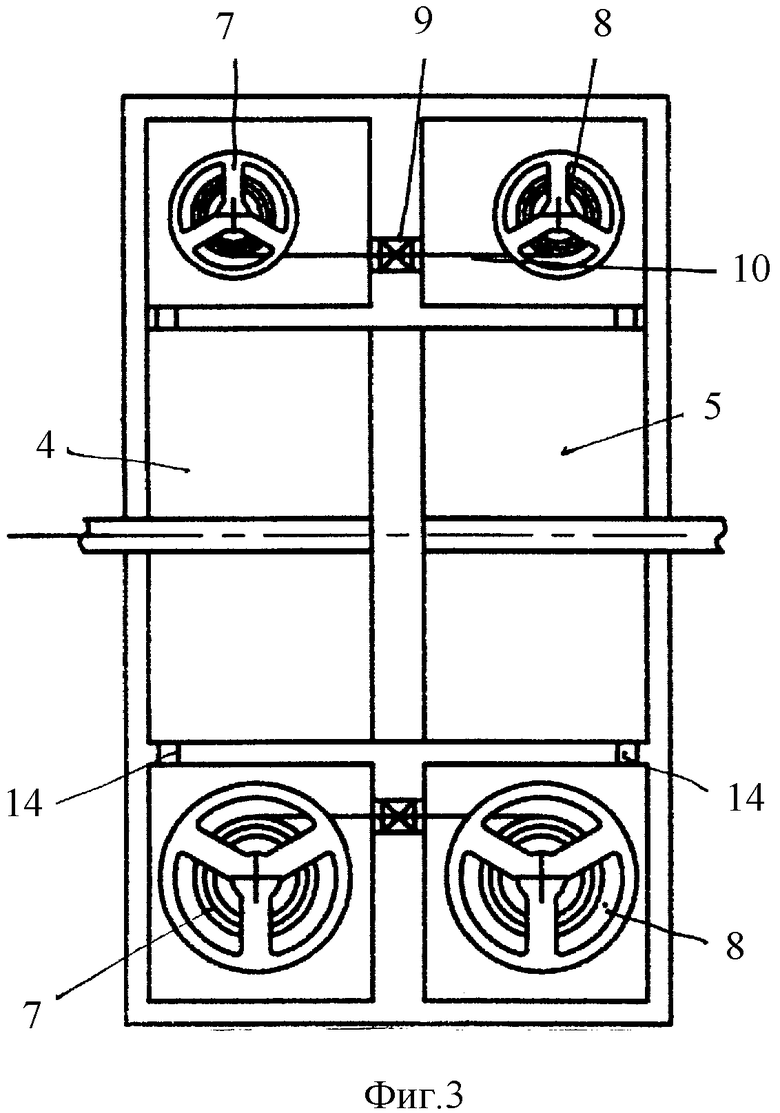
на фиг.3 - схема устройства плунжерного типа с двумя двухкамерными блоками.
Устройство плунжерного типа включает корпус 1, установленный в нем с возможностью возвратно-поступательного движения рабочий орган в виде плунжера 2 и штока 3, разделяющий корпус на две рабочие камеры 4 и 5 с рабочим телом 6, и установленный в рабочих камерах, по меньшей мере, один твердотельный носитель с механизмом его перемещения.
Механизм перемещения твердотельного носителя выполнен в виде вариатора объемов, состоящего из двух перемоточных блоков 7 и 8 (например, катушек), фильеры 9, предназначенной для герметизации рабочих объемов камер, и носителя 10, соосно размещенного в фильере, концы которого закреплены в перемоточных блоках 7 и 8.
Перемоточные блоки могут быть выполнены погружными и реверсивными
В качестве перемоточных блоков могут быть использованы магнитострикционные, пьезокерамические или пленочные емкостные движители, встраиваемых в зону фильеры 9.
Известно, что параметры и технологичные свойства предлагаемых устройств зависят от их конструктивного выполнения, которое может существенно изменяться при сохранении принципа действия, состоящего в поддержании постоянства рабочих объемов, заполненных жидкостью.
Для весьма малых значений рабочего хода поршня, требующих малого объема перемещаемой нити или ленты и соответственно малых размеров механизма протяжки, он может встраиваться непосредственно в рабочие полости плунжера в целях минимизации габаритных размеров.
При этом фильера 9 вариатора объемов установлена в поршне 2, а перемоточные блоки 7 и 8 размещены соответственно в рабочих камерах 4 и 5 плунжера.
Для больших значений рабочего хода поршня 2 размеры вариатора объемов возрастают, и он может быть установлен в дополнительном двухкамерном блоке, который может быть выполнен в виде отдельного конструктивного узла, присоединяемого к корпусу 1. Причем каждая камера 11 и 12 блока соединена с соответствующей ей рабочей частью камеры 4 и 5 с образованием сообщающихся сосудов, заполненных постоянными объемами рабочего тела, а фильера 9 вариатора размещена в перегородке 13 между камерами 11 и 12 блока
Количество двухкамерных блоков, соединенных с корпусом 1, может быть любым и зависит от технологических режимов создания нажимных режимов. В целях обеспечения двухстадийной работы устройство содержит два вариатора объемов с различными передаточными отношениями i1 и i2, т.е. с различными поперечными сечениями нити или ленты, как показано на фиг.3.
В качестве твердотельного носителя 10 используют проволоку, или ленту, или нить, которая заполняет собою поперечное сечение фильеры 9.
В качестве приводного электродвигателя может быть использован любой тип двигателя (не показан) (синхронный, шаговый, постоянного тока или асинхронный) и его расположение внутри (погруженное исполнение) или снаружи плунжерного механизма не имеет принципиального значения.
Рабочий процесс обеспечивают натяжением и перемоткой твердого носителя 10 вариатора объемов.
При вращении катушек 7 и 8 перемоточного устройства по часовой стрелке каждому линейному дискрету ΔХ перемещения твердого носителя 10 через фильеру 9 слева направо соответствует передача твердого микрообъема ΔVтв из камеры 7 в камеру 8.
Жидкость несжимаема, поэтому объемная убыль - ΔVтв в камере 7 и нарастание объема +ΔVтв в камере 8 может происходить только при встречном, по отношению к движению твердого носителя 10, перемещении поршня 2 под действием возникающего перепада давлений. Компенсирующие перемещения поршня 2 поддерживают постоянство объемов V1=V2=Const рабочей жидкости в камерах 7 и 8 плунжера.
Таким образом, в отличие от известных гидромеханизмов, работа которых основана на согласованном изменении объемов рабочей жидкости в камерах плунжера, работа предлагаемого изобретения основана на поддержании постоянства объемов рабочей жидкости плунжера.
При этом функции гидроусилителя выполняет механизм перемещения твердотельного носителя, исключающий необходимость перекачки рабочей жидкости.
Для предлагаемого механизма перемещения твердотельного носителя поступательных перемещений характерны три рабочих состояния:
- холостой ход в режиме свободного позиционирования с микронной и субмикронной точностью, когда сила внешнего сопротивления Fc=0 отсутствует или ничтожно мала;
- режим статического нажимного устройства, когда сила внешнего сопротивления Fc>F превышает силу, действующую на поршень;
- режим медленной работы (прессование, чеканка, штамповка), когда F>Fc.
В режиме холостого хода (позиционирование) необходимое избыточное давление Р мало и количественно его определяют отношением силы трения в предлагаемом устройстве Fтр к площади торцевой поверхности поршня, соприкасающейся с рабочей жидкостью
Р≥Fтр/S
В статическом режиме сила нажатия F поршня 2 пропорциональна силе f натяжения нити механизма перемещения твердотельного носителя, которая создает в поперечном сечении фильеры 9 и всей рабочей камере (корпусе 1) избыточное давление, где
s - площадь поперечного сечения фильеры (нити).
Сила нажатия при этом равна:
F=P×S=i×f,
где i - передаточное отношение механизма перемещения твердотельного носителя.
Коэффициент редукции н может варьироваться в широких пределах и приближенно соответствует отношению квадратов диаметра поршня D и диаметра фильеры d.
D=100 мм, d=0,1 мм, коэффициент редукции составляет i=10а, что позволяет при силе натяжения нити вариатора объемов f=1Н получить силу нажатия рабочего органа Р=100 т, если он выдерживает избыточное давление Р=1000 атм., возникающее в этом случае.
Сила нажатия ограничена предельно допустимым натяжением нити и прочностью всей конструкции, рассчитанной на некоторое предельное, избыточное давление.
В режиме медленной работы (например, прессования) соблюдают равенство работ и мощностей вариатора объемов (малые силы на больших и быстрых перемещениях нити или ленты) и поршня (большие силы на малых и медленных перемещениях поршня):
Р·Х=х·f,
где F, f - силы, действующие на поршень и нить вариатора объемов соответственно;
X, х - величины перемещений поршня и нити соответственно.
Увеличивая время процесса, т.е. замедляя скорости перемещений, происходит снижение мощности, потребляемой перемоточными блоками 7 и 8, что и позволяет, в конечном счете, радикально уменьшать размеры, мощность и стоимость медленно действующих силовых гидромеханизмов плунжерного типа (например, прессов), способных развивать при микроперемещениях огромные силы.
При двухстадийной работе два вариатора объемов имеют различные передаточные отношения i1 и i2.
При этом основную часть рабочего хода обеспечивают работой вариатора с меньшим передаточным отношением, а конец рабочего хода-вариатора с большим передаточным отношением, что позволяет многократно увеличить силы нажатия в конце хода.
Для проверки работоспособности предлагаемого способа осуществления перемещений рабочего органа в устройствах плунжерного типа был изготовлен опытный образец предлагаемого устройства, имеющего дополнительный двухкамерный блок, в котором установлен вариатор объемов (фиг.2).
Корпус 1 и двухкамерный блок с вариатором объемов соединены между собою двумя трубчатыми гидроканалами 14. При этом рабочая камера 4 сообщена с камерой 11 вариатора объемов, а камера 5 - с камерой 12 вариатора объемов.
Рабочее тело (жидкость), в качестве которого использована автомобильная жидкость гидроусилителя руля, залита при среднем положении поршня 2 плунжера и одинаковых объемах капроновой нити 9 диаметром 0,1 мм, намотанной на катушки вариатора объемов.
Общая длина капроновой нити, примененной в качестве носителя твердотельных объемов, составляет 16 м. При средней длине витка на катушке 100 мм в среднем положении (при заливке жидкости) на приемной и подающей катушках содержится по 80 витков.
Характерные размеры и примененные материалы опытного образца следующие.
Стальной корпус устройства имеет наружный диаметр 60 мм, осевую длину 70 мм, внутренний диаметр камеры и диаметр поршня из тефлона - 51 мм.
Стальной шток диаметром 10 мм при длине 100 мм проходит через тефлоновые уплотнения, смонтированные в торцевых щитах плунжера. Габаритные размеры вариатора объемов составляют 150×70×50 мм,
Перемоточные блоки (катушки) имеют размеры: внутренний диаметр намотки 25 мм; внешний диаметр 45 мм; осевой размер - 12 мм.
В качестве приводного двигателя использован шаговый двигатель ШДР-5; габариты 58×35 мм; масса - 0,25 кг, шаг - 2,14°; номинальный крутящий момент - 200 г·см; ток I=0,8 А; напряжение U=28 В.
Нитепротяжный механизм протаскивает капроновую нить через фильеру протяженностью 15 мм.
Диаметр фильеры равен диаметру капроновой нити с плюсовым допуском 5 мкм.
Были получены следующие результаты испытаний.
Коэффициент редукции для перемещений, поступательной скорости и тяговой силы твердотельного носителя, варьируемых объемов и поршня плунжера составил i=2500, т.е. в полном соответствии с отношением площадей поперечного сечения капроновой нити и поршня плунжера (за вычетом площади штока).
Максимальный ход штока 6 мм
При натяжении нити в 1 Н, сила, измеренная на штоке, 2500 Н, при избыточном давлении в расширяющейся камере Р=12,5 атм.=1,25 МПа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ малых перемещений рабочего органа в устройствах мембранного типа и устройство для его осуществления | 2015 |
|
RU2616678C2 |
| Гранулятор | 1976 |
|
SU656655A1 |
| ГИДРАВЛИЧЕСКОЕ УДАРНОЕ УСТРОЙСТВО | 2000 |
|
RU2184847C1 |
| Устройство регулирования и блокировки системы орошения горных машин | 1987 |
|
SU1537834A1 |
| НАСОС-ДОЗАТОР | 2013 |
|
RU2527001C1 |
| Нажимное устройство прокатной клети | 1980 |
|
SU869884A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ НЕФТЕКАЧАЛКА | 2004 |
|
RU2271470C2 |
| Устройство для регулирования жесткости прокатной клети | 1977 |
|
SU749479A1 |
| ПОГЛОЩАЮЩИЙ АППАРАТ АВТОСЦЕПКИ | 1996 |
|
RU2115578C1 |
| АВТОМАТИЧЕСКОЕ НАГНЕТАТЕЛЬНОЕ УСТРОЙСТВО ВЫСОКОВЯЗКИХ МАТЕРИАЛОВ | 2012 |
|
RU2499947C1 |
Группа изобретений относится к силовым гидромеханизмам плунжерного типа, в частности к способам перемещений их рабочего органа, предназначено для использования в двигателестроении, в металлургической промышленности, в частности в прессах, толкателях, нажимных устройствах и т.п. В способе осуществления перемещений рабочего органа в устройствах плунжерного типа изменение давления в рабочих камерах производят при постоянном в них объеме рабочего тела путем добавления твердотельного носителя в рабочие камеры и перемещения его между ними. Устройство снабжено, по крайней мере, одним механизмом перемещения твердотельного носителя с механизмом его перемещения. Обеспечивается точное позиционирование при микроперемещениях рабочего органа, создаются большие нажимные силы при снижении потребляемой мощности устройства. 2 н. и 4 з.п. ф-лы, 3 ил.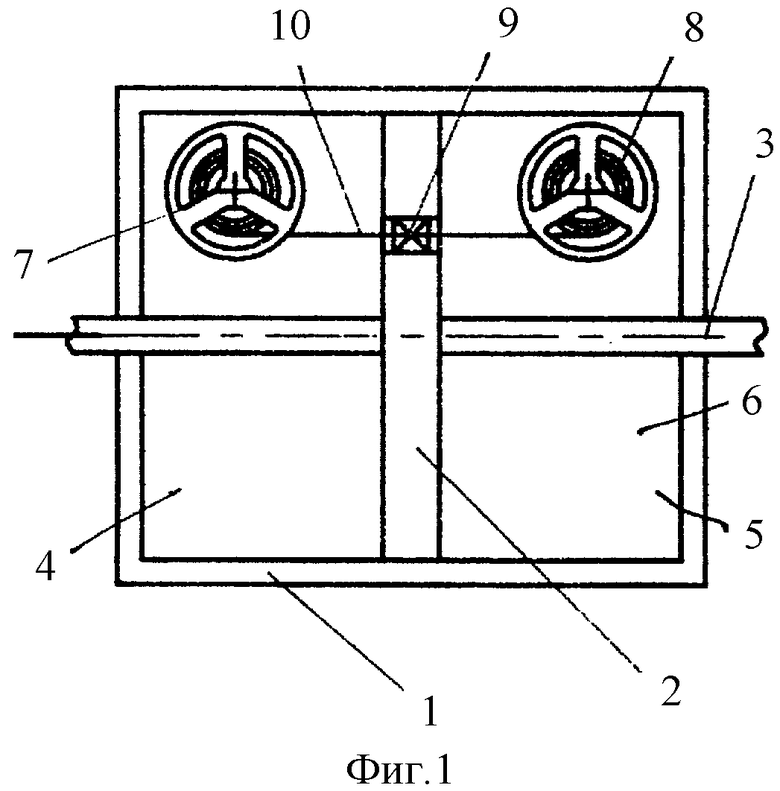
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ РАБОЧЕГО ОРГАНА | 2002 |
|
RU2230934C2 |
| Силовой цилиндр | 1980 |
|
SU903587A1 |
| Силовой цилиндр одностороннего действия | 1982 |
|
SU1079916A1 |
| Электрогидравлический насос | 1985 |
|
SU1449706A1 |

