Изобретение относится к метеорологии, к способам для определения физических параметров атмосферы, и позволяет определять направление и скорость движения нижней границы облачности (НГО).
Известен способ измерения высоты, скорости и направления движения нижней границы облаков посредством измерителя [2], заключающийся в измерении угловых координат выбранного участка нижней границы облачности относительно двух неподвижных матричных фотоприемников, имеющих регулярную структуру положения пикселей, и расположенных таким образом, что их оптические оси имеют известные вертикальные и горизонтальные углы и лежат в одной плоскости, а углы обзора перекрываются на определенной высоте между ними. Недостатками данного способа являются проблема выбора и идентификации одного и того же фрагмента облачности, которая выполняется вручную оператором, повышенная чувствительность системы к погрешностям фотоприемников, сравнительно высокая стоимость изготовления и эксплуатации измерителя, малый участок обзора и, как следствие, сложности и высокой погрешности в определении направления и скорости движения в случаях присутствия распределенного поля облачности, превышающего поле зрения прибора, когда идентификация выбранного участка нижней границы облачности невозможна, то есть такая система может работать только при высоких контрастах (облако-просвет) излучения "разорванных форм облачности": кучевых, слоисто-кучевых, мощно-кучевых облаков. Способ не может использоваться при вихревых структурах форм облачности.
Задачей, на решение которой направлено данное изобретение, является автоматизация процесса сканирования и анализа облачного поля.
Технический результат - автоматизация, повышение точности определения направления и скорости движения нижней границы облачности как днем, так и ночью в реальном масштабе времени по смещению ее пространственной структуры собственного излучения и расширение функциональных возможностей метеорологических наблюдений.
Сравнение заявляемого способа с прототипом позволило установить соответствие его условию "новизна". При сравнении заявляемого способа с другими известными техническими решениями не выявлены сходные признаки, что позволяет сделать вывод о соответствии условию "изобретательский уровень".
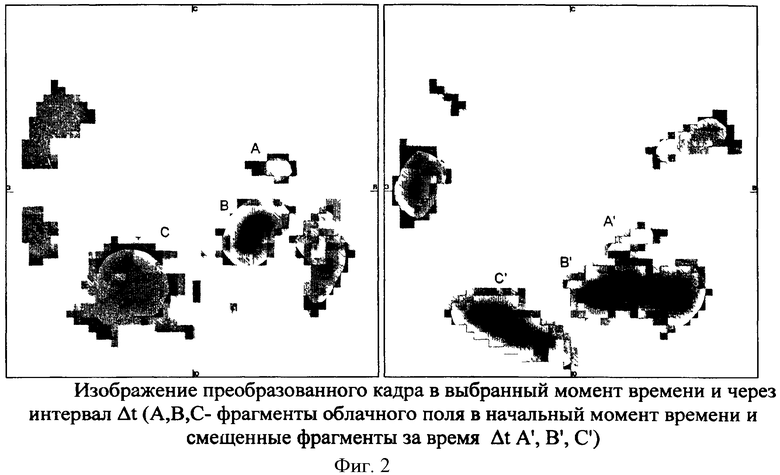
Способ поясняется чертежами. На фиг.1 приведен пример отображения кадра изображения по собственному излучению облачности (темный цвет) в проекции на плоскость; на фиг.2 приведено изображение преобразованного кадра в выбранный момент времени и через интервал Δt.
Указанный технический результат при осуществлении изобретения достигается посредством широкопанорамной автоматизированной сканирующей системы [1], которая осуществляет непрерывное круговое сканирование в диапазоне собственного излучения поля облачности по альмукантарату за время, при котором пространственная структура излучения облачного поля остается неизменной. За это время регистрируется ряд значений энергетической яркости, или радиационной температуры облачного поля через каждый градус, или минуты дуги, то есть определяется высота НГО, однозначно связанной с радиационной температурой. После завершения записи данных угол наклона сканирующего зеркала изменяется, цикл повторяется, регистрируется следующая строка. Через заданное количество строк сканирующее зеркало широкопанорамной автоматизированной сканирующей системы возвращается в исходное начальное положение, цикл повторяется, записывается следующий кадр.
Таким образом, регистрируется набор матриц, где по горизонтали - N значений, а по вертикали - М. Каждое из N*M значений представляет собой конкретную область - изображение в инфракрасной области на небесной сфере. Оценив высоту НГО по значению энергетической яркости радиационной температуры, строится проекция собственного излучения облачности на плоскость (фиг.1). Затем осуществляется
формы матрицы для перехода от угловых координат к декартовым координатам (фиг.2). Поскольку изображение проекции облачного поля строится вне зависимости от его реальной высоты, то линейный масштаб отдельной ячейки зависит от конкретной высоты НГО и определяется по формуле
 ,
,
где Ннго - высота НГО (в метрах), Hpxl - условная высота НГО (в пикселях) для построения изображения проекции НГО, А - выбранный размер ячейки (в пикселях).
Для определения вектора движения ряда кадров производится попарное сравнение всех соседних кадров, и для каждой пары определяется направление сдвига. Для определения сдвига между матрицами M1 и М2 (фиг.2) вычисляется ряд значений меры различия между матрицей M1 и смещенной матрицей М2. В качестве меры различия используется суммарное значение разностей излучения ячеек

Минимальному значению меры различия соответствует пара значений (Δх,Δу) - наиболее вероятное смещение второго кадра относительно первого.
Вычислив смещения для всего набора кадров, можно построить ломаную линию, усреднение которой даст вектор движения НГО, на выбранном интервале времени. Координаты вектора (х, у) показывают, что на выбранном интервале времени НГО сместилась от начального положения на х ячеек по оси абсцисс и у ячеек по оси ординат. Перейти к метрическим координатам можно исходя из линейного размера ячейки. Зная интервал времени Δt, в течение которого производились измерения, и координаты вектора (х, у) определяются составляющие скорости Vx и Vy, и затем скорость V
и направление движения НГО (угол φ)
Точность вычисления скорости и направления движения достигается за счет суммирования и усреднения множества отдельных векторов на малых промежутках в реальном масштабе времени.
Источники информации
1. Патент РФ №2331853, МПК G01J 3/06, изобретение "Устройство распознавания форм облачности".
2. Патент РФ №2321029, МПК G01W 1/00, изобретение "Способ определения высоты, направления и скорости движения нижней границы облачности".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2011 |
|
RU2497159C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ФОРМ ОБЛАЧНОСТИ | 2006 |
|
RU2331853C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА СЛОЖНОМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2461017C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНВЕКТИВНЫХ ОПАСНЫХ МЕТЕОРОЛОГИЧЕСКИХ ЯВЛЕНИЙ ДЛЯ ЕВРОПЕЙСКОЙ ТЕРРИТОРИИ РОССИИ | 2011 |
|
RU2467361C2 |
| СПОСОБ ОЦЕНКИ ОБЛАЧНОСТИ НОЧНОЙ АТМОСФЕРЫ И ДАТЧИК НОЧНОЙ ОБЛАЧНОСТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678950C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА МАСКИРУЮЩЕМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2480780C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ, НАПРАВЛЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2006 |
|
RU2321029C1 |
Способ может быть использован для метеорологических наблюдений, например дистанционного определения смерчей, грозовых состояний облачности, тайфунов, а так же наблюдения движения летательных аппаратов. В способе посредством широкопанорамной автоматизированной сканирующей системы осуществляют сканирование в диапазоне собственного излучения поля облачности и регистрируют набор кадров, которые представляют собой набор матриц, где по горизонтали - N значений, а по вертикали - М, и каждое из N*M значений представляет собой конкретную область - изображение в инфракрасной области на небесной сфере. Осуществляют изменение формы матрицы для перехода от угловых координат к декартовым координатам, производят попарное сравнение всех соседних кадров и для каждой пары определяют направление сдвига, для чего определяют наиболее вероятный сдвиг между кадрами. Вычисляют сдвиги для всего набора кадров и строят ломаную линию, усреднение которой дает вектор движения нижней границы облачности, по которому определяют направление и скорость ее движения. Технический результат - автоматизация и повышение точности определения направления и скорости движения нижней границы облачности в реальном масштабе времени и расширение функциональных возможностей метеорологических наблюдений. 2 ил.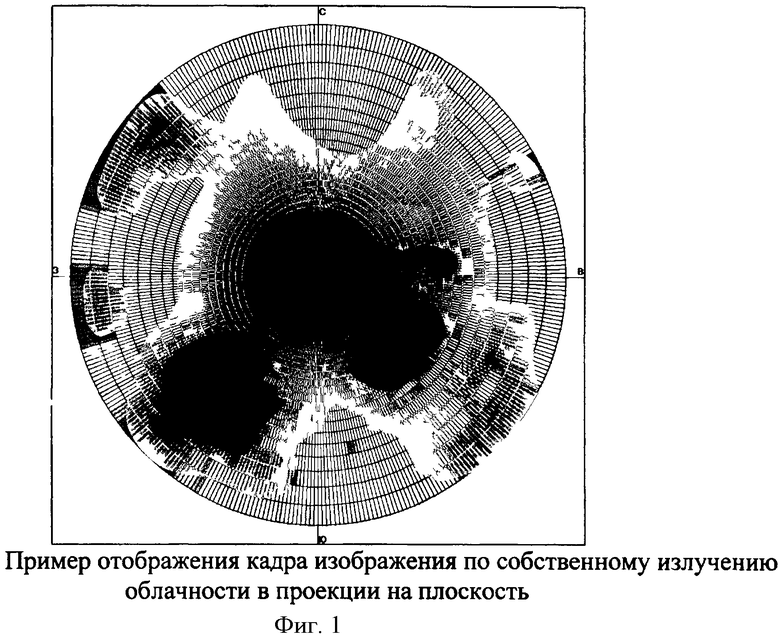
Способ определения направления и скорости движения нижней границы облачности в заданном интервале времени, в котором посредством широкопанорамной автоматизированной сканирующей системы осуществляют сканирование в диапазоне собственного излучения поля облачности, регистрируют набор кадров, которые представляют собой набор матриц, где по горизонтали N значений, а по вертикали - М, и каждое из N·M значений представляет собой конкретную область - изображение в инфракрасной области на небесной сфере, затем осуществляют изменение формы матрицы для перехода от угловых координат к декартовым координатам, производят попарное сравнение всех соседних кадров и для каждой пары определяют направление сдвига, для чего по минимальному значению меры различия между соответствующими матрицами определяют наиболее вероятный сдвиг между кадрами, вычисляют сдвиги для всего набора кадров и строят ломаную линию, усреднение которой дает вектор движения нижней границы облачности в заданном интервале времени, по которому определяют направления и скорости движения нижней границы облачности в заданном интервале времени.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ, НАПРАВЛЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2006 |
|
RU2321029C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ФОРМ ОБЛАЧНОСТИ | 2006 |
|
RU2331853C2 |
| JP 07066989 А, 10.03.1995 | |||
| US 7102617 B2, 05.09.2006 | |||
| RU 2182727 C2, 20.05.2002. | |||

