Изобретение относится к области транспортного машиностроения в частности к тормозным системам транспортных средств, и может быть использовано в автоматических противоблокировочных устройствах. , Известен способ регулирования тормозного момента на колесе транспортного средства, заключакждайся в периодическом повьгоении и понижении тормозного момента и поддержании постоянной величины его между фазами понижения и повышения, причем командный сигнал на понижение, прекращение понижения и повышение тормозного момента формируют в зависимости от величины измеряемого в процессе торможения углового ускорения и замедления колеса 1.
Недостаток этого способа заклю чается в поздней подаче командного сигнала на прекращение снижения тор моэного момента (при достижении угловьм замедлением значения, равного нулю). Это приводит к сниженто среднего за цикл значения реализуемого по условиям сцепления тормозного момента, н как следствие к снижению эффективности торможения, а также к повышенному расходу рабочего тела.
Целью изобретения является повышенна эффективности торможения и снижение расхода рабочего тела.
Цель достигается тем, что командный сигнал на прекращение снижения тормозного момента подают при достижении угловым замедлением колеса величины, равной отношению продольного замедления транспортного средст10ва к радиусу колеса.
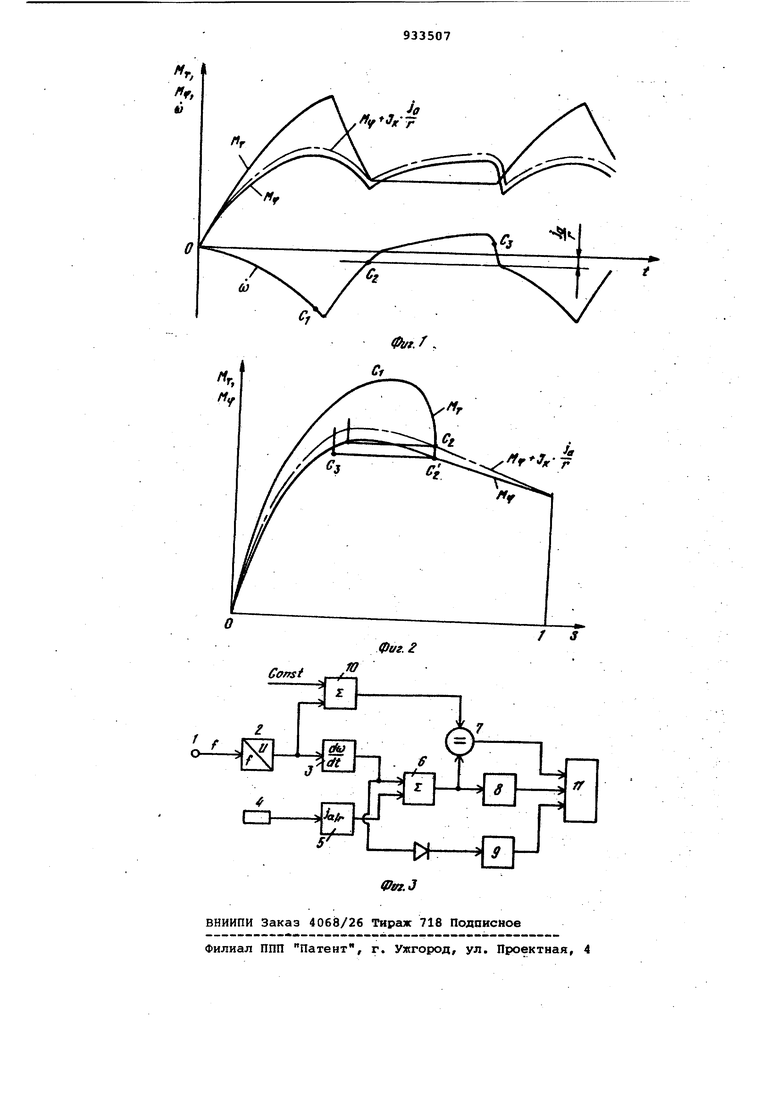
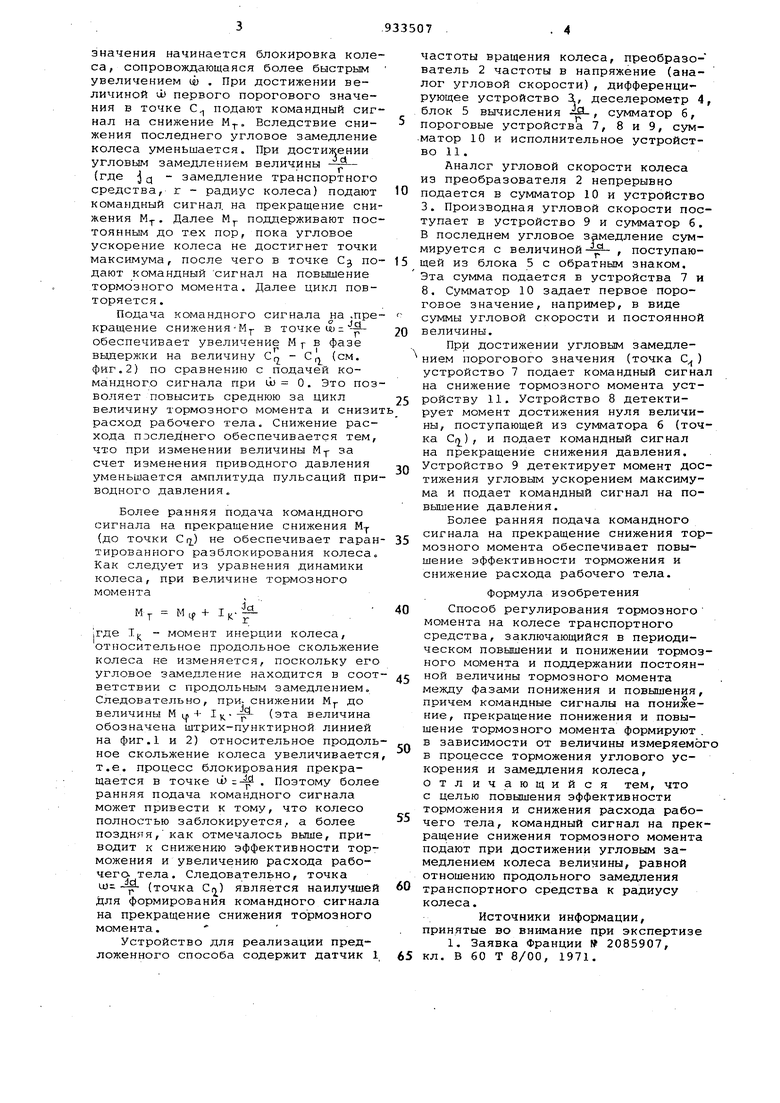
На фнг.1 показаны графики изме-т нения за цикл работы протнвоблокировочной системы подведенного к колесу М н реализуемого по условиям 15 сцепления М ц тормозных моментов и углового ускорения (замедления) колеса; на фиг.2 - зависимость указанных тормозных моментов от величины относительного продольного сколь20жения колеса; на фиг.3 - функциональная схема устройства для реализации предложенного способа.
Регулирование тормозного мсмлента осуществляется следующнм образом.
25
При повышении М. (фиг.1) растут угловое замедление лЬ и относительное продольное скольжение S колеса. При этом увеличивается и .После .|. ; достижения величиной М if максималь. ного приданных сцепных условиях значения начинается блокировка коле са, сопровождающаяся более быстрьом увеличением ш . При достижении величиной d первого порогового значения в точке С подают командный сиг нал на снижение Вследствие снижения последнего угловое замедление колеса уменьшается. При достижении угловым замедлением величины {где jq - замедление транспортного средства, г - радиус колеса) подают командный сигнал, на прекращение сни жения М. Далее М поддерживают пос тоянным до тех пор, пока угловое ускорение колеса не достигнет точки максимума, после чего в точке Сд по дают командный сигнал на повышение тормозного момента. Далее цикл повторяется . Подача командного сигнала на .пре кращение снижения-Mj- в точке ш - обеспечивает увеличение М в фазе выдержки на величину С, -i (с:м. фиг.2) по сравнению с подачей командного сигнала при и) О. Это поз воляет повысить среднюю за цикл величину тормозного момента и снизи расход рабочего тела. Снижение расхода последнего обеспечивается тем, что при изменении величины Mf- за счет изменения приводного давления уменьшается амплитуда пульсаций при водного давления. Более ранняя подача командного сигнала на прекращение снижения М(до точки С г) не обеспечивает гаран тированного разблокирования колеса Как следует из уравнения динамики колеса, при величине тормозного момента MT Мц, + 1. |где 1|/ - момент инерции колеса, относительное продольное скольжение колеса не изменяется, поскольку его угловое замедление находится в соот ветствии с продольным замедлением. Следовательно, при- снижении М до величины М ц| + I к 1 (эта величина обозначена штрих-пунктирной линией на фиг.1 и 2) относительное продол ное скольжение колеса увеличиваетс т.е. процесс блокирования прекращается в точке ш -- . Поэтому более ранняя подача командного сигнала может привести к тому, что колесо полностью заблокируется, а более поздняя,как отмечалось выще, приводит к снижению эффективности тор можения и увеличению расхода рабочего- тела. Следовательно, точка ш- - (точка Сп) является наилучше для формирования командного сигнал на прекращение снижения тормозного момента. Устройство для реализации предложенного способа содержит датчик частоты вращения колеса, преобразователь 2 частоты в напряжение (анаог угловой скорости), дифференциующее устройство 3., деселерометр 4, блок 5 вычисления ДЗ-/ сумматор 6, пороговые устройства 7, 8 и 9, суматор 10 и исполнительное устройство 11 . Аналог угловой скорости колеса из преобразователя 2 непрерывно подается в сумматор 10 и устройство 3. Производная угловой скорости поступает в устройство 9 и сумматор б. В последнем угловое замедление суммируется с величиной- , поступающей из блока 5 с обратным знаком. Эта сумма подается в устройства 7 и 8. Сумматор 10 задает первое пороговое значение, например, в виде суммы угловой скорости и постоянной величины. При достижении угловым замедлением порогового значения (точка С) устройство 7 подает командный сигнал на снижение тормозного момента устройству 11. Устройство 8 детектирует момент достижения нуля величины, поступающей из сумматора б (точка Сг) , и подает командный сигнал на прекращение снижения давления. Устройство 9 детектирует момент достижения угловым ускорением максимума и подает командный сигнал на повышение давления. Более ранняя подача командного сигнала на прекращение снижения тормозного момента обеспечивает повышение эффективности торможения и снижение расхода рабочего тела. Формула изобретения Способ регулирования тормозного момента на колесе транспортного средства, заключающийся в периодическом повышении и понижении тормозного момента и поддержании постоянной величины тормозного момента между фазами понижения и повышения, причем командные сигналы на понижение, прекращение понижения и повышение тормозного момента формируют . в зависимости от величины измеряемого в процессе торможения углового ускорения и замедления колеса, отл ичающийся тем, что с целью повьлцения эффективности торможения и снижения расхода рабочего тела, командный сигнал на прекращение снижения тормозного момента подают при достижении угловым замедлением колеса величины, равной отношению продольного замедления транспортного средства к радиусу колеса. Источники информации, принятые во внимание при экспертизе 1. Заявка Франции 2085907, кл. В 60 Т 8/00, 1971.
,
ff, о
fir
dJ
/y.
fff-J -7
/ 5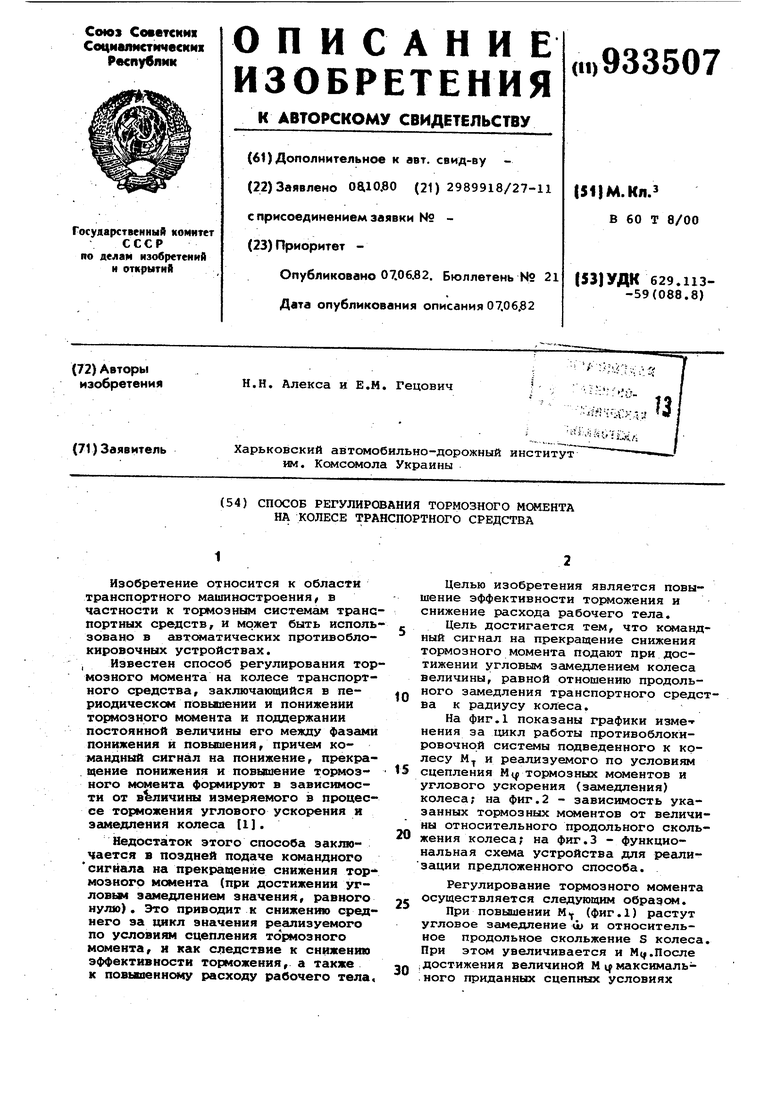
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования качения колеса в тормозном режиме | 1980 |
|
SU878627A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| Способ управления процессом торможения колеса автомобиля | 1977 |
|
SU779120A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Способ предотвращения блокированияКОлЕСА АВТОМОбиля | 1979 |
|
SU839789A1 |
| Способ управления торможением колеса | 1984 |
|
SU1172782A1 |
| Способ регулирования давления в тормозном приводе антиблокировочной системы | 1986 |
|
SU1423442A1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |