Изобретение относится к космической технике, а более конкретно - к системам управления ориентацией космических аппаратов (КА), в которых исполнительными органами являются силовые гироскопы (СГ).
Известна цифровая система стабилизации орбитальной космической станции "Скайлаб", в которой основными исполнительными органами системы ориентации являются силовые гироскопы.
В качестве основных исполнительных органов системы стабилизации используются трехстепенные силовые гироскопы, для разгрузки которых от накопленного кинетического момента в момент "насыщения" системы применяются реактивные двигатели ориентации (ДО).
Основным недостатком в работе рассматриваемой системы управления является то, что построение сеансов ориентации, включающих режимы поддержaния заданной ориентации и режимы разгрузки силовых гироскопов с помощью ДО, происходит в определенной степени случайным образом. Это приводит к потере необходимой точности режима поддержания заданной ориентации.
Поскольку разгрузки неизбежны, проведение ряда экспериментов необходимо планировать на время между ними.
Система управления КА с учетом оценки "насыщения" гироскопической системы, рассчитываемого по аналитическим формулам, принимается авторами за прототип к предлагаемому изобретению как наиболее близкая по технической сущности.
Уравнения и логика, заложенные в программу рассматриваемой системы управления для прототипа, должны выполнять три основные функции:
1) построение требуемой ориентации КА;
2) поддержание заданной ориентации путем стабилизации пространственного положения КА;
3) формирование команд для разгрузки СГ.
Наиболее часто для разгрузки СГ от "насыщения" используется гравитационный момент, который для орбитальных КА гантельного типа выше на порядок по величине по сравнению с другими моментами, действующими на корпус КА (аэродинамическим, магнитным и т. д. ).
Задача разгрузки заключается в совмещении в инерциальном пространстве вектора гравитационного момента с противоположным направлением от вектора накопленного кинетического момента и поддерживании полученной ориентации.
В системе возможен долгосрочный прогноз изменений вектора кинетического момента, накопленного в системе СГ, для перехода к разгрузке на интервале Δ t по выражению (t)=
(t)=  -
- (t)
(t) M
M (t)dt, (1) где
(t)dt, (1) где  - измеренное на момент начала прогноза t0 значение суммарного вектора кинетического момента КА;
- измеренное на момент начала прогноза t0 значение суммарного вектора кинетического момента КА; (t) - необходимые изменения вектора кинетического момента КА для проведения текущего режима ориентации на интервале Δt;
(t) - необходимые изменения вектора кинетического момента КА для проведения текущего режима ориентации на интервале Δt; (t) - главный вектор внешнего возмущающего момента, действующего на корпус КА.
(t) - главный вектор внешнего возмущающего момента, действующего на корпус КА.
Для разгрузки СГ используется гравитационный момент. Гравитационная разгрузка состоит из чередования режимов разворота и поддержания требуемой ориентации. И первым при этом является режим разворота. Поскольку можно выполнять разворот в двух направлениях - в сторону кратчайшего угла конечного поворота и противоположную ему сторону, то накопленный кинетический момент может еще и способствовать повышению темпа разворота, так как существует в системе СГ "больший резерв" для передачи кинетического момента корпусу КА. Интервал прогноза Δ t позволяет включать в себя время последовательности режимов, обеспечивающих выполнение целого ряда экспериментов. По долгосрочному прогнозу судят о необходимых запасах кинетического момента на предстоящую динамическую операцию и могут назначать режимы разгрузки до начала основных частей сеансов ориентации, направленных на непосредственное выполнение программы полета в случаях, когда запас кинетического момента недостаточен.
Основным недостатком в работе рассмотренной системы является то, что она производит построение сеансов ориентации (СО) только с учетом ограничений по области S располагаемых значений вектора кинетического момента на основе прогноза накопления вектора кинетического момента в системе СГ и не учитывает возможные структурные построения с учетом зон проведения экспериментов.
Возникает также вопрос, каким образом проводить построение СО в случаях, когда зоны проведения экспериментов пересекаются или отстоят друг от друга на интервалах времени, меньших или больших, чем требуется для программного разворота. Причем выбор момента начала разворота в каждом случае, а также структура построения СО с постановкой "промежуточных" режимов не безразлична с точки зрения продолжительности последующего эксперимента, так как то или иное перестроение сеанса приводит к своим изменениям  (t) и, следовательно, влияет на продолжительность последующих ориентаций, поскольку определяет начальные условия
(t) и, следовательно, влияет на продолжительность последующих ориентаций, поскольку определяет начальные условия  для их проведения.
для их проведения.
Целью изобретения является обеспечение максимальной продолжительности проведения экспериментов на фиксированных интервалах полетного времени за счет учета на основе прогноза возможных вариаций вектора кинетического момента в системе СГ на указанных интервалах при пересечении зон проведения экспериментов или отстоянии указанных зон друг от друга на интервалах времени меньших или больших, чем требуется для переориентации КА с помощью СГ.
Предложенная система позволяет на фиксированных интервалах полетного времени КА при управлении им с помощью СГ обеспечить максимальную продолжительность режимов ориентации, направленных на выполнение номинальной программы полета. Так в случаях пересечения временных зон проведения динамических экспериментов вновь введенные блоки системы позволяют выбрать момент времени начала режимов переориентации КА, позволяющий сократить до минимального значения само время переориентации и тем самым обеспечить максимальную продолжительность двух смежных режимов поддержания ориентации номинальной программы экспериментов. А на участках зон между динамическими экспериментами получить минимально накопленные значения вектора кинетического момента в системе СГ  (t), максимально увеличив тем самым
(t), максимально увеличив тем самым  (t) для последующих управлений КА и, следовательно, максимально увеличив продолжительность экспериментов до "насыщения" системы СГ.
(t) для последующих управлений КА и, следовательно, максимально увеличив продолжительность экспериментов до "насыщения" системы СГ.
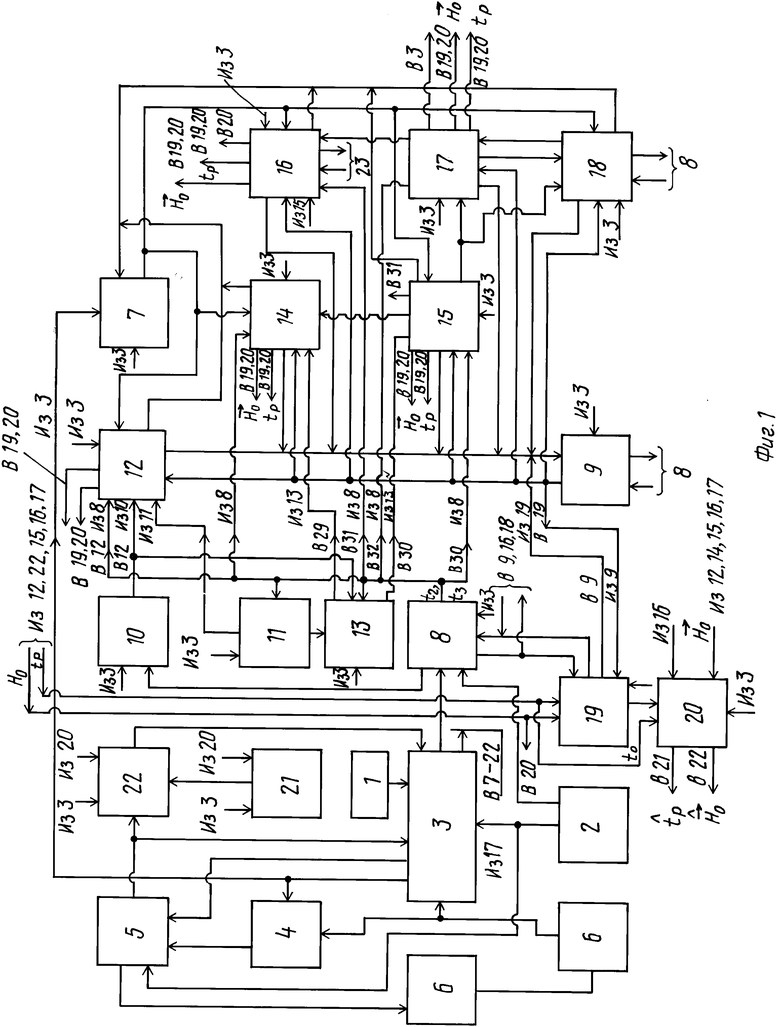
Блок-схема предлагаемой системы представлена на фиг. 1, где показаны: 1- блок датчиков внешней информации, 2 - блок задания параметров КА и внешней среды, 3 - блок оценки динамического состояния КА, внешней среды и системы управления, 4 - блок сравнения прогнозируемых и располагаемых значений кинетического момента, 5 - блок силовых гироскопов, 6 - блок датчиков угловой скорости, 7 - блок прогнозируемых значений вектора кинетического момента системы СГ, 8 - блок определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации, 9 - блок моделирования программного разворота КА, 10 - блок определения минимально возможной продолжительности разворота, 11 - блок определения интервалов пересекающихся зон ориентации, 12- блок определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, 13 - блок определения интервалов непересекающихся зон ориентации, 14 - блок определения минимальной продолжительности разворота на интервалах непересекающихся зон ориентации, 15 - блок определения интервалов гравитационной разгрузки, 16 - блок определения момента начала разворота, 17 - блок определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента, 18 - блок моделирования режимов гравитационной разгрузки, 19 - блок определения выполнимости структуры сеанса ориентации, 20 - блок подтверждения выполнимости структуры сеанса ориентации по кинетическому моменту, 21 - программно-временное устройство, 22 - блок определения соответствия расчетных начальных значений вектора кинетического момента измеренным значением.
Работает система следующим образом.
Перед проведением эксперимента блок 3 производит прогноз изменений вектора  (t) в соответствии с выражением (1) для режима поддержания ориентации, обеспечивающего проведение указанного эксперимента на интервале (t, χ τв), где χ - коэффициент, определяющий зону прогноза на витке (t1, τв), охватывающую возможные моменты времени начала последующих экспериментов. Увеличение интервала прогноза от (t1, t2) до (t1, χ τв) связано с тем, что моменты времени начала переориентации КА могут не совпадать с моментами времени окончания экспериментов по баллистическим и другим условиям.
(t) в соответствии с выражением (1) для режима поддержания ориентации, обеспечивающего проведение указанного эксперимента на интервале (t, χ τв), где χ - коэффициент, определяющий зону прогноза на витке (t1, τв), охватывающую возможные моменты времени начала последующих экспериментов. Увеличение интервала прогноза от (t1, t2) до (t1, χ τв) связано с тем, что моменты времени начала переориентации КА могут не совпадать с моментами времени окончания экспериментов по баллистическим и другим условиям.
Далее, по аналогии с работой системы-прототипа, проверяется выполнение условия  (t)∈S на интервале (t1, t2) и, если оно выполняется, то принимается решение на проведение эксперимента. По принятии указанного решения в блоки 12-22 с выхода блока 3 выдается команда на приведение системы в исходное положение. Далее с второго и третьего выходов блока 3 в блоки 12 и 13 производится запись спрогнозированных на интервале (t1, Ψ τв) значений
(t)∈S на интервале (t1, t2) и, если оно выполняется, то принимается решение на проведение эксперимента. По принятии указанного решения в блоки 12-22 с выхода блока 3 выдается команда на приведение системы в исходное положение. Далее с второго и третьего выходов блока 3 в блоки 12 и 13 производится запись спрогнозированных на интервале (t1, Ψ τв) значений  (t) и параметров вектора состояния КА соответственно.
(t) и параметров вектора состояния КА соответственно.
В блоке 13 по данным на проведение экспериментов, предварительно заданным на второй вход из блока 2, а также по начальному вектору состояния КА, полученному из блока 3, рассчитываются временные интервалы на проведение последующих экспериментов и значения кинематических параметров, определяющих ориентации КА при этом.
После получения расчетных величин в блоке 23 на проведение эксперимента Э1 и Э2 передаются во внешние блоки следующие данные:
- в блок 14, 21 и 23 - кинематические параметры, определяющие ориентацию КА относительно орбитального и других расчетных базисов; углы атаки α1, скольжения β, поворота солнечных батарей, ϕ СБ;
- блок 15 - кинематические параметры, определяющие переориентацию КА при переходе от Э1 к Э2;
- в блоки 17-22 - значения t2, t3, определяющие моменты времени конца предыдущего и начала последующего экспериментов на интервале орбитального участка.
В блоке 15 производится определение минимально возможной продолжительности разворота Δ tР', исходя из кинематических параметров на переориентацию КА.
Минимально возможная продолжительность разворота будет равна
Δt =
=  , где ω max - установленная для конкретной системы СГ максимально возможная угловая скорость разворота КА без использования ДО в качестве исполнительных органов;
, где ω max - установленная для конкретной системы СГ максимально возможная угловая скорость разворота КА без использования ДО в качестве исполнительных органов;
β к - угол конечного поворота.
После определения значение Δ tР' передается в блоки 17 и 18.
В блоке 16 производится проверка выполнения условия
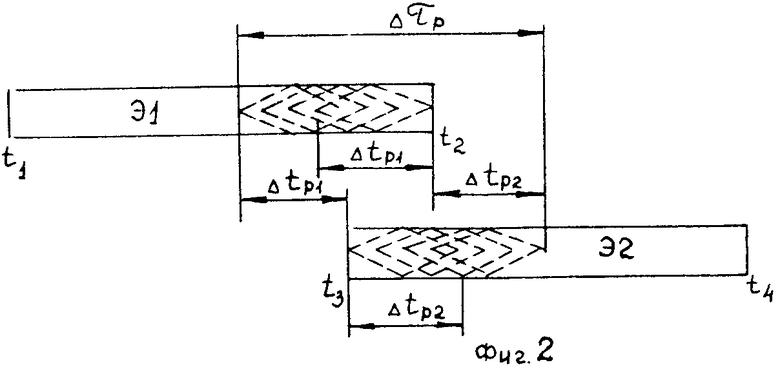
t3 - t2 ≅0 (2) и, если условие выполняется, то выдается команда в блок 17 на поиск минимальной длительности разворота КА на интервалах пересекающихся зон экспериментов, где и осуществляется поиск момента начала разворота tР, при котором он будет минимальным по длительности и, следовательно, сама продолжительность экспериментов будет максимальной.
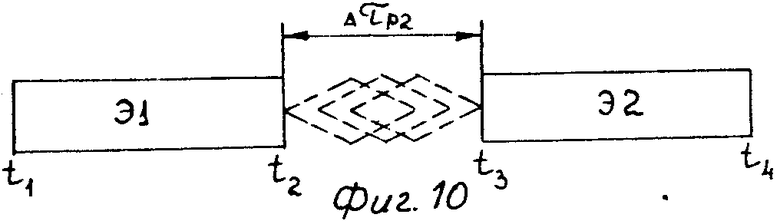
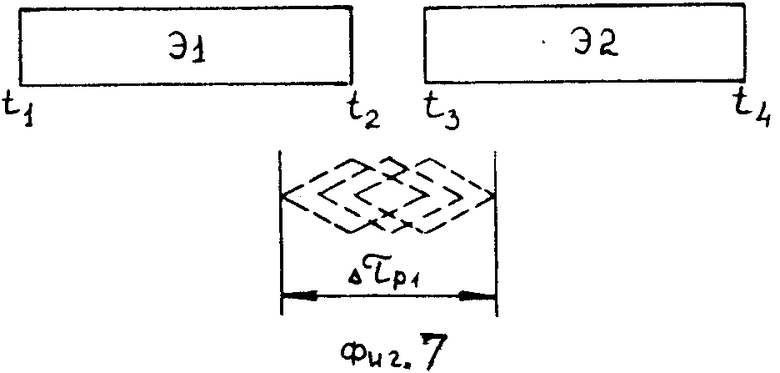
На фиг. 2 показан случай пересекающихся зон экспериментов, обозначением ΔτР показан условно интервал возможной вставки программного разворота КА для переориентации; обозначения Δ tР1, Δ tР2характеризуют возможные длительности разворотов на участках "левой" и "правой" частей интервала Δ tР; остальные обозначения соответствуют ранее принятым.
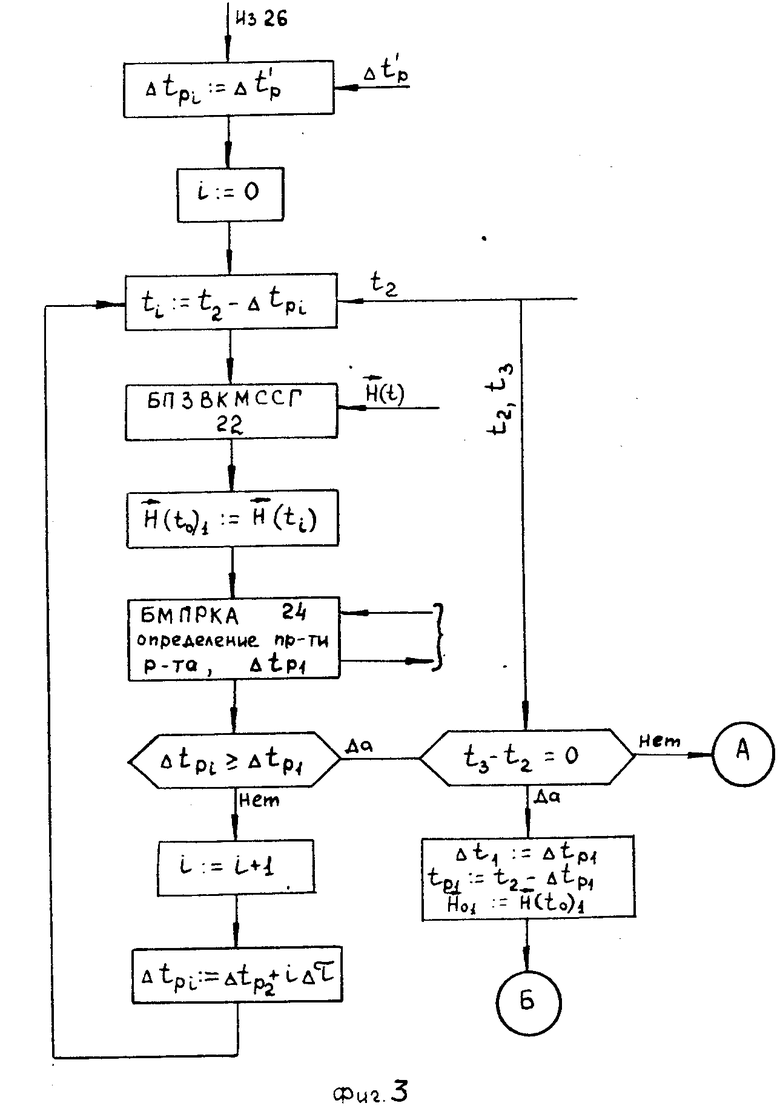
На фиг. 3 представлена модель алгоритма решения задачи поиска продолжительности разворота на "левом" интервале при условии окончания разворота к моменту времени t2. Поиск осуществляется итерационным методом. Исходной величиной для начала поиска является минимально возможная продолжительность Δ tР', получаемая из блока 15. Переменной является момент времени ti, по которому в блоке 7 осуществляется поиск начальных условий по  (t) для моделирования режима программного разворота в блоке 9. Угловое движение КА моделируется с учетом всех особенностей бортовых алгоритмов управления режимами ориентации. При этом для определения составляющих главного вектора возмущающего момента ((
(t) для моделирования режима программного разворота в блоке 9. Угловое движение КА моделируется с учетом всех особенностей бортовых алгоритмов управления режимами ориентации. При этом для определения составляющих главного вектора возмущающего момента (( )), действующего на корпус КА в процессе разворота, блок 9 обменивается информацией с блоком 8. В качестве запросной является информация об изменениях в кинематическом контуре СУД кватерниона Λ , по которой в блоке 8 определяют положение КА относительно орбитального базиса. А по положению КА в орбитальном базисе определяют вектор
)), действующего на корпус КА в процессе разворота, блок 9 обменивается информацией с блоком 8. В качестве запросной является информация об изменениях в кинематическом контуре СУД кватерниона Λ , по которой в блоке 8 определяют положение КА относительно орбитального базиса. А по положению КА в орбитальном базисе определяют вектор  направляющих косинусов между связанными осями КА и его радиус-вектором R0, а также углы α1 и β (атаки и скольжения).
направляющих косинусов между связанными осями КА и его радиус-вектором R0, а также углы α1 и β (атаки и скольжения).
Таким образом, по расчетным изменениям кватерниона Λ в блоке 9, переданным в блок 8 с установленным расчетным шагом, в блоке 9 определяются и передаются обратно необходимые расчетные значения для определения гравитационной и аэродинамической составляющих главного вектора  . В расчетные входят также и передаваемые на каждом шаге значения вектора состояния, необходимые для определения радиус-вектора и скорости полета КА.
. В расчетные входят также и передаваемые на каждом шаге значения вектора состояния, необходимые для определения радиус-вектора и скорости полета КА.
После определения продолжительности разворота Δ tР1сравнивается это значение со значением Δ tРi на предыдущих итерационном шаге. И если tPi меньше значения ΔtP1, то производится поиск очередного значения продолжительности с шагом итераций Δτ . Если же нет, то проверяется условие смежности режимов ориентации (t3 - t2) = 0, обеспечивающих проведение экспериментов Э1 и Э2. Если условие выполняется, то на участке "левой" части интервала Δτ Р поиск разворота с минимальной продолжительностью прекращается. Продолжительность разворота Δ t1 принимается равной последней расчетной ΔtP1, момент начала разворота ΔtР1 отстоит влево от момента времени t2 на величину ΔtР1 и начальное условие по  (t) принимается равным на момент времени начала последнего расчетного значения разворота.
(t) принимается равным на момент времени начала последнего расчетного значения разворота.
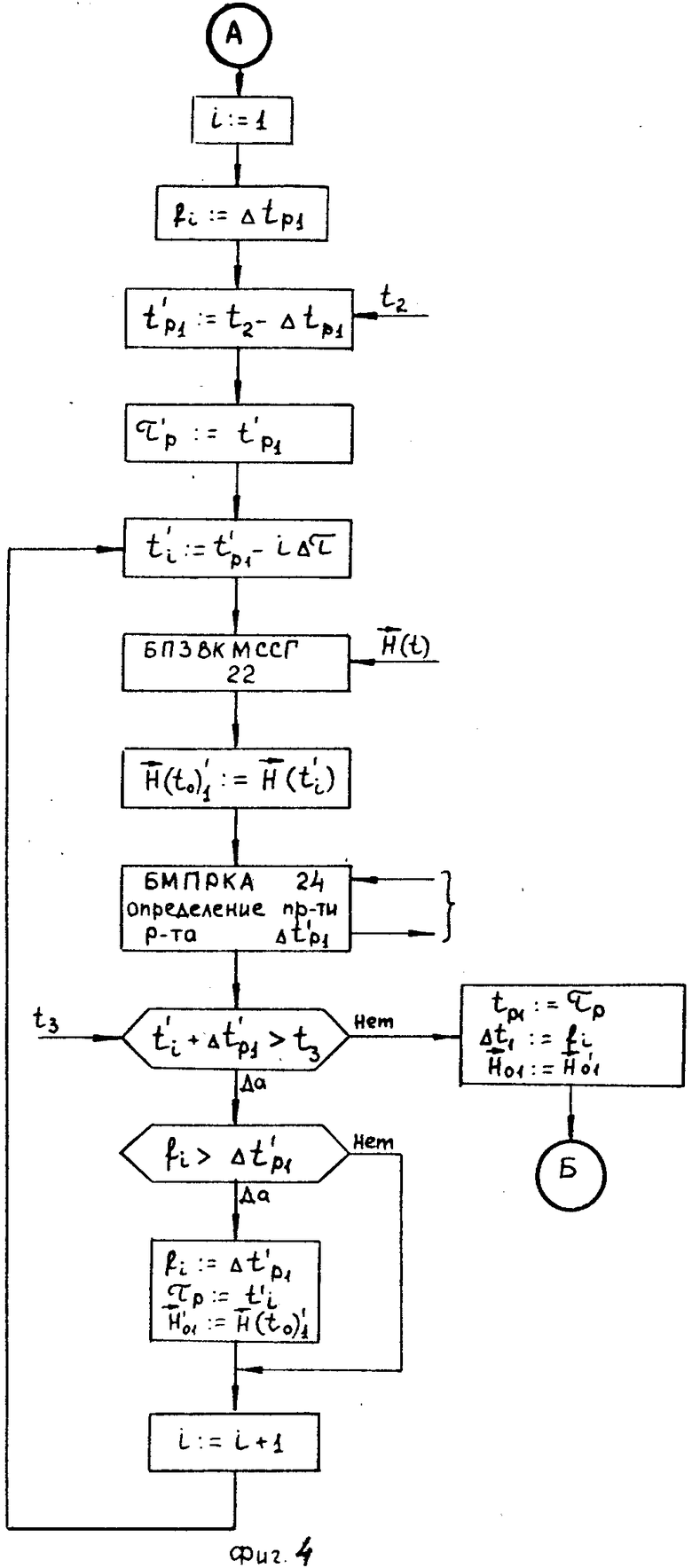
В случае невыполнения условия смежности указанных режимов ориентации производится поиск минимальной продолжительности разворота на участке "левой" части интервала Δτ Р (см. фиг. 4).
Для этого на первом итерационном шаге поиска (i: = 1), в качестве граничного (fi) берется значение продолжительности Δ tР1. Момент времени начала разворота ΔtP1' на этом же шаге принимает не окончательное, а промежуточное значение τ Р. Затем в алгоритме начало разворота сдвигается по времени "влево" на Δτ . Для выбранного момента времени ti' находится в блоке 7 начальное значение  (to)
(to) по вектору
по вектору  (t) и в блоке 9 определяется продолжительность разворота Δ tP1'. Далее производится проверка на принадлежность продолжительности разворота интервалу (ti', t3) (до "правой" границы, определяемой моментов времени t3). Если указанная граница не пересекается, то производится выбор меньшего из расчетных значений продолжительности разворота, запоминаются момент времени τ Р и начальные условия H
(t) и в блоке 9 определяется продолжительность разворота Δ tP1'. Далее производится проверка на принадлежность продолжительности разворота интервалу (ti', t3) (до "правой" границы, определяемой моментов времени t3). Если указанная граница не пересекается, то производится выбор меньшего из расчетных значений продолжительности разворота, запоминаются момент времени τ Р и начальные условия H (t) по
(t) по  (t), ему соответствующие. Далее производится переход к следующему (i + 1)-му шагу.
(t), ему соответствующие. Далее производится переход к следующему (i + 1)-му шагу.
В случае пересечения границы в качестве момента начала минимального по длительности разворота принимается последнее запомненное значение τ Р, продолжительность разворота Δ t1 принимается равной последнему запомненному граничному значению fi, а начальные условия  соответствуют моменту времени τР.
соответствуют моменту времени τР.
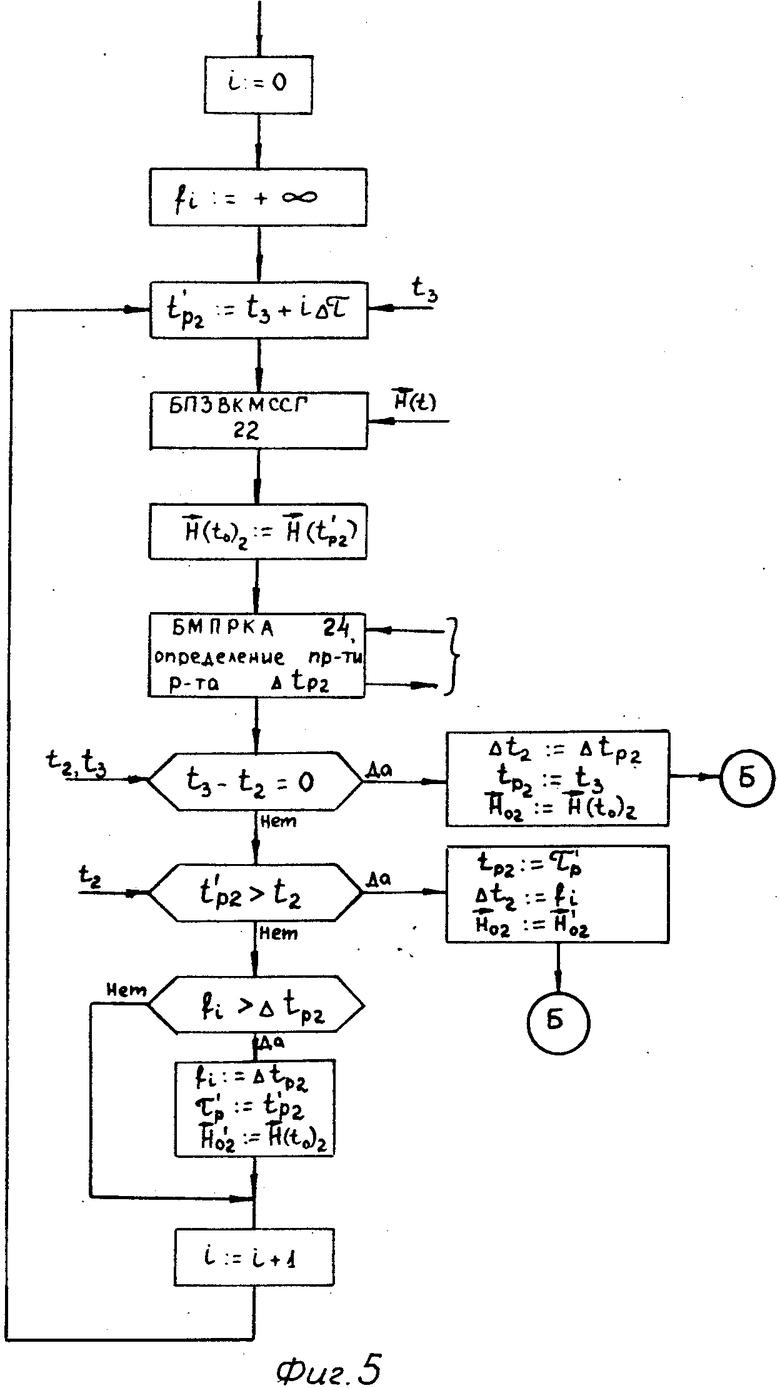
Определив минимальную продолжительность разворота Δ t1 в "левой" части интервала Δτ Р, переходим к определению минимальной продолжительности разворота Δ t2 в "правой" части указанного интервала. Оба указанных алгоритма по определению Δ t1 и Δ t2 являются независимыми друг от друга, поэтому для сокращения времени на принятие решения процесс поиска можно проводить параллельно (см. фиг. 3, 5).
В начале поиска в качестве верхней границы продолжительности разворота берем fi: = + ∞ . Далее, начиная с момента времени t3 с шагом Δ τ , проводится итерационный процесс поиска минимальной продолжительности разворота. При этом проверяется условие смежности двух режимов ориентации (t3 - t2 = 0) и, если оно выполняется, процесс итераций не производится, первое расчетное значение продолжительности разворота принимается равным Δ t2, момент времени начала разворота tР2соответствует t3 и начальные условия по  (t) выбираются на этот же момент времени t3.
(t) выбираются на этот же момент времени t3.
В процессе поиска Δ t3 на каждом шаге производится сравнение текущего и предыдущего значений продолжительности, а запоминается меньшее из них. Меньшему из значений задаются также и момент времени начала разворота для его получения и начальное условие по  (t), ему соответствующее.
(t), ему соответствующее.
Процесс итераций производится до выхода на "левую" границу, определяемую моментом времени t2. При выходе на указанную границу последнее из запомненных значений Δ t2 принимается за искомое.
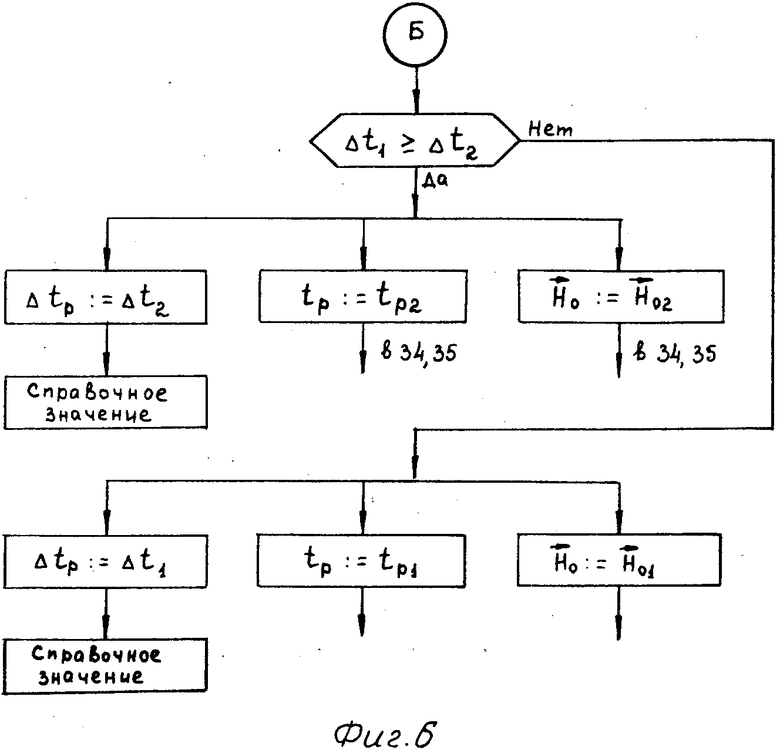
Далее по значениям Δ t1 и Δ t2 производится поиск наименьшего из значений продолжительности разворота (см. фиг. 6). Моменты времени его начала и значение вектора  , ему соответствующее, передаются в блоки 19 и 20.
, ему соответствующее, передаются в блоки 19 и 20.
В случае невыполнения условия (2) в блоке 11 управляющий сигнал выдается в блок 13, где производится проверка выполнения другого условия:
(t3 - t2) < Δ tP', (3) где Δ tP' - минимально возможная продолжительность разворота КА при переходе от ориентации эксперимента Э1 в ориентацию эксперимента Э2, определяемая в блоке 10.
Значения t2, t3 определяются в блоке 8 и передаются в блок 13.
В случае выполнения условия (3) управляющий сигнал выдается в блок 14, где осуществляется поиск момента начала разворота на интервале Δτ Р1 (см. фиг. 7). В отличие от случая, указанного на фиг. 2, разворот должен включать в себя интервал (t2, t3). Следовательно, начинаться он должен не позже момента времени t2 и заканчиваться не раньше момента времени t3. Указанные случаи и определяют интервал времени Δτ Р1возможной вставки разворота, а минимальное значение продолжительности разворота приводит к максимальной продолжительности ориентации, обеспечивающих проведение экспериментов.
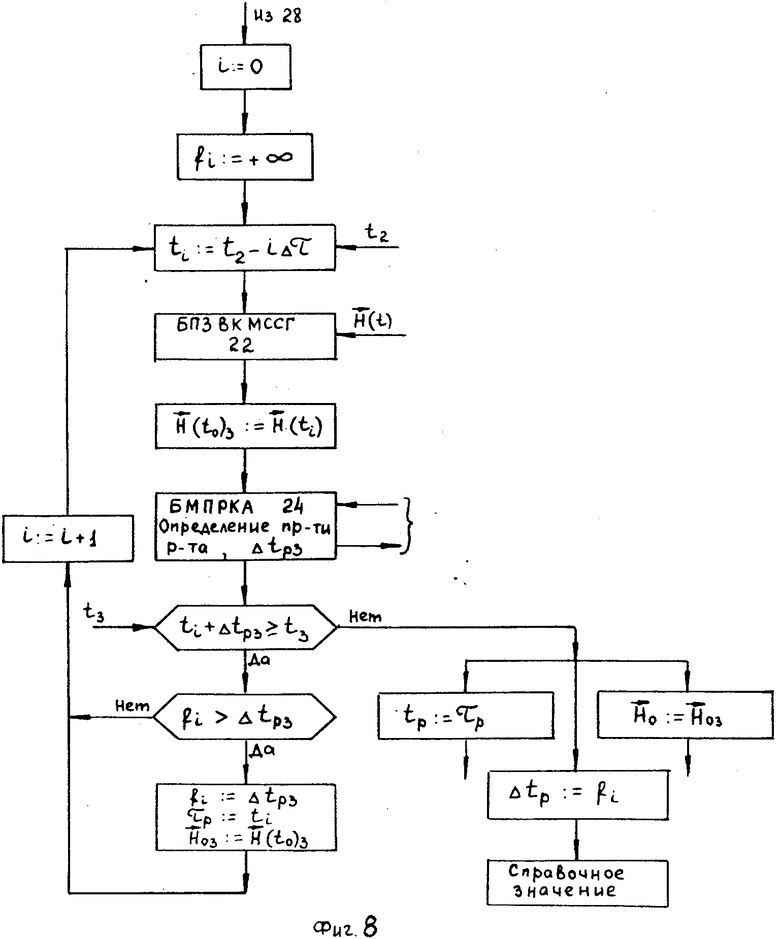
Блок-схема алгоритма поиска минимальной продолжительности разворота в блоке 14 на интервале Δτ Р1 показана на фиг. 8.
Поиск минимальной продолжительности разворота производится итерационным методом. Переменной величиной является момент времени начала разворота, который изменяется с шагом Δτ , начиная с момента времени t2. Работа алгоритма на фиг. 8 аналогична описанию работы алгоритмов, представленных на фиг. 4-6, при этом учитываются новые границы интервала Δτ Р1 (вместо Δτ Р). На выходе блока 14 получаем значения момента начала разворота tР и начальные условия  по
по  (t) ему соответствующие, которые передаются затем в блок 19 и 20.
(t) ему соответствующие, которые передаются затем в блок 19 и 20.
В случае невыполнения условия (2) сигнал о начале поиска из блока 13 передается в блок 15.
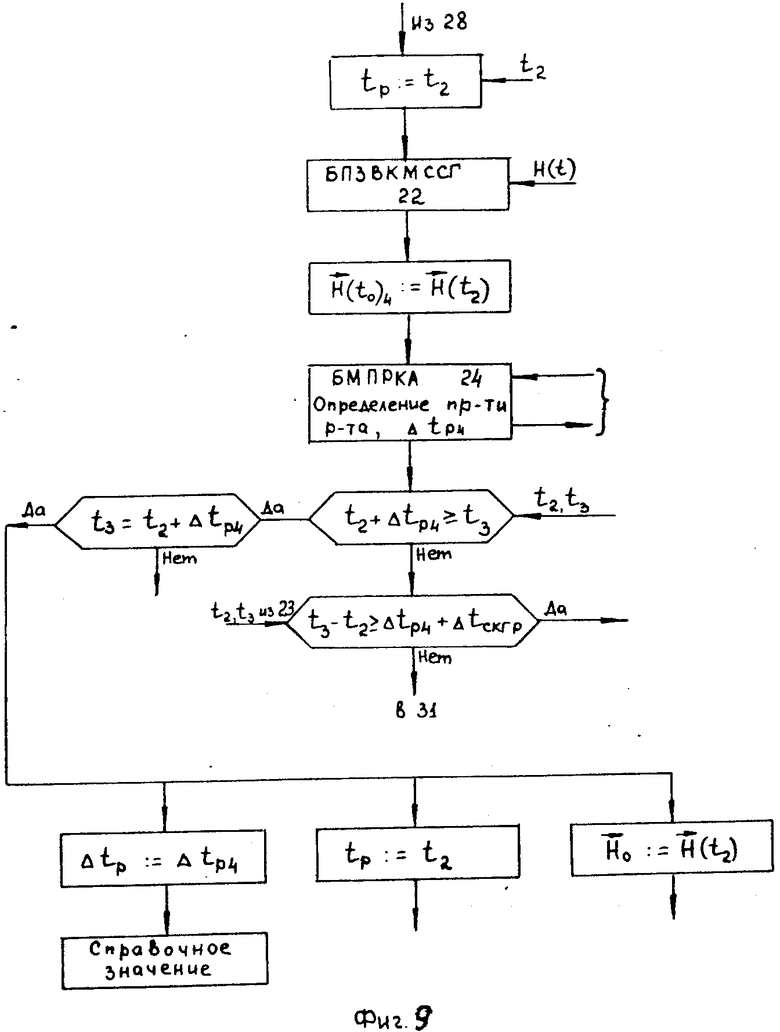
В блоке 15 проверяется возможность проведения разворота, начиная с момента времени t2 и заканчивая его моментом времени t3 (см. алгоритм на фиг. 9). Если указанный разворот по длительности ( Δ tP4) строго укладывается в данный промежуток (t3 = t2 + + Δ tP4), то за начальный момент разворота в структуре cеанса ориентации принимается момент времени t2 и начальные условия  по
по  (t) выбираются на этот же момент времени. Полученные значения передаются соответственно в блок 19 и блок 20.
(t) выбираются на этот же момент времени. Полученные значения передаются соответственно в блок 19 и блок 20.
В случае, когда указанный разворот заканчивается позже момента времени t3, то производится обращение в блок 14 и поиск значений tP и  производится в соответствии с алгоритмом, представленным на фиг. 8.
производится в соответствии с алгоритмом, представленным на фиг. 8.
Если же указанный разворот заканчивается раньше момента времени t3, то проверяется возможность включения в структуру сеанса ориентации интервала гравитационной разгрузки. Для этого проверяется выполнение условия
t3 - t2 ≥ Δ tP4 + Δ tСКГР, (4) где Δ tСКГР - интервал эффективного применения режимов гравитационной разгрузки силовых гироскопов от накопленного кинетического момента. Под интервалом эффективного применения режимов гравитационной разгрузки понимается полученная по результатам математического моделирования и на его основе статистически минимальная продолжительность режимов СКГР, при которой модуль вектора  (t) после разгрузки всегда меньше по величине модуля указанного вектора до начала разгрузки.
(t) после разгрузки всегда меньше по величине модуля указанного вектора до начала разгрузки.
Если условие (3) не выполняется, то поиск момента времени tР и начального значения  производится в блоке 16, иначе происходит переход в блоки 17 и 18.
производится в блоке 16, иначе происходит переход в блоки 17 и 18.
Для поиска указанных значений в блоке 16 определен интервал времени Δτ P2 (см. фиг. 10). Продолжительность разворота принадлежит указанному временному интервалу с определенным временным запасом. Следовательно, она не влияет на продолжительность самих экспериментов и искать ее наименьшее значение не имеет смысла.
Однако построение структуры сеанса ориентации не безразлично с точки зрения продолжительности ориентации, обеспечивающей проведение эксперимента Э2. Каждый момент времени начала разворота и дальнейшее поддержание заданной ориентации до входа в зону эксперимента обеспечивают свои начальные условия по  (t) на момент времени t3. Наиболее выгодные, с точки зрения последующего эксперимента, те начальные условия по
(t) на момент времени t3. Наиболее выгодные, с точки зрения последующего эксперимента, те начальные условия по  (t), которые приводят номограмму годографа (кривую, описываемую концом вектора
(t), которые приводят номограмму годографа (кривую, описываемую концом вектора  (t)) к центру области S, тогда запас по кинетическому моменту (расстояние от центра до поверхности области) максимален. Если область S симметрична относительно осей связанного базиса, то приведение к центру означает уменьшение модуля вектора
(t)) к центру области S, тогда запас по кинетическому моменту (расстояние от центра до поверхности области) максимален. Если область S симметрична относительно осей связанного базиса, то приведение к центру означает уменьшение модуля вектора  (t), который в предельном значении должен равняться нулю.
(t), который в предельном значении должен равняться нулю.
Следовательно, циклограмму сеанса ориентации на фиг. 10 необходимо строить таким образом, чтобы модуль H вектора  (t) на момент времени t3 был минимален.
(t) на момент времени t3 был минимален.
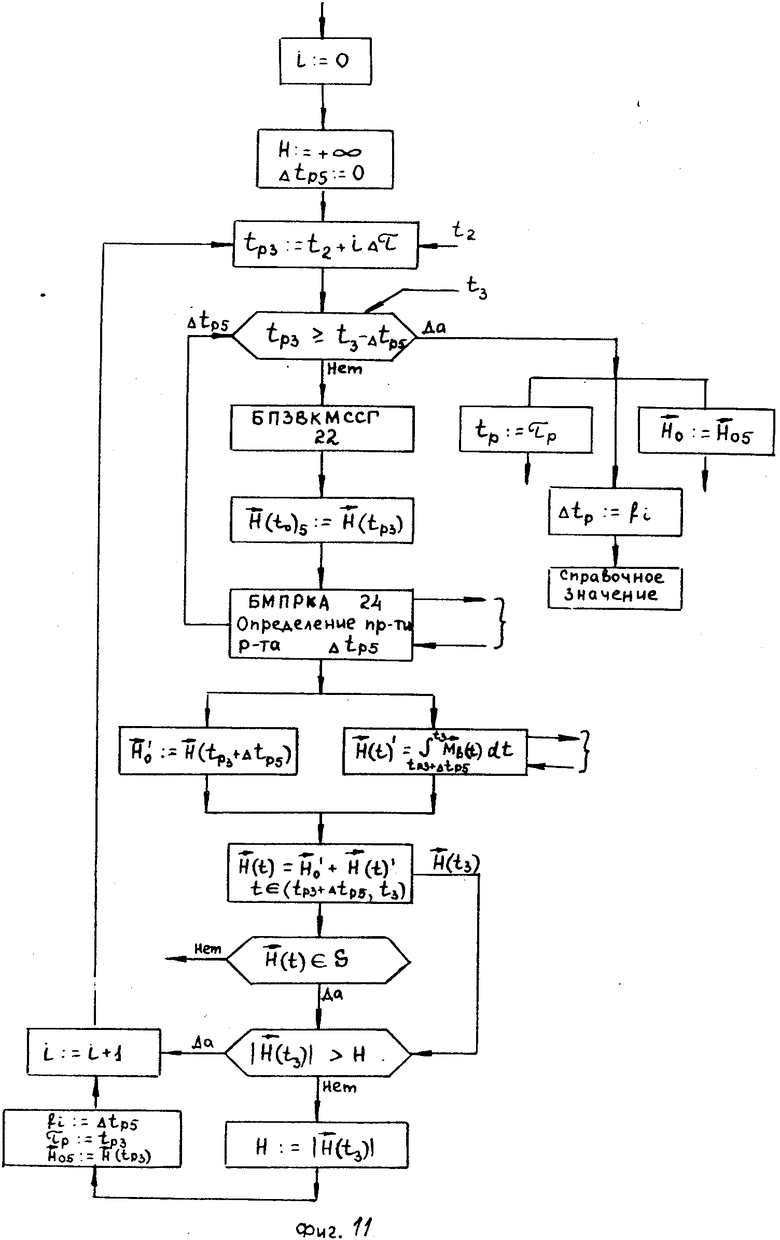
Блок-схема алгоритма поиска момента начала разворота tP, обеспечивающего в циклограмме сеанса ориентации минимальное значение вектора  (t) на момент времени t3, представлена на фиг. 11.
(t) на момент времени t3, представлена на фиг. 11.
В начале алгоритма принимаем H: = + ∞ , а предполагаемую продолжительность разворота Δ tP5 равной нулю. Далее, с шагом Δτ организуется итерационный процесс поиска искомого значения Н. После определения продолжительности разворота на каждом шаге поиска фиксируются значения  вектора
вектора  (t) на момент времени конца разворота (tP3 + Δ tP5) и производится прогноз изменений
(t) на момент времени конца разворота (tP3 + Δ tP5) и производится прогноз изменений  (t)′ на интервале (tP3 + +Δ tP5, t3) по выражению (1) с нулевыми начальными условиями. Для расчета составляющих главного вектора возмущающего момента
(t)′ на интервале (tP3 + +Δ tP5, t3) по выражению (1) с нулевыми начальными условиями. Для расчета составляющих главного вектора возмущающего момента  (t) используется информация с блока 8. Значение вектора
(t) используется информация с блока 8. Значение вектора  t) принято равным нулю. Начальное условие по кинетическому моменту корпуса КА также принимается нулевым, так как рассматривается переориентация КА от одного инерциального базиса к другому.
t) принято равным нулю. Начальное условие по кинетическому моменту корпуса КА также принимается нулевым, так как рассматривается переориентация КА от одного инерциального базиса к другому.
Далее определяются суммарные значения  (t) с учетом начальных условий
(t) с учетом начальных условий  и проверка условия выполнимости режимов
и проверка условия выполнимости режимов  (t)∈S по "насыщению" системы СГ
(t)∈S по "насыщению" системы СГ
Если режимы не выполнимы по причине "насыщения" системы, то выдается команда в блок 20. Иначе производится сравнение модуля Н вектора  (t) на момент времени t3 с этим же значением, полученным на предыдущем шаге, и по результатам сравнения выбирается меньшее из значений H. Для выбранного значения Н запоминаются ему соответствующие момент начала разворота τР, начальные условия
(t) на момент времени t3 с этим же значением, полученным на предыдущем шаге, и по результатам сравнения выбирается меньшее из значений H. Для выбранного значения Н запоминаются ему соответствующие момент начала разворота τР, начальные условия  на момент начала разворота и продолжительность разворота fi.
на момент начала разворота и продолжительность разворота fi.
Итерационный процесс продолжается до момента времени, когда разворот, с точностью до шага Δτ , достигает момента времени t3. По завершении итерационного процесса последние из запомненных значений τ Ри  передаются соответственно в блок 19, блок 20.
передаются соответственно в блок 19, блок 20.
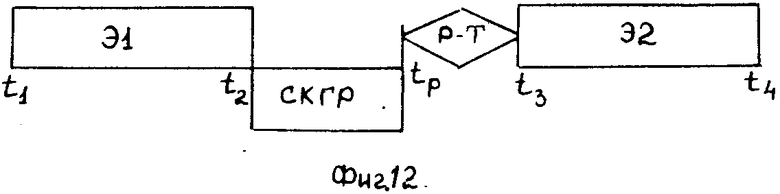
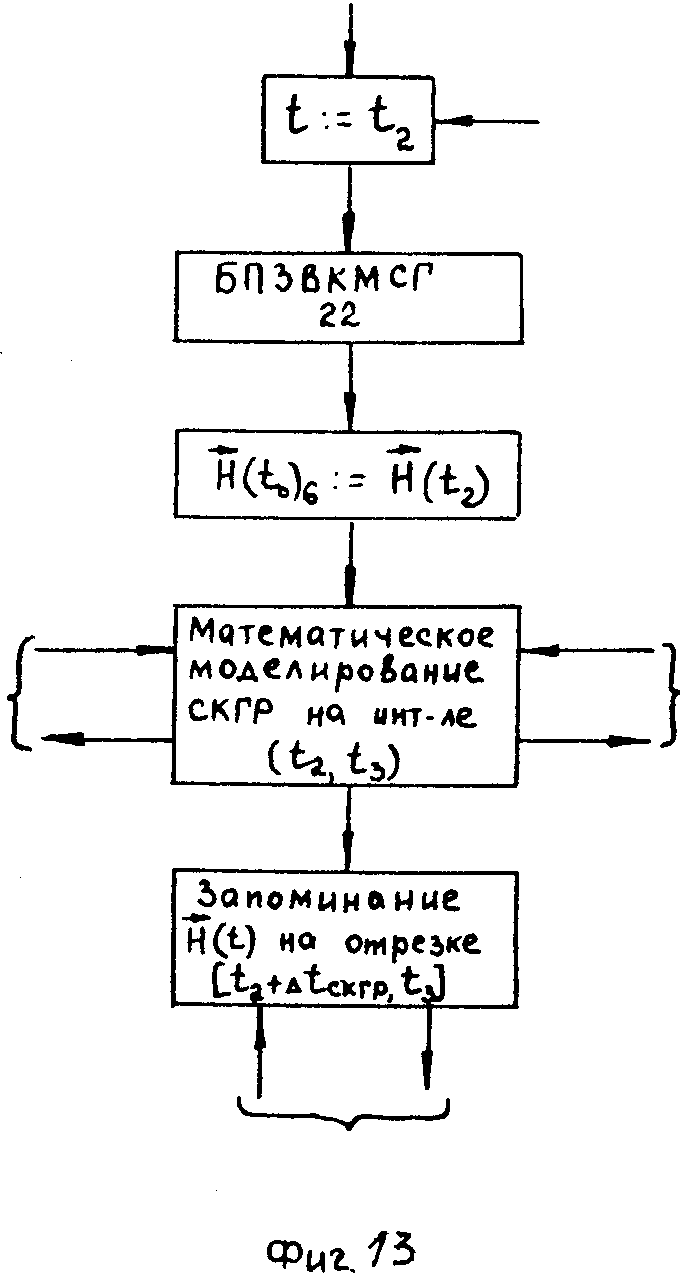
В случае выполнения условия (4) с помощью блока 17 и блока 18 производится построение структуры сеанса ориентации, показанной на фиг. 12. Принятые на фиг. 12 обозначения соответствуют ранее введенным. Для построения указанной структуры определяется момент времени tP прерывания режимов СКГР и перехода в режим программного разворота. Момент времени tР может в принципе совпадать с моментом времени t3. Это возможно в том случае, если ориентация КА на момент окончания режимов СКГР совпадает с ориентацией, обеспечивающей проведение эксперимента Э2. С другой стороны, момент времени tP должен быть больше или равен моменту времени t2 + Δ tСКГР, ибо только в этих случаях, как отмечалось ранее, целесообразно применение режимов СКГР.
По приходе команды из блока 15 в блок 17 (см. фиг. 13) текущему моменту времени t присваивается значение t2 и по нему в блоке 7 отыскивается начальное значение вектора кинетического момента в системе СГ  (t0)6, которое передается непосредственно в блок математического моделирования режимов СКГР на интервале (t2, t3).
(t0)6, которое передается непосредственно в блок математического моделирования режимов СКГР на интервале (t2, t3).
Для примера рассмотрим математическое моделирование режимов СКГР космического модуля. Модуль имеет форму "гантельного", осесимметричного КА. Начальное значение H(t0)6 воспринимается как накопленный кинетический момент в системе СГ ( ).
).
По известным расчетным зависимостям для осесимметричного КА определяем углы Крылова VР и Ψ Р ( ϕ Р полагаем равным нулю) для перехода от орбитального базиса Eор к некоторому инерциальному базису BR гравитационной разгрузки, при котором вектор гравитационного момента  направлен противоположно вектору
направлен противоположно вектору  . Полученным углам соответствует кватернион
. Полученным углам соответствует кватернион )sin(Ψp/2), sin(vp/2)× задающий положение базиса BR относительно базиса Eор.
)sin(Ψp/2), sin(vp/2)× задающий положение базиса BR относительно базиса Eор.
Далее определяем кватернион Х, задающий положение базиса BR относительно базиса lγ :
X = L ˙ D, где L - кватернион, задающий положение базиса Eор относительно базиса lγ . И, наконец, рассчитываем кватернион NR, определяющий рассогласование между базисом BR и базисом B:
NR=  A, где
A, где  - кватернион, сопряженный кватерниону Х;
- кватернион, сопряженный кватерниону Х;
A - кватернион, определяющий положение базиса B относительно lγв момент времени определения базисa BR.
Затем по кватерниону NR моделируется поворот базиса в положениe базиса BR с последующим поддержанием заданной ориентации в ИСК.
При этом блок математического моделирования режимов гравитационной разгрузки взаимодействует следующим образом с внешними блоками. После определения в нем кватерниона D запрашивается в блок 8 значение кватерниона L, а после определения кватерниона Х - значение кватерниона A.
По кватерниону NR, переданному в блок 9, производится моделирование программного разворота. А по концу моделирования программного разворота в модель гравитационной разгрузки выдаются значения времени конца разворота и вектора кинетического момента на этот же момент времени. Указанные значения служат начальными для моделирования следующего режима - поддержания ориентации в базисе BR. При этом по известному положению базиса BR относительно Eор, получаемому из блока 8, определяются параметры для расчета  .
.
Математическое моделирование режимов СКГР производится на интервале (t2, t3), а запоминание значений  (t) - на отрезке t2 + Δ tСКГР, t3, так как момент времени tP может принадлежать только этому отрезку.
(t) - на отрезке t2 + Δ tСКГР, t3, так как момент времени tP может принадлежать только этому отрезку.
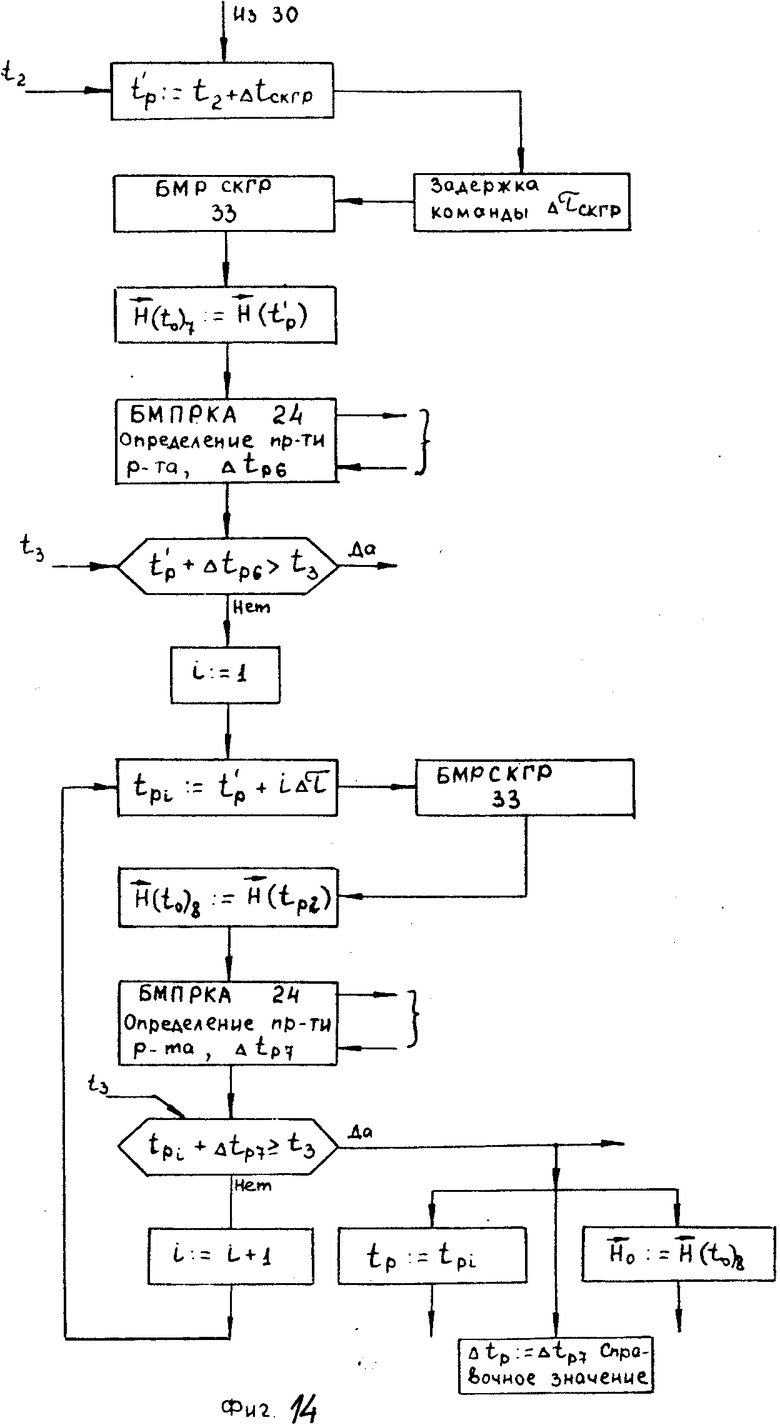
Одновременно с командой в блок 18 из блока 15 приходит та же команда в блок 17 для поиска момента времени начала разворота tP (см. фиг. 13). Первоначально для проверки выбирается момент времени tP, устанавливающий целесообразность проведения режимов гравитационной разгрузки, исходя из минимально необходимой продолжительности ( Δ tСКГР). Ведь кроме изменения начальных условий по  (t) по концу режимов гравитационной разгрузки меняется и угол конечного разворота для последующей переориентации, так как вместо переориентации КА из инерциального базиса, обеспечивающего проведение Э1, в инерциальный базис, обеспечивающий проведение Э2, получаем другой случай разворота - из базиса BR в инерциальный базис для Э2. Обращение в блок 18 производится с задержкой времени Δτ СКГР, необходимой для моделирования режимов СКГР в блоке 18.
(t) по концу режимов гравитационной разгрузки меняется и угол конечного разворота для последующей переориентации, так как вместо переориентации КА из инерциального базиса, обеспечивающего проведение Э1, в инерциальный базис, обеспечивающий проведение Э2, получаем другой случай разворота - из базиса BR в инерциальный базис для Э2. Обращение в блок 18 производится с задержкой времени Δτ СКГР, необходимой для моделирования режимов СКГР в блоке 18.
По моменту времени tP' в блоке 33 производится поиск запомненного значения  (t) для начального условия
(t) для начального условия  (t0)7, которое переписывается затем в блок 9. Блок 8 по запросу с блока 9 выдает новое значение кватерниона М
(t0)7, которое переписывается затем в блок 9. Блок 8 по запросу с блока 9 выдает новое значение кватерниона М
M=  X для программного разворота КА.
X для программного разворота КА.
После определения продолжительности разворота Δ tP6проверяется выполнение условия
tP' + Δ tP6 > t3.
Если это условие выполняется, то переходим в блок 16 для построения сеанса ориентации по алгоритму на фиг. 11, что соответствует структурному построению на фиг. 10. Иначе, с шагом Δτ итерационным методом производится поиск момента начала разворота tP на отрезке [t2 + Δ tСКГР, t3] , который заканчивался бы (с точностью шага итераций) в момент времени t3.
Полученные значения tP и  , ему соответствующие, передаются в блоки 19 и 20. После получения значения tP выдается также в блок 3 сигнал-сообщение о начале режимов СКГР сразу же после момента времени t2(по окончании эксперимента Э1, см. фиг. 12). Если подобного сообщения в блок 3 не приходит, то по концу момента времени t2 будет осуществляться поддержка текущей ориентации на интервале (t1, Ψτ в) до прихода команды на разворот. Если команда не приходит, то по концу указанного интервала устанавливаются режимы СКГР.
, ему соответствующие, передаются в блоки 19 и 20. После получения значения tP выдается также в блок 3 сигнал-сообщение о начале режимов СКГР сразу же после момента времени t2(по окончании эксперимента Э1, см. фиг. 12). Если подобного сообщения в блок 3 не приходит, то по концу момента времени t2 будет осуществляться поддержка текущей ориентации на интервале (t1, Ψτ в) до прихода команды на разворот. Если команда не приходит, то по концу указанного интервала устанавливаются режимы СКГР.
В блок 19 по начальным условиям Ho, заданным на момент времени tP, производится проверка выполнимости структуры сеанса ориентации, программный разворот + поддержание ориентации для проведения эксперимента Э2 по выполнению условия  (t)∈S. При этом в процессe моделирования программного разворота блок 19 обменивается информацией с блоком 9 (задaет кватернион разворота, получает расчетную продолжительность разворота и момент его окончания), а в процессе моделирования поддержания ориентации с блока 8 получает по запросам исходные данные для интегрирования
(t)∈S. При этом в процессe моделирования программного разворота блок 19 обменивается информацией с блоком 9 (задaет кватернион разворота, получает расчетную продолжительность разворота и момент его окончания), а в процессе моделирования поддержания ориентации с блока 8 получает по запросам исходные данные для интегрирования  (t).
(t).
По окончании расчета производится проверка выполнения условия  (t)∈S. И если условие выполняется, то выдается сигнал-сообщение в блок 20 "Структура интенсивного СО по кинетическому моменту выполнима", в противном случае такой сигнал не выдается.
(t)∈S. И если условие выполняется, то выдается сигнал-сообщение в блок 20 "Структура интенсивного СО по кинетическому моменту выполнима", в противном случае такой сигнал не выдается.
В блок 20 записываются отдельно значения tP,  и далее они переписываются соответственно в блок 21 и блок 3 при условии наличия сигнала-сообщения из блока 19 "Структура интенсивного СО по кин. моменту выполнима" и отсутствии сигнала с блока 16 (см. фиг. 11). На выходе блока 20 tP и
и далее они переписываются соответственно в блок 21 и блок 3 при условии наличия сигнала-сообщения из блока 19 "Структура интенсивного СО по кин. моменту выполнима" и отсутствии сигнала с блока 16 (см. фиг. 11). На выходе блока 20 tP и  соответственно обозначаются tP и
соответственно обозначаются tP и  .
.
Блок 21 производит сравнение текущего бортового времени КА со значением tP и при их совпадении выдает команду начала программного разворота в блок 22. В блоке 22 сравнивается измеренное значение  и, полученное по данным из блока 5, с расчетным значением
и, полученное по данным из блока 5, с расчетным значением  . И если выполняется условие
. И если выполняется условие
ΔHo ≅  -
-  и
и , где Δ Ho - величина, характеризующая допустимое расхождение в начальных измеренном и расчетном условиях, то сигнал о начале второго эксперимента выдается в блок 3, иначе блок 3 будет реализовывать режимы гравитационной разгрузки до начала эксперимента Э1 на следующем витке (в соответствии с алгоритмом работы системы-прототипа).
, где Δ Ho - величина, характеризующая допустимое расхождение в начальных измеренном и расчетном условиях, то сигнал о начале второго эксперимента выдается в блок 3, иначе блок 3 будет реализовывать режимы гравитационной разгрузки до начала эксперимента Э1 на следующем витке (в соответствии с алгоритмом работы системы-прототипа).
Если в блоке 20 значения tP,  не записываются (при наличии сигнала запрета с блока 16, см. фиг. 11), то команды на начало второго эксперимента не последует, так как по началу предыдущего эксперимента командные блоки памяти в блок 20 обнуляются по сигналу с блока 3. По указанному сигналу приводятся в исходное состояние блоки 7-22 рассматриваемой системы.
не записываются (при наличии сигнала запрета с блока 16, см. фиг. 11), то команды на начало второго эксперимента не последует, так как по началу предыдущего эксперимента командные блоки памяти в блок 20 обнуляются по сигналу с блока 3. По указанному сигналу приводятся в исходное состояние блоки 7-22 рассматриваемой системы.
Система позволяет обеспечить на фиксированных интервалах полетного времени максимальную продолжительность режимов ориентации, направленных на выполнение номинальной программы полета.
Указанный технический результат достигается за счет вариации значений вектора кинетического момента  (t), накапливаемого в системе СГ при управлении ориентацией КА на участках зон между динамическими экспериментами и участках зон пересечения указанных экспериментов. Варьирование направлено на подготовку наиболее благоприятных с точки зрения последующих режимов ориентации начальных условий по
(t), накапливаемого в системе СГ при управлении ориентацией КА на участках зон между динамическими экспериментами и участках зон пересечения указанных экспериментов. Варьирование направлено на подготовку наиболее благоприятных с точки зрения последующих режимов ориентации начальных условий по  (t). Оно позволяет на участках пересекающихся зон экспериментов уменьшить время переориентации КА и тем самым увеличить непосредственно длительность проведения экспериментов. А на участках зон между динамическими экспериментами - получить минимально накопленные значения
(t). Оно позволяет на участках пересекающихся зон экспериментов уменьшить время переориентации КА и тем самым увеличить непосредственно длительность проведения экспериментов. А на участках зон между динамическими экспериментами - получить минимально накопленные значения  (t), увеличив тем самым располагаемые значения
(t), увеличив тем самым располагаемые значения  (t) для последующих экспериментов и, следовательно, увеличив продолжительность экспериментов до "насыщения" системы СГ. (56) Preclictive momentum management for the Space Station flattis P. D. I. Guid, Contr. and Dyn, 1986, 9, N 4, p. 454-461.
(t) для последующих экспериментов и, следовательно, увеличив продолжительность экспериментов до "насыщения" системы СГ. (56) Preclictive momentum management for the Space Station flattis P. D. I. Guid, Contr. and Dyn, 1986, 9, N 4, p. 454-461.
Предсказуемый кинетический момент гироскопической системы управления орбитальной станцией. М. , ВИНИТИ АH СССР. Астронавтика и ракетодинамика, N 21, 1987, с. 17-23.
Изобретение относится к системам ориентации космических аппаратов (КА), управляемых силовыми гироскопами (СГ). Техническим результатом системы является обеспечение на фиксированных интервалах полетного времени максимальной продолжительности режимов ориентации, направленных на выполнение номинальной программы полета. Указанный технический результат достигается за счет вариации значений вектора кинетического момента  , накапливаемого в системе СГ при управлении ориентацией КА на участках зон между динамическими экспериментами и участках зон пересечения указанных экспериментов. Варьирование направлено на подготовку наиболее благоприятных, с точки зрения последующих режимов ориентации, начальных условий по
, накапливаемого в системе СГ при управлении ориентацией КА на участках зон между динамическими экспериментами и участках зон пересечения указанных экспериментов. Варьирование направлено на подготовку наиболее благоприятных, с точки зрения последующих режимов ориентации, начальных условий по  . Оно позволяет на участках пересекающихся зон экспериментов уменьшить время переориентации КА и тем самым увеличить непосредственно длительность проведения экспериментов. А на участках зон между динамическими экспериментами - получить минимально накопленные значения
. Оно позволяет на участках пересекающихся зон экспериментов уменьшить время переориентации КА и тем самым увеличить непосредственно длительность проведения экспериментов. А на участках зон между динамическими экспериментами - получить минимально накопленные значения  , увеличив тем самым располагаемые значения
, увеличив тем самым располагаемые значения  для последующих экспериментов и, следовательно, увеличив продолжительность экспериментов до "насыщения" системы СГ. 14 ил.
для последующих экспериментов и, следовательно, увеличив продолжительность экспериментов до "насыщения" системы СГ. 14 ил.
СИСТЕМА УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ, содержащая последовательно соединенные блок датчиков внешних данных, блок задания параметров космического аппарата (КА) и внешней среды, блок оценки динамического состояния КА, внешней среды и системы управления и блок силовых гироскопов, второй вход которого соединен с выходом блока задания параметров КА и внешней среды, последовательно соединенные блок датчиков угловой скорости, выход которого соединен с третьим входом блока оценки динамического состояния КА, внешней среды и системы управления, и блок сравнения прогнозируемых и располагаемых значений кинетического момента, выход которого соединен с третьим входом блока силовых гироскопов, первый выход которого соединен с вторым входом блока оценки динамического состояния КА, внешней среды и системы управления, отличающаяся тем, что в нее дополнительно введены последовательно соединенные блок определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации, первый вход которого соединен с первым выходом блока оценки динамического состояния КА, внешней среды и системы управления, блок определения минимально возможной продолжительности разворота, блок определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, блок моделирования программного разворота КА, блок определения интервалов гравитационной разгрузки, блок моделирования режимов гравитационной разгрузки, блок определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента, блок определения момента начала разворота, блок прогнозируемых значений вектора кинетического момента системы силовых гироскопов, блок определения минимальной продолжительности разворота на интервале непересекающихся зон ориентации, блок определения выполнимости структуры сеанса ориентации по кинетическому моменту, блок подтверждения выполнимости структуры сеанса ориентации, программно-временное устройство, блок определения соответствия расчетных начальных значений вектора кинетического момента измеренным значениям, выход которого соединен с четвертым входом блока оценки динамического состояния КА, внешней среды и системы ориентации, блок определения интервалов пересекающихся зон ориентации, выход которого соединен с вторым входом блока определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, блок определения интервалов непересекающихся зон ориентации, выход которого соединен с вторым входом блока определения минимальной продолжительности разворота на интервалах непересекающихся зон ориентации, причем второй выход блока задания параметров КА и внешней среды соединен с вторым входом блока определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации, выход которого соединен с третьим входом блока определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, третьим входом блока определения минимальной продолжительности разворота на интервалах непересекающихся зон ориентации, первым входом блока определения интервалов пересекающихся зон ориентации, первым входом блока определения интервалов непересекающихся зон ориентации, вторым входом блока определения момента начала разворота, вторым входом блока определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента и вторым входом блока определения интервалов гравитационной разгрузки, первый выход которого соединен с третьим входом блока определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента, первый выход которого соединен с пятым входом блока оценки динамического состояния КА, внешней среды и системы управления, выход которого по команде на приведение системы в исходное положение соединен с соответствующими входами блока прогнозирования значений кинетического момента системы силовых гиростабилизаторов, блока определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации, блока моделирования программного разворота, блока определения минимально возможной продолжительности разворота, блока выделения интервалов пересекающихся зон ориентации, блока определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, блока выделения интервалов непересекающихся зон ориентации, блока определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, блока определения минимальной продолжительности разворота на интервалах непересекающихся зон ориентации, блока определения интервалов гравитационной разгрузки, блока определения момента начала разворота, блока определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента, блока моделирования режимов гравитационной разгрузки, блока определения выполнимости структуры сеанса ориентации по кинетическому моменту, блока подтверждения выполнимости структуры сеанса ориентации по кинетическому моменту, программно-временного устройства и блока определения соответствия расчетных начальных значений вектора кинетического момента измеренным значениям, второй вход блока оценки динамического состояния КА, внешней среды и системы управления соединен с вторым входом блока сравнения прогнозируемых и располагаемых значений кинетического момента и третьим входом блока прогнозируемых значений кинетического момента системы силовых гироскопов, выход которого соединен с четвертым выходом блока определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, третьим входом блока определения момента начала разворота, третьим входом блока определения интервалов гравитационной разгрузки и вторым входом блока моделирования режимов гравитационной разгрузки, выход которого соединен с первым входом блока прогнозируемых значений кинетического момента системы силовых гироскопов, второй вход блока определения соответствия расчетных начальных значений вектора кинетического момента измеренным значениям соединен с информационным выходом блока силовых гироскопов, а его третий вход с вторым выходом блока подтверждения структуры сеанса ориентации по кинетическому моменту, второй вход которого соединен с первым выходом блока определения минимальной продолжительности разворота на интервалах непересекающихся зон ориентации, второй выход которого соединен с вторым входом блока проверки выполнимости структуры сеанса ориентации по кинетическому моменту и третьим входом блока подтверждения структуры сеанса ориентации по кинетическому моменту, выход блока определения минимально возможной продолжительности разворота соединен с вторым входом блока определения интервалов непересекающихся зон ориентации, второй выход которого соединен с четвертым входом блока определения интервалов гравитационной разгрузки, второй выход которого соединен с четвертым входом блока определения момента начала разворота, третий выход которого соединен с четвертым входом блока подтверждения структуры сеанса ориентации по кинетическому моменту, третий выход блока определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации соединен с третьим входом блока проверки выполнимости структуры сеанса ориентации по кинетическому моменту, вторым входом блока моделирования программного разворота, пятым входом блока выбора момента начала разворота и третьим входом блока моделирования режимов гравитационной разгрузки, третий вход блока определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации соединен с вторым входом блока проверки выполнимости структуры сеанса ориентации по кинетическому моменту, выход блока моделирования программного разворота соединен с четвертым входом блока определения выполнимости структуры сеанса ориентации по кинетическому моменту, четвертым входом блока моделирования режимов гравитационной разгрузки, четвертым входом блока опредеделения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента и пятым входом блока определения момента начала разворота, пятым входом блока определения минимальной продолжительности разворота на интервалах непересекающихся зон ориентации и пятым входом блока определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, второй выход блока определения минимальной продолжительности разворота на интервалах пересекающихся зон ориентации, второй выход блока поиска минимальной продолжительности разворота на интервалах непересекающихся зон ориентации, третий выход блока выделения интервалов гравитационной разгрузки соединены с вторым входом блока прогнозирования значений кинетического момента системы силовых гироскопов, четвертый выход блока определения интервалов гравитационной разгрузки соединен с шестым входом блока определения минимальной продолжительности разворота на интервалах непересекающихся зон ориентации, второй выход которого соединен с первым входом блока моделирования программного разворота, который соединен также с вторым выходом блока определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента, с третьим выходом блока определения выполнимости структуры сеанса ориентации по кинетическому моменту и третьим выходом блока моделирования режимов гравитационной разгрузки, пятый вход которого соединен с третьим выходом блока определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента, второй выход блока моделирования программного разворота, четвертый выход блока определения момента начала разворота и четвертый выход блока моделирования режимов гравитационной разгрузки соединены с третьим входом блока определения временных интервалов для проведения экспериментов и определения кинематических параметров для ориентации, третий и четвертый выходы блока определения минимальной продолжительности разворота на интервалах, пересекающихся зон ориентации, пятый и шестой выходы блока определения интервалов гравитационной разгрузки, пятый и шестой выходы блока определения момента начала разворота, четвертый и пятый выходы блока определения целесообразности проведения гравитационной разгрузки между смежными сеансами ориентации по текущему вектору кинетического момента соединены соответственно с первым и вторым входами блока проверки выполнимости структуры сеанса ориентации по кинетическому моменту.
