Изобретение относится к способам навигации, посадки и взлета вертолета или другого летательного аппарата с посадкой вертолетного типа (далее - ЛА), при котором используют бортовой радиолокатор посадки (РЛП) мм-диапазона для осуществления поиска, обнаружения и идентификации места посадки (МП) ЛА, например морской буровой установки (МБУ), определения местоположения ЛА относительно МП и его вертолетной площадки (ВП), захода на МП и самой посадки в сложных метеоусловиях и при плохой видимости.
Для привода ЛА к МП в настоящее время широко используются радиомаяки (РМ). Но, как правило, точность определения местоположения ЛА в этих случаях невелика и не соответствует задачам навигации при посадке в сложных метеоусловиях и плохой видимости.
Наиболее широкое применение находят спутниковые навигационные системы (СНС). Для увеличения точности навигации, что необходимо для систем посадки, последнее время предлагаются усовершенствованные СНС, такие как спутниковый радионавигационный комплекс (СРНК), разработанный для морской авиации во ФГУП «Пилотажно-исследовательский центр» (ПИЦ). СРНК представляет собой навигационный комплекс нового типа, который должен сменить существующие инерциальные (когда компьютер вычисляет координаты самолета по движениям после взлета) и спутниковые системы. В соответствии с http://www.sdelanounas.ru/blogs/25635/ в комплексе используется так называемый относительный режим спутниковой навигации (ГЛОНАСС и GPS), когда сигналы с орбиты принимает не один, а два самолета, которые затем в режиме онлайн обмениваются координатами друг с другом. Двойное позиционирование дает точность координат в пределах 10 см. Поэтому пилот может «вслепую» вести самолет на посадку вплоть до касания полосы.
Однако во многих случаях при наличии помех и при работе, например, в условиях Крайнего Севера СНС не могут обеспечить надежное решение задач навигации, выхода ЛА к месту посадки и самой посадки пилотируемых и беспилотных ЛА на необорудованные или слабо оборудованные посадочные площадки, в частности, самолетов на посадочные полосы и вертолетов на ВП. В связи с большим количеством малооборудованных аэродромов и ВП во всем мире остро стоит задача создания относительно дешевых автономных бортовых систем навигации с высокой точностью, обеспечивающих безопасный и, вместе с тем, экономичный выход ЛА к месту назначения и безопасный и психологически комфортный для пилотов режим приземления и взлета даже в сложных метеоусловиях. О большом интересе к этим вопросам в США, в частности, свидетельствует разработка патентов на изобретения в области автономных и полуавтономных (гибридных, включающих в себя GPS) посадочных систем, зарегистрированных за последние 10-20 лет такими крупными фирмами как Rockwell Int. Corp.; Honeywell Int. Inc.; Airbus (FR); Winged Systems Corp.
Принципиальным недостатком всех этих систем является то, что они не дают пилоту реальной картинки места посадки - его оптического (визуального) или радиолокационного изображения (РЛИ). Названные посадочные системы обеспечивают пилотов информацией о полете через показания приборов. Иногда системы посадки дают виртуальное (синтезированное) изображение места посадки. Но и то, и другое не гарантирует достоверности выдаваемой информации, что снижает доверие к этой информации со стороны экипажа.
Психологическую уверенность в достоверности получаемой информации могут дать изображения, в частности, тепловизионные, телевизионные и др. приборы в видимом и ИК диапазонах (см., например, http://www.biplanecentre.ru/articles/page/22/). Однако эти приборы имеют ограничения по условиям применения. В этом смысле практически всепогодным и работающим даже в условиях отсутствия видимости является радиолокаторы малых дальностей.
Например, на авиасалоне МАКС-2011 компания ОАО «НПП «Радар ммс» представила систему «Видимость-2000». Система обеспечивает взлет, полет и посадку самолетов в условиях отсутствия оптической видимости, предоставляя информацию с высокой точностью обо всех параметрах, необходимых для успешного руления, причаливания к терминалам, информацию о состоянии взлетно-посадочной полосы. Модернизированная интеллектуальная система посадки с функцией синтетического зрения «Видимость-2000» позволяет обнаруживать, идентифицировать МП и в ручном, полуавтоматическом или автоматическом режиме эффективно совершить посадку в неблагоприятных погодных условиях даже на необорудованные аэродромы. Ее применение позволяет при заходе на посадку формировать виртуальную глиссаду с отображением всей необходимой информации на лобовом стекле кабины пилота.
ОАО «НПП «Радар ммс» представлена также разработка мини РЛС обеспечения посадки 3 мм диапазона. Благодаря ей возможно всепогодное круглосуточное обнаружение МП и опасных предметов в районе посадки/взлета с получением информации высокой точности о взаимном расположении вертолета, земной поверхности, МП и наземных объектов.
Следует подчеркнуть, что локационные системы выдают экипажу вертолета объективную достоверную информацию, что обеспечивает экипажу психологически комфортные условия пилотирования. Но при этом важно, чтобы информирование было, по возможности, наиболее полным, с одной стороны, и было эффективно задействовано в самом процессе управления, с другой.
Эти задачи частично решаются в предлагаемом способе навигации.
В качестве прототипа можно рассматривать способ навигации, при котором с помощью радиолокатора осуществляют поиск, обнаружение и идентификацию МП ЛА, например, в виде МБУ, определяют местоположения ЛА относительно МП и его ВП и затем используют получаемую информацию для визуального или автоматического пилотирования ЛА, в том числе в сложных метеоусловиях и при плохой видимости.
Задачей изобретения является разработка способа навигации, позволяющего, основываясь на данных от бортового РЛП, решать задачи безопасной навигации вертолета как при подходе к МП, так и при «слепой» посадке, обеспечивая при этом экипажу комфортные условия пилотирования, основанные на высокой информативности и уверенности в достоверности получаемой информации.
Сущность предлагаемого способа навигации, посадки и взлета вертолета (далее - ЛА) состоит в том, что используют бортовой радиолокатор посадки (РЛП) мм-диапазона, по данным которого формируют радиолокационное изображение (РЛИ), отображаемое, например, на мониторе многофункционального индикатора в кабине ЛА, и осуществляют поиск, обнаружение и идентификацию места посадки (МП) ЛА, например морской буровой установки (МБУ), определяют местоположение МП и его вертолетной площадки (ВП) относительно ЛА и осуществляют навигацию ЛА, при этом при работе РЛП в режиме поиска за счет сканирования реальным лучом антенны при вхождении объекта - «кандидата» на МП в зону поиска его обнаруживают и переводят РЛП в режим «Останов», при котором осуществляют автоматическое сопровождение (АС) точки сопровождения (ТС) - точки на поверхности земли, соответствующей на момент перехода в режим «Останов» априорно выбранной точке на РЛИ, так что при движении ЛА лоцируется и формируется РЛИ одного и того же участка поверхности, а объект РЛИ, совпадающий с ТС, не перемещается по монитору, далее на РЛИ совмещают курсор с изображением «кандидата» и, меняя ТС, устанавливают АС этого «кандидата», затем, при необходимости получения дополнительных данных о «кандидате» и его идентификации, РЛП переводят в режим локации с синтезированием антенной решетки (режим САР), по результатам которого формируют детальное РЛИ МП с высоким разрешением, по детальному РЛИ проводят идентификации лоцируемого «кандидата» и, если обнаруженный «кандидат» не идентифицируется как искомое МП, то осуществляют возврат в режим поиска, а в случае идентификации «кандидата» определяют по этому РЛИ местоположение его ВП и ориентацию ВП и МП относительно ЛА, проводят оценку возможности и определяют траекторию безопасного захода на посадку на ВП, и далее осуществляют полет по выбранной траектории в автоматизированном или ручном режиме, контролируя взаимное положение МП и ЛА по РЛИ, непрерывно формируемому по данным РЛП в режиме реального луча и при АС ТС, совмещенной сначала с МП, а затем с его ВП; при этом в автоматизированном режиме полет осуществляют по автопилоту в ТС, а при подлете к ВП формируют на РЛИ точку проекции (ТП) и линию проекции (ЛП) на горизонтальную плоскость соответственно выбранной точки ЛА, например антенны РЛП, и его строительной оси и, управляя вектором скорости ЛА, совершают зависание ЛА над ВП и его посадку, добиваясь в режиме ручного визуального или автоматического управления вертолетом совмещения на РЛИ ТП и ЛП с точкой посадки ВП (ТПВП) и линией посадки ВП (ЛПВП), характеризующих место посадки ЛА на ВП и направление его строительной оси.
При этом АС выбранной ТС осуществляют путем расчета изменяющихся во времени наклонной дальности, азимута и угла места ТС относительно фазового центра антенны РЛП, исходя из имеющихся на борту текущих оценок взаимного положения ЛА и ТС, вектора скорости и высоты полета ЛА, и по результатам расчета изменяют направление и дальность лоцирования РЛП и соответственно учитывают это при формировании РЛИ и траектории полета ЛА на автопилоте.
Кроме того, для осуществления режима САР сначала ЛА переводят в режим равномерного прямолинейного полета с курсовым углом «кандидата» не менее 15 град., в РЛП отключают механическое сканирование антенной и используют режим АС ТС, совпадающей с «кандидатом» на МП, выбирают параметры лоцирования и формирования детального РЛИ, затем лоцируют МП на интервале синтезирования и по результатам лоцирования формируют детальное РЛИ.
При этом, если при АС ТС на экране монитора наблюдается движение РЛИ в ТС, то проводят корректировку оценки вектора скорости, добиваясь, чтобы сопровождаемый объект, совпадающий с ТС, оставался неподвижным на РЛИ, и, при необходимости, дополнительно корректируя его положение на РЛИ, наводя курсор на нужную точку и уточняя тем самым ТС.
Для получения на РЛИ ВП изображений ТПВП и ЛПВП на ней устанавливают отражающие маркеры, имеющие характерный вид, позволяющий пилоту по РЛИ ВП определять положение ЛА относительно этих ТПВП и ЛПВП.
При этом для обеспечения в РЛП лоцирования в требуемом направлении при появлении у ЛА крена и тангажа текущие значения отклонения вертолета от горизонтального положения, полученные, например, с помощью датчиков крена и тангажа, учитывают при формировании лучей антенны РЛП.
Технический результат применения предлагаемого способа навигации, посадки и взлета вертолета заключается в обеспечении всепогодного и психологически комфортного для экипажа вертолета (или операторов беспилотным ЛА) безопасного пилотирования ЛА на всех этапах его посадки и взлета, в том числе, в сложных метеоусловиях и при плохой видимости, основанного на расширении и более полном использовании информации от бортового РЛП, ее адаптации к текущим задачам пилотирования.
Перечень фигур
На фиг. 1 изображена модель морской буровой установки.
На фиг. 2 изображено РЛИ, полученное при моделировании режима РЛЧ при обнаружении морской буровой установки на дальности порядка 2700 м.
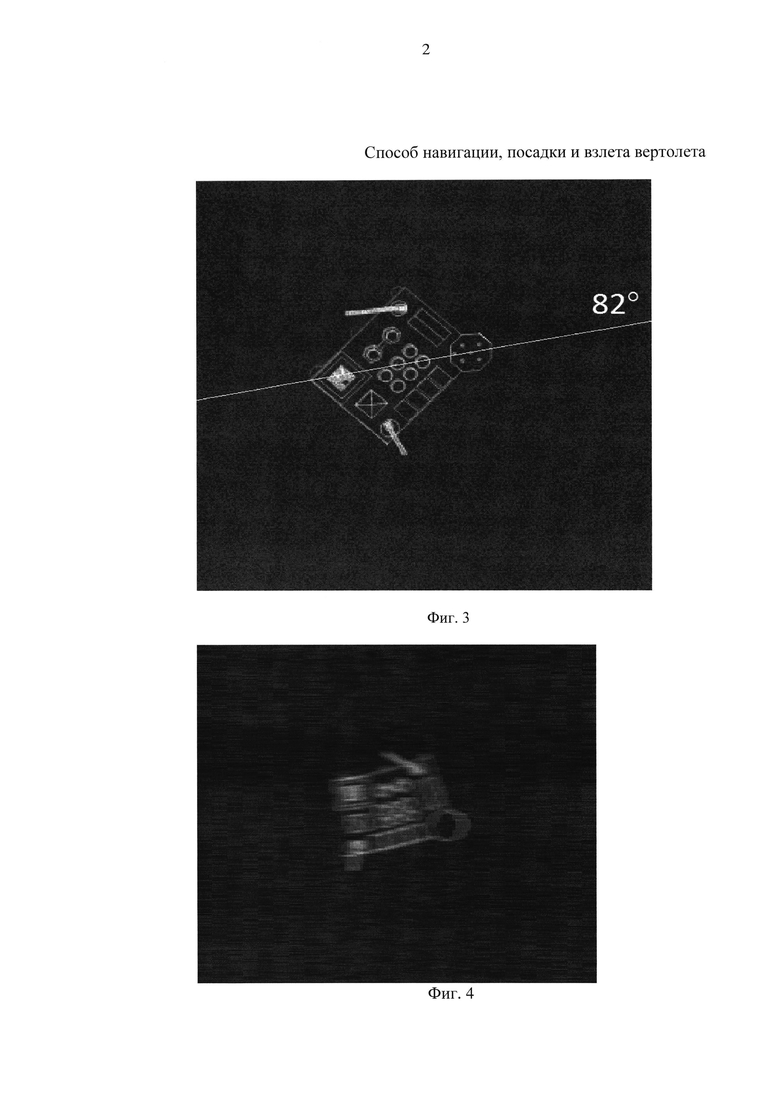
На фиг. 3 изображено РЛИ морской буровой установки в режиме САР.
На фиг. 4 изображено РЛИ при моделировании режима реального луча на дальности 800 м до МБУ.
На фиг. 5 изображено РЛИ МБУ при моделировании работы РЛП в режиме реального луча на дальности 300 м после выхода вертолета в сектор безопасной посадки.
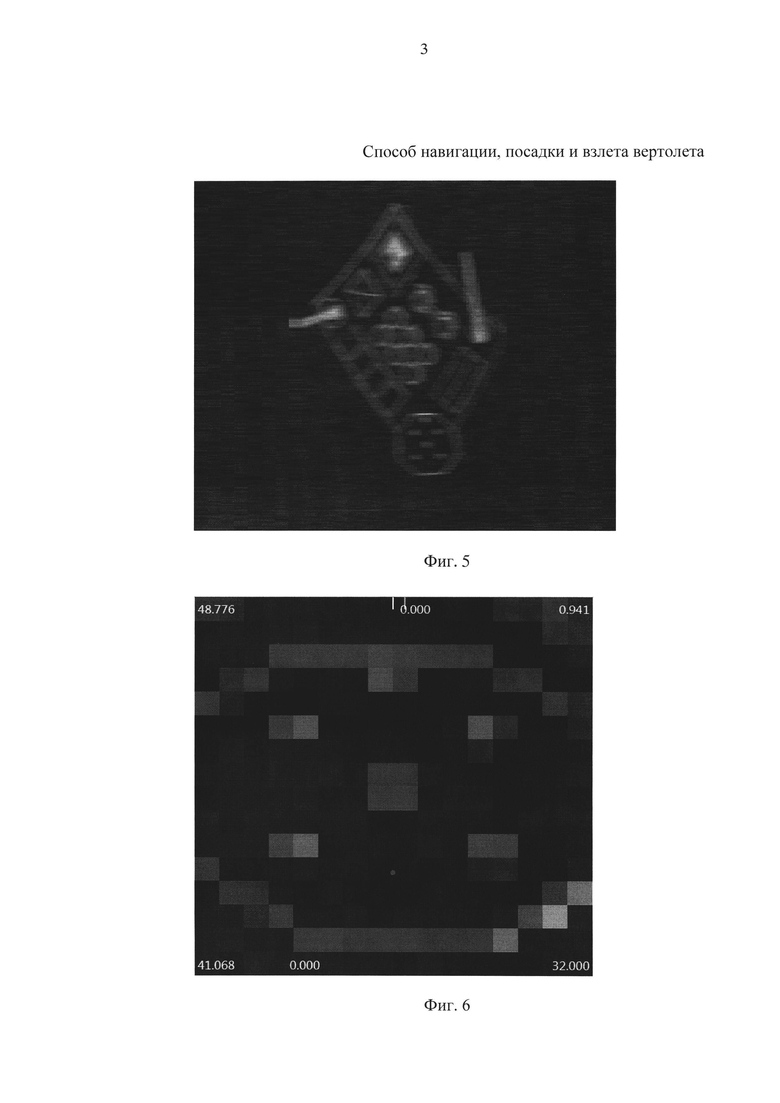
На фиг. 6 изображено РЛИ МБУ и ее посадочной площадки с отображением на РЛИ красной точкой проекции на плоскость ВП «центра» вертолета, например расположения антенны РЛП, при моделировании работы РЛП в режиме реального луча при высоте ЛА над ВП 30 м.
При подлете вертолета к МП в РЛП, как правило, за счет сканирования реальным лучом (лучами) антенны организуется обзор некоторой зоны местности. По дальности эта зона определяется максимальной дальностью работы РЛП и зоной просмотра по дальности. По углам - сектором механического сканирования антенной и количеством и шириной одновременно формируемых лепестков диаграммы направленности (ДН) антенны РЛП. При этом осуществляют поиск и обнаружение МП, просмотр окружающей наземной (надводной) обстановки, а также возможно обнаружение маловысотных воздушных объектов, могущих помешать полету вертолета. По данным лоцирования формируется РЛИ поверхности и объектов, попадающих в зону обзора с разрешением, определяемым по дальности полосой зондирующего сигнала, а по азимуту - шириной одного луча антенны РЛП. Это РЛИ выводится на индикатор в кабине вертолета или на рабочем месте оператора БПЛА.
При приближении вертолета к МП на максимальную дальность работы РЛП на РЛИ появляется РЛИ МП, которое перемещается по РЛИ в соответствии с движением вертолета. Для исключения этого перемещения и стабилизации изображения включают режим «Останов», при котором используется АС ТС. АС ТС характеризуется тем, что РЛП переходит в сопровождение этой точки по дальности и по углам, а положение выбранной ТС на РЛИ стабилизируется (остается неизменным при движении ЛА). Это сопровождение может быть достигнуто разными способами, в том числе за счет компенсации изменения дальности и угла визирования ТС при движении вертолета за счет знания его вектора скорости. В режиме «Останов» используется АС заранее выбранной точки РЛИ, например, соответствующий центральной точке на максимальной дальности РЛИ.
Останов РЛИ позволяет оператору более внимательно проанализировать получаемое РЛИ «кандидата» на искомое МП, точно навестись на него, например, с помощью курсора и, тем самым, выбрать новую ТС и дать команду на ее сопровождение.
По этой команде автоматически центр лоцируемой РЛП зоны (по дальности, азимуту и углу места) и центр РЛИ на экране монитора совмещают с ТС и удерживают это совмещение при движении ЛА. При этом лоцирование осуществляется в режиме реального луча.
При необходимости подтверждения, что обнаруженный объект действительно является искомым МП, для его идентификации и определения ориентации МП и его ВП относительно ЛА проводится режим ситезированной антенной решетки (САР).
При выдаче оператором команды на получение детального РЛИ в режиме САР возможно совмещение двух режимов работы РЛП: непрерывного лоцирования реальным лучом (РЛЧ) и однократного просмотра выбранного объекта (ТС) в режиме САР. Для этого устанавливают курсовой угол на выбранный объект не меньше 15-25 град., выбирают разрешение, например, δR=1 м. Антенна в двух плоскостях за счет механического разворота переводится в направление на ТС. Механическое сканирование отключается. На фиг. 1 представлена трехмерная модель морской буровой установки (МБУ), используемая при моделировании, а на фиг. 2 - РЛИ, полученное при моделировании режима РЛЧ при обнаружении. На фиг. 3 представлено РЛИ той же МБУ в режиме САР, где также показана определенная по РЛИ ориентация ВП (направление центра сектора безопасного захода на посадку). При этом в режиме РЛЧ разрешение по азимуту было 2 градуса, что на дальности 2.5 км составляет примерно 83 м, а в режиме САР разрешение по обеим координатам на той же дальности составляло 1 м. При таком разрешении в режиме САР отчетливо видна ВП с маркерами на ней.
При полете сопровождение ТС осуществляется путем расчета текущего положения МБУ относительно ЛА, полученное, исходя из знания вектора скорости ЛА. Максимально возьожный сектор обзора в отсутствии режима САР определяется суммарной шириной многолучевой ДН (электронным сканированием) антенны РЛП и возможностями механического сканирования этой антенной (с уменьшением сектора сканирования из-за разворота антенны от направления строительной оси ЛА в сторону на ТС). В режиме САР сектор обзора определяется только возможностями многолучевой ДН. При этом при проведении режима САР накладываются дополнительные ограничения на траекторию полета вертолета: на интервале синтезирования кроме полета при курсовом угле ТС более 15 град., также желательно выдерживание равномерного прямолинейного полета.
По результатам оценки взаимного расположения вертолета и МБУ и ориентации МБУ разрабатывается вариант полета вертолета к МБУ и его захода на посадку с учетом сектора безопасного захода на ВП. При автолпилоте вертолет летит по выбранной траектории, но пилот может изменять полет за счет изменения вектора скорости вертолета. Во всех режимах пилот контролирует полет ЛА по РЛИ и отображаемым, например, на мониторе многофункционального индикатора (МФИ) данным о дальности до МБУ (ТС), о скорости полета, о направлении этой скорости, о курсовом угле МБУ и пр. Наличие изображения МБУ в центре РЛИ свидетельствует, что режим сопровождения ТС осуществляется и что используемые для этого оценки вектора скорости вертолета верны. В качестве примера на фиг. 4 изображено РЛИ при моделировании режима реального луча на дальности 800 м до МБУ.
На фиг. 5 приведено РЛИ МБУ при моделировании работы РЛП в режиме реального луча на дальности 300 м после выхода вертолета в сектор разрешенного захода на посадку. За счет маневра вертолета ВП с маркерами на ней (нижняя часть чертежа) развернута в сторону вертолета.
При неточном знании скорости вертолета ТС (изображение объекта) будет выходить из центра РЛИ, т.е. АС будет в этом случае неточным. Для корректировки АС ТС (ВП МБУ) осуществляют корректировку оценки вектора скорости вертолета и уточнение положения ТС. Для этого, например, с помощью кнопок на МФИ меняют оценку вектора скорости до прекращения смещения изображения сопровождаемого объекта относительно центра РЛИ и затем уточняют положение ТС, совмещая ее с центром ВП. Таким образом, можно обеспечить достаточно высокую точность сопровождения.
Такой режим полета на автопилоте с визуальной коррекцией по РЛИ положения вертолета относительно ВП и оценки его вектора скорости достаточно прост, но требует участия в пилотировании члена экипажа. Возможен переход на автоматическое сопровождение выбранного радиоконтрастного объекта или участка РЛИ, например, за счет использования корреляционного метода.
По мере приближения к объекту изображение на РЛИ увеличивается и становится более детальным, позволяя пилоту уточнить с помощью выбора ТС место посадки и сформировать более точную траекторию захода на посадку в определенном секторе безопасной посадки, составляющем, как правило, 90…120 градусов.
В непосредственной близости ЛА от ВП осуществляется отключение автопилота и переход на ручное визуальное (в условиях плохой видимости осуществляемое по РЛИ) или на автоматическое управление вертолетом по РЛИ. Для этого на РЛИ, формируемом при лоцировании ВП в надир или на близких к нему углах, отображается точка проекции (ТП) «центра» вертолета (или какой-либо другой его точки) на горизонтальную плоскость (на землю) - красная точка на фиг. 6. Кроме того, на РЛИ может быть отражена линия проекции (ЛП) строительной оси ЛА. РЛП с помощью РЛИ обеспечивает визуализацию ВП, ее маркеров (в том числе, косвенно или непосредственно обозначающих ТПВП и ЛПВП) относительно ТП и ЛП ЛА. При ручном управлении пилот, управляя вектором скорости ЛА, совмещает ТП с ТПВП и ЛП с ЛПВП, что обеспечивает наведение вертолета на центр ВП при требуемом направлении его строительной оси. При автоматической посадке такое совмещение достигается, например, за счет корреляционного метода при использовании имеющегося опорного РЛИ.
При взлете ЛА использование РЛИ РЛП аналогично режиму посадки.
Для информации пилота возможно проводить оценку и выдачу цифровых данных о положении вертолета и точки посадки с использованием имеющихся на борту датчиков скорости вертолета и его высоты.
При изменении наклона антенны за счет крена и тангажа вертолета смещение формируемого РЛИ может компенсироваться, например, цифровым способом на основе данных со специальных измерителей этих параметров, установленных на борту вертолета.
Для иллюстрации характера РЛИ и возможности ручного визуального пилотирования по этим РЛИ на фиг. 6 приведено РЛИ, полученное при моделировании случая, когда используется многолепестковая антенна из 16×16 лучей и 256 приемных модулей. Механическое сканирование отсутствует. При высоте вертолета над уровнем ВП примерно 30 м и его смещении относительно центра ВП примерно на 6 м на РЛИ видны края ВП и расположение на ней 6-ти маркеров с разрешением примерно 1.5 м (по азимуту) на 1.3 м (по углу места). Красная точка соответствует проекции центра вертолета и может быть определена с высокой точностью. Можно отметить, что при переходе к механическому сканированию РЛИ получаются сглаженными и более соответствующими обычному изображению, но зато это РЛИ меняется скачками.
Маркеры для БРЛП могут быть выполнены в виде УО и устанавливаются заподлицо на ВП. При использовании 6-ти маркеров, приводимых на фиг. 6, ТП и ЛП ВП определяются, исходя их расположения этих маркеров. Возможно усложнение РЛИ ВП, например, за счет нанесения на ВП рисунка с использованием диффузно отражающих покрытий, позволяющих при снижении вертолета и уменьшении лоцируемого и отображаемого на РЛИ участка однозначно определять расположение ТП ВП и направление ЛП ВП.
Для увеличения безопасности одновременно, по возможности, используют световые маркеры (огни), наблюдаемые на малых дальностях даже в условиях плохой видимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| КОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2284550C2 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2267797C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2323450C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| Активная радиолокационная система захода и посадки | 2019 |
|
RU2705855C1 |

Изобретение относится к способам навигации, посадки и взлета летательного аппарата (ЛА) с посадкой вертолетного типа. Достигаемый технический результат - обеспечение безопасной навигации вертолета. Указанный результат достигается за счет того, что используют бортовой радиолокатор посадки (РЛП) мм-диапазона, по данным которого формируют радиолокационное изображение, отображаемое в кабине ЛА, осуществляют поиск, обнаружение и идентификацию места посадки ЛА, определяют местоположение места посадки и его вертолетной площадки относительно ЛА и осуществляют навигацию ЛА, используя соответствующие режимы управления. 5 з.п. ф-лы, 6 ил.
1. Способ навигации, посадки и взлета вертолета (далее - ЛА), при котором используют бортовой радиолокатор посадки (РЛП) мм-диапазона, по данным которого формируют радиолокационное изображение (РЛИ), отображаемое на мониторе, и осуществляют поиск, обнаружение и идентификацию места посадки (МП) ЛА, определяют местоположение МП и его вертолетной площадки (ВП) относительно ЛА и осуществляют навигацию ЛА, характеризующийся тем, что при работе РЛП в режиме поиска за счет сканирования реальным лучом антенны при вхождении объекта - «кандидата» на МП в зону поиска его обнаруживают и переводят РЛП в режим «Останов», при котором осуществляют автоматическое сопровождение (АС) точки сопровождения (ТС) - точки на поверхности земли, соответствующей на момент перехода в режим «Останов» априорно выбранной точке на РЛИ, так что при движении ЛА лоцируется и формируется РЛИ одного и того же участка поверхности, а объект РЛИ, совпадающий с ТС, не перемещается по монитору, далее на РЛИ совмещают курсор с изображением «кандидата» и, меняя ТС, устанавливают АС этого «кандидата», затем РЛП переводят в режим локации с синтезированием антенной решетки (режим САР), по результатам которого формируют детальное РЛИ МП с высоким разрешением, по детальному РЛИ проводят идентификации лоцируемого «кандидата» и, если обнаруженный «кандидат» не идентифицируется как искомое МП, то осуществляют возврат в режим поиска, а в случае идентификации «кандидата» определяют по этому РЛИ местоположение его ВП и ориентацию ВП и МП относительно ЛА, проводят оценку возможности и определяют траекторию безопасного захода на посадку на ВП, и далее осуществляют полет по выбранной траектории в автоматизированном или ручном режиме, контролируя взаимное положение МП и ЛА по РЛИ, непрерывно формируемому по данным РЛП в режиме реального луча и при АС ТС, совмещенной сначала с МП, а затем с его ВП; при этом в автоматизированном режиме полет осуществляют по автопилоту в ТС, а при подлете к ВП формируют на РЛИ точку проекции (ТП) и линию проекции (ЛП) на горизонтальную плоскость соответственно выбранной точки ЛА и его строительной оси и, управляя вектором скорости ЛА, совершают зависание ЛА над ВП и его посадку, добиваясь в режиме ручного визуального или автоматического управления вертолетом совмещения на РЛИ ТП и ЛП с точкой посадки ВП (ТПВП) и линией посадки ВП (ЛПВП), характеризующих место посадки ЛА на ВП и направление его строительной оси.
2. Способ по п. 1, характеризующийся тем, что АС выбранной ТС осуществляют путем расчета изменяющихся во времени наклонной дальности, азимута и угла места ТС относительно фазового центра антенны РЛП, исходя из имеющихся на борту текущих оценок взаимного положения ЛА и ТС, вектора скорости и высоты полета ЛА, и по результатам расчета изменяют направление и дальность лоцирования РЛП и соответственно учитывают это при формировании РЛИ и траектории полета ЛА на автопилоте.
3. Способ по п. 1, характеризующийся тем, что для осуществления режима САР сначала ЛА переводят в режим равномерного прямолинейного полета с курсовым углом «кандидата» не менее 15 град., в РЛП отключают механическое сканирование антенной и используют режим АС ТС, совпадающей с «кандидатом» на МП, выбирают параметры лоцирования и формирования детального РЛИ, затем лоцируют МП на интервале синтезирования и по результатам лоцирования формируют детальное РЛИ.
4. Способ по п. 2, характеризующийся тем, что если при АС ТС на экране монитора наблюдается движение РЛИ в ТС, то проводят корректировку оценки вектора скорости, добиваясь, чтобы РЛИ в ТС оставалось неподвижным, и, при необходимости, дополнительно корректируя его положение на РЛИ, наводя курсор на нужную точку и уточняя тем самым ТС.
5. Способ по п. 1, характеризующийся тем, что для получения на РЛИ ВП изображений ТПВП и ЛПВП на ней устанавливают отражающие маркеры, имеющие характерный вид, позволяющий пилоту по РЛИ ВП определять положение ЛА относительно этих ТПВП и ЛПВП.
6. Способ по п. 1, характеризующийся тем, что для обеспечения в РЛП лоцирования в требуемом направлении при появлении у ЛА крена и тангажа текущие значения отклонения вертолета от горизонтального положения, полученные, например, с помощью датчиков крена и тангажа, учитывают при формировании лучей антенны РЛП.
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ПРЕПЯТСТВИЯМИ | 2007 |
|
RU2370786C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВЕРТОЛЕТА В КРИТИЧЕСКИХ РЕЖИМАХ ПИЛОТИРОВАНИЯ | 2010 |
|
RU2445234C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА И ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384862C2 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ВЕРТОЛЕТА | 2006 |
|
RU2322683C2 |
| Фрезерованная зубная шина | 2016 |
|
RU2632755C1 |
| US 6118401 A, 12.09.2000 | |||
| FR 2969307 A1, 22.06.2012. | |||

