Предлагаемое техническое решение относится к области космической техники и может быть использовано при зондировании атмосферы Земли с борта космического аппарата (КА). Ряд атмосферных явлений наиболее ярко проявляется при наблюдении из космоса в направлении горизонта Земли. В связи с этим оптические исследования атмосферы у видимого с КА горизонта Земли имеют важное научное и прикладное значение (см. [1], [2], [3]).
Известен способ управления ориентацией КА, принятый за аналог, при котором разворачивают КА до совмещения оси чувствительности закрепленного на КА прибора зондирования с направлением на Солнце и выполняют зондирование атмосферы Земли в моменты захода Солнца за видимый с КА горизонт Земли (см. [2], стр.107-127). В данном способе строится и поддерживается одноосная ориентация КА относительно инерциального пространства. Управление ориентацией КА осуществляется с помощью системы управления движением и навигацией (СУДН) КА (см. [4], стр.175), в состав которой входят КА, датчики угловых скоростей и углов, усилительно-преобразующее устройство, исполнительные устройства и органы управления.
Недостаток указанного способа управления ориентацией КА заключается в том, что в его действиях не учитывается особенности системы управления ориентацией КА, что не позволяет эффективно расходовать топливо на построение и поддержание требуемой ориентации КА. Рассмотрим КА, в системе управления движением ориентацией которых, наряду с реактивными двигателями ориентации (ДО), используются инерционные исполнительные органы - силовые гироскопы (СГ). В этом случае при выполнении разворота и поддержании ориентации КА происходит накопление кинетического момента (КМ) ГС и по достижении КМ заданных граничных значений выполняется операция «разгрузки» ГС -приведения КМ в допустимые пределы с помощью ДО. При этом при выполнении разгрузки ГС требуется дополнительное рабочее тело (топливо) для работы ДО КА.
Известны способы и системы управления ориентацией КА при выполнении номинальной программы полета и экспериментов на КА, обеспечивающие благоприятные условия для работы системы СГ, такие, чтобы максимально уменьшать эффект «насыщения» СГ и тем самым избегать или, по крайней мере, уменьшать необходимость их разгрузки (см. [5]; [6], стр.41; [7], стр.295-298).
Наиболее близким из аналогов, принятым за прототип, является способ управления ориентацией КА, описанный в [6], стр.41. В данном способе при построении ориентации КА для выполнения полетных операций осуществляют разворот КА до совмещения оси минимального момента инерции (ММИ) КА с направлением нормали к плоскости орбиты КА. При такой ориентации оси ММИ КА в пространстве действующий на КА гравитационный момент минимален и, как следствие, эффект «насыщения» СГ незначителен и требуется минимальный расход рабочего тела на их разгрузку. Данная ориентация, например, используется при выполнении полетных операций на международной космической станции (МКС) (см. [9], раздел 3.2.6.1.11 «Таблица полетных ориентаций»).
Данный способ реализуется активной комбинированной системой ориентации и стабилизации КА с двигателями и блоком трехстепенных гироскопов (см. [6], стр.194), включающей измерительное устройство (ИУ), усилительно-преобразующее устройство (УПУ), двигатели-маховики (ДМ), тахометры двигателей-маховиков (ТДМ), переключающее устройство (ПУ), разгрузочное устройство (РУ), КА с установленным на нем прибором для выполнения эксперимента, при этом выход ИУ соединен с входом УПУ, выход которого соединен с входом ДМ, первый выход которого соединен с входом РУ, выход которого соединен с входом ПУ, выход которого соединен с входом ТДМ, выход которого вместе со вторым выходом ДМ соединены через узел суммирования с КА.
Система функционирует следующим образом.
Построение требуемой ориентации и стабилизация КА при выполнении полетных операций (и, в частности, сеанса эксперимента по зондированию атмосферы Земли установленным на КА прибором зондирования) обеспечивается функционированием контура управления, включающем маховики, которые создают управляющие моменты по осям КА в соответствии с сигналами ИУ, предварительно обработанными УПУ. УПУ вычисляет командные сигналы, обеспечивающие управление рамами кардановых подвесов блока трехстепенных гироскопов при насыщении того или иного маховика либо при необходимости выполнения поворотного маневра (изменения ориентации КА). При насыщении маховиков гироскопическое устройство прикладывает к КА момент того знака, чтобы маховики для его компенсации создавали момент динамической реакции в процессе торможения.
В общем случае, блок гироскопов, снимая насыщение маховиков, сам насыщается и требует периодической разгрузки. При этом разгрузка СГ осуществляется устройствами, создающими внешний момент, - реактивными ДО. В соответствии с сигналами тахометров о величине КМ маховиков по каждой из связанных осей ПУ определяет факт насыщения, направление потребного разгрузочного момента по данной оси, момент включения и выключения РУ и величину разгрузочного момента. РУ создает по этой оси внешний момент. Контур управления с ДМ создает момент противоположного знака, сохраняя ориентацию КА. При этом КМ соответствующего маховика уменьшается. При достижении КМ маховика определенной величины происходит выключение РУ.
Но, учитывая что в данном способе ось ММИ КА ориентируется по направлению нормали к плоскости орбиты КА, то, как уже отмечалось, эффект «насыщения» СГ незначителен и разгрузки СГ в течение времени реализации эксперимента, как правило, не требуется.
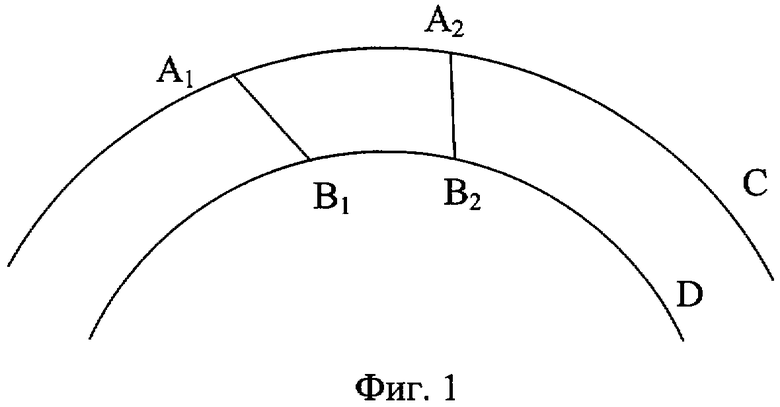
Способ и система для его осуществления, принятые за прототип, имеют существенный недостаток - они не позволяет учитывать различия сеансов выполняемых экспериментов по объему получаемой в них полезной информации. Объем полезной научной информации, получаемый в экспериментах по зондированию атмосферы Земли с КА, пропорционален длительности зондирования - длительности «прохождения» Солнца через атмосферу Земли, при этом данная длительность может существенно различаться в разных сеансах зондирования. На фиг.1 представлена схема прохождения Солнца через атмосферу Земли при проведении ее зондирования с КА и обозначено:
D - видимый с КА горизонт Земли;
С - верхняя граница атмосферы Земли;
Аi, Bi - точки соответственно «входа» Солнца в атмосферу Земли и «захода» Солнца за горизонт Земли для различных возможных реализаций сеансов зондирования.
При этом объем получаемой в сеансе зондирования атмосферы полезной информации пропорционален длине отрезка [Ai, Вi].
Кроме того, для применения данного способа и системы необходимо, чтобы прибор зондирования мог быть повернут относительно строительных осей КА, находящегося в указанной ориентации, до совмещения оси чувствительности прибора зондирования с направлением на Солнце, т.е. допускал установку, в общем случае, в произвольное положение относительно строительных осей КА. Но на практике прибор зондирования либо устанавливается так, что его ось визирования (чувствительности) принимает фиксированные положения относительно КА, либо ось визирования прибора имеет ограниченные углы «прокачки» относительно строительных осей КА. Данный способ не позволяет учитывать особенности установки прибора зондирования, что существенно ограничивает область его применения. С другой стороны, это обстоятельство влечет за собой необходимость выполнения дополнительного разворота КА для совмещения оси визирования прибора зондирования и направлением на Солнце, который приведет к достаточно большим отклонениям оси ММИ КА от нормали к плоскости орбиты, что приведет к насыщению СГ и потребует дополнительного расхода рабочего тела КА на их разгрузку.
Наряду с этим для обеспечения функционирования КА при реализации сеанса зондирования атмосферы требуется наличие необходимого количества электроэнергии, вырабатываемой СБ КА. Данные технические решения не позволяют учитывать этот фактор, что может привести к необходимости расхода дополнительных энергетических ресурсов КА, а при их недостаточном количестве - к срыву реализации или отказу от выполнения сеанса зондирования.
Задачей, стоящей перед предлагаемыми способом и системой, является увеличение объема получаемой при зондировании атмосферы Земли полезной информации при минимизации требуемых энергетических затрат орбитального КА, движущегося по околокруговой орбите, с инерционными исполнительными органами.
Технический результат достигается тем, что в способе управления ориентацией орбитального космического аппарата с инерционными исполнительными органами при зондировании атмосферы Земли, включающем выставку оси визирования прибора зондирования относительно строительных осей космического аппарата, разворот космического аппарата до совмещения оси визирования прибора зондирования с направлением на Солнце, разворот космического аппарата до совмещения оси его минимального момента инерции с направлением, перпендикулярным плоскости его орбиты, стабилизацию космического аппарата и выполнение зондирования атмосферы Земли в моменты захода Солнца за видимый с космического аппарата горизонт Земли, дополнительно измеряют высоту орбиты космического аппарата, выставляют ось визирования прибора зондирования от направления оси минимального момента инерции космического аппарата в сторону, соответствующую наибольшему съему электроэнергии, на угловое расстояние, равное дополнению до 90° угла между направлением на нижнюю границу исследуемого слоя атмосферы Земли и направлением в центр Земли γо, определяемого соотношением
γо=arcsin ((Rz+Ho)/(Rz+Hорб)),
где Rz - радиус Земли,
Но - высота нижней границы исследуемого слоя атмосферы от поверхности Земли,
Норб - высота орбиты космического аппарата,
измеряют угол между направлением на Солнце и плоскостью орбиты космического аппарата, сравнивают значение угла между направлением на Солнце и плоскостью орбиты космического аппарата со значением угла между направлением на нижнюю границу исследуемого слоя атмосферы Земли и направлением в центр Земли γо и по их совпадению разворачивают космический аппарат до совмещения оси визирования прибора зондирования с направлением на Солнце при достижении минимального значения угла между осью минимального момента инерции космического аппарата и направлением, перпендикулярным плоскости орбиты космического аппарата, измеряют угол возвышения Солнца над видимым с космического аппарата горизонтом Земли, сравнивают значение угла возвышения Солнца над видимым с космического аппарата горизонтом Земли со значением угла возвышения верхней границы исследуемого слоя атмосферы над видимым с космического аппарата горизонтом Земли εв, определяемым соотношением
εв=arcsin ((Rz+Hв)/(Rz+Hорб))-arcsin(Rz/(Rz+Норб)),
где Нв - высота верхней границы исследуемого слоя атмосферы от поверхности Земли,
стабилизируют космический аппарат относительно инерциального пространства и выполняют зондирование атмосферы Земли в интервале времени, когда значение угла возвышения Солнца над видимым с космического аппарата горизонтом Земли меньше либо равно сравниваемому с ним значению.
При этом поставленная задача решается тем, что в систему управления ориентацией орбитального космического аппарата с инерционными исполнительными органами, включающую измерительное устройство, усилительно-преобразующее устройство, двигатели-маховики, тахометры двигателей-маховиков, переключающее устройство, разгрузочное устройство, космический аппарат с прибором зондирования, при этом выход измерительного устройства соединен с входом усилительно-преобразующего устройства, выход которого соединен с входом двигателей-маховиков, первый выход которого соединен с входом разгрузочного устройства, выход которого соединен с входом переключающего устройства, выход которого соединен с входом тахометров двигателей-маховиков, выход которого вместе со вторым выходом двигателей-маховиков соединены через узел суммирования с космическим аппаратом, соединенным с прибором зондирования, дополнительно введены блок измерения угла между направлением на Солнце и плоскостью орбиты, блок определения угла между направлением на нижнюю границу исследуемого слоя атмосферы и направлением в центр Земли; блок определения угла возвышения верхней границы исследуемого слоя атмосферы над видимым с космического аппарата горизонтом Земли, блок определения моментов времени построения ориентации для зондирования, блок измерения угла возвышения Солнца над видимым с космического аппарата горизонтом Земли, блок определения моментов времени зондирования атмосферы, элемент И, при этом выходы блока измерения угла между направлением на Солнце и плоскостью орбиты и блока определения угла между направлением на нижнюю границу исследуемого слоя атмосферы и направлением в центр Земли соединены с разными входами блока определения моментов времени построения ориентации для зондирования, выход которого соединен со вторым входом усилительно-преобразующего устройства и первым входом элемента И, а второй выход усилительно-преобразующего устройства соединен со вторым входом элемента И, причем выходы блока измерения угла возвышения Солнца над видимым с космического аппарата горизонтом Земли и блока определения угла возвышения верхней границы исследуемого слоя атмосферы над видимым с космического аппарата горизонтом Земли соединены с разными входами блока определения моментов времени зондирования атмосферы, выход которого соединен с третьим входом элемента И, а выходы элемента И и блока определения угла между направлением на нижнюю границу исследуемого слоя атмосферы и направлением в центр Земли соединены соответственно с вторым и третьим входами прибора зондирования.
Суть предлагаемого изобретения поясняется на фиг.1-7, на которых приведены: на фиг.1 - возможные схемы прохождения Солнца через атмосферу Земли при зондировании атмосферы по способу-прототипу; на фиг.2 - схема прохождения Солнца через атмосферу Земли при зондировании атмосферы по предлагаемому способу; на фиг.3 - схема, поясняющая действия предлагаемого способа по выставке оси визирования прибора зондирования (ПЗ) и построению ориентации КА для зондирования; на фиг.4 и 5 - схемы, поясняющие определение углов возвышения верхней и нижней границ исследуемого слоя атмосферы над Землей; на фиг.6 - схема, поясняющая определение угла возвышения линии визирования ПЗ над Землей в моменты выполнения зондирования атмосферы; на фиг.7 - блок-схема предложенной системы.
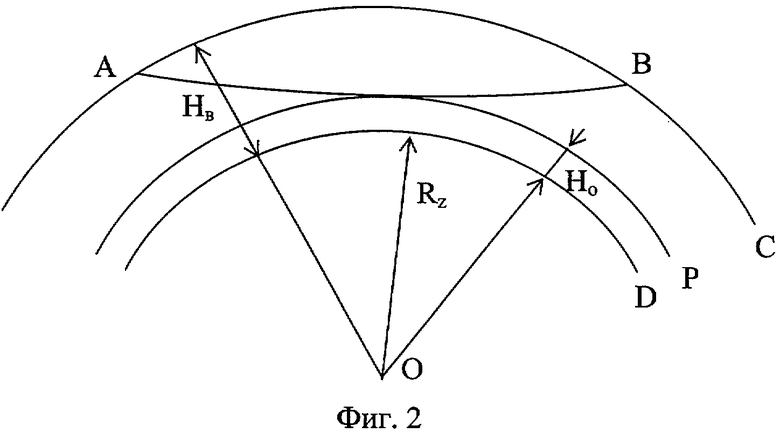
На фиг.2, представляющей схему прохождения Солнца через атмосферу по предлагаемому способу, в дополнение к обозначениям фиг.1 обозначено:
О - центр Земли;
Rz - радиус Земли;
Р - нижняя граница исследуемого слоя атмосферы Земли;
Но, Нв - высоты соответственно нижней и верхней границ исследуемого слоя атмосферы Земли, измеряемые от поверхности Земли;
А, В - точки «входа» и «выхода» Солнца из исследуемого слоя атмосферы Земли при наблюдении с КА за прохождением Солнца через исследуемый слой атмосферы Земли.
Исследуемый слой атмосферы задается высотой своих нижней и верхней границ от поверхности Земли, а объем получаемой полезной информации пропорционален длине пути «прохождения» Солнца по исследуемому слою атмосферы Земли, а именно длине линии [А, В].
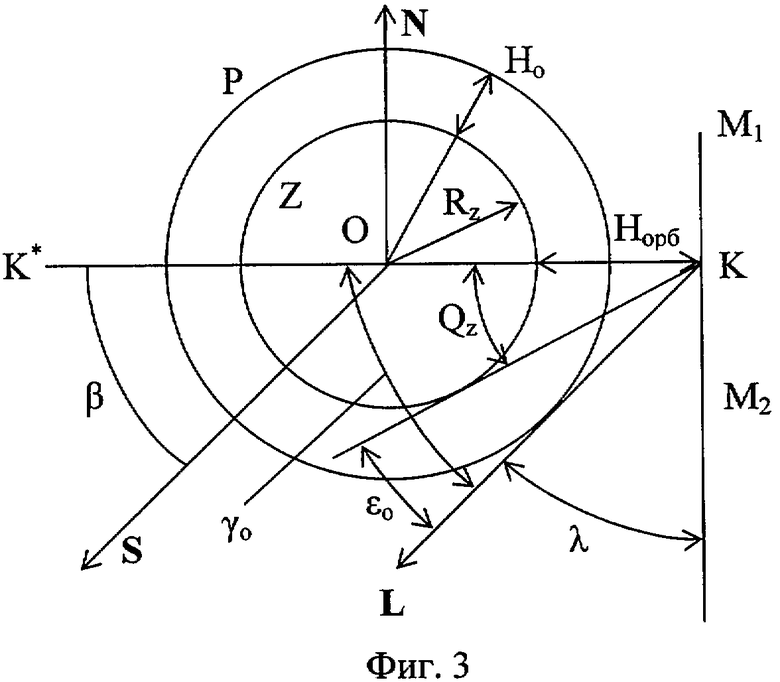
На фиг.3, поясняющей выставку оси визирования ПЗ и построение ориентации КА для зондирования, в добавление к обозначениям фиг.1 и 2 обозначено:
N - нормаль к плоскости орбиты КА;
S - вектор направления на Солнце;
KK* - плоскость витка орбиты КА;
K - положение КА в противосолнечной точке витка орбиты;
K* - положение КА в подсолнечной точке витка орбиты;
M1M2 - ось ММИ KA;
Z - Земля;
О - центр Земли;
Rz - радиус Земли;
Норб - высота орбиты КА.
Qz - видимый с КА угловой полураствор Земли;
L - вектор направления оси визирования ПЗ;
λ - угол между направлениями L и осью ММИ КА;
εo - угол возвышения нижней границы исследуемого слоя атмосферы над видимым с КА горизонтом Земли;
γо - угол между направлением на нижнюю границу исследуемого слоя атмосферы и направлением в центр Земли;
β - угол между направлением на Солнце и плоскостью орбиты.
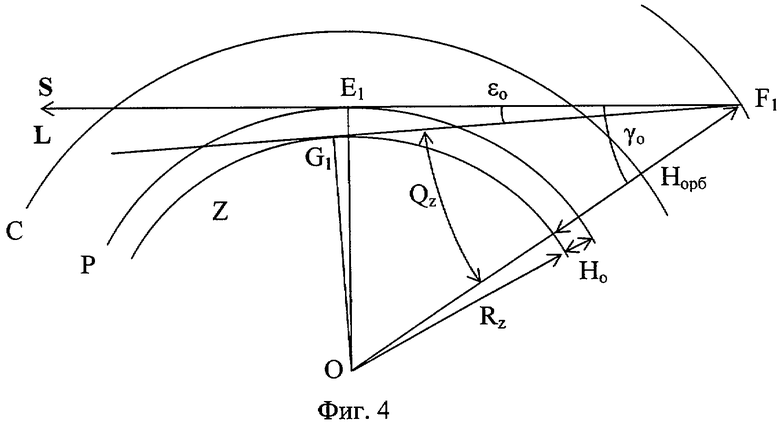
На фиг.4, поясняющей определение угла возвышения нижней границы исследуемого слоя атмосферы над видимым с КА горизонтом Земли, в добавление к обозначениям фиг.1-3 обозначено:
F1 - положение КА в момент касания линией визирования L нижней границы исследуемого слоя атмосферы;
Е1 - точка касания линией визирования L нижней границы исследуемого слоя атмосферы;
G1 - точка видимого из положения КА F1 горизонта Земли, расположенная в плоскости, образованной радиус-вектором КА и линией визирования L;
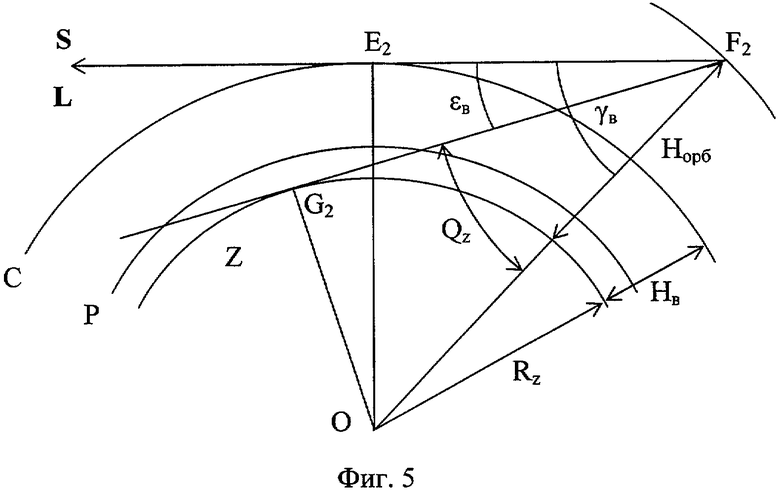
На фиг.5, поясняющей определение угла возвышения верхней границы исследуемого слоя атмосферы над видимым с КА горизонтом Земли, в добавление к обозначениям фиг.1-3 обозначено:
F2 - положение КА в момент касания линией визирования L верхней границы исследуемого слоя атмосферы;
Е2 - точка касания линией визирования L верхней границы исследуемого слоя атмосферы;
G2 - точка видимого из положения КА F2 горизонта Земли, расположенная в плоскости, образованной радиус-вектором КА и линией визирования L;
εв - угол возвышения верхней границы исследуемого слоя атмосферы над видимым с КА горизонтом Земли;
γв - угол между направлением на верхнюю границу исследуемого слоя атмосферы и направлением в центр Земли.
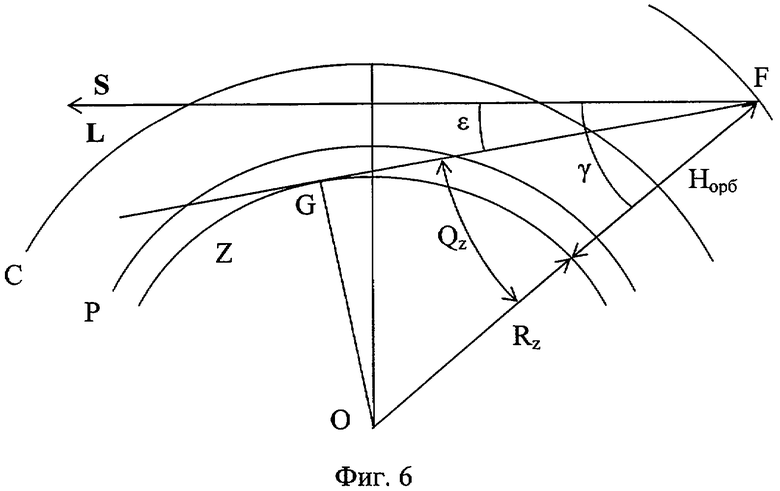
На фиг.6, поясняющей определение угла возвышения линии визирования ПЗ над Землей в момент выполнения зондирования атмосферы, в добавление к обозначениям фиг.1-3 обозначено:
F - положение КА в момент зондирования;
G - точка видимого из положения КА F горизонта Земли, расположенная в плоскости, образованной радиус-вектором КА и линией визирования L;
ε - угол возвышения линии визирования L над видимым с КА горизонтом Земли;
γ - угол между направлением линии визирования L и направлением в центр Земли.
Угол между направлением на Солнце и плоскостью орбиты КА β одновременно является минимальным значением, которое может принимать угол между направлением на Солнце и направлением в центр Земли в течение текущего витка орбиты КА, и равен углу между направлением на Солнце и направлением в центр Земли в противосолнечной точке витка (см. фиг.3). Поэтому на витках, когда угол β равен γо:

направление на Солнце в противосолнечной точке витка совпадает с направлением от КА на нижнюю границу исследуемого слоя атмосферы Земли. На фиг.3 это иллюстрируется совпадением векторов S и L. При этом

В сеансе зондирования направление оси визирования ПЗ совпадает с направлением S. Поэтому условие ориентации в течение сеанса зондирования оси ММИ КА перпендикулярно к плоскости орбиты КА, соответствует равенству угла между осью визирования ПЗ и осью ММИ КА λ и дополнению угла β (и равного ему угла γо) до 90° (см. фиг.3):

В предлагаемом способе зондирование атмосферы Земли выполняется на витках, на которых выполняется условие (1), так как только на данных витках реализуется максимально «долгое» прохождение Солнца через исследуемый слой атмосферы Земли - погружение Солнца в атмосферу Земли при заходе Солнца, непрерывно переходящее восходящее движение Солнца через атмосферу - линия [А, В] на фиг.2.
Моменты непосредственного зондирования определяются как моменты, соответствующие положениям КА F между положениями F1 и F2 (см. фиг.4-6), когда угол возвышения линии визирования L над видимым с КА горизонтом Земли ε находится в интервале

Учитывая, что на витках (1) ε всегда больше εо, то (4) принимает вид

Отметим, что положение КА F1 (фиг.4) соответствует положению КА в противосолнечной точке К (фиг.3); точка E1 (фиг.4) - середине линии [А, В] (фиг.2); точка Е2 (фиг.5) - точкам А и В (фиг.2).
Угол γо определяется по формуле (см. фиг.4)

Угол εв определяется по формуле (см. фиг.5)


В предлагаемом способе осуществляется построение такой ориентации КА, при которой ось визирования ПЗ направлена на Солнце, а ось ММИ КА практически направлена по нормали к плоскости орбиты КА - угловое рассогласование между этими направлениями обнуляется с точностью задания величины угла γо по (6) и точностью сравнения углов γо и β (1). Точность задания угла γо определяется как точностью задания высоты нижней границы исследуемого слоя атмосферы Но и высоты орбиты КА Норб, так и требуемой точностью дальнейшего использования данного угла. Суммарно рассогласование между осью ММИ КА и нормалью к плоскости орбиты КА N может достигать нескольких градусов, что является приемлемым и достаточным для решения поставленной задачи.
На фиг.7, представляющей блок-схему предложенной системы, обозначено:
1 - ИУ; 2 - УПУ; 3 - ДМ; 4 - КА; 5 - ТДМ; 6 - ПУ; 7 - РУ;
8 - прибор зондирования (ПЗ);
9 - блок измерения угла между направлением на Солнце и плоскостью орбиты (БИУСПО);
10 - блок определения угла между направлением на нижнюю границу исследуемого слоя атмосферы и направлением в центр Земли (БОУНГАЦЗ);
11 - блок определения моментов времени построения ориентации для зондирования (БОМВПОЗ);
12 - блок измерения угла возвышения Солнца над видимым с КА горизонтом Земли (БИУВСВГЗ);
13 - блок определения угла возвышения верхней границы исследуемого слоя атмосферы над видимым с КА горизонтом Земли (БОУВВГАВГЗ);
14 - блок определения моментов времени зондирования атмосферы (БОМВЗА);
15 - элемент И.
При этом выход ИУ (1) соединен с первым входом УПУ (2), первый выход которого соединен с входом ДМ (3), первый выход которого соединен с входом РУ (7), выход которого соединен с входом ПУ (6), выход которого соединен с входом ТДМ (5), выход которого вместе со вторым выходом ДМ (3) соединены через узел суммирования с КА (4). Выходы БОУНГАЦЗ (10) и БИУСПО (9) соединены соответственно с первым и вторым входами БОМВПОЗ (11). Выход БОМВПОЗ (11) соединен со вторым входом УПУ (2) и первым входом элемента И (15). Второй выход УПУ (2) соединен со вторым входом элемента И (15). Выходы БИУВСВГЗ (12) и БОУВВГАВГЗ (13) соединены соответственно с первым и вторым входами БОМВЗА (14). Выход БОМВЗА (14) соединен с третьим входом элемента И (15). Выходы КА (4), элемента И (15) и БОУНГАЦЗ (10) соединены соответственно с первым, вторым и третьи входами ПЗ (8).
Система функционирует следующим образом.
БОУНГАЦЗ (10) и БОУВВГАВГЗ (13) по соотношениям (6) и (8) определяют значения углов γо и εв (полагаем, что на рассматриваемом этапе полета КА высота орбиты КА поддерживается на постоянном уровне) и подают их на первые входы соответственно БОМВПОЗ (11) и БОМВЗА (14). Значение угла γо с БОУНГАЦЗ (10) подается также на ПЗ (8), и ось визирования ПЗ в строительных осях КА выставляют на угловое расстояние 90°-γо от направления оси ММИ КА в сторону, соответствующую наибольшему съему электроэнергии с СБ.
БИУСПО (9) измеряет значение угла β и подает его на второй вход БОМВПОЗ (11).
БИУВСВГЗ (12) измеряет значение угла ε и подает его на второй вход БОМВЗА (14).
БОМВПОЗ (11) определяет моменты времени выполнения построения требуемой при зондировании атмосферы Земли ориентации КА путем сравнения углов β и γо. При выполнении соотношения (1) БОМВПОЗ (11) генерирует команду на построение ориентации КА для зондирования, которая подается на второй вход УПУ (2) и на первый вход элемента И (15). По данной команде УПУ (2) осуществляет построение требуемой для выполнения сеанса зондирования атмосферы ориентации КА.
Построение требуемой ориентации (трехосная ориентация, при которой ось визирования ПЗ совпадает с направлением на Солнце при минимальном угле между осью ММИ КА и направлением нормали к плоскости орбиты КА) и последующая стабилизация КА при выполнении сеанса зондирования обеспечивается функционированием контура управления, включающем маховики, которые создают управляющие моменты по осям КА в соответствии с сигналами ИУ (1), предварительно обработанными УПУ (2). УПУ (2) вычисляет командные сигналы, обеспечивающие управление рамами кардановых подвесов блока гироскопов при выполнении требуемого поворотного маневра КА.
Если блок гироскопов, снимая насыщение маховиков, «насытится», то с помощью реактивных ДО РУ (7) осуществится его разгрузка: в соответствии с сигналами тахометров о величине КМ маховиков ПУ (6) определяет факт насыщения и уставки для работы РУ (7), по которым РУ (7) создает требуемый внешний момент. Но, учитывая, что в данном способе ось ММИ КА ориентируется по направлению нормали к плоскости орбиты КА, то, как отмечалось ранее, эффект «насыщения» СГ отсутствует и разгрузка СГ в течение времени реализации эксперимента не требуется (см. описание в [5]; [6], стр.41, 194).
После построения требуемой ориентации УПУ (2) на своем втором выходе генерирует сигнал о построении требуемой ориентации и подает его на второй вход элемента И (15).
БОМВЗА (14) определяет моменты времени непосредственного зондирования атмосферы путем сравнения углов ε и εв. При выполнении соотношения (5) с выхода БОМВЗА (14) информация о моментах времени выполнения зондирования поступает на третий вход элемента И (15).
Элемент И (15) при поступлении на его входы всех трех сигналов (о совпадении углов β и γо, о построении требуемой ориентации КА и о достижении моментов времени выполнения зондирования) генерирует и подает на ПЗ (8) команду на непосредственное выполнение зондирования.
БИУСПО (9) и БИУВСВГЗ (12) могут быть выполнены на основе оптических визиров и датчиковой аппаратуры СУДН КА и системы орбитальных траекторных измерений (см. [4], [8]). БОУНГАЦЗ (10), БОУВВГАВГЗ (13) могут быть выполнены в виде вычислителя на базе бортовой цифровой вычислительной системы (БЦВС) КА. БОМВПОЗ (11), БОМВЗА (14) могут быть выполнены в виде набора схем сравнения и реализованы в виде вычислителя на базе БЦВС КА. Элемент И (15) может быть выполнен в виде элементарного аналогового элемента.
Таким образом, рассмотрен пример реализации основополагающих блоков системы, по результатам которых принимается решение и реализуются предложенные операции.
Опишем технический эффект предлагаемого изобретения.
Предлагаемые способ и система позволяют за один сеанс зондирования атмосферы Земли получить максимально большой объем полезной информации. Увеличение информативности зондирования достигается за счет обеспечения «прохождения» Солнца через атмосферу Земли по касательной к линии горизонта (или нижней границе исследуемого слоя атмосферы), что в несколько раз увеличивает длительность и, следовательно, информативность зондирования по сравнению с прототипом.
Кроме того, при выполнении сеанса зондирования атмосферы выполняется ориентация оси ММИ КА в пространстве, при которой на КА не действует гравитационный момент и не накапливается КМ ГС, что позволяет не расходовать топливо на разгрузку ГС.
Наряду с этим для обеспечения функционирования КА при реализации сеанса зондирования требуется наличие необходимого количества электроэнергии, вырабатываемой СБ КА. Операция выставки оси визирования ПЗ обеспечивает ее выставку в направлении наибольшего съема электроэнергии с СБ. Поскольку ПЗ ориентируется на Солнце, то предложенная выставка его оси визирования гарантирует съем электроэнергии с СБ КА в течение сеанса зондирования.
Например, рассмотрим выполнение исследований атмосферы Земли с КА типа орбитальных станций (см. [1], [2], [3], [9]) - «Салют», «Мир», МКС, СБ которых, в частности, обеспечивают номинальный съем электроэнергии с направления строительной оси «+Х», соосной направлению оси ММИ, а высота орбиты составляет порядка 400 км. При данной высоте угол γo, определяемый соотношением (6), составляет не менее 70°, в этом случае угол отворота оси визирования ПЗ от оси ММИ КА λ, определяемый (3), составляет менее 20°. Такое направление освещения СБ является благоприятным для съема электроэнергии на КА этого класса.
Таким образом, предлагаемые способ и система позволяют за один сеанс зондирования атмосферы Земли получить максимально большой объем полезной информации при минимальных энергетических затратах КА.
ЛИТЕРАТУРА
1. Демин Л.С., Сарафанов Г.В. Наблюдения из космоса // Авиация и космонавтика. 1975, №9.
2. Оптические исследования излучения атмосферы, полярных сияний и серебристых облаков с борта орбитальной станции "Салют-4" // Издательство АН ЭССР, Тарту, 1977.
3. Лазарев А.И., Коваленок В.В., Авакян С.В. Исследование Земли с пилотируемых космических кораблей // Ленинград. Гидрометеоиздат, 1987.
4. Инженерный справочник по космической технике // Изд-во МО СССР, М., 1977.
5. Ковтун B.C., Платонов В.Н., Суханов Н.А., Величкин С.Б., Гусев С.И. Система управления ориентацией космического аппарата с силовыми гироскопами. Патент РФ 2006430 по заявке 5032611/22 от 17.03.92 г.
6. Бебенин Г.Г., Скребушевский Б.С., Соколов Г.А. Системы управления полетом космических аппаратов // М.: Машиностроение, 1978.
7. Скребушевский Б.С. Управление полетом беспилотных космических аппаратов // М.: «Владмо», 2003.
8. Система управлением движением и навигации КА. Техническое описание. 300ГК.12Ю. 0000-АТО. РКК «Энергия», 1998.
9. Спецификация Российского сегмента. Программа Международная космическая станция. SSP 41163. Редакция Н, 27.01.2001.
Изобретение относится к области управления космическим аппаратом (КА). Согласно предлагаемому способу стабилизируют КА и зондируют атмосферу Земли в моменты захода Солнца за видимый с КА горизонт Земли. При этом разворачивают КА осью его минимального момента инерции перпендикулярно плоскости орбиты. Измеряют высоту орбиты КА и выставляют ось визирования прибора зондирования (ПЗ) в сторону, соответствующую наибольшему съему электроэнергии с солнечных батарей КА, на определенное угловое расстояние от оси минимального момента инерции КА. Измеряют угол между направлением на Солнце и плоскостью орбиты КА и сравнивают этот угол с углом между направлением на нижнюю границу исследуемого слоя атмосферы и направлением на центр Земли. При их совпадении и минимальном значении угла между осью минимального момента инерции КА и нормалью к плоскости орбиты разворачивают КА до совмещения оси визирования ПЗ с направлением на Солнце. Измеряют угол возвышения Солнца над указанным видимым горизонтом и сравнивают этот угол со значением угла возвышения над горизонтом верхней границы исследуемого слоя атмосферы Земли. В период, когда угол возвышения Солнца меньше или равен сравниваемому с ним значению, выполняют зондирование атмосферы Земли. Предлагаемая система управления включает в себя необходимые блоки и связи между ними для выполнения описанных выше операций. Причем в нее введены блоки измерения упомянутых выше углов и определения моментов зондирования атмосферы и построения соответствующей ориентации КА. Технический результат изобретения состоит в увеличении информативности зондирования атмосферы Земли при минимальных энергетических затратах на борту КА. 2 н.п. ф-лы, 7 ил.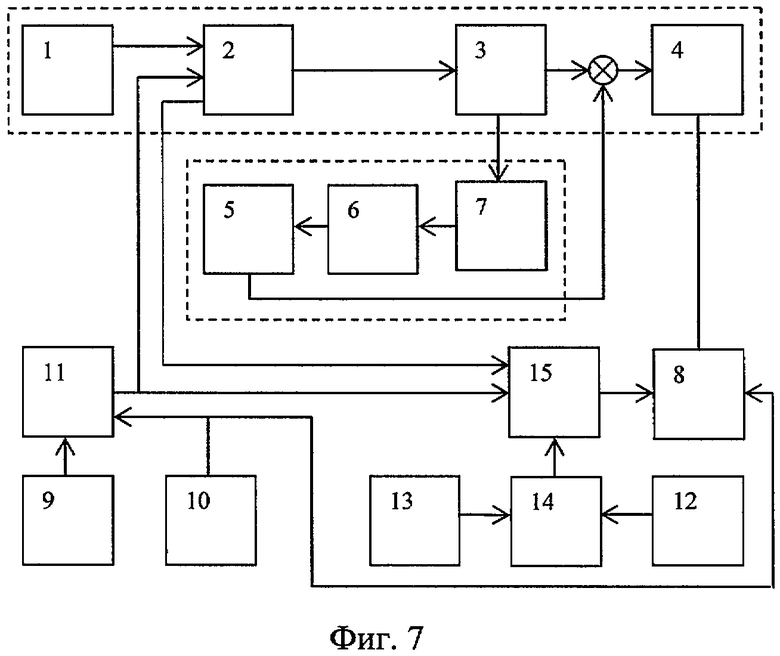
γo=arcsin((Rz+Ho)/(Rz+Hобр)),
где Rz - радиус Земли,
Но - высота нижней границы исследуемого слоя атмосферы от поверхности Земли,
Норб - высота орбиты космического аппарата,
измеряют угол между направлением на Солнце и плоскостью орбиты космического аппарата, сравнивают значение угла между направлением на Солнце и плоскостью орбиты космического аппарата со значением угла γo между направлением на нижнюю границу исследуемого слоя атмосферы Земли и направлением в центр Земли и при их совпадении разворачивают космический аппарат до совмещения оси визирования прибора зондирования с направлением на Солнце при достижении минимального значения угла между осью минимального момента инерции космического аппарата и направлением, перпендикулярным плоскости орбиты космического аппарата, измеряют угол возвышения Солнца над видимым с космического аппарата горизонтом Земли, сравнивают значение указанного угла возвышения Солнца со значением угла возвышения верхней границы исследуемого слоя атмосферы над видимым с космического аппарата горизонтом Земли εв, определяемого соотношением
εв=arcsin((Rz+Hв)/(Rz+Hобр))-arcsin(Rz/(Rz+Норб)),
где Нв - высота верхней границы исследуемого слоя атмосферы от поверхности Земли,
стабилизируют космический аппарат относительно инерциального пространства и выполняют зондирование атмосферы Земли в интервале времени, когда значение угла возвышения Солнца над видимым с космического аппарата горизонтом Земли меньше либо равно сравниваемому с ним значению.
| БЕБЕНИН Г.Г., СКРЕБУШЕВСКИЙ Б.С., СОКОЛОВ Г.А | |||
| Системы управления полетом космических аппаратов | |||
| - М.: Машиностроение, 1978, с.41, 194 | |||
| СИСТЕМА УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ | 1992 |
|
RU2006430C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА, СНАБЖЕННОГО БОРТОВЫМ РАДИОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2001 |
|
RU2191721C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2001 |
|
RU2207969C2 |
| US 4358076 A, 09.11.1982 | |||
| US 6019320 A, 01.02.2000 | |||
| СПОСОБ ИЗВЛЕЧЕНИЯ МАГНИЯ ИЗ ПРИРОДНЫХ КРЕМНИЙСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2006 |
|
RU2318888C1 |

