Изобретение относится к метеорологии, к способам для определения физических параметров атмосферы, и позволяет определять высоту нижней границы облачности (НГО).
Известен способ определения высоты нижней границы облаков посредством измерителя [1], заключающийся в измерении угловых координат выбранного участка нижней границы облачности относительно двух неподвижных матричных фотоприемников, имеющих регулярную структуру положения пикселей, и расположенных таким образом, что их оптические оси имеют известные вертикальные и горизонтальные углы и лежат в одной плоскости, а углы обзора перекрываются на определенной высоте между ними. Недостатками данного способа являются проблема выбора и идентификации одного и того же фрагмента облачности, которая выполняется вручную оператором, повышенная чувствительность системы к погрешностям фотоприемников, сравнительно высокая стоимость изготовления и эксплуатации измерителя, а также малый участок обзора.
Также известен светолокационный способ определения высоты НГО посредством прожектора [2], который посылает короткие импульсы и принимает отраженный сигнал. По времени задержки обратного сигнала рассчитывается высота НГО. Недостатками этого способа является то, что для просвечивающейся облачности отраженный сигнал будет ослабленным, что приведет к значительному увеличению погрешности измерения высоты. Кроме того, измерение НГО проводится лишь в конкретной точке.
Задачей, на решение которой направлено данное изобретение, является автоматизация процесса определения высоты НГО в реальном масштабе времени и получение распределения высот НГО в зоне сканирования радиометра практически во всей полусфере.
Технический результат - расширение функциональных возможностей метеорологических наблюдений за счет автоматизации определения высоты нижней границы облачности как днем, так и ночью в реальном масштабе времени по смещению ее пространственной структуры собственного излучения.
Сравнение заявляемого способа с прототипом позволило установить соответствие его условию "новизна". При сравнении заявляемого способа с другими известными техническими решениями не выявлены сходные признаки, что позволяет сделать вывод о соответствии условию "изобретательский уровень".
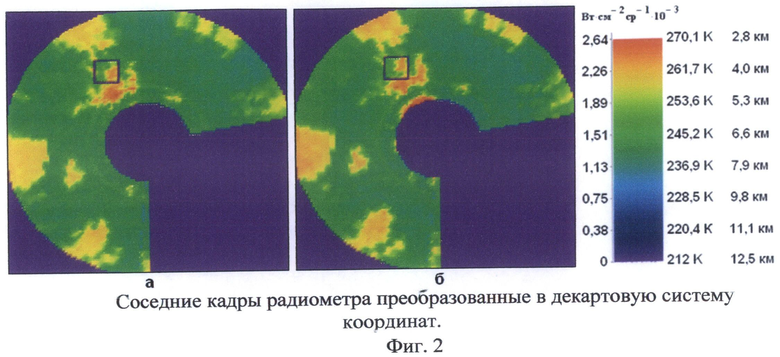
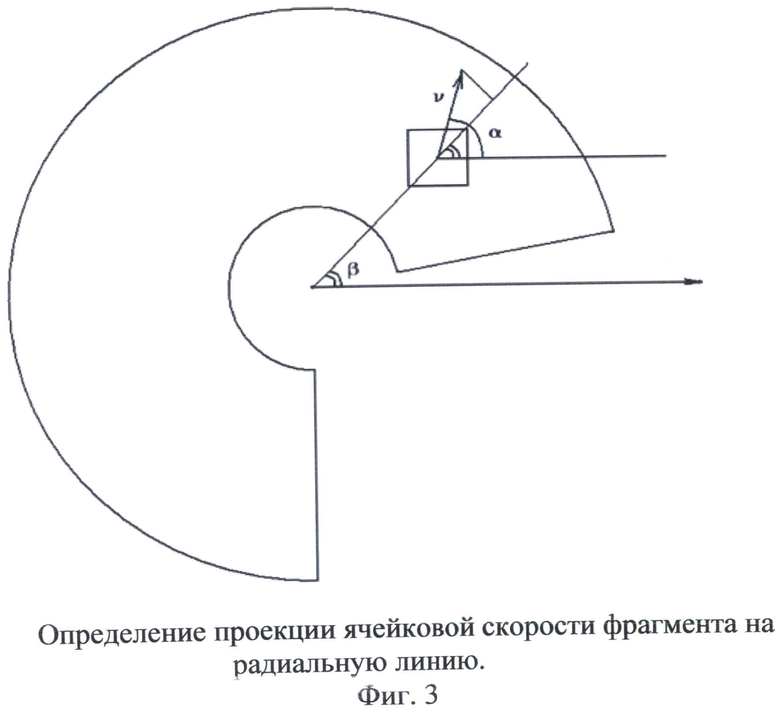
Способ поясняется чертежами. На фиг.1 приведена геометрия образования двух соседних по времени кадров по собственному излучению облачности в проекции на плоскость. Временной интервал между кадрами равен t. На фиг.2 приведено изображение преобразованных соседних кадров в декартовой системе координат. На фиг.3 иллюстрируется определение проекции скорости фрагмента облачного поля.
Указанный технический результат при осуществлении изобретения достигается посредством широкопанорамной автоматизированной сканирующей системы [3], которая осуществляет непрерывное круговое сканирование в диапазоне собственного излучения поля облачности по альмукантарату за время, при котором пространственная структура излучения облачного поля остается неизменной. За это время регистрируется ряд значений энергетической яркости, или радиационной температуры облачного поля через каждый градус, или минуты дуги, то есть, определяется высота НГО, однозначно связанной с радиационной температурой. После завершения записи данных по строке, угол наклона сканирующего зеркала изменяется, цикл повторяется и регистрируется следующая строка. Через заданное количество строк сканирующее зеркало широкопанорамной автоматизированной сканирующей системы возвращается в исходное начальное положение, цикл повторяется и записывается следующий кадр. Сканирующей системой автоматически определяются просветы в облаках по двум соседним кадрам, в реальном масштабе времени, как наиболее контрастные участки облачного неба, по которым определяется высота нижней границы облачности.
То есть, из записанных в память системы набора матриц (где по горизонтали N значений, а по вертикали - M) формируется кадр облачного неба. Каждое из N×M значений представляет собой конкретную область - изображение в инфракрасной области на небесной сфере. Затем программно осуществляется изменение формы матрицы, для перехода от угловых координат к декартовым (фиг.2).
Оба кадра условно разбиваются на 2 слоя по энергетической яркости. Нижний слой, который соответствует более высокой радиационной температуре, состоит из элементов с энергетической яркостью, превышающей 0,9·Bmax, в состав верхнего слоя входят элементы с меньшей радиационной температурой (с яркостью от 0,75·Bmax до 0,85·Bmax, где Bmax - устанавливаемый в системе порог максимального значения энергетической яркости кадра).
Для этой пары слоев (нижний/верхний) автоматически определяется наиболее контрастный участок, ограниченный рамкой (фиг.2). Под наиболее контрастным понимается участок кадра, содержащий в себе наибольшее количество ячеек соответствующих слоев. На кадре б (фиг.2) фрагмент слоя, ограниченный рамкой, смещен относительно своего положения на кадре а (фиг.2). Количеством ячеек (n), на которое сместился слой за время регистрации одного кадра (t), определяется ячейковая скорость слоя (ν).

Она задается горизонтальной и вертикальной составляющими смещения этого фрагмента. Область на кадре б (фиг.2) сдвигается по всем возможным вертикальным и горизонтальным направлениям от одной ячейки до максимального смещения d, которым определяется максимальная скорость. Элементы кадра б (фиг.2) внутри смещенной области вычитаются из соответствующих элементов отмеченной области кадра а (фиг.2). Полученные разности суммируются по модулю, образуя матрицу F (матрица сумм абсолютных разностей для всех возможных смещений).
Mi,j, Ni,j - элементы внутри ограниченной области кадра а и б (фиг. 2) соответственно; i', j' - все возможные смещения от -d до +d; i1, i2 - границы области по вертикали; j1, j2 - границы области по горизонтали; Минимальный элемент матрицы соответствует наиболее вероятному смещению 


Знаки перед выражениями определяются выбором направления скорости. По найденным составляющим определяется полная ячейковая скорость слоя:
Угол α отклонения вектора полной ячейковой скорости ν от горизонтали рассчитывается как:
Так как направление вектора движения фрагмента облачного слоя обычно не совпадает с радиальной линией, связывающей фрагмент и центр кадра (фиг.3) необходимо знать проекцию полной ячейковой скорости на эту линию, которые рассчитываются по следующей формуле:
v=ν·cos(α-β),
где α - угол отклонения вектора скорости соответствующего слоя фрагмента, β - угол наклона радиальной линии, который определяется координатами центра фрагмента.
Приведенные выше расчеты проводятся для верхнего и нижнего слоя отдельно. В результате чего для верхнего и нижнего слоя определяются ячейковые скорости их проекций vвер.яч, vниж.яч.
Для каждого слоя определяется среднее значение энергетической яркости (радиационной температуры). По этим средним значениям согласно стандартной модели атмосферы Земли [4] (фиг.2) определяются ориентировочные высоты верхнего (Новер.) и нижнего (Нониж.) слоев и их высотная разность h.
h=Новер.-Нониж.
Высота НГО определяется по следующей формуле:
H=h·vвер.яч/(vниж.яч-vвер.яч).
Вывод последней формулы поясняется следующим примером.
Предположим, сканирующий радиометр фиксирует два облака, движущихся с одинаковой скоростью, но находящихся на разных высотах H, H+h (либо одно облако с нижней границей Н и верхней H+h). На фиг.1 эти облака изображены в разные моменты времени, соответствующие i и i+1 кадрам радиометра. Интересующие нас фрагменты кадров изображены в нижней части рисунка. При сравнении фрагментов двух кадров радиометра видно, что скорости проекций (υвер и υниж) верхнего и нижнего облака различны.
Пусть абсолютная скорость верхнего облака - v, а временной интервал между двумя кадрами равен t. Тогда KL=KH+v·t (фиг.1). За время t проекция верхнего облака проходит расстояние CC1=AC1-АС. Из подобия треугольников АОС и КОН следует:
AC=KH·H/(H+h)
Из подобия треугольников АОС и КОН следует:
AC1=KL·H/(H+h)=(KH+v·t)·H/(H+h)
CC1=AC1-AC=(KH+v·t)·H/(H+h)-KH·H/(H+h)=v·t·H/(H+h)
H/(H+h)=const. Обозначим k=H/(H+h) и перепишем равенство:
AC1=AC+k·v·t
Последнее уравнение соответствует равномерному движению проекции облака со скоростью v·H/(H+h).
Обозначим угол СОА за α, а угол BOA за β. Длина отрезка BB1 равна υниж·t, а длина отрезка CC1 равна υвер·t. Из геометрии видно:
ВС=H·(tg α-tg β)
CD=h·tg α
BD=BC+CD=H·(tg α-tg β)+h·tg α
B1C1=H·(tg C1OA-tg B1OA)
tg C1OA=AC1/H=(AC+CC1)/H=(H·tg α+υвер·t)/Н
tg B1OA=AB1/H=(AB+BB1)/H=(H·tg β+υниж·t)/Н
B1C1=H·tg α+υвер·t-H·tg β-υниж·t
C1D1=h·tg C1LD1
C1LD1=C1OA
C1D1=h·tg C1OA=h·tg α+h·υвер·t/H
B1D1=B1C1+C1D1=H·tg α+υвер·t-H·tg β-υниж·t+h·tg α+h·υвер·t/H
Отрезки BD и B1D1 равны, откуда:
H·(tg α-tg β)+h·tg α=H·tg α+υвер·t-H·tg β-υниж·t+h·tg α+h·υвер·t/H
После преобразования уравнение принимает вид:
υниж·t-υвер·t=h·υвер·t/H
h·υвер/H=υниж-υвер
Н=h·υвер/(υниж-υвер)
Скорость проекции (υ) линейно связана с ячейковой скоростью (vяч):
υ=vяч·1
где 1 - размер ячейки. Откуда:
H=h·vвер.яч·1/(vниж.яч·1-vвер.яч·1)=h·vвер.яч/(vниж.яч-vвер.яч)
Данный метод позволяет хорошо приблизиться к точному значению высоты НГО, поскольку зависимость высоты от энергетической яркости в области, где могут находиться облака, можно считать линейной. Ошибка в определении высоты (ξ) по яркости носит аддитивный характер, и при расчете высотной разности слоев она будет компенсироваться:
Hниж=Hниж.ист+ξ
Hвер=Hвер.ист+ξ
H=Hвер-Hниж=Hвер.ист+ξ-Hниж.ист-ξ=Hвер.ист-Hниж.ист
Для более точной оценки высоты нижней границы облачности с помощью этого метода есть несколько рекомендаций:
- Разбиение кадра на еще большее количество энергетических слоев (4, 5 и т.д.). При этом увеличится общее количество оценок высоты для каждого из них, а значит повысится точность определения НГО.
- Вместо двух кадров можно использовать большее количество пар соседних кадров. Для каждой пары рассчитывается высота нижней границы облачности. Усреднение этих результатов даст еще более точную оценку.
Использованные источники
1. Патент РФ №2321029, МПК G01W 1/00 на изобретение "Способ определения высоты, направления и скорости движения нижней границы облачности".
2. Патент РФ 2136016, МПК G01S 17/95, G01W 1/00, на изобретение "Светолокационный измеритель высоты нижней границы облаков".
3. Патент РФ №2331853, МПК G01J 3/06 на изобретение "Устройство распознавания форм облачности".
4. Международная стандартная атмосфера. Авиация: Энциклопедия. М.: Большая Российская Энциклопедия. Главный редактор Г.П.Свищев. 1994.
Изобретение относится к метеорологии, навигации и позволяет аппаратурно, в реальном масштабе времени определять высоту нижней границы облачности. Сущность изобретения: при помощи широкопанорамной автоматизированной сканирующей системы автоматически определяются наиболее контрастные участки, по которым определяется высота нижней границы облачности. При этом кадр, состоящий из M×N ячеек, разбивается на слои энергетической яркости. Пo скорости перемещения фрагмента облачного поля относительно ячеек (ячейковой скорости слоев) и высотной разности слоев, заданной по стандартной модели Земли, определяется высота нижней границы облачности. Технический результат - автоматизация определения высоты нижней границы облачности по смещению ее пространственной структуры излучения в реальном масштабе времени и расширение функциональных возможностей метеорологических наблюдений (например, дистанционное определение смерчей, опасных грозовых состояний облачности, тайфунов, оптической разведки движения летательных аппаратов как в дневное, так и в ночное время). 3 ил.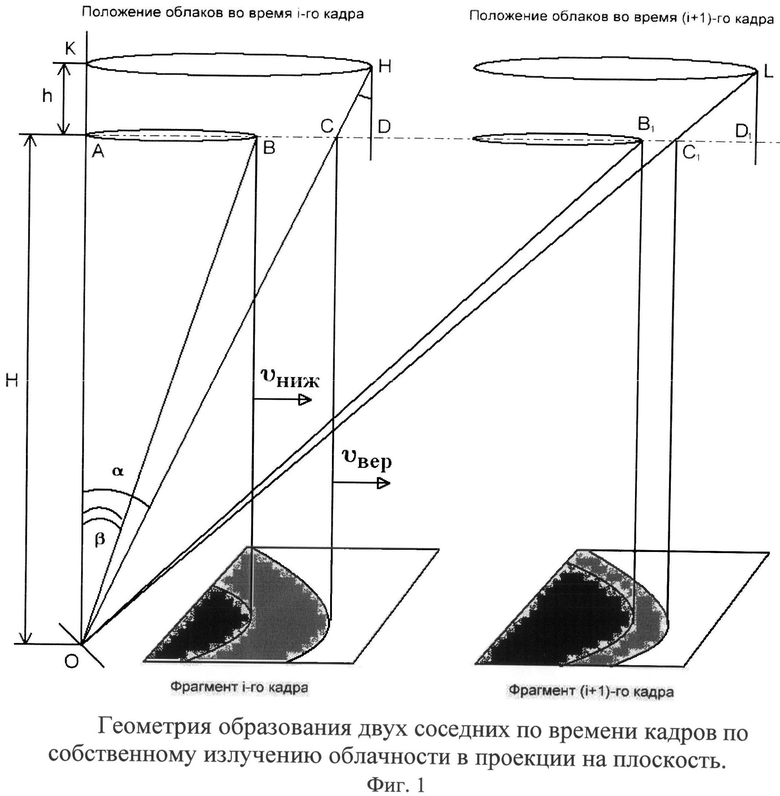
Способ определения высоты нижней границы облачности на интервале времени, по которому, посредством широконанорамной автоматизированной сканирующей системы, осуществляющей сканирование в диапазоне спектра собственного излучения поля облачности, программно определяются наиболее котрастные участки, в которых фрагменты облачных слоев сортируются по радиационной температуре, и по проекции слоев определяется их высотная разность и высота нижней границы облачности.
| RU 2009119462 А, 27.11.2010 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ОБЛАЧНЫХ СЛОЕВ И ОПРЕДЕЛЕНИЯ ВЫСОТЫ ИХ НИЖНЕЙ ГРАНИЦЫ | 1997 |
|
RU2154289C2 |
| US 6035710 А, 14.03.2000. | |||

