Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известен способ взведения бортовых систем управляемого снаряда [1], заключающийся в том, что под действием ствольной перегрузки запускают часовой механизм, по истечении времени, установленного в часовом механизме, разарретируют гироскоп инерциальный и взводят батарею питания бортовой аппаратуры, от нее последовательно взводят батареи питания головки самонаведения, от одной из которых отстреливают блок носовой, открывая входной зрачок головки самонаведения, раскрывают рули рулевого привода.
Недостатком данного способа является то, что при использовании в системе управления воздушно-динамического рулевого привода, работающего от набегающего потока, при отсутствии команд управления последний находится в режиме удержания нуля (происходят автоколебания относительно нулевого положения в пределах единиц градусов). Такой режим при полете снаряда приводит к увеличению индуктивного сопротивления и к увеличению величины коэффициента лобового сопротивления Сх, что приводит к снижению скорости снаряда, увеличению технического рассеивания и к ухудшению динамики работы воздушно-динамического привода на конечном участке наведения, что снижает точность наведения.
Задачей настоящего предложения является повышение точности наведения управляемых снарядов. Поставленная задача достигается тем, что в способе взведения бортовых систем управляемого снаряда, заключающемся в том, что под действием ствольной перегрузки запускают часовой механизм, по истечении времени, установленного в часовом механизме, разарретируют гироскоп инерциальный и взводят батарею питания бортовой аппаратуры, от нее последовательно взводят батареи питания головки самонаведения, при выходе на режим одной из батарей питания головки самонаведения отстреливают блок носовой, открывая входной зрачок головки самонаведения, раскрывают рули рулевого привода, раскрытие рулей рулевого привода осуществляется по сигналу "Захват", формируемому головкой самонаведения после начала приема сигналов, отраженных от цели.
Исключение в известном способе времени работы воздушно-динамического привода в режиме удержания нуля от момента раскрытия рулей до момента поступления на них команд управления с головки самонаведения позволяет исключить влияние работы привода на техническое рассеивание (скорость снаряда) и тем самым повысить точность наведения.
Предлагаемый способ взведения бортовых систем управляемого снаряда может быть реализован, например, в устройстве, приведенном на чертеже, где 1 - головка самонаведения, 2 - часовой механизм, 3 - блок носовой, 4 - гироскоп инерциальный с ламельным датчиком, 5 - рулевой привод, 6 - блок питания, 7 - схема И, 8 - схема ИЛИ, 9, 10, 11, 12, 13 - первый, второй, третий, четвертый и пятый усилители мощности, 14, 15, 16, 17 - первая, вторая, третья и четвертая обмотки управления рулевого привода, 18, 19, 20 - батареи питания головки самонаведения, 21- батарея питания бортовой аппаратуры, при этом элементы 1-21 выполнены, например, как в прототипе.
Работает устройство следующим образом.
При выстреле от бойка орудия через капсюльную втулку воспламеняется метательный заряд и под действием давления газов снаряд выстреливается из орудия.
Под действием ствольной перегрузки запускается часовой механизм 2. По истечении предварительно установленного в часовом механизме времени он формирует импульс, который с выхода его поступает на электровоспламенители гироскопа инерциального 4 и батареи питания бортовой аппаратуры 21, при этом разарретируется гироскоп инерциальный 4 и выходит на режим батарея питания бортовой аппаратуры 21. При достижении номинального напряжения под действием последнего задействуются электровоспламенители батарей головки самонаведения 20 (служащей для питания ее электронной аппаратуры), 18 (служащей для питания обмоток коррекции) и 19 (служащей для питания фотоприемного устройства). Эти батареи выходят на режим и под действием напряжения на батарее 18 взводится электровоспламенитель блока носового 3 и последний отстреливается, открывая входной зрачок головки самонаведения для приема входных сигналов, отраженных от цели.
При подлете к зоне захвата головка принимает сигналы, отраженные от цели, и после их анализа вырабатывает сигнал "Захват" и команды управления по каналам "+Y" "-Y", "+Z", "-Z".
Под действием сигнала "Захват", поступающего через первый усилитель мощности 9 на электровоспламенитель механизма раскрытия рулей рулевого привода 5, последние раскрываются.
Одновременно сигнал "Захват" поступает на первый вход схемы И 7, разрешая прохождение сигнала компенсации силы тяжести с выхода 2 ламельного датчика через ее второй вход на вход "Компенсация" головки самонаведения и на второй вход схемы ИЛИ 8, на первый вход которой поступает сигнал "-Y" с выхода головки самонаведения. С выхода схемы ИЛИ 8 сигнал "-У поступает на второй усилитель мощности 10.
На входы третьего, четвертого и пятого усилителей мощности поступают соответственно сигналы "+Y", "+Z" и "-Z".
С выходов усилителей мощностей 10-13 сигналы управления поступают на первые входы соответствующих обмоток управления 14-17, вторые входы которых соединены с источником питания бортовой аппаратуры управления 21.
Под действием этих сигналов происходит отклонение рулей и тем самым наведение снаряда на цель.
При этом исключено время работы рулевого привода в режиме удержания нуля от момента раскрытия рулей до поступления сигнала "Захват", что позволило исключить влияние работы рулей на полет снаряда на неуправляемом участке и тем самым повысить точность его наведения.
Источник информации
"152-мм выстрелЗВОФ64(ЗВОФ93) с осколочно фугасным управляемым снарядом ЗОФ39 и зарядом 1 (Уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации ЗВОФ64.00.00.000ТО (ЗВОФ93.00.00.000ТО)". Москва. Военное издательство. 1990г., стр. 56-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315944C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМ УПРАВЛЯЕМЫМ СНАРЯДОМ | 1999 |
|
RU2165589C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Технический результат - повышение точности наведения. Технический результат достигается тем, что в известном способе взведения бортовых систем управляемого снаряда, заключающемся в том, что под действием ствольной перегрузки запускают часовой механизм, по истечении времени, установленного в часовом механизме, разарретируют гироскоп инерциальный и взводят батарею питания бортовой аппаратуры, а от нее последовательно взводят батареи питания головки самонаведения. При выходе на режим одной из батарей питания головки самонаведения отстреливают блок носовой, открывая входной зрачок головки самонаведения. Раскрытие рулей рулевого привода осуществляют по сигналу "Захват", формируемому головкой самонаведения после начала приема ею сигналов, отраженных от цели. 1 ил.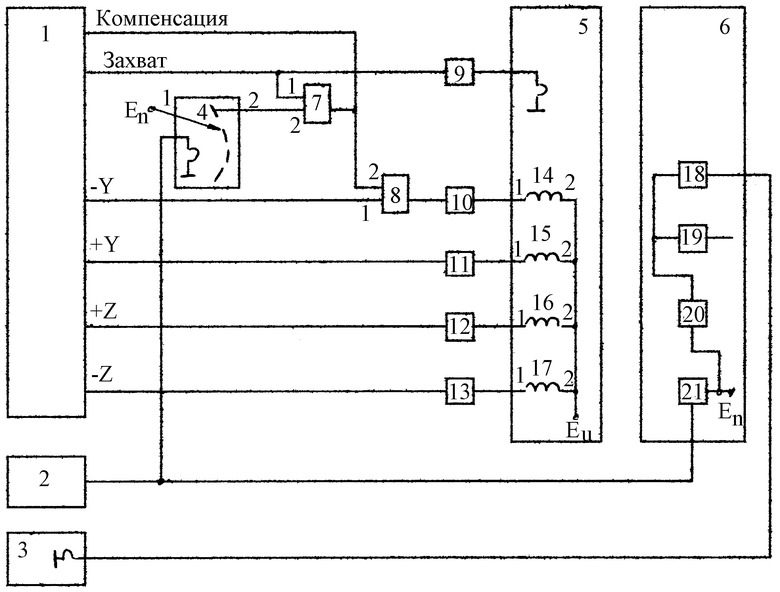
Способ взведения бортовых систем управляемого снаряда, заключающийся в том, что под действием ствольной перегрузки запускают часовой механизм, по истечении времени, установленного в часовом механизме, разарретируют гироскоп инерциальный и взводят батарею питания бортовой аппаратуры, от нее последовательно взводят батареи питания головки самонаведения, при выходе на режим одной из батарей питания головки самонаведения отстреливают блок носовой, открывая входной зрачок головки самонаведения, раскрывают рули рулевого привода, отличающийся тем, что рули рулевого привода раскрывают по сигналу "Захват", формируемому головкой самонаведения после начала приема ею сигналов, отраженных от цели.
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| - М.: Военизд, 1990 | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| US 4588145, 13.05.1986 | |||
| DE 3414911 A1, 24.10.1985 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРЯЖЕННОГО СОСТОЯНИЯ КОНСТРУКЦИЙ ЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2003 |
|
RU2226641C1 |
