Изобретение относится к электротехнике, а именно к устройствам для торможения электродвигателей, и может быть использовано, в частности, в различных приводах горизонтального вращения, например в приводах корабельных антенн для плавной остановки в требуемом положении.
Известно устройство для торможения электропривода, содержащее электродвигатель, блок управления, блок торможения, элементы для обеспечения торможения (а.с. СССР №677029, кл. Н02Р 3/08, 1970 г.).
Это устройство осуществляет торможение электродвигателя противовключением при снятии сигнала управления, что исключает его использование при торможении электродвигателей, вращающих антенны со значительным весом и существенным моментом инерции. Резкая остановка при таком торможении может привести к поломкам как в двигателе и деталях, передающих вращение, так и в самой конструкции антенны.
Известно также устройство для торможения электропривода, содержащее источник питания, электродвигатель, блок управления, блок динамического торможения (а.с. СССР №978301, кл. Н02Р 3/12, 1981 г.).
Это устройство обеспечивает эффективное динамическое торможение электродвигателя после отключения источника питания, удерживая сигнал управления, что исключает его использование при торможении электродвигателей, вращающих объекты, которые при остановке имеют существенный момент инерции, обусловленный значительными габаритами, весом и сложностью конструкции. Это может привести к поломкам как в двигателе и деталях, передающих вращение, так и в самой конструкции антенны.
Наиболее близким аналогом (прототипом) является устройство торможения асинхронного двигателя, которое содержит трехфазный асинхронный двигатель, электромеханический тормоз, схему включения тормоза, схему формирования сигнала торможения, схему задержки включения электромеханического тормоза и три однофазных коммутатора. Частота вращения вала электродвигателя снижается за счет динамического торможения постоянным током перед включением тормоза, что значительно уменьшает нагрузку на тормоз, поскольку ему остается погасить энергию вращения на два прядка меньшую, чем в случае полного торможения. При этом уменьшается износ фрикционных поверхностей тормоза и увеличивает его ресурс, а также ресурс электродвигателя, работающего в повторно-кратковременном режиме. (Патент России №2280944, кл. Н01P 3/26, 2003 г.).
Однако наличие дополнительного источника питания постоянного тока и множество однофазных коммутаторов ведет к недостаточно высокой надежности в работе устройства и его усложнению. Вращающийся вал электродвигателя невозможно остановить торможением в требуемом определенном положении, хотя имеются сведения о начале и окончании импульса времени торможения Δt, что не позволяет включить тормоз с упреждением, а также использовать свободное вращение вала двигателя с нагрузкой для его остановки в заданном положении. Кроме того, невозможно обеспечить режим пониженной частоты вращения. Таким образом, к недостаткам следует отнести сложность устройства, а также невозможность поступления импульса начала торможения с упреждением включения тормоза и невозможность фиксации в требуемом положении.
Задачей, на решение которой направлено предлагаемое изобретение, является создание устройства торможения электродвигателя, позволяющего обеспечить режим пониженной частоты вращения, поступление импульса начала торможения с упреждением и возможность фиксации в требуемом положении с одновременным его упрощением.
Техническими результатами при реализации изобретения, в частности, являются упрощение устройства торможения электродвигателя, обеспечение режима пониженной частоты вращения, поступления импульса начала торможения с упреждением, обеспечение возможности фиксации в требуемом положении, отсутствие механического удара, увеличение надежности, уменьшение износа трущихся частей.
Влияние на достижение указанных технических результатов оказывают следующие существенные признаки. В устройстве торможения электродвигателя, содержащем коммутатор сети питания, электродвигатель, вращаемый объект, электромагнитный тормоз с катушкой, схему формирования сигнала торможения, схему включения тормоза, однофазный коммутатор включения и однофазный коммутатор выключения, имеется полупроводниковый преобразователь частоты и инкрементный датчик курсового угла, причем вывод однофазного коммутатора включения соединен с первым входом схемы включения тормоза, первый вывод схемы включения тормоза соединен с первым входом полупроводникового преобразователя частоты, первый вывод полупроводникового преобразователя частоты соединен с первым входом электродвигателя, вывод электродвигателя через трансмиссию, имеющую вывод на вращаемый объект, соединен с входом инкрементного датчика курсового угла, вывод инкрементного датчика курсового угла соединен с входом схемы формирования сигнала торможения, вывод схемы формирования сигнала торможения соединен с вторым входом схемы включения тормоза, при этом вывод однофазного коммутатора выключения соединен с третьим входом схемы включения тормоза, второй вывод схемы включения тормоза соединен с входом электромагнитного тормоза с катушкой и с вторым входом полупроводникового преобразователя частоты, первый вывод электромагнитного тормоза с катушкой соединен с вторым входом электродвигателя, а второй вывод электромагнитного тормоза с катушкой соединен с третьим входом полупроводникового преобразователя частоты, второй вывод полупроводникового преобразователя частоты соединен с четвертым входом схемы включения тормоза, причем вывод коммутатора сети питания соединен с четвертым входом полупроводникового преобразователя частоты. А трансмиссия выполнена в виде двух редукторов, при этом вывод электродвигателя соединен с входом первого редуктора, первый вывод первого редуктора соединен с входом вращаемого объекта, второй вывод первого редуктора соединен с входом второго редуктора, а вывод второго редуктора соединен с входом инкрементного датчика курсового угла.
Отличительными признаками в предлагаемом устройстве торможения электродвигателя от прототипа является наличие инкрементного датчика курсового угла, полупроводникового преобразователя частоты и выполнение связей между элементами функциональной схемы устройства торможения электродвигателя.
На чертеже представлена функциональная схема устройства торможения электродвигателя.
Устройство торможения электродвигателя состоит из полупроводникового преобразователя 1 частоты, электродвигателя 2, инкрементного датчика 3 курсового угла, схемы 4 формирования сигнала торможения, схемы 5 включения тормоза, электромагнитного тормоза 6 с катушкой, однофазного коммутатора 7 выключения, однофазного коммутатора 8 включения. Вал электродвигателя 2 соединен с первым редуктором 9, который соединен со вторым редуктором 10 для передачи данных о вращении на инкрементный датчик 3 курсового угла и для передачи вращения на вал вращаемого объекта 11. Подключение электродвигателя 2 к коммутатору 12 сети питания с фазами А, В, С силовой сети осуществляется через полупроводниковый преобразователь 1 частоты. Первый редуктор 9 и второй редуктор 10 образуют трансмиссию 13.
Однофазный коммутатор выключения 7 предназначен для передачи команды на торможение электродвигателя 2 и остановки вращаемого объекта 11, в нашем случае корабельной антенны, в требуемом положении. Он представляет собой кнопочный выключатель (0-ВЫКЛ) и вынесен на пульт управления корабля. Однофазный коммутатор включения 8 предназначен для передачи команды на включение электродвигателя 2, в результате которой вращаемый объект 11 приводится в горизонтальное вращение. Он представляет собой кнопочный выключатель (ВКЛ) и вынесен на пульт управления корабля. Таким образом, личный состав корабля имеет возможность подавать команды на включение и выключение электродвигателя 2 привода горизонтального вращения корабельной антенны с пульта управления корабля. Однофазный коммутатор выключения 7 и однофазный коммутатор включения 8 имеют по одному выводу и соединены со схемой 5 включения тормоза. В схеме 5 включения тормоза имеются четыре входа и два вывода. Предусмотрено соединение схемы 5 включения тормоза с полупроводниковым преобразователем 1 частоты для передачи команды на управление частотой вращения и соединение с полупроводниковым преобразователем 1 частоты и с электромагнитным тормозом 6 для передачи команды на торможение. У полупроводникового преобразователя 1 частоты имеются три входа. Полупроводниковый преобразователь 1 частоты выполняет ряд функций: управление частотой вращения ротора электродвигателя 2, контроль частоты его вращения, включение-выключение электродвигателя 2, комплект действий по защите при разгоне и торможении электродвигателя 2. Предусмотрено соединение полупроводникового преобразователя 1 частоты через первый вывод с первым входом электродвигателя 2 для передачи ему напряжения с трех фаз. Первый вход электродвигателя 2 предусмотрен для поступления питания с трех фаз. Кроме того, полупроводниковый преобразователь 1 частоты имеет еще один вывод - второй. Он соединен со схемой 5 включения тормоза для передачи на него информации о вырабатывании в полупроводниковом преобразователе 1 частоты контрольного сигнала «fп» при достижении заданной частоты вращения ротора электродвигателя 2 по мере ее уменьшения. Полупроводниковый преобразователь 1 частоты также соединен с коммутатором 12 сети питания, который имеет вывод трех фаз сети питания, и имеет вход трех фаз, который является четвертым входом, и вывод трех фаз, который является первым выводом. В электродвигателе 2 предусмотрен второй вход. Электродвигатель 2 имеет один вывод. В примере исполнения он представлен трехфазным и имеет ротор. Электромагнитный тормоз 6 с катушкой имеет один вход и два вывода. Инкрементный датчик 3 курсового угла и схема 4 формирования сигнала торможения имеют по одному входу и по одному выводу. Вывод электродвигателя 2 проходит через трансмиссию 13 на вход инкрементного датчика 3 курсового угла. Соединение первого редуктора 9 и второго редуктора 10 в трансмиссии 13 необходимо для передачи измененной частоты вращения электродвигателя 2 на вращаемый объект 11. При этом указанные связи обеспечивают передачу вращения через первый редуктор 9 на второй редуктор 10, а второй редуктор через первый вывод обеспечивает передачу данных о вращении вала электродвигателя 2 на вход инкрементного датчика 3 курсового угла. Кроме того, первый редуктор 9 имеет второй выход, который соединен с валом вращаемого объекта 11. Ротор электродвигателя 2 соединен с первым редуктором 9 для передачи крутящего момента на вращаемый объект 11. Одновременно первый редуктор 9 соединен со вторым редуктором 10 для передачи вращения с частотой, равной по своей величине частоте вращения вращаемого объекта 11. При соединении со вторым редуктором 10 инкрементный датчик 3 курсового угла обеспечивает возможность регистрации угла поворота вращаемого объекта 11 и за каждый оборот вращаемого объекта 11 выполняет функцию вырабатывания заданного количества электрических импульсов. При этом предусмотрена регистрация за каждый оборот только одного вырабатываемого импульса при прохождении положения «0», которое соответствует заданному положению вращаемого объекта 11. Инкрементный датчик 3 курсового угла соединен со схемой 4 формирования сигнала торможения. Схема 4 формирования сигнала торможения соединена с схемой 5 включения тормоза. Предусмотрено соединение электромагнитного тормоза 6 со схемой 5 включения тормоза. Это соединение выполнено как продолжение соединения схемы 5 включения тормоза с полупроводниковым преобразователем 1 частоты при передаче команды на торможение. Электромагнитный тормоз 6 с катушкой установлен с возможностью воздействия на ротор электродвигателя 2 посредством его торможения и фиксации. Предусмотрено взаимодействие фрикционных колодок электромагнитного тормоза 6 с валом ротора электродвигателя 2 в случае поступления команды на торможение. Сам электромагнитный тормоз 6 имеет катушку с большой индуктивностью и небольшим активным электрическим сопротивлением. Он соединен с полупроводниковым преобразователем 1 частоты для передачи сигнала при поступлении команды на торможение через схему 5 включения тормоза от однофазного коммутатора 7 выключения. Таким образом, в устройстве для торможения электродвигателя вывод однофазного коммутатора 8 включения соединен с первым входом схемы 5 включения тормоза, первый вывод схемы 5 включения тормоза соединен с первым входом полупроводникового преобразователя 1 частоты, первый вывод полупроводникового преобразователя 1 частоты соединен с первым входом электродвигателя 2. Вывод электродвигателя 2 через трансмиссию 13, имеющую вывод на вращаемый объект 11, соединен с входом инкрементного датчика 3 курсового угла, а вывод инкрементного датчика 3 курсового угла соединен с входом схемы 4 формирования сигнала торможения. Вывод схемы 4 формирования сигнала торможения соединен с вторым входом схемы 5 включения тормоза, при этом вывод однофазного коммутатора 7 выключения соединен с третьим входом схемы 5 включения тормоза. Второй вывод схемы 5 включения тормоза соединен с входом электромагнитного тормоза 6 с катушкой и с вторым входом полупроводникового преобразователя 1 частоты. Первый вывод электромагнитного тормоза 6 с катушкой соединен с вторым входом электродвигателя 2, а второй вывод электромагнитного тормоза 6 с катушкой соединен с третьим входом полупроводникового преобразователя частоты 1. Второй вывод полупроводникового преобразователя 1 частоты соединен с четвертым входом схемы 5 включения тормоза. Вывод коммутатора 12 сети питания соединен с четвертым входом полупроводникового преобразователя 1 частоты. А трансмиссия 13 выполнена в виде соединенных двух редукторов: первого редуктора 9 и второго редуктора 10. Вывод электродвигателя 2 соединен с входом первого редуктора 9, первый вывод первого редуктора 9 соединен с входом вращаемого объекта 11, второй вывод первого редуктора 9 соединен с входом второго редуктора 10, а вывод второго редуктора 10 соединен с входом инкрементного датчика 3 курсового угла.
Устройство для торможения электродвигателя антенны работает следующим образом.
При поступлении от однофазного коммутатора включения 8 команды включения (ВКЛ) на схему включения тормоза 5 в ней вырабатывается сигнал на управление электромагнитным тормозом 6 на расторможение ротора электродвигателя 2 для начала вращения вращаемого объекта 11. Ротор электродвигателя 2 передает вращение на первый редуктор 9 трансмиссии 13. Одновременно передается вращение на второй редуктор 10, который передает вращение для снятия сигнала на инкрементный датчик 3 курсового угла с частотой, равной по своей величине частоте вращения вращаемого объекта 11. Во время вращения ротора электродвигателя 2 инкрементный датчик 3 курсового угла за каждый оборот его ротора вырабатывает заданное количество электрических импульсов. При этом за каждый оборот вырабатывается только один импульс при прохождении положения «0», которое соответствует заданному положению вращаемого объекта 11, в нашем случае положение «0» соответствует походному положению корабельной антенны, перпендикулярно направлению движения, устанавливаемому относительно носа корабля.
Таким образом, при выполнении команды включения от однофазного коммутатора включения 8 вращаемый объект 11 приводится в горизонтальное вращение.
Для остановки горизонтального вращения вращаемого объекта 11 в заданном положении «0», то есть в нашем случае для установки корабельной антенны перпендикулярно направлению движения относительно носа корабля, необходимо остановить электродвигатель в положении «0», предусмотрена следующая последовательность выполнения команды торможения (0-ВЫКЛ).
При поступлении сигнала от однофазного коммутатора выключения 7 на остановку антенны в положении «0» поступает сигнал на схему 5 включения тормоза, который вырабатывает сигнал, управляющий частотой вращения, и передает его на полупроводниковый преобразователь частоты 1. Полупроводниковый преобразователь частоты 1 осуществляет плавное понижение частоты вращения ротора электродвигателя 2 до значения, при котором не может произойти поломок электромагнитного тормоза 6 с катушкой, а также вращаемого объекта 11, первого редуктора 9 и второго редуктора 10. Полупроводниковый преобразователь частоты 1 контролирует момент достижения этого значения. Схема 4 формирования сигнала торможения выдает на схему 5 включения тормоза упрежденный электрический импульс относительно положения «0», вырабатываемый из количества импульсов инкрементного датчика 3 курсового угла в момент времени, который определяется опытным путем в зависимости от момента инерции вращаемого объекта 11 и времени задержки электромагнитного тормоза 6 с катушкой. Упрежденный электрический импульс дает команду на начало торможения. При достижении заданной частоты вращения ротора электродвигателя 2 полупроводниковый преобразователь частоты 1 вырабатывает контрольный сигнал «fп» для схемы 5 включения тормоза. В тот момент, когда в схеме 5 включения тормоза совпадет сигнал «fп» и упрежденный электрический импульс относительно положения «0», поступающий из схемы 4 формирования сигнала торможения, схема 5 включения тормоза вырабатывает сигнал одновременного отключения полупроводникового преобразователя частоты 1 и задействования электромагнитного тормоза 6 для торможения. Полупроводниковый преобразователь частоты 1 отключает электродвигатель 2 от фаз А, В, С силовой сети в точке упрежденного электрического импульса, однако электромагнитный тормоз 6 затормаживает ротор электродвигателя 2 не сразу, а именно в точке, соответствующей положению «0». Такое торможение происходит за счет задержки подаваемого сигнала на фрикционные колодки электромагнитного тормоза 6 для взаимодействия с валом ротора электродвигателя из-за наличия большой индуктивности и небольшого активного электрического сопротивления катушки электромагнитного тормоза 2. В течение времени запаздывания торможения вращаемый объект 11 снижает частоту вращения почти до полной ее остановки с учетом своей значительной инерционности.
Таким образом, при выполнении команды «0-ВЫКЛ» происходит плавная остановка вращаемого объекта 11 и фиксация его электромагнитным тормозом 6 в заданном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2280944C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ИСКУССТВЕННЫМ ПОКРЫТИЕМ | 2007 |
|
RU2352918C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 1992 |
|
RU2022824C1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2022 |
|
RU2788578C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2076449C1 |
| Электропривод переменного тока | 1989 |
|
SU1676057A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2395410C1 |
Изобретение относится к области электротехники торможения и может быть использовано в различных приводах горизонтального вращения, например в приводах корабельных антенн для плавной остановки в требуемом положении. Устройство торможения электродвигателя содержит полупроводниковый преобразователь частоты и инкрементный датчик курсового угла. Вывод полупроводникового преобразователя частоты соединен с входом электродвигателя, вывод электродвигателя через трансмиссию, имеющую вывод на вращаемый объект, соединен с входом инкрементного датчика курсового угла. Вывод инкрементного датчика курсового угла соединен с входом схемы формирования сигнала торможения. Вход схемы формирования сигнала торможения соединен с входом схемы включения тормоза. Техническим результатом является обеспечение режима пониженной частоты вращения, возможность фиксации в требуемом положении, поступление импульса начала торможения с упреждением, исключение механического удара, увеличение надежности, упрощение и уменьшение износа трущихся частей. 1 з.п. ф-лы, 1 ил.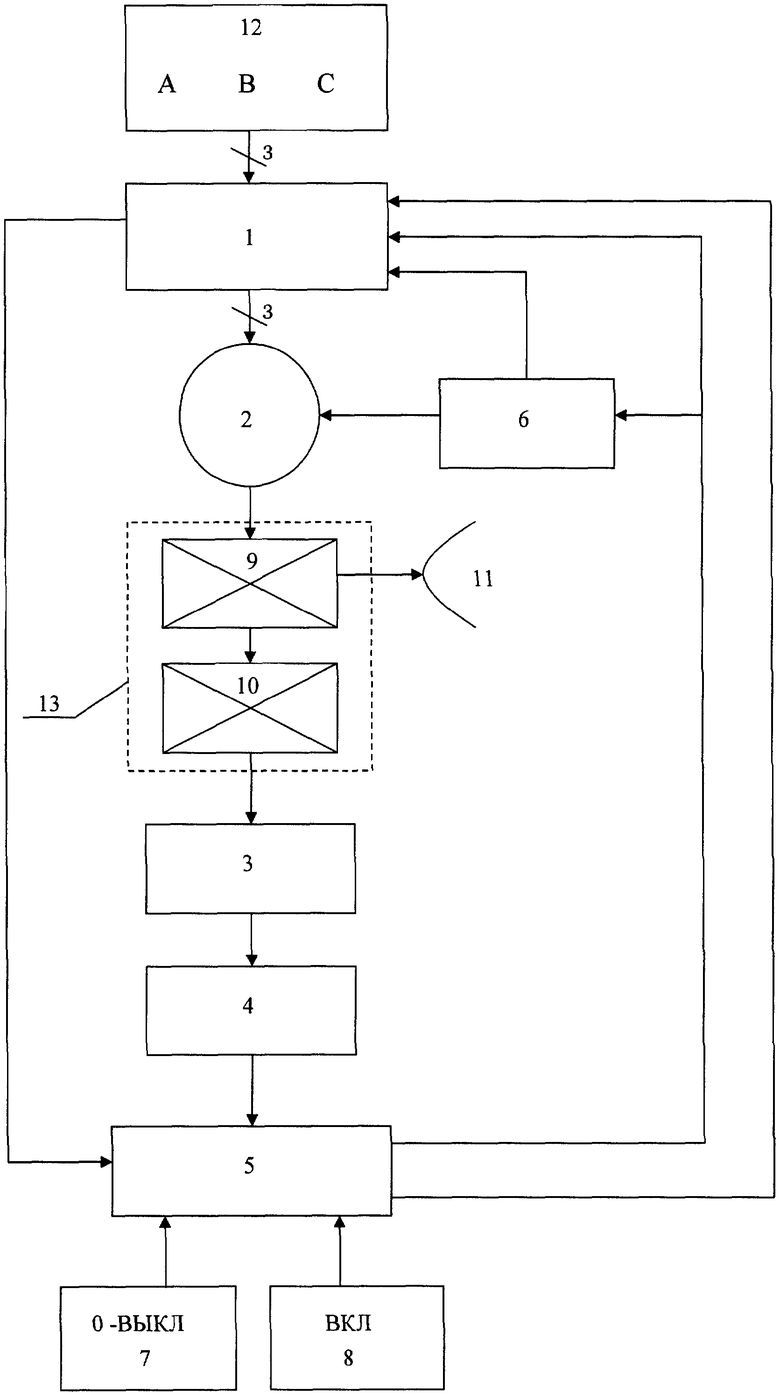
| УСТРОЙСТВО ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2280944C1 |
| УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 1996 |
|
RU2152123C1 |
| Устройство для торможения асинхронного электродвигателя | 1989 |
|
SU1676051A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| Устройство для использования энергии волн | 1986 |
|
SU1390432A1 |
| US 2004145328 A1, 29.07.2004 | |||
| EP 0259656 A1, 16.03.1988 | |||
| Способ изготокления многослойных резиновых деталей низа обуви | 1938 |
|
SU55963A1 |

