Изобретение относится к сельскохозяйственному машиностроению, в частности к транспортным средствам, предназначенным для грузоперевозок. Известно транспортное средство (а.с. СССР №927618, B62D 53/00), содержащее двухосное шасси с колесами, включающее раму, на которой установлен моторно-трансмиссионный блок, кабина с пультом управления, а также платформа, шарнирно соединенная с шасси, и расположенный под ней гидроцилиндр с системой рычагов. Недостатком данного устройства есть то, что в нем отсутствует механизм опускания и подъема платформы с грунта, что связано с сокращением перечня видов грузоперевозок и увеличением трудоемкости погрузочно-разгрузочных работ, выполняемых в процессе эксплуатации.
Наиболее близким к предполагаемому изобретению техническим решением (прототипом) является транспортное средство по а.с. СССР №1142322, В60Р 1/02. Оно представляет собой устройство, которое содержит двухосное шасси с колесами и рамой в виде двух жестко связанных между собой лонжеронов, на которой установлен моторно-трансмиссионный блок, кабина с пультом управления и на шарнирных рычагах платформа, оборудованная гидроцилиндром и механизмом подъема и опускания. Недостатком этого транспортного средства также является отсутствие механизма опускания платформы на грунт, что усложняет эксплуатацию из-за большой трудоемкости погрузочно-разгрузочных работ, а при необходимости обеспечения таких работ, как перевозка, например, сельскохозяйственных животных, делает невозможным выполнение их без дополнительных приспособлений.
В основу предлагаемого изобретения поставлена задача расширения при эксплуатации сферы использования транспортных средств в народном хозяйстве и уменьшение трудоемкости погрузочно-разгрузочных работ при грузоперевозках.
Для достижения указанного технического результата шарнирные рычаги платформы транспортного средства установлены с возможностью поворота вокруг их общей оси, которая шарнирно закреплена в основаниях, приваренных к лонжеронам задней полурамы с возможностью опрокидывания платформы вокруг указанной общей оси. При этом механизм подъема и опускания платформы представляет собой жестко установленные на указанной общей оси кронштейны, шарнирно соединенные со штоками двух гидроцилиндров гидросистемы механизма подъема и опускания платформы, связанных с пультом управления, при этом корпус каждого из гидроцилиндров закреплен на задней полураме, а к краям общей оси жестко прикреплены два бугеля с полуосями задних колес. Указанные отличительные признаки позволяют платформе заявленного транспортного средства не только опускаться и подниматься, но и своим краем ложиться на грунт, т.е. находятся в причинно-следственной связи с достигаемым заявленным техническим результатом.
Заявляемое техническое решение поясняется чертежами:
на фиг.1 изображен общий вид транспортного средства;
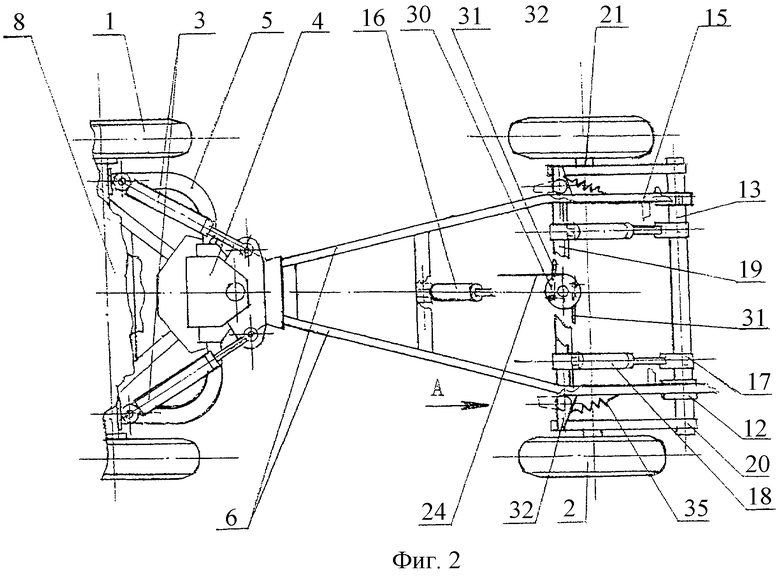
на фиг.2 - вид сверху на транспортное средство, изображенное на фиг.1, (без платформы);
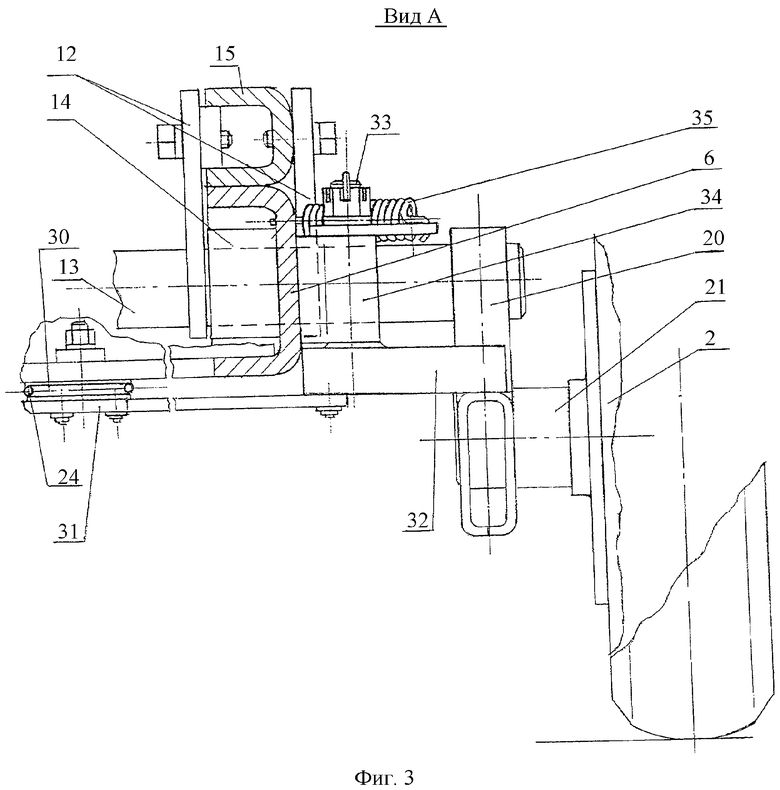
на фиг.3 - вид А на фиг.2;
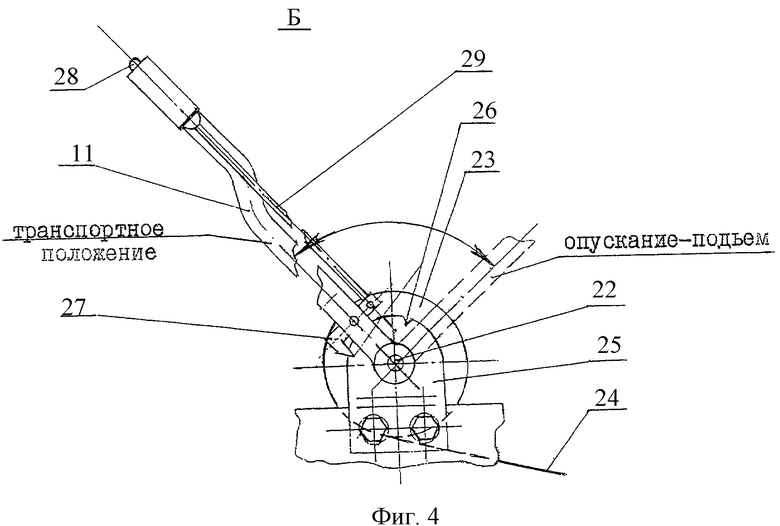
на фиг.4 - вынесенный элемент Б на фиг.1.
Транспортное средство содержит двухосное шасси с передними 1 и задними 2 колесами и рамой, которая состоит из передней и задней полурам, соединенных между собой с помощью двух гидроцилиндров 3 и поворотного шарнира 4, к передней части которого жестко присоединены два передних лонжерона 5 передней полурамы, а к задней - два лонжерона 6 задней полурамы. На передней полу раме установлена кабина 7 с пультом управления и моторно-трансмиссионный блок 8 с двигателем и трансмиссией, корпус которой с помощью двух рукавов соединен с бортовыми передачами и ведущими передними колесами. Пульт управления содержит однопроводную гидросистему, гидрораспределитель с двумя рукоятками 9 для опрокидывания, поднимания и опускания задней части платформы 10, а также рычаг управления 11 для фиксации платформы в транспортном положении.
Платформа 10 размещена на задней полураме с двумя жестко связанными между собой лонжеронами 6. Причем платформа установлена на шарнирных рычагах 12, которые установлены с возможностью поворота вокруг их общей оси 13, шарнирно закрепленной в основаниях 14, что приварены к лонжеронам 6 и с возможностью опрокидывания платформы вокруг указанной общей оси. Под платформой 10 расположен жестко с ней связанный подрамник 15, который ложится на лонжероны 6. С помощью гидроцилиндра 16 платформа с подрамником может опрокидываться вокруг оси 13.
Кроме того, платформа 10 оборудована механизмом подъема и опускания ее на грунт и фиксации в транспортном положении. Механизм выполнен таким образом. На общей оси 13 жестко установлены кронштейны 17, шарнирно соединенные со штоками двух связанных с пультом управления гидроцилиндров 18 гидросистемы механизма подъема и опускания платформы, каждый из которых закреплен своим корпусом на перекладине 19 задней полурамы. К краям общей оси 13 жестко прикреплены два бугеля 20 с полуосями 21, на которые установлены задние колеса 2.
Рычаг управления 11 фиксацией платформы 10 закреплен на оси 22. На оси 22 установлен на шпонке (на чертеже не показано) шкив 23. К шкиву 23 прикреплен один конец троса 24 (фиг.4). Ось 22 рычага управления 11 прикреплена к днищу кабины 7 с возможностью поворота в двух кронштейнах 25 с пазами 26. Фиксатор 27, входящий в зацепление с пазами 26, с помощью кнопки 28 и тяги 29 фиксирует рычаг 11 в положениях «транспортное» и «опускание-подъем» (фиг.4). Другой конец троса 24, что прикреплен к шкиву 23, соединен со шкивом 30, который расположен на задней полураме. Шкив 30 с помощью двух тяг 31 связан с правым и левым фиксирующими устройствами. Каждое из фиксирующих устройств выполнено в виде упора 32, установленного на оси 33 с возможностью поворота в основании 34, прикрепленного к лонжерону 6. Упоры 32 с помощью пружин 35 постоянно установлены перпендикулярно к лонжеронам 6 в позиции «зафиксировано» и препятствуют перемещению лонжеронов в направлении их опускания. Такая позиция упоров отвечает «транспортному» положению платформы 10 и рычага 11. Позиция упоров 32 «расфиксировано» отвечает положению «опускание-подъем» рычага управления 11 (на фиг.2 показано пунктиром) и не препятствует перемещению бугелей 20 относительно лонжеронов 6 при опускании платформы 10 на грунт потому, что упоры прижаты к лонжеронам.
Управление гидросистемой осуществляется гидрораспределительным краном, который содержит две рукоятки 9, имеющие положения «подъем», «нейтральное» и «плавающее». Одна рукоятка 9 управляет гидроцилиндром 16 для опрокидывания, а другая - гидроцилиндрами 18 опускания - подъема платформы 10. Гидрораспределительный кран соединен с помощью трубопроводов с насосом и баком (на чертеже не показано), а также с гидроцилиндрами 16 и 18, образовывая однопроводную гидросистему.
В зависимости от направления перемещения штоков гидроцилиндров 18 задний край рамы транспортного средства при подъеме-опускании и опрокидывании размещенной на ней платформы 10 может занимать три положения, поворачиваясь в вертикальном направлении относительно поперечной оси передних колес:
- верхнее, когда штоки гидроцилиндров полностью выдвинуты и задняя часть платформы расположена под некоторым углом к горизонту, что отвечает положению «подъем» рукоятки 9 и положению «опускание-подьем» рычага управления 11 (на фиг.4 показано пунктиром);
- нижнее, когда штоки гидроцилиндров полностью втянуты и задняя часть платформы 10 опущена на грунт, что отвечает положению «плавающее» рукоятки 9 и положению «опускание-подъем» рычага управления 11 (на фиг.4 показано пунктиром). При этом угол между опущенной на грунт платформой и горизонтальной осью задних колес равен углу поворота вертикальной оси кабины и горизонтальных осей моторно-трансмиссионного блока относительно, соответственно, вертикальной и горизонтальной осей передних колес;
- среднее (горизонтальное), фиксируется упорами 32 и отвечает положению «плавающее» рукоятки 9 и положению «транспортное» рычага управления 11 (на фиг.4 показано основными линиями).
Транспортное средство работает следующим образом. При фиксации платформы 10 в транспортном (горизонтальном) положении рукоятки 9 гидрораспределительного крана находятся в «плавающем» положении, рычаг управления 11 находится в «транспортном» положении (см. фиг.4), а упоры 32 пружинами 35 повернуты в позиции «зафиксировано», т.е. расположены перпендикулярно к лонжеронам, препятствуя перемещению бугелей 20 вокруг осей задних колес 2 и опусканию заднего края рамы с платформой 10.
При необходимости загрузки (или разгрузки) транспортного средства необходимо платформу 10 опустить на грунт. Для этого рукоятку 9, которая управляет гидроцилиндрами 18, переключают на подачу масла к гидроцилиндрам (положение «подъем»). В результате этого штоки гидроцилиндров 18 несколько выдвинутся, повернув бугели 20 вокруг осей задних колес и поднимая на некоторый угол от горизонта платформу 10 с подрамником 15, освобождают упоры 32, которые фиксируют положение платформы. Дальше необходимо, нажав на кнопку 28, перевести рычаг управления 11 в положение «опускание-подъем» (см. фиг.4), влияя, таким образом, с помощью троса 24, шкива 30 и тяг 31 на упоры 32, возвратив их в позиции «расфиксировано» (упоры прижаты к лонжеронам). После этого рукоятку 9 гидрораспределителя, которая управляет гидроцилиндрами 18, переводят в «плавающее» положение, в результате чего задний край платформы, перемещая под собственным весом бугели 20 вокруг осей задних колес и общей оси 13, опускается на грунт. При этом все транспортное средство с рамой поворачивается также в вертикальном направлении вокруг оси передних колес. Такое положение платформы позволяет с наименьшими затратами ручного труда осуществить загрузку (разгрузку) транспортного средства.
После загрузки транспортного средства рукоятку 9, которая управляет гидроцилиндрами 18, устанавливают в положение «подъем», поднимая платформу 10 с грузом в положение немного выше горизонтального, после чего фиксируют ее, переведя рукоятку 9 в «нейтральное» положение. Далее, установив рычаг 11 в «транспортное» положение, рукоятку 9 переводят из «нейтрального» положения в «плавающее». После этого платформа 10 под собственным весом опускается до касания двумя бугелями 20 упоров 32, устанавливаясь в горизонтальном (транспортном) положении. Транспортное средство готово к перевозке груза.
Разгрузка транспортного средства осуществляется в порядке, указанном выше для случая загрузки (разгрузки) транспортного средства с опусканием задней части платформы на грунт.
В случае, если был доставлен, например, сыпучий груз (песок, зерно и т.п.), его разгрузка осуществляется путем опрокидывания платформы 10 без опускания ее на грунт. Для этого рукоятку 9 управления гидроцилиндром 16 переводят из «плавающего» положения в положение «подъем», после чего шток гидроцилиндра 16 выдвигается, опрокидывая платформу 10 с грузом вокруг общей оси 13. При достижении платформой, в процессе ее подъема, некоторого положения под углом к горизонту, груз под собственным весом сползает по днищу платформы. Дальше транспортное средство перемещают вперед на низкой передаче, при этом рукоятку 9 управления гидроцилиндром 16 переводят в «плавающее» положение. Освобожденная от груза платформа 10 под собственным весом, поворачиваясь вокруг оси 13 на рычагах 12, перемещает шток гидроцилиндра 16 внутрь цилиндра и опускается до соприкосновения своим подрамником 15 с лонжеронами 6.
Шарнирные рычаги платформы установлены с возможностью поворота вокруг их общей оси, которая шарнирно закреплена в основаниях, приваренных к лонжеронам задней полурамы с возможностью опрокидывания платформы вокруг указанной общей оси. При этом механизм подъема и опускания платформы представляет собой жестко установленные на указанной общей оси кронштейны, шарнирно соединенные со штоками двух гидроцилиндров гидросистемы механизма подъема и опускания платформы, связанных с пультом управления. Корпус каждого из гидроцилиндров закреплен на задней полураме, а к краям общей оси жестко прикреплены два бугеля с полуосями задних колес, а подъем и опускания платформы на грунт осуществляется с поворотом транспортного средства в вертикальном направлении вокруг поперечной оси передних колес. При этом угол между опущенной платформой и горизонтальной осью задних колес равняется углу поворота вертикальной оси кабины и горизонтальных осей моторно-трансмиссионного блока относительно, соответственно, вертикальной и горизонтальной осей передних колес (т.е. α=α'). При эксплуатации транспортных средств такой конструкции расширяется сфера их использования и уменьшается трудоемкость погрузочно-разгрузочных работ в связи с возможностью погрузки непосредственно с грунта без дополнительного подъемного оборудования.
На Харьковском тракторном заводе выполнены конструкторские проработки возможности создания транспортного средства такой конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| УНИВЕРСАЛЬНЫЙ ТРАКТОР | 1992 |
|
RU2045465C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ | 2009 |
|
RU2426298C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к транспортным средствам, которые предназначены для грузоперевозок. Транспортное средство содержит двухосное шасси с передними и задними колесами и рамой. Рама состоит из передней полурамы, на которой установлен моторно-трансмиссионный блок и кабина с пультом управления, и задней полурамы, на которой установлена на шарнирных рычагах платформа, оборудованная гидроцилиндром и механизмом ее подъема и опускания. Указанные шарнирные рычаги установлены с возможностью поворота вокруг их общей оси, шарнирно закрепленной в основаниях, приваренных к лонжеронам задней полурамы, и с возможностью опрокидывания платформы вокруг указанной общей оси. Механизм подъема и опускания платформы представляет собой жестко установленные на указанной общей оси кронштейны, шарнирно соединенные со штоками двух гидроцилиндров гидросистемы механизма подъема и опускания платформы, связанных с пультом управления. Корпус каждого из гидроцилиндров закреплен на задней полураме. К краям общей оси жестко прикреплены два бугеля с полуосями задних колес. Опускание и подъем платформы осуществляется с поворотом транспортного средства вокруг оси передних колес в вертикальном направлении. Угол между опущенной на грунт платформой и горизонтальной осью задних колес равен углу поворота вертикальной оси кабины и горизонтальных осей моторно-трансмиссионного блока относительно, соответственно, вертикальной и горизонтальной осей передних колес. Благодаря этому при эксплуатации расширяется сфера использования транспортных средств такой конструкции и уменьшается трудоемкость погрузочно-разгрузочных работ в связи возможностью погрузки непосредственно с грунта без дополнительного подъемного оборудования. 4 ил.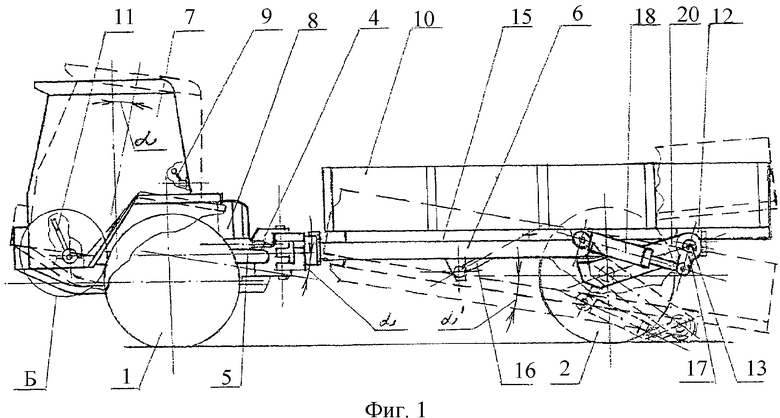
Транспортное средство, содержащее двухосное шасси с передними и задними колесами и рамой, состоящей из передней полурамы, на которой установлен моторно-трансмиссионный блок и кабина с пультом управления, и задней полурамы, на которой установлена на шарнирных рычагах платформа, оборудованная гидроцилиндром и механизмом ее подъема и опускания, отличающееся тем, что указанные шарнирные рычаги установлены с возможностью поворота вокруг их общей оси, шарнирно закрепленной в основаниях, приваренных к лонжеронам задней полурамы, и с возможностью опрокидывания платформы вокруг указанной общей оси, при этом механизм подъема и опускания платформы представляет собой жестко установленные на указанной общей оси кронштейны, шарнирно соединенные со штоками двух гидроцилиндров гидросистемы механизма подъема и опускания платформы, связанных с пультом управления, при этом корпус каждого из гидроцилиндров закреплен на задней полураме, а к краям общей оси жестко прикреплены два бугеля с полуосями задних колес, при этом опускание и подъем платформы осуществляется с поворотом транспортного средства вокруг оси передних колес в вертикальном направлении, а угол между опущенной на грунт платформой и горизонтальной осью задних колес равен углу поворота вертикальной оси кабины и горизонтальных осей моторно-трансмиссионного блока относительно, соответственно, вертикальной и горизонтальной осей передних колес.
| Транспортное средство | 1983 |
|
SU1142322A1 |
| Колесный трактор с переменной базой | 1981 |
|
SU927618A1 |
| DE 4429986 A, 18.05.1995. | |||

