Область техники
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте и предназначено для увеличения достоверности контроля целостности подвижного состава.
Уровень техники
Магистральные участки дорог оснащаются системами интервального регулирования, обеспечивающими безопасность движения поездов по перегону автоматически. В то же время имеются малодеятельные участки дорог, на которых ввиду малой интенсивности движения применение систем интервального регулирования, основанных на использовании большого количества напольной аппаратуры, нецелесообразно.
Эти участки обычно оборудуют полуавтоматической блокировкой [1], отличительными особенностями которой является то, что данная система не может непрерывно контролировать местоположение состава, целостность рельсовых нитей и целостность самого состава во время его движения по перегону. Перечисленные обстоятельства являются серьезным препятствием для повышения пропускной способности участков дорог, оборудованных полуавтоматической блокировкой.
1) Известны устройства проверки целостности подвижного состава, основанные на счете числа осей проходящих поездов. Сведения о реализации способа счета числа осей представлены на с. 140 [4]. Устройства, реализующие способ счета осей подвижного состава, могут снабжаться первичным датчиком различного типа. На с. 18 [4] описана конструкция педали рельсовой саморегулирующейся просадочной. На с. 20 [4] представлена трансформаторно-компенсационная педаль типа ТКП (используется на сортировочных станциях). На с. 21 [4] представлены магнитоэлектронный датчик типа МЭД и бесконтактная магнитная педаль типа ПБМ-56.
Недостатками устройств контроля целостности подвижного состава, реализующих способ счета числа осей подвижного состава, являются следующие:
1) необходимость размещения напольной аппаратуры, протягивания линий связи и электропитания;
2) низкая помехозащищенность системы контроля от ложных срабатываний в результате воздействия на напольные контрольные датчики волочащихся за подвижным составом предметов, колебаний подвижного состава и т.д.;
3) формирование сигнала целостности состава возможно только в отдельных жестко заданных точках пути;
4) резкое увеличение количества напольной аппаратуры с увеличением числа проверок целостности подвижного состава;
5) информация от данного устройства бортовой аппаратурой не используется;
6) низкая информативность применяемых устройств;
7) напольная аппаратура может стать объектом вандализма.
2) Известно устройство контроля целостности подвижного состава, состоящее из пассивного датчика, закрепляемого на хвосте сформированного поезда, и напольного активного датчика, монтируемого в контрольной точке пути. Сведения по устройству приведены на с. 140 [4]. В устройстве применяют активный датчик типа индуктор (основные сведения о принципе работы индуктора приведены на с. 20 [4] в разделе “индуктивные датчики”).
Основными недостатками устройства контроля целостности подвижного состава, состоящего из пассивного датчика, закрепляемого на хвосте сформированного поезда, и напольного активного датчика, монтируемого в контрольной точке пути, являются следующие:
1) индуктор, изготавливаемый из металла, имеет значительную массу, что затрудняет обслуживание поездов;
2) низкая помехозащищенность системы контроля от ложных срабатываний в результате воздействия на напольные контрольные датчики волочащихся за подвижным составом предметов;
3) отсутствие контроля полносоставности при движении поезда на участках маршрута, расположенных между точками контроля целостности подвижного состава, из-за отсутствия информации от индуктора в тех местах, где отсутствует напольная приемная аппаратура;
4) информация от данного датчика бортовой аппаратурой не используется, а используется только диспетчерским пунктом;
5) низкая информативность применяемых устройств.
В настоящее время поезда, особенно грузовые, слабо оснащены автономными устройствами проверки целостности состава.
В пассажирских поездах контроль целостности осуществляется по линейным проводам электропневматического тормоза и по тормозной магистрали. В грузовых - только по наличию давления в тормозной магистрали (пропадание давления означает обрыв) [2].
3) Известно устройство контроля целостности подвижного состава, содержащее локомотивный пневмоэлектрический датчик, узел отображения состояния подвижного состава и исполнительный узел. Пневмоэлектрический датчик представляет собой корпус, разделенный на две полости при помощи мембранной перегородки, снабженный узлом контроля положения мембраны в виде микровыключателя и катушкой. Одна полость датчика сообщается с каналом дополнительной разрядки магистральной части воздухораспределителя, другая - с каналом тормозного цилиндра. Узел отображения состояния подвижного состава представляет собой сигнальную лампу, а исполнительный узел - контакты реле [3].
Недостатками данного устройства контроля целостности подвижного состава являются:
1) низкая информационная емкость;
2) отсутствие дополнительных диагностических функций;
3) контроль целостности состава только с одного конца тормозной магистрали не обеспечивает безопасности движения, так как возможны ситуации, когда обрыв тормозной магистрали при отцепе хвостового вагона не приводит к автоторможению состава.
Последнее характерно для длинных поездов, наиболее склонных к обрывам хвостовой части [3]. С учетом изношенности парка вагонов возможны также ситуации, когда за одну поездку происходят два неблагоприятных события: закупорка или засорение тормозной магистрали и последующий обрыв вагона или группы вагонов, расположенных дальше места первой неисправности, по направлению от головы к хвосту поезда.
Из известных устройств-аналогов наиболее близким по своей сущности является устройство контроля целостности подвижного состава, содержащее локомотивный пневмоэлектрический датчик, узел отображения состояния подвижного состава и исполнительный узел [3].
Сущность изобретения
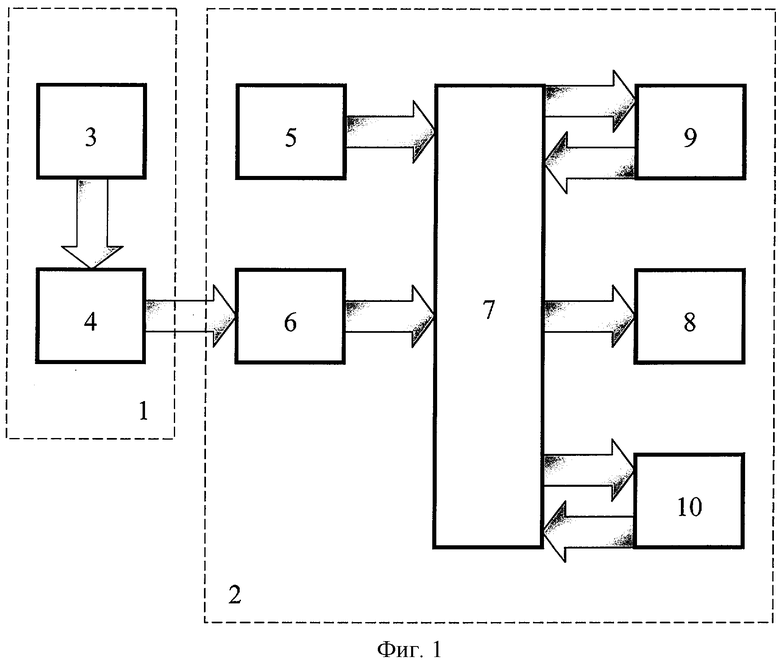
Структурная схема заявленного устройства представлена на фиг.1.
Устройство состоит из следующих двух частей: части, размещаемой в хвосте поезда 1, и части, размещаемой на локомотиве 2. Часть, размещаемая в хвосте поезда, состоит из хвостового пневмоэлектрического датчика 3 и передатчика 4. Часть, размещаемая на локомотиве, состоит из локомотивного пневмоэлектрического датчика 5, приемника сигналов хвостового датчика 6, узла обработки информации датчиков 7, узла отображения состояния подвижного состава 8, узла организации внешней связи 9 и исполнительного узла 10. Выход узла 5 связан с одним из входов узла 7. Выход узла 3 посредством узла 4 связан со входом узла 6, выход которого связан с другим входом узла 7. Один из выходов узла 7 связан со входом узла 8, другой выход связан со входом узла 9, а третий - со входом узла 10.
Работает устройство следующим образом. При приведении тормозной системы сформированного поезда в рабочее состояние в тормозную магистраль со стороны локомотива начинает нагнетаться сжатый воздух. В этот момент локомотивный пневмоэлектрический датчик 5 начинает регистрировать давление на входе в тормозную магистраль, передавая информацию на вход узла обработки информации датчиков 7. Хвостовой пневмоэлектрический датчик 3 начнет передавать информацию о давлении через некоторое время, в течение которого волна сжатого воздуха, скорость которой не превышает скорости звука, преодолеет расстояние от точки присоединения локомотивного пневмоэлектрического датчика до точки подключения хвостового. Давление, регистрируемое хвостовым пневмоэлектрическим датчиком 3, будет отличаться от давления, регистрируемого локомотивным пневмоэлектрическим датчиком 5. Разница давлений и скоростей изменения давления на контрольных концах тормозной магистрали при этом определяется длиной поезда, утечками воздуха сквозь неплотности тормозной магистрали, местными сопротивлениями и для конкретного сформированного поезда имеет случайный характер. Сигнал о величине давления в хвостовой части тормозной магистрали поступает в передатчик 4, откуда передается на вход приемника сигналов хвостового датчика 6. С выхода узла 6 сигнал поступает на второй вход узла обработки информации датчиков 7. Узел 7 запоминает техническое состояние тормозной магистрали (данные, сформированные хвостовым и локомотивным пневмоэлектрическими датчиками) и в процессе движения поезда по маршруту непрерывно сравнивает с ним текущие характеристики тормозной магистрали. Результаты диагностики отображаются в узле отображения состояния подвижного состава 8, при этом на вход узла организации внешней связи 9 подается сигнал подтверждения работоспособности пневматической части тормозного оборудования подвижной единицы и целостности состава, а исполнительный узел 10 находится в отключенном состоянии.
В случае выхода характеристик тормозной магистрали за заданные пределы в случаях:
1) несоответствия давлений и разницы давлений заданным - в случае обрыва хвостового вагона или резкого увеличения утечек при нарушении технического состояния пневматической части тормозного оборудования;
2) несоответствия разницы скоростей изменения давления в контрольных точках тормозной магистрали - при резком увеличении местного сопротивления в результате резкого уменьшения сечения тормозной магистрали в промежутке между контрольными точками от засорения;
3) одновременного несоответствия параметров, перечисленных в п.п.1, 2 в результате обрыва хвостовой части и подпитки оборванной части от местных резервуаров или без таковой, на узел 8 подается сигнал тревоги, при этом узел 9 не формирует очередной сигнал целостности и (или) работоспособности, а узел 10 активизируется, включая автоторможение поезда.
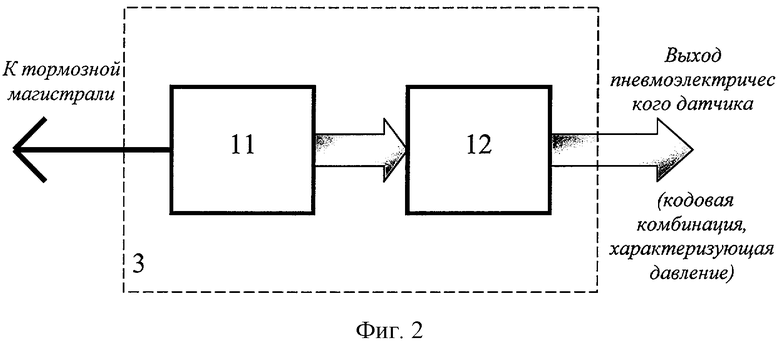
Вышерассмотренный пневмоэлектрический датчик, представленный на фиг.2, содержит первичный пневмоэлектрический датчик-преобразователь 11, выход которого соединен с входом узла предварительной обработки сигнала давления 12, представляющим собой цифровую схему. Поэтому выходной сигнал пневмоэлектрического датчика представляет собой цифровой код.
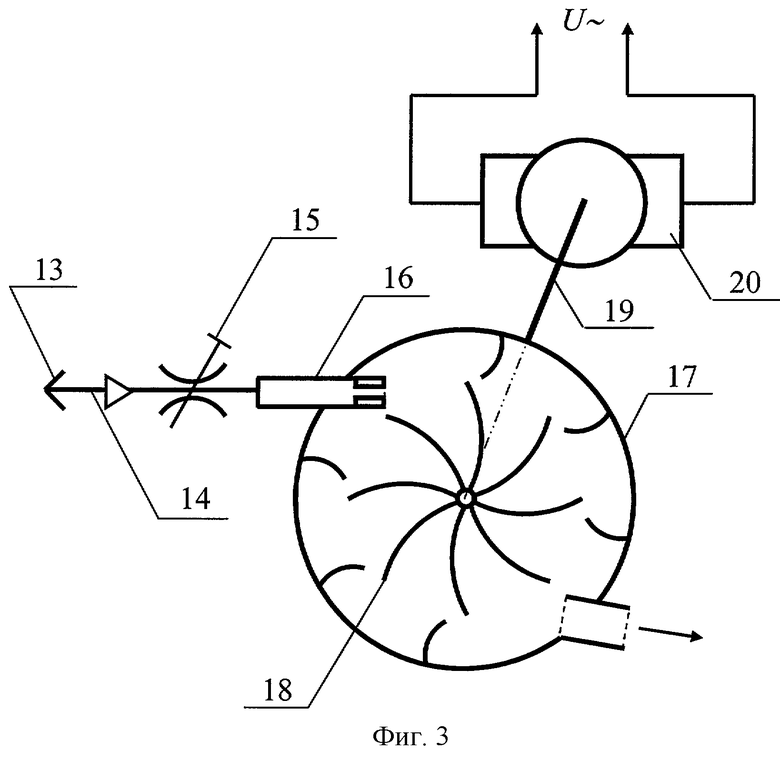
Структурная схема первичного пневмоэлектрического датчика-преобразователя приведена на фиг.3.
Устройство представляет собой преобразователь давления воздуха в тормозной магистрали в электрический сигнал и содержит следующие узлы. Штуцер 13 для присоединения устройства к тормозной магистрали. К штуцеру 13 присоединена трубка отбора воздуха из тормозной магистрали 14. В разрез трубки отбора воздуха вставлен регулировочный дроссель 15, служащий для регулировки напора воздуха (его функцию может выполнять сама трубка, так как ее диаметр является естественным ограничителем потока воздуха). Другой конец трубки присоединен к соплу 16, расположенному внутри корпуса 17 турбинки. Ротор турбинки представляет собой крыльчатку 18, неподвижно насаженную на вал 19 и свободно вращающуюся внутри корпуса 17. Вал турбинки жестко соединен с валом генератора 20. Генератор 20 является первичным датчиком-преобразователем. Его выход соединяется с входом узла предварительной обработки сигнала давления.
Работает устройство следующим образом. При приведении тормозной системы в рабочее состояние воздух из тормозной магистрали через присоединительный кран по штуцеру 13 попадает в трубку отбора воздуха 14.
Проходя по трубке, поток воздуха ограничивается регулировочным дросселем 15. Далее воздух попадает в сопло 16, откуда вылетает под давлением. Вылетая из сопла, реактивная струя напором, пропорциональным давлению в тормозной магистрали, оказывает давление на лопатки турбинки 18, заставляя последнюю вращаться с угловой скоростью ω, которая пропорциональна давлению Р в тормозной магистрали. Вал 19, жестко связанный с крыльчаткой, также вращается со скоростью ω. С учетом того, что ротор генератора неподвижно насажен на вал 19 турбинки, образуя с крыльчаткой единую систему, вращение крыльчатки с угловой скоростью ω приводит к вращению ротора генератора с той же скоростью. При вращении ротора генератора 20 в статорной обмотке последнего индуцируется электродвижущая сила (ЭДС), величина которой пропорциональна угловой скорости вращения ротора электрической машины.
Основными достоинствами устройства являются:
1) применен активный датчик-преобразователь (генераторный), который не требует сторонних источников электропитания, сигнал которого может помимо прочего использоваться для питания электронной начинки пневмоэлектрического датчика и передатчика;
2) отсутствие напольных устройств;
3) повышенная информативность первичного пневмоэлектрического датчика-преобразователя (аналоговый сигнал) позволяет осуществлять непосредственно в пути следования поезда не только качественный контроль (динамический контроль) давления в тормозной магистрали, но и общую диагностику тормозного оборудования бортовыми средствами в режиме реального времени;
4) невысокий расход воздуха;
5) небольшие габариты.
Дополнительная компенсация инерции вращающихся масс турбинки и ротора генератора, а значит, и повышение быстродействия устройства осуществляется применением в конструкции корпуса турбинки 17 каналов специальной конфигурации, создающими встречный поток воздуха в зоне вращения лопастей. Достоинством такого способа торможения крыльчатки является отсутствие частей, подверженных износу.
Часть перечисленных выше узлов может быть интегрирована друг в друга. Например, генератор и турбинка могут быть объединены в одном устройстве, в котором ротор генератора будет одновременно являться и крыльчаткой турбинки, а корпус являться статором генератора.
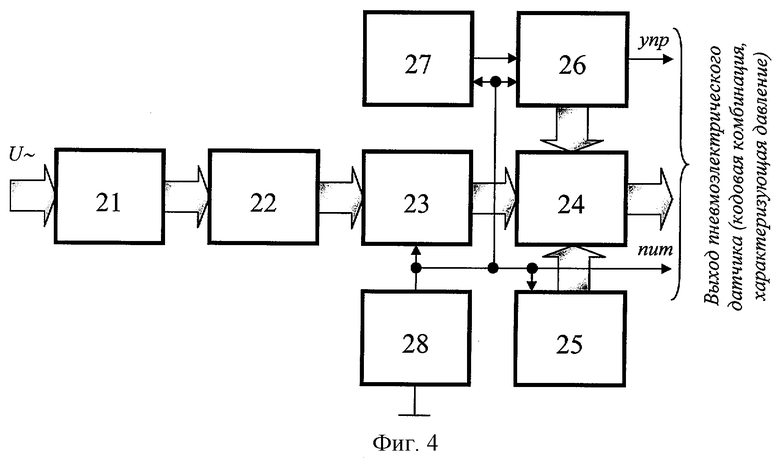
Структурная схема узла предварительной обработки сигнала давления приведена на фиг.4.
Устройство состоит из следующих узлов. Узел выпрямления и фильтрации 21, вход которого является входом устройства. К выходу узла 21 присоединен вход узла регулировки чувствительности 22. Выход узла 22 соединен со входом аналого-цифрового преобразователя (АЦП) 23. Выход АЦП соединен с одними из входов узла преобразования параллельного кода в последовательный 24. К другим входам узла 24 присоединен выход постоянного запоминающего устройства 25. На управляющий вход узла 24 присоединен выход блока управления 26, вход которого синхронизируется от тактового генератора 27. Электронные узлы, за исключением узлов 21 и 22, присоединены по цепям питания к источнику питания 28.
Работает устройство следующим образом. Первоначально переменная ЭДС, снимаемая с выхода первичного пневмоэлектрического датчика-преобразователя, попадает в узел выпрямления и фильтрации 21, где осуществляется преобразование переменного тока в постоянный, а также выделяется постоянная составляющая сигнала. Далее сигнал попадает в узел регулировки чувствительности 22 устройства. Этот узел позволяет осуществить точную установку порогов чувствительности устройства. Измерение сигнала и преобразование его в цифровую форму осуществляется в АЦП 23, входным сигналом для которого является выходной сигнал узла 22. С выхода узла 23 сигнал в оцифрованном виде и параллельном коде поступает в узел преобразования параллельного кода в последовательный 24. В этом узле производится соединение сигнала, пришедшего с выхода АЦП с кодом, поступившим из постоянного запоминающего устройства 25. Код, записанный в постоянном запоминающем устройстве 25, представляет собой код идентификации датчика. Кроме вышеуказанной функции, узел 24 осуществляет преобразование параллельного кода в последовательный (последнее необходимо для передачи по каналу связи). Последовательный код далее поступает на вход передатчика. Алгоритм работы электронной части устройства реализуется блоком 26, а синхронизация работы узлов - при помощи тактового генератора 27. Питание электронной части устройства осуществляется от источника питания 28, который может быть реализован в виде гальванического источника питания, либо в виде стабилизатора напряжения, подключенного к выходу пневмоэлектрического датчика-преобразователя, либо в виде комбинированного источника питания, включающего в себя зарядное устройство и гальванический элемент.
Необходимо отметить, что часть перечисленных выше узлов может быть интегрирована друг в друга, ПЗУ может представлять собой в простейшем случае набор перемычек, блок управления может быть выполнен на основе жесткой логической схемы, а буферное ОЗУ - на основе группы отдельных регистров.
Перечень чертежей
Фиг. 1. Структурная схема устройства контроля целостности подвижного состава.
1. Часть устройства, размещаемая в хвосте поезда.
2. Часть устройства, размещаемая на локомотиве.
3. Хвостовой пневмоэлектрический датчик.
4. Передатчик.
5. Локомотивный пневмоэлектрический датчик.
6. Приемник сигналов хвостового датчика.
7. Узел обработки информации датчиков.
8. Узел отображения состояния подвижного состава.
9. Узел внешней связи.
10. Исполнительный узел.
Фиг. 2. Структурная схема хвостового пневмоэлектрического датчика.
11. Первичный пневмоэлектрический датчик-преобразователь.
12. Узел предварительной обработки сигнала давления.
Фиг. 3. Структурная схема первичного пневмоэлектрического датчика-преобразователя.
13. Штуцер.
14. Трубка отбора воздуха.
15. Дроссель регулировочный.
16. Сопло.
17. Корпус турбинки.
18. Крыльчатка турбинки.
19. Вал.
20. Генератор.
Фиг. 4. Структурная схема узла предварительной обработки сигнала давления.
21. Узел выпрямления и фильтрации.
22. Узел регулировки чувствительности.
23. Аналого-цифровой преобразователь.
24. Узел преобразования параллельного кода в последовательный.
25. Постоянное запоминающее устройство.
26. Блок управления.
27. Тактовый генератор.
28. Источник питания.
Сведения, подтверждающие промышленную применимость
Все используемые в устройстве принципы функционирования и узлы известны из уровня науки и техники и используются в различных отраслях промышленности.
Источники информации
1. Филлипов М.М., Уздин М.М. Железные дороги: Общий курс. - М.: Транспорт, 1991 г., с. 172-173, 181.
2. Смагин Б.В. Автоматические тормоза и безопасность движения поездов. уч. пособ. - М.: РГОТУПС, 1997 г., с. 11.
3. Иноземцев В.Г.Тормоза железнодорожного подвижного состава. - М.: Транспорт, 1979 г., с. 242-243.
4. Устинский А.А., Степенский Б.М., Цыбуля Н.А. Автоматика, телемеханика и связь на железнодорожном транспорте. - М.: Транспорт, 1985 г., с. 17-23, 139-140.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| Устройство контроля целостности тормозной системы железнодорожного транспортного средства | 2024 |
|
RU2828313C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2016 |
|
RU2625207C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2770034C1 |
| Единая цифровая бортовая платформа безопасности (БСБ-Е) | 2021 |
|
RU2768688C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПАКЕТНЫХ ПОЕЗДОВ | 2022 |
|
RU2781700C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2009 |
|
RU2392156C1 |
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте и предназначено для увеличения достоверности контроля целостности подвижного состава. Устройство контроля целостности подвижного состава содержит локомотивный пневмоэлектрический датчик, узел отображения состояния подвижного состава и исполнительный узел. Устройство содержит также хвостовой пневмоэлектрический датчик, соединенный с передатчиком, который связан посредством приемника сигналов хвостового пневмоэлектрического датчика с узлом обработки информации датчиков, к другому входу которого подключен выход локомотивного пневмоэлектрического датчика. Выход узла обработки информации датчиков связан со входом узла отображения состояния подвижного состава, входом узла внешней связи и исполнительным узлом. В результате повышается достоверность контроля целостности подвижного состава. 3 з.п. ф-лы, 4 ил.
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1996 |
|
RU2106994C1 |
| Устройство для счета вагонов | 1985 |
|
SU1337301A1 |
| Устройство для контроля тормозной сети подвижного состава | 1990 |
|
SU1794723A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 1995 |
|
RU2089419C1 |

