Область техники, к которой относится изобретение
Изобретение относится к способам поиска и обнаружения объекта на местности по монохромному цифровому (с градациями яркости в каждом пикселе) изображению этой местности, например по радиолокационному изображению (РЛИ), формируемому в радиолокаторах с синтезированной антенной (РСА) за счет многократного излучения на интервале синтезирования зондирующего сигнала и формирования при движении летательного аппарата (ЛА) виртуальной синтезированной антенной решетки (САР). При этом в общем случае стоит задача поиска, обнаружения и распознавания на РЛИ различных объектов.
Уровень техники
Так как в настоящее время уже получены РЛИ с высоким разрешением, например с разрешением 10 см, то возникает задача обнаружения и распознавания протяженного объекта, занимающего единицы, а иногда десятки и сотни пикселей на РЛИ со своим значением яркости в каждом пикселе.
Поиск одиночных «точечных» (занимающих один элемент разрешения) объектов в свободном пространстве и на местности обычно осуществляется путем просмотра всех элементов разрешения зоны поиска, например по углам и по дальности. В каждом элементе разрешения осуществляют обнаружение объекта путем сравнения сигнала (яркости РЛИ) в этом элементе с порогом обнаружения, выбираемого, например, исходя из допустимого уровня ложных тревог. Для случая обнаружения в свободном пространстве разработаны оптимальные методы, например метод по критерию Неймана - Пирсона с использованием отношения правдоподобия.
Для случая поиска и обнаружения протяженных объектов на фоне местности критерии качества и оптимальные способы обнаружения и распознавания не разработаны. Часто используют двухэтапную технологию обнаружения (см., например, статью Достовалова М.Ю. и др. «Исследование методов автоматического обнаружения объектов на РЛ-изображениях», журнал «Исследование Земли из космоса» за 2005 г, №6, с. 14-27). В соответствии с этой технологией на первом этапе производится обнаружение объектов-кандидатов при допустимо высоком уровне ложных тревог, который гарантировал бы, с одной стороны, низкую вероятность пропуска объектов поиска, а с другой - дальнейший анализ всех обнаруженных кандидатов с использованием имеющихся вычислительных средств. На втором проводится фильтрация (отсев) ложных целей по некоторому набору признаков и проводится распознавание обнаруженных объектов. При этом, как правило, при обнаружении, по аналогии с обнаружением точечных объектов, используют способы, основанные на превышении яркости РЛИ в одном или в нескольких пикселях некоторого порога. Для протяженных объектов рассматривается превышение порога одновременно в нескольких элементах (пикселях), например по критерию «k из m». Для распознавания в настоящее время, как правило, используется оператор. Появляются автоматизированные или автоматические системы, но пока они создаются для частных ситуаций, имеют малую эффективность и, вместе с тем, объем вычислений очень велик, и требуется существенное их сокращение, в том числе за счет сокращения числа ложных тревог. Очевидно, что минимизация ложных тревог требуется и при работе оператора.
Таким образом, очень важно на первом этапе поиска и обнаружения кандидатов на искомый объект обеспечить их надежное обнаружение при минимально возможном числе ложных кандидатов, да еще при допустимом объеме вычислительных затрат (времени на вычисления, в том числе, для работы в реальном или близком к реальному масштабе времени). В настоящее время, как правило, существующие способы поиска и обнаружения при обработке больших массивов РЛИ с высоким разрешением реализуются уже после завершения полетов.
В качестве аналога предлагаемого способа можно рассматривать также способ, изложенный в автореферате диссертации Рогачева В.А. «Математические модели и алгоритмы обработки данных в инфракрасных системах обнаружения при априорной неопределенности», представленной на соискание ученой степени кандидата технических наук, Санкт-Петербург, 2009. Для решения задачи обнаружения полезных сигналов на изображении местности, полученном в инфракрасном диапазоне, осуществляется сканирование изображения окном небольших размеров, состоящим из двух областей: сигнальной и фоновой. Такой способ относится к классу двухвыборочных задач, когда вычисление статистик проводят одновременно по сигналам в двух областях. При этом в соответствии с авторефератом, в зависимости от режима работы фотоприемника, обнаружение полезного сигнала определяется изменением математического ожидания и/или дисперсии на выходе фотоприемника в зависимости от полезного сигнала, фона и собственных помех фотоприемника. Полученный алгоритм не универсален, применим только в определенных случаях и требует формирования двух окон и достаточно большого объема вычислений.
Аналогом предлагаемого способа является также способ обнаружения, изложенный в статье Волкова В.Ю., Макаренко А.А., Рогачева В.А., Турнецкого Л.С. «Обнаружение и выделение объектов на оптикоэлектронных изображениях» (см. сборник «55 лет на службе отечеству» ОАО НПО «Радар - ммс», Санкт-Петербург: 2005 стр. 222-226). Обнаружение осуществляют в окне обработки - в квадрате размером n=N×N. В нем выделяют сигнальное окно - квадрат размером m=М×М, и помеховое окно. Порог обнаружения по яркости для пикселей сигнального окна определяют с помощью помехового окна исходя из яркости РЛИ в этом окне. Объект считается обнаруженным и расположенным, например, в центре сигнального окна при условии одновременного превышения порога в k элементах сигнального окна. Так как далее предполагается распознавание обнаруженного объекта, то говорят об обнаружении на этом этапе кандидата на обнаруживаемый объект. Поиск объекта во всем задаваемом участке изображения (в зоне поиска) осуществляют путем проведения процедуры обнаружения кандидата скользящим окном, т.е. последовательно при каждом сдвиге окна на один элемент изображения по строке и по столбцу во всей зоне поиска (см Справочник по радиолокации. Книга 1. Под редакцией М.И. Сколника. «Техносфера». Москва, 2014).
Поскольку в процессе поиска возникают случаи обнаружения одного и того же объекта при соседних положениях скользящего окна, необходимым этапом после обнаружения скользящим окном становится процедура выделения связных элементов или группировки результатов обнаружения, относящихся к одному и тому же объекту.
За прототип принят способ поиска и обнаружения объекта на местности по РЛИ этой местности, при котором всю зону поиска разбивают на неперекрывающиеся участки, например квадраты поиска размером Nп×Nп пикселей (см. патент «Способ поиск и обнаружения» №2596610 с приоритетом от 16.0602015, опубл. 0.09.2016. Бюл. №25. Авторы Брызгалов А.П. и др.). В каждом из квадратов поиска вычисляют выборочные коэффициенты эксцесса γ распределения яркости изображения и сравнивают их с пороговыми значениями. В случае превышения пороговых значений принимают решение об обнаружении в этом квадрате поиска кандидата на искомый объект. Далее во всех квадратах поиска, в которых принято решение об обнаружении кандидата, проводят его допоиск, уточнение его положения и распознавание.
При этом в интересах уменьшения ложных тревог и увеличения вероятности распознавания размер элемента разрешения РЛИ δразр по обеим координатам РЛИ должен быть существенно меньше протяженности искомых объектов. Размер квадрата поиска Nп выбирают, как правило, соизмеримым или меньше протяженности искомых объектов, но при условии получения выборки, достаточной для вычисления выборочных коэффициентов γ в этих квадратах при наличии и отсутствии на нем искомых объектов.
По каждому обнаруженному кандидату допоиск объекта проводят в пределах соответствующего квадрата поиска при его расширении на величину ошибок совмещения РЛИ разных каналов и на размер квадрата обнаружения.
Пороги для выборочных коэффициентов γ распределения яркости РЛИ определяют исходя из априорной статистики этих коэффициентов для фрагментов РЛИ фона и РЛИ обнаруживаемых объектов с фоном. Причем эти фрагменты должны соответствовать размеру квадратов поиска.
При допоиске можно использовать «яркостной» способ, при котором формируют окно обнаружения, состоящее из двух окон: сигнального и помехового. Обнаружение осуществляется по критерию «k из m», рассматривая превышение в сигнальном окне яркости пикселей РЛИ некоторого порога, рассчитываемому исходя из РЛИ помехового окна. Вместе с тем, эффективным способом допоиска кандидата является также способ, когда допоиск объекта в каждом из квадратов поиска, в котором произошло обнаружение кандидата, проводят путем оценки выборочных коэффициентов γ в скользящем окне в виде квадрата обнаружения размером Nобн×Nобн пикселей и по превышению полученных оценок над фоновыми значениями (порогами) обнаруживают объекты.
По результатам допоиска подтверждают наличие и определяют положение и, по возможности, форму и ориентацию объектов, осуществляя либо сброс обнаруженного ранее кандидата, либо группирование результатов допоиска в соседних окнах в один объект с учетом априорных данных о протяженности объектов.
К недостаткам прототипа, как и других существующих способов обнаружения протяженных объектов, можно отнести тот факт, что они не гарантируют получение наилучшего, насколько это возможно для рассматриваемых условий, технического результата при обнаружении кандидата (например, минимальной вероятности пропуска объекта D0 при фиксированной вероятности ложной тревоги F). То есть, не ясно, насколько сам способ оптимален, при том что вычислительные затраты при этих способах достаточно велики. Поэтому остро стоит задача нахождения способа поиска и обнаружения, который при меньших вычислительных затратах обеспечивает лучшие характеристики обнаружения, например соотношение D0 и F.
Раскрытие изобретения
Сущность предлагаемого изобретения состоит в том, что в способе поиска и обнаружения объекта на местности по монохромному цифровому с градациями яркости в каждом пикселе изображению этой местности, при котором всю зону поиска разбивают на квадраты поиска размером Nп×Nп пикселей, в каждом квадрате поиска вычисляют выборочные среднее значение и среднеквадратическое отклонение распределения яркости изображения, затем вычисляют их выборочное отношение q, которое сравнивают с пороговым значением qпор, и, если это отношение меньше порога, то принимают решение об обнаружении в этом квадрате поиска кандидата на искомый объект и во всех квадратах поиска, в которых принято решение об обнаружении кандидата, проводят его допоиск и уточнение его положения.
В качестве изображения местности обычно используют РЛИ этой местности, формируемое в радиолокаторах с синтезированной антенной решеткой (САР), при разрешении РЛИ δразр по обеим координатам РЛИ меньше протяженности искомых объектов.
На практике РЛИ, полученные при реальных полетах, используют для оценки выборочных средних значений и среднеквадратических отклонений распределения яркости изображения и их отношений. Пороги qпор определяют исходя из имеющейся априорной статистики отношения выборочного среднего значения к выборочному среднеквадратическому отклонению распределения яркости изображения, полученной для фрагментов РЛИ фона и РЛИ обнаруживаемых объектов с фоном. При этом размер фрагментов должен соответствовать размеру квадрата поиска.
Для уменьшения области допоиска размер квадрата поиска Nп выбирают соизмеримым или меньше протяженности искомых объектов, но при условии получения выборки, достаточной для вычисления выборочных моментов распределения яркости и отношения q в окне поиска при наличии и отсутствии в нем объекта.
Допоиск объекта проводят в пределах квадрата поиска при его расширении в каждую сторону на размер квадрата допоиска.
В целях сокращения вычислительных затрат допоиск объекта в каждом из квадратов поиска, в котором произошло обнаружение кандидата, возможно проводить путем оценки выборочных отношений q распределения яркости РЛИ в скользящем окне в виде квадрата обнаружения размером Nобн×Nобн пикселей. По уменьшению оценок q ниже пороговых значений qпор, обнаруживают объекты, а также определяют их положение.
При этом размер квадрата обнаружения Nобн выбирают меньше размера квадрата поиска при условии, что общее число независимых выборок значений яркости РЛИ в квадрате обнаружения достаточно для вычисления выборочных отношений q распределения яркости в этом квадрате.
Технический результат при применении предлагаемого способа заключается в увеличении эффективности обнаружения кандидата по сравнению с прототипом при существенном уменьшении объема вычислений. При этом эффективность обнаружения может характеризоваться, например, уменьшением ложных тревог при сохранении низкой вероятности пропуска искомого объекта, а также уменьшением объема вычислительных затрат.
Перечень таблиц
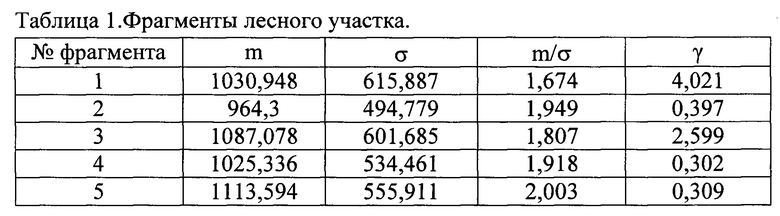
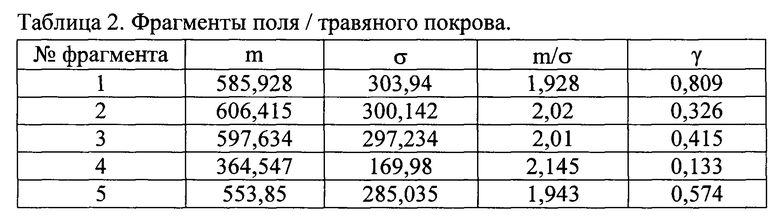
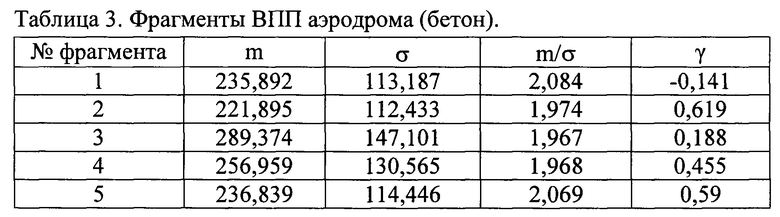
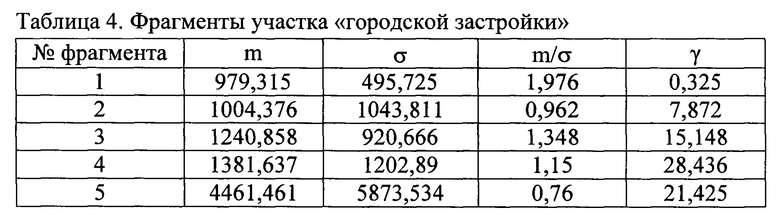
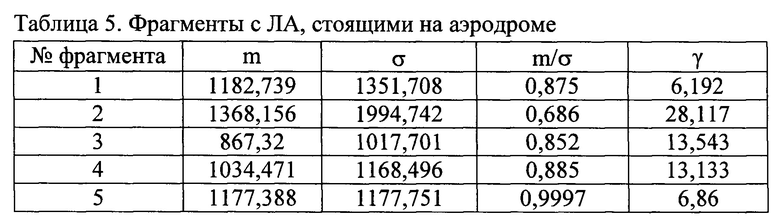
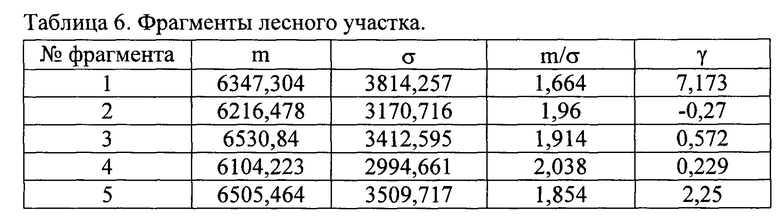
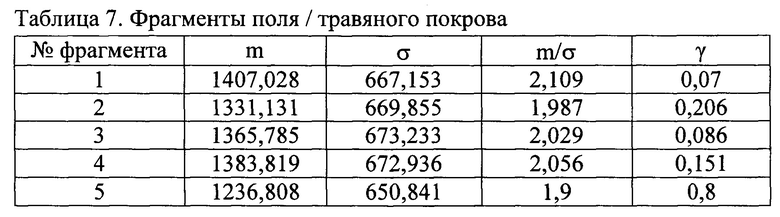
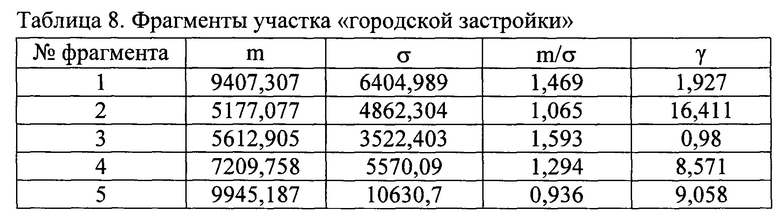
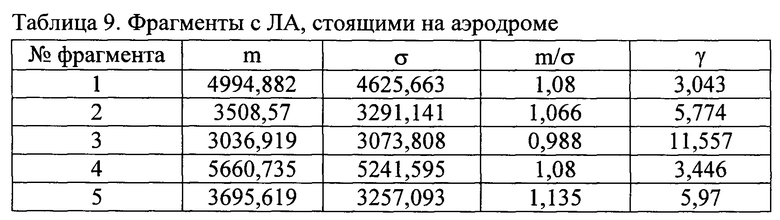
В таблицах приведены выборочные значения среднего m, СКО σ, отношения q=m/σ и коэффициента эксцесса γ для РЛИ разных участков местности и двух диапазонов частот: X (3 см) и Р (70 см).
Таблица 1 - Фрагменты лесного участка. Диапазон X.
Таблица 2 - Фрагменты поля / травяного покрова. Диапазон X.
Таблица 3 - Фрагменты ВПП аэродрома (бетон). Диапазон X.
Таблица 4 - Фрагменты участка «городской застройки». Диапазон X.
Таблица 5 - Фрагменты с ЛА, стоящими на аэродроме. Диапазон X.
Таблица 6 - Фрагменты лесного участка. Диапазон Р.
Таблица 7 - Фрагменты поля / травяного покрова. Диапазон Р.
Таблица 8 - Фрагменты участка «городской застройки». Диапазон Р.
Таблица 9 - Фрагменты с ЛА, стоящими на аэродроме. Диапазон Р.
Осуществление изобретения
Как уже отмечалось выше, на сегодняшний день способы оптимального поиска и оперативного обнаружения на изображении задаваемых объектов и их распознавания не разработаны. Не отработаны даже критерии оптимизации. Особенно это относится к радиолокационным изображениям местности и объектов на ней. В настоящее время все эти операции, как правило, выполняет оператор, но возможности его очень ограничены. Постепенно появляются автоматизированные системы, в том числе использующие алгоритмы предварительного отбора участков местности для их дальнейшего анализа оператором. Но практически сегодня задача решается только для частных ситуаций.
Традиционно при обнаружении воздушных объектов в свободном пространстве и объектов на фоне отражений от местности используют превышение сигналом (яркостью РЛИ) некоторого порога, отсекающего шумы, помехи и фоновый сигнал отражений от местности. Вместе с тем, наличие на лоцируемой местности объекта с отражающими свойствами, резко отличающимися от свойств отражений от местности, достаточно существенно нарушает статистику отражений от этой местности, что может служить информацией для обнаружения факта наличия объекта.
По прототипу (см. патент «Способ поиск и обнаружения» №2596610, указанный ранее) мерой изменения выборочной статистики отражений при наличии или в отсутствии объекта в квадрате поиска служат выборочные коэффициенты распределения яркости РЛИ. При поиске и обнаружении используют рассчитанные для каждого квадрата поиска выборочные коэффициенты асимметрии и/или эксцесса у (см., например, книгу Левина Б.Р. «Теоретические основы статистической радиотехники» книга 1-я, изд. 2-е, М., «Сов. Радио», 1974, стр. 59-60).
Причем следует отметить, что оценка указанных выборочных коэффициентов, проведенная на некотором участке РЛИ, не зависит от расположения объекта на этом участке, а расширение этого участка РЛИ (в значимых для практики пределах) в отсутствие других объектов меняет оценку незначительно. Это дает возможность провести предварительный поиск объектов, разбив всю заданную для поиска зону на квадраты поиска и проведя в каждом квадрате поиска обнаружение объекта - кандидата на искомый объект, рассчитав, исходя из полученного при локации РЛИ, выборочный коэффициент эксцесса и сравнив его с заранее выбранным порогом. В квадратах, в которых порог превышен и, следовательно, обнаружен кандидат, проводится его допоиск. Допоиск в общем случае проводится скользящим окном, размер которого не превышает размер квадрата поиска. По результатам допоиска возможно не только подтвердить наличие кандидата на искомый объект для его дальнейшего распознавания, но и уточнить положение объекта и по возможности при РЛИ с высоким разрешением определить его размеры, форму и ориентацию в пространстве.
Однако принятый за прототип способ не является оптимальным, например, с точки зрения соотношения ложных тревог и вероятности пропуска искомого объекта. Кроме того, этот способ требует вычисление выборочных коэффициентов высокого порядка (выборочных коэффициентов эксцесса и/или асимметрии). При этом, вычислительные затраты достаточно велики, что может вызвать трудности при реализации данного способа в реальном времени.
Вместе с тем, анализ РЛИ, полученных при реальных работах, а также теоретический анализ РЛИ при релеевском распределении яркости фона (отражений от местности) при наличии и в отсутствии объекта показывает, что при поиске и обнаружении объекта можно воспользоваться коэффициентами малого порядка. При этом в предлагаемом способе в каждом квадрате поиска определяют выборочное среднее значение (математическое ожидание) яркости РЛИ m и его выборочное СКО σ (см. ранее указанную книгу Левина Б.Р. «Теоретические основы статистической радиотехники» книга 1-я, стр. 55….57). Далее находят отношение q=m/σ и сравнивают это отношение с пороговым значением. Если отношение меньше порога, то считают, что в этом квадрате произошло начальное обнаружение кандидата на искомый объект.
Выборочное среднее значение яркости РЛИ для каждого квадрата поиска определяется по формуле 1 как
где Хij - значение яркости РЛИ в пикселях в пределах квадрата поиска.
Для этого же квадрата поиска выборочное значение СКО  , где m1выб=m, а выборочный начальный момент второго порядка
, где m1выб=m, а выборочный начальный момент второго порядка
Пороговое значение qпор, учитывая, что во многих случаях распределение отражений от местности примерно одинаково (близко к релеевскому распределению), определяют априорно по имеющимся на практике ранее полученным результатам реального лоцирования местности и уточняют по результатам текущей работы исходя, например, из числа ложных обнаружений на некоторых контрольных участках анализируемых РЛИ.
В целях оптимизации временных затрат на допоиск и сокращения площади допоиска как требующего большие вычислительные затраты размер квадрата поиска Nп выбирают соизмеримым или меньше протяженности искомых объектов, но при условии получения выборки, достаточной для вычисления выборочных коэффициента q в окне поиска при наличии и отсутствии в нем объекта.
Допоиск объекта проводят в пределах квадрата поиска при его расширении на величину ошибок совмещения РЛИ, если при прииске и допоиске используют РЛИ разных каналов, и на размер квадрата допоиска. При этом при допоиске можно использовать «яркостные» способы, когда используют превышение яркости РЛИ некоторого порога как, например, описанный выше способ по критерию «n из m». Этот метод дает достаточно объективную картину о расположении обнаруженного объекта и о его азимутальной ориентации. Однако в целях сокращения вычислительных затрат допоиск объекта в каждом из квадратов поиска, в котором произошло обнаружение кандидата, возможно проводить путем оценки выборочных коэффициентов q распределения яркости РЛИ в скользящем окне в виде квадрата обнаружения размером Nобн×Nобн пикселей. По уменьшению оценок q ниже пороговых значений qпор обнаруживают объекты, а также определяют их положение, например, определением центра объекта после группирования результатов обнаружения.
Для более точного определения местоположения обнаруженного объекта и сокращения вычислительных затрат размер квадрата обнаружения Nобн выбирают меньше размера квадрата поиска при условии, что общее число независимых выборок значений яркости РЛИ в квадрате обнаружения достаточно для вычисления выборочных коэффициентов q в этом квадрате.
Возможность использования при поиске и обнаружении отношения q можно проиллюстрировать данными о значениях выборочных статистик m, σ и q при рассмотрении РЛИ разных поверхностей, проведенными в таблицах 1…9. Данные взяты из РЛИ, полученных при реальных работах радиолокатора бокового обзора в двух диапазонах: Х-диапазоне (3 см) и Р-диапазоне (70 см). Размер фрагмента (квадрата поиска) составлял 25×25 пикселей при шаге вычисления РЛИ, примерно равном разрешению 0,667 м × 0,6 м (в дальностном и азимутальном направлениях) и 2,06 м × 1,8 м соответственно в Х-диапазоне и Р-диапазоне. Для сопоставления с прототипом в таблицах приведены также данные по выборочным значениям коэффициентов эксцесса γ. Данные по РЛИ ВПП аэродрома (бетону) не приведены, так как оно визуально неотличимо от РЛИ поля / травяного покрова.
Непосредственно из таблиц, если исключить фрагменты «городских застроек», следует, что для фрагментов с ЛА qЛА всегда меньше q для РЛИ естественной местности. Поэтому, если выбрать, например, пороговое значение qпор=1.2, то все ЛА будут обнаружены, а все фрагменты без ЛА будут исключены из дальнейшего анализа. Следует отметить, что выборочные значения q для фрагментов с естественной местностью дают значения близкие к этому значению при релеевском распределении плотности вероятности qрел ≈ 1.913.
Вместе с тем, значения γ для фрагментов с ЛА, даже если исключить фрагменты городских застроек, не всегда уверенно превышают γ фрагментов с естественной местностью, т.е., используя γ, нельзя обнаружить все ЛА без ложных тревог.
Из таблиц следует также, что размер квадрата поиска 25×25 пикселей достаточен с точки зрения нахождения выборочных коэффициентов. Иначе разброс оценок этих коэффициентов был бы слишком велик, что привело бы к ошибкам обнаружения. При этом полагается, что выборки РЛИ статистически независимы, в частности, шаг вычисления РЛИ примерно соответствует его разрешению (не меньше). В противном случае необходимо увеличение окна.
Реализацию предлагаемого способа, оценку его технической эффективности и сравнение ее с технической эффективностью способа-прототипа можно пояснить и провести на примере РЛИ, полученных при реальных работах РЛС бокового обзора с САР. Используются РЛИ Х-диапазона размером 3,86 км на 4,6 км с шагом дискретизации РЛИ, примерно соответствующим разрешающей способности по двум координатам и примерно равным 0.6 м, и РЛИ Р-диапазона той же местности размером 4 км на 5,25 км с шагом примерно 2 м. Это РЛИ включает аэродром с крупными и набольшими самолетами, большие участки естественного ландшафта (поля, перелески, дороги и пр.) и участки с малоэтажной застройкой и прочим техногенным «мусором» («городской застройки»).
Рассмотрим вариант использования для поиска отношения m/σ с замощением РЛИ Х-диапазона квадратом поиска 25×25 пикселей и условием обнаружения: (m/σ)пор=1. Результат: всего квадратов поиска («замощения» всей зоны поиска) Nкв=71224, число квадратов, в которых превышен порог обнаружения («информационные квадраты») - No6=2189, включая квадраты со всеми большими и мелкими ЛА, При этом число тестовых ЛА составляло примерно 40, остальное - ложные тревоги. Следует отметить, что подавляющее число ложных тревог получено за счет техногенного «мусора». При этом время обработки и обрисовки РЛИ на дисплее персонального компьютера с выделением информационных квадратов - 9 с.
Тот же вариант, но с порогом обнаружения (m/σ)пор=0,9, дает результат: Nкв=71224, No6=1602, есть пропуски и больших и мелких ЛА (время обработки - 8 с). Этот вариант показывает, что (m/σ)пор=1 является оптимальным с точки зрения минимума ложных тревог при отсутствии пропуска при обнаружении ЛА.
Этот же вариант, но с использованием выборочного коэффициента эксцесса γ при пороговом значении γпор=10, дает результат: число квадратов замощения Nкв=71224, количество обнаруженных кандидатов Nоб=4088, включая все большие и практически все мелкие ЛА (время обработки - 16 с). Выбранный порог дает минимум ложных тревог при практически отсутствии пропусков ЛА. Тем не менее, он проигрывает и по ложным тревогам, и по времени счета.
Для Р-диапазона можно рассмотреть вариант использования отношения m/σ с замощением РЛИ квадратом 30×30 пикселей и условием обнаружения: (m/σ)пор=1,2. Результат: Nкв=6468, No6=929, включая обнаружение всех больших и мелких ЛА (время обработки - 2…3 с).
Тот же вариант с использованием выборочного коэффициента эксцесса γ с пороговым значением γпор=6 дает результат: число квадратов замощения Nкв=6468, количество обнаруженных кандидатов No6=1468, включая все большие и мелкие ЛА (время обработки - 4 с). Приведенные примеры еще раз показывают преимущество способа с использованием выборочного отношения q.
Вместе с тем, следует отметить, что автоматическое обнаружение искомых объектов на фоне техногенного «мусора» практически невозможно, и следует по возможности исключать из зоны поиска такие участки, что резко, на порядки, сократит число «подозрительных» участков (ложных тревог) по результатам поиска и соответственно время допоиска.
При допоиске с использованием скользящего окна обнаружение одного и того же объекта происходит при нескольких положениях скользящего окна. Поэтому необходимо группирование результатов обнаружения с целью выделения одного или нескольких или сброса обнаруженного объекта. При этом используются максимальное расстояние между положениями окна, при котором принимается решение о принадлежности индикаторов обнаружения к одному объекту, а также максимальный и минимальный размер обнаруживаемого объекта. Очевидно, что значения параметров группирования индикаторов зависят от протяженности объекта, характера отражений от него, разрешения в используемом для поиска и обнаружения РЛИ и пр.
Возможности обнаружения кандидата по результатам поиска и допоиска можно проиллюстрировать на приведенным ранее примере поиска на РЛИ X-диапазона с помощью отношения q=m/σ с параметрами: размер квадрата поиска 25×25 пикселей и qпор=1. Проведем далее допоиск объектов двумя разными методами. В первом случае допоиск осуществляется яркостным методом со следующими исходными данными: размер помехового окна N=25, размер сигнального окна М=8, порог обнаружения в сигнальном окне k=8 (критерий «8 из 64»), вероятность ложной тревоги в одном пикселе F1=10-4, параметры связывания Dоб (максимальное расстояние между положениями окон, при котором принимается решение о принадлежности обнаруженных кандидатов одному объекту) и Dmax (максимальный размер обнаруживаемого объекта) равны 30 и 120 пикселям, соответственно. Итог: обнаружено 535 объектов, включая практически все большие и малые ЛА, за 2 мин 35 с (с учетом времени поиска общие временные затраты - 2 мин 44 с).
Отметим, что при отсутствии этапа поиска, т.е. при анализе всего РЛИ яркостным методом с приведенными выше параметрами, получено 918 обнаруженных объектов за 25 мин 54 с.
Второй вариант допоиска - тот же алгоритм, что и при поиске, т.е. использующий отношение m/σ, с квадратом анализа 25×25 пикселей, но более низким порогом (m/σ)пор=0,73, и аналогичными первому варианту параметрами связывания: Do6=30 и Dmax=120. Результат: 362 обнаруженных объекта, включая практически все большие и малые ЛА, за 5 мин 20 с (суммарно с учетом времени поиска 5 мин 29 с).
При беспоисковом анализе всего РЛИ скользящим окном методом отношения m/σ получим 353 обнаруженных объекта за 29 минт 46 с.
Таким образом, выигрыш во времени обработки без снижения ее эффективности достигается при использовании на этапе поиска алгоритма, основанного на вычислении выборочных отношений q. При допоиске ожидаемая техническая эффективность предлагаемого способа и способа-прототипа примерно одинакова, и при выборе способа допоиска необходимо учитывать дополнительные характеристики, такие как точность определения местоположения обнаруженного объекта и пр.
Из таблиц видно, что размер окна 25×25 пикселей обеспечивает получение достаточных статистических данных для оценки отношения q и уверенного обнаружения объектов на фоне стационарных отражающих поверхностей. Поэтому выборку в 625 пикселей (при окне 25×25 пикселей) уже можно считать достаточной для расчета выборочных отношений q. При этом полагается, что выборки статистически независимы. В противном случае необходимо увеличение окна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ОБЪЕКТА | 2015 |
|
RU2596610C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2323450C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ЛИНЕЙНОЙ ЧАСТИ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2013 |
|
RU2553843C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ СЕГМЕНТАЦИИ ПОЛУТОНОВЫХ СЛОЖНОСТРУКТУРИРОВАННЫХ РАСТРОВЫХ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2580074C1 |
| Способ автоматического распознавания сцен и объектов на изображении | 2021 |
|
RU2778906C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОПОРНЫХ ТОЧЕК НА КОСМИЧЕСКИХ ИЗОБРАЖЕНИЯХ МЕСТНОСТИ ПРИ ОТСУТСТВИИ ПАРАМЕТРОВ ГЕОГРАФИЧЕСКОЙ ПРИВЯЗКИ | 2021 |
|
RU2768219C1 |
Изобретение относится к способам поиска и обнаружения объекта на местности по монохромному цифровому (с градациями яркости в каждом пикселе) изображению этой местности, например по радиолокационному изображению, формируемому в радиолокаторах с синтезированной антенной за счет многократного излучения на интервале синтезирования зондирующего сигнала и формирования при движении летательного аппарата виртуальной синтезированной антенной решетки. Достигаемый технический результат - увеличение эффективности обнаружения объекта при существенном уменьшении объема вычислений. Указанный технический результат достигается за счет того, что всю зону поиска разбивают на неперекрывающиеся квадраты поиска размером Nп×Nп пикселей, в каждом квадрате поиска вычисляют выборочные среднее значение и среднеквадратическое отклонение распределения яркости изображения, затем вычисляют их отношение q и сравнивают его с порогом qпор и, если отношение меньше порога, то принимают решение об обнаружении в этом квадрате поиска кандидата на искомый объект, и во всех квадратах поиска, в которых принято решение об обнаружении кандидата, проводят его допоиск и уточнение его положения. 6 з.п. ф-лы, 9 табл.
1. Способ поиска и обнаружения объекта на местности по монохромному цифровому с градациями яркости в каждом пикселе изображению этой местности, при котором всю зону поиска разбивают на неперекрывающиеся участки, например на квадраты поиска размером Nп×Nп пикселей, характеризующийся тем, что в каждом квадрате поиска вычисляют выборочные среднее значение и среднеквадратическое отклонение распределения яркости изображения, затем вычисляют их отношение q и сравнивают его с порогом qпор и, если отношение меньше порога, то принимают решение об обнаружении в этом квадрате поиска кандидата на искомый объект и во всех квадратах поиска, в которых принято решение об обнаружении кандидата, проводят его допоиск и уточнение его положения.
2. Способ по п. 1, характеризующийся тем, что в качестве изображения местности используют радиолокационное изображение (РЛИ) этой местности, формируемое в радиолокаторах с синтезированной антенной решеткой (САР), причем разрешение РЛИ δразр по обеим координатам РЛИ меньше протяженности искомых объектов.
3. Способ по п. 2, характеризующийся тем, что пороги qпор определяют исходя из априорной статистики отношения q выборочного среднего значения к выборочному среднеквадратическому отклонению распределения яркости изображения, полученной для фрагментов РЛИ фона и РЛИ обнаруживаемых объектов с фоном, при размерах фрагментов, соответствующих размеру квадрата поиска.
4. Способ по п. 1, характеризующийся тем, что размер квадрата поиска Nп выбирают соизмеримым или меньше протяженности искомых объектов, но при условии получения выборки, достаточной для вычисления выборочных моментов распределения яркости и отношения q в окне поиска при наличии и отсутствии в нем объекта.
5. Способ по п. 2, характеризующийся тем, что допоиск объекта проводят в пределах квадрата поиска при его расширении в каждую сторону на размер квадрата допоиска.
6. Способ по п. 1, характеризующийся тем, что допоиск объекта в каждом из квадратов поиска, в котором произошло обнаружение кандидата, проводят путем оценки отношений q распределения яркости РЛИ в скользящем окне в виде квадрата обнаружения размером Nобн×Nобн пикселей и по уменьшению оценок q ниже пороговых значений qпор, обнаруживают объекты, а также определяют их положение.
7. Способ по п. 6, характеризующийся тем, что размер квадрата обнаружения Nобн выбирают меньше размера квадрата поиска при условии, что общее число независимых выборок значений яркости РЛИ в квадрате обнаружения достаточно для вычисления выборочных отношений q распределения яркости в этом квадрате.
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ОБЪЕКТА | 2015 |
|
RU2596610C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ЦВЕТА ОБЪЕКТА | 1998 |
|
RU2142144C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ОБЪЕКТАМИ НА ПОВЕРХНОСТИ БОРТОВОЙ РАДИОТЕПЛОЛОКАЦИОННОЙ СТАНЦИЕЙ, СОВМЕЩЕННОЙ С РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2008 |
|
RU2379707C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОЙ ОБСТАНОВКИ С ПОМОЩЬЮ АНТЕННОЙ РЕШЕТКИ | 2013 |
|
RU2539558C1 |
| JP 2009014684 A, 22.01.2009 | |||
| WO 2006088845 A3, 01.02.2007 | |||
| US 20080018738 A1, 24.01.2008. | |||

