Предлагаемое техническое решение относится к области космической техники и может быть использовано при зондировании атмосферы Земли с борта космического аппарата (КА). Ряд атмосферных явлений наиболее ярко проявляется при наблюдении из космоса в направлении горизонта Земли. В связи с этим оптические исследования атмосферы у видимого с КА горизонта Земли имеют важное научное и прикладное значение (см. [1], [2], [3]).
Известен способ управления ориентации КА, включающий выполнение пространственного разворота КА до совмещения оси визирования прибора зондирования (ПЗ) с плоскостью орбиты КА с последующей стабилизацией КА в инерциальном пространстве. В данном способе строится и поддерживается одноосная ориентация КА относительно инерциального пространства. Управление ориентацией КА осуществляется с помощью системы управления движением и навигацией (СУДН) КА (см. [4], стр.175), в состав которой входят датчики угловых скоростей и углов, усилительно-преобразующее устройство, исполнительные устройства и органы управления.
В данной ориентации КА, перемещаясь вдоль орбиты, проходит положение, в котором ось визирования ПЗ будет направлена по касательной к орбите КА в сторону против вектора скорости КА. При дальнейшем перемещении КА вдоль орбиты ось визирования ПЗ проходит через атмосферу Земли до точки пересечения оси визирования ПЗ с видимым с КА горизонтом Земли.
Недостаток указанного способа управления ориентацией КА заключается в том, что в его действиях не учитывается особенности системы управления ориентацией КА, что не позволяет эффективно расходовать топливо на построение и поддержание требуемой ориентации КА. Рассмотрим КА, в системе управления движением ориентацией которых наряду с реактивными двигателями ориентации (ДО) используются инерционные исполнительные органы - система силовых гироскопов (гиросистема (ГС)). В этом случае при выполнении разворота и поддержании ориентации КА происходит накопление кинетического момента (КМ) ГС и по достижении КМ заданных граничных значений выполняется операция «разгрузки» ГС - приведения КМ в допустимые пределы с помощью ДО. При этом при выполнении разгрузки ГС требуется дополнительное рабочее тело (топливо) для работы ДО КА.
Известны способы и системы управления ориентацией КА при выполнении программы полета и экспериментов на КА, обеспечивающие благоприятные условия для работы ГС - такие, чтобы максимально уменьшать эффект «насыщения» ГС и тем самым избегать или, по крайней мере, уменьшать необходимость их разгрузки (см. [5]; [6], стр.41; [7], стр.295-298).
Наиболее близким из аналогов, принятым за прототип, является способ управления ориентацией КА, описанный в [10], стр.217-220. В данном способе при построении ориентации КА для выполнения полетных операций осуществляют разворот КА до совмещения оси минимального момента инерции (ММИ) КА с плоскостью орбиты КА и поддержание неизменной ориентации КА в инерциальной системе координат. При такой ориентации оси ММИ КА в пространстве действующий на КА гравитационный момент минимален и, как следствие, эффект «насыщения» ГС незначителен и требуется минимальный расход рабочего тела на разгрузку. Данная ориентация широко использовалась при выполнении полетных операций и экспериментов на орбитальной станции «Мир» и используется на международной космической станции (МКС) (см. [11], [9]).
В данном способе строится и поддерживается трехосная ориентация КА относительно инерциального пространства: выполняется разворот КА, в результате которого ось визирования ПЗ и ось ММИ КА располагаются в плоскости орбиты КА, после чего осуществляется переход в режим инерциальной стабилизации КА. При этом КА, перемещаясь вдоль орбиты, проходит положение, в котором ось визирования ПЗ будет направлена по касательной к орбите КА в сторону против вектора скорости КА. При дальнейшем перемещении КА вдоль орбиты ось визирования ПЗ проходит через атмосферу Земли до точки пересечения с видимым с КА горизонтом Земли. Способ реализуется активной комбинированной системой ориентации и стабилизации КА с двигателями и блоком трехстепенных гироскопов (см. [6], стр.194), включающей измерительное устройство (ИУ), усилительно-преобразующее устройство (УПУ), двигатели-маховики (ДМ), тахометры двигателей-маховиков (ТДМ), переключающее устройство (ПУ), разгрузочное устройство (РУ), КА с установленным на нем прибором для выполнения эксперимента.
Отметим, что для исследования атмосферы Земли необходимо зондировать атмосферу над множеством различных точек земной поверхности. В связи с этим недостатком способа-пототипа является то, что для проведения нескольких зон зондирования атмосферы требуется такое же количество раз выполнять построение и поддержание необходимой ориентации КА. Каждая из этих операций приводит к накоплению кинетического момента ГС и, следовательно, требует дополнительные энергетические затраты на управление ориентацией КА (а именно расход рабочего тела на разгрузку ГС).
Задачей, стоящей перед предлагаемыми способом, является увеличение объема получаемой при зондировании атмосферы Земли полезной информации (информативности зондирования) при минимизации требуемых энергетических затрат орбитального КА с инерционными исполнительными органами, движущегося по околокруговой орбите.
Технический результат достигается тем, что в способе управления ориентацией орбитального космического аппарата с инерционными исполнительными органами при зондировании атмосферы Земли, включающем навигационные измерения, разворот космического аппарата до совмещения оси минимального момента инерции космического аппарата с плоскостью орбиты и последующую стабилизацию космического аппарата в инерциальной системе координат, дополнительно измеряют высоту орбиты космического аппарата и определяют по ней значения углового полураствора видимого с космического аппарата диска Земли (Q) и угла возвышения верхней границы исследуемого слоя атмосферы над видимым с космического аппарата горизонтом Земли (ε), измеряют угловую скорость орбитального движения космического аппарата (ω), выполняют разворот космического аппарата вокруг оси минимального момента инерции до совмещения оси визирования прибора зондирования с плоскостью орбиты космического аппарата, ось минимального момента инерции которого составляет с осью визирования прибора зондирования угол, больший или равный значению угла Q, и последующую стабилизацию космического аппарата в инерциальной системе координат, фиксируют момент времени (to) совмещения направления оси визирования прибора зондирования с направлением, противоположным вектору скорости космического аппарата, при условии, что фиксированная ось минимального момента инерции космического аппарата одновременно составляет прямые или острые углы с радиус-вектором космического аппарата и вектором, противоположным вектору скорости космического аппарата, непрерывно измеряют угол между осью визирования прибора зондирования и направлением на видимый с космического аппарата горизонт Земли (γ) и в момент его обнуления разворачивают космический аппарат вокруг оси минимального момента инерции до достижения значения угла γ, равного значению угла ε, путем выполнения разворота космического аппарата в ориентацию, получаемую из углового положения космического аппарата на зафиксированный момент времени to поворотом космического аппарата вокруг фиксированной оси минимального момента инерции на угол δ, определяемый по формуле
δ=arccos{[cos(Q+ε)+cosλsin(λ-ω(tk-to))]/[sinλcos(λ-ω(tk-to))]},
где tk - момент времени окончания данного разворота,
λ - угол между осью визирования прибора зондирования и осью минимального момента инерции космического аппарата,
после чего продолжают стабилизацию космического аппарата в инерциальной системе координат, определяют момент обнуления измеряемого угла γ и в момент его обнуления повторяют указанные действия, а после момента времени прохождения положения на орбите, в котором проекция оси визирования прибора зондирования на плоскость орбиты космического аппарата направлена против радиус-вектора космического аппарата, наступающего по истечении интервала времени длительностью Δt от зафиксированного момента времени to, где длительность Δt определяется по формулам
Δt=(λ+90°)/ω при λ≤(Q+ε),
и
Δt=[λ+90°-arccos(cosλ/cos(Q+ε))]/ω при λ>(Q+ε),
сравнивают значение измеряемого угла γ со значением угла ε и в момент равенства данных углов разворачивают космический аппарат вокруг оси минимального момента инерции до достижения нулевого значения угла γ путем выполнения разворота космического аппарата в ориентацию, получаемую из углового положения космического аппарата на зафиксированный момент времени to поворотом космического аппарата вокруг фиксированной оси минимального момента инерции на угол δ, определяемый при λ≤(Q+ε) по формуле
δ=180°-arccos{[cosQ+cosλsin(λ-ω(tk-to))]/[sinλcos(λ-ω(tk-to))]},
а при λ>(Q+ε) определяемый по формуле
δ=arccos{[cosQ+cosλsin(λ-ω(tk-to))]/[sinλcos(λ-ω(tk-to))]},
где tk - момент времени окончания данного разворота,
после чего продолжают стабилизацию космического аппарата в инерциальной системе координат, сравнивают значение измеряемого угла γ со значением угла ε и в момент равенства данных углов повторяют указанные действия.
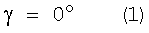
Суть предлагаемых изобретений поясняется на фиг.1-5, на которых приведены: на фиг.1 - схема, поясняющая определение углов Q и ε; на фиг.2 и 3 - схемы, поясняющие построение ориентации КА по предлагаемому способу для случаев соответственно λ≤Q+ε и λ>Q+ε; на фиг.4 - схема, поясняющая прохождение оси визирования ПЗ через атмосферу Земли при выполнении зондирования атмосферы по предлагаемому способу; на фиг.5 - блок-схема реализующей способ системы.
На фиг.1 обозначено:
О - центр Земли;
Rz - радиус Земли;
Р - поверхность Земли;
F - KA;
G - орбита КА;
С - верхняя граница исследуемого слоя атмосферы Земли;
Натм - высота верхней границы исследуемого слоя атмосферы Земли от поверхности Земли;
OF - радиус-вектор КА;
Норб - высота орбиты КА;
Q - угловой полураствор видимого с КА диска Земли;
ε - угол возвышения верхней границы исследуемого слоя атмосферы Земли над видимым с КА горизонтом Земли;
L - вектор направления оси визирования ПЗ;
FF1 - ось ММИ КА;
λ - угол между осью визирования ПЗ и направлением оси ММИ КА;
γ - угол возвышения оси визирования ПЗ над видимым с КА горизонтом Земли.
На фиг.2 и 3 дополнительно обозначено:
V - вектор скорости КА;
Т0 - положение КА в момент времени to, в который вектор направления оси визирования ПЗ противоположен вектору скорости КА;
Тс - положение КА в момент времени tc;
B1, Вi - положения КА в моменты начала выполнения разворота КА до момента времени tc (в данных положениях ось визирования ПЗ направлена на видимый с КА горизонт Земли);
A1, Аi - положения КА в моменты окончания выполнения разворота КА до момента времени tc (в данных положениях ось визирования ПЗ касается верхней границы исследуемого слоя атмосферы Земли);
Bj, Bk - положения КА в моменты начала выполнения разворота КА после момента времени tc (в данных положениях ось визирования ПЗ касается верхней границы исследуемого слоя атмосферы Земли);
Aj, Аk - положения КА в моменты окончания выполнения разворота КА после момента времени tc (в данных положениях ось визирования ПЗ направлена на видимый с КА горизонт Земли);
А0, Bk+1 - положения КА, в которых ось визирования ПЗ касается верхней границы исследуемого слоя атмосферы Земли;
A1M1, AiMi, AjMj - направления оси ММИ КА;
A1P1, AiPi, AjPj, TcPc - проекции оси визирования ПЗ на плоскость орбиты;
A1L1, AiLi, AjLj, TcLc - направления оси визирования ПЗ;
A1N1, AiNi, AjNj, TcNc - направления от КА к центру Земли.
Тс`Мс`, Тс`Рс`, Tc`Lc`, Tc`Nc` - направления, используемые при определении вспомогательной точки Тc`.
На фиг.4 дополнительно обозначено:
N - нормаль к плоскости орбиты КА;
a0,…,k, b1,…,k+1 - точки прохождения оси визирования ПЗ через атмосферу Земли в соответствующих положениях КА А0,…,k, B1,…,k+1.
Сущность предлагаемого способа состоит в следующем.
При касании осью визирования ПЗ видимого с КА горизонта Земли (точка B1)
КА разворачивают вокруг оси ММИ на такой угол, что на момент окончания разворота угол возвышения оси визирования ПЗ над видимым с КА горизонтом Земли составляет угол, равный угловой толщине исследуемого слоя атмосферы Земли ε (точка A1)
После чего продолжают стабилизацию КА в инерциальном пространстве до следующего касания осью визирования ПЗ горизонта Земли и производят следующий разворот КА вокруг оси ММИ КА (соответственно точки Вi, Аi).
При этом в процессе стабилизации КА между точками Аi и Bi+1 измеряемый угол γ уменьшается, и его уменьшение сохраняется, пока значение угла между проекцией оси визирования ПЗ на плоскость орбиты КА Lp и скоростью КА V более 90°.
Начиная с момента времени tc, после которого угол между проекцией оси визирования ПЗ на плоскость орбиты КА Lp и скоростью КА V становится меньше 90°, меняем действия следующим образом. При касании осью визирования ПЗ верхней границы исследуемого слоя атмосферы Земли (точка Bj; γ=ε) КА разворачивают вокруг оси ММИ КА на такой угол, что на момент окончания разворота ось визирования ПЗ касается видимого с КА горизонта Земли (т. Aj; γ=0°). После чего продолжают инерциальную стабилизацию КА до следующего касания осью визирования ПЗ верхней границы исследуемого слоя атмосферы Земли и производят следующий разворот КА вокруг оси ММИ КА.
При этом в процессе стабилизации КА между точками Aj и Bj+1 измеряемый угол γ увеличивается, поскольку угол между проекцией оси визирования ПЗ на плоскость орбиты КА Lp и скоростью КА V менее 90°.
Для обеспечения возможности прохождения оси визирования ПЗ через атмосферу Земли в течение всей рассматриваемой части витка, включая момент tc, требуется выполнение дополнительного условия на угол установки оси визирования ПЗ относительно оси ММИ КА:
Исследуемый слой атмосферы, как правило, задается высотой своей верхней границы от поверхности Земли (высота нижней границы принята равной нулю). Определение углов Q и ε осуществляется по следующим формулам (см. фиг.1):

Для построения исходной ориентации КА разворачивают таким образом, что ось ММИ КА и ось визирования ПЗ находятся в плоскости орбиты КА, при этом в момент времени to ось визирования ПЗ направлена против вектора скорости КА, а направление фиксированной оси ММИ КА одновременно составляет прямые или острые углы с радиус-вектором КА и вектором, противоположным вектору скорости КА (в качестве фиксированной оси ММИ КА рассматриваем одно из двух возможных взаимно противоположных направлений, заданных с связанной с КА системе координат).
Поясним определение углов разворотов КА (см. фиг.2 и 3).
На момент окончания разворота, выполняемого вокруг фиксированной оси ММИ КА до достижения значения угла γ=ε (точка Аi, условие (2)), в сферическом треугольнике, образованном направлениями AiNi, AiMi, AiLi, имеем: угол NiМiLi=δi, угол NiAiLi=Q+ε, угол MiAiLi=λ и

где tk - момент времени окончания данного разворота (точка Аi).
Введем обозначение

По формуле решения сферического треугольника имеем


Таким образом на момент окончания разворота (точка Аi) строится ориентация КА, получаемая из ориентации КА на момент времени to поворотом КА вокруг фиксированной оси ММИ на угол δ, определяемый по формуле (10) или

Момент времени tc, в который угол между проекцией оси визирования ПЗ на плоскость орбиты КА Lp и скоростью КА V меняет значение с «больше 90°» на «меньше 90°», (точка Тc) с достаточной точностью совпадает с моментом прохождения положения КА (обозначим его как точка Тc`, Тс`≈Тс), в котором при Q≤λ≤Q+ε (см. фиг.2) фиксированная ось ММИ направлена против радиус-вектора КА

а при λ>Q+ε (см. фиг.3) - фиксированная ось ММИ составляет острый угол с направлением, противоположным вектору скорости КА, и угол, равный λс, с направлением, противоположным радиус-вектору КА

где λс определяется из соотношений, полученных из решения прямоугольного сферического треугольника, образованного направлениями Tc`Nc`=Tc`Pc`, Tc`Lc`, Тс`Мс`, в котором угол Nc`Tc`Mc`=λc, угол Nc`Tc`Lc`=Q+ε, угол Lc`Tc`Mc`=λ, угол Mc`Nc`Lc`=90°.
По формуле решения прямоугольного сферического треугольника

Использование символа штриха «`» указывает, что данные направления Тc`Мc`, Тc`Тc`, Tc`Lc`, Tc`Nc` практически близки к соответствующим направлениям ТcМc, ТcРc, TcLc, TcNc, реализуемым в момент времени tc.
Таким образом, момент tc наступает по истечении интервала времени длительностью Δt, определяемой по формулам


от момента времени to

На момент окончания разворота, выполняемого вокруг фиксированной оси ММИ КА до достижения значения угла γ=0° (точка Aj, условие (1)), в сферическом треугольнике, образованном направлениями AjNj, AjMj, AjLj, имеем: угол NjMjLj=δj, угол NjAjLj=Q+ε, угол MjAjLj=λ и

где tk - момент времени окончания данного разворота (точка Aj).
С учетом обозначения (8) решаем данный сферический треугольник

Тогда на момент окончания данного разворота (точка Аj) строится ориентация КА, получаемая из ориентации КА на момент времени to поворотом КА вокруг фиксированной оси ММИ на угол δ, определяемый при Q≤λ≤Q+ε (см. фиг.2) по формуле

а при λ>Q+ε (см. фиг.3) определяемый по формуле (21) или

Непосредственное зондирование атмосферы осуществляется при выполнении условия

Для иллюстрации на фиг.4 представлена схема прохождения оси визирования ПЗ через атмосферу Земли для случая λ=90°.
На фиг.5, представляющей блок-схему реализующей предложенный способ системы, обозначено:
1 - ИУ; 2 - УПУ; 3 - ДМ; 4 - КА; 5 - ТДМ; 6 - ПУ; 7 - РУ; 8 - ПЗ;
9 - блок навигационных измерений (БНИ);
10 - блок определения времени выполнения разворотов КА (БОВВРКА);
11 - блок определения углов разворота КА (БОУРКА);
12 - блок определения моментов зондирования атмосферы Земли (БОМЗА).
Система функционирует следующим образом.
В БНИ (9) выполняются навигационные измерения по определению орбиты и углового положения КА, включая определение углов Q и ε по формулам (4), (6).
По выполненным в БНИ (9) определениям навигационных параметров в БОВВРКА (10) осуществляется определение моментов времени выполнения разворотов КА по условиям (1), (2) и с учетом определения момента времени tc по формулам (16)-(18), а в БОУРКА (11), исходя из соотношений (11), (23), (24), осуществляется определение углов разворотов КА.
Данная информация поступает в УПУ (2). По поступившим командам УПУ (2) осуществляет построение требуемой для выполнения сеанса зондирования атмосферы ориентации КА.
Построение требуемой ориентации и последующая стабилизация КА при выполнении сеанса зондирования обеспечивается функционированием контура управления, включающим маховики, которые создают управляющие моменты по осям КА в соответствии с сигналами ИУ (1), предварительно обработанными УПУ (2). УПУ (2) вычисляет командные сигналы, передающиеся в ДМ (3) и обеспечивающие управление рамами кардановых подвесов блока гироскопов при выполнении требуемого поворотного маневра КА.
Если блок гироскопов, снимая насыщение маховиков, «насытится», то с помощью реактивных ДО РУ (7) осуществится его разгрузка: в соответствии с сигналами тахометров о величине КМ маховиков, ПУ (6) определяет факт насыщения и уставки для работы РУ (7), по которым РУ (7) создает требуемый внешний момент. Но, учитывая что в данном способе ось ММИ КА находится в плоскости орбиты КА, то, как отмечалось ранее ([6], стр.41, 194; [7], стр.295-298; [10], стр.217-220), эффект «насыщения» ГС отсутствует и ее разгрузка в течение времени реализации эксперимента не требуется.
При этом БОМЗА (12) определяются моменты времени непосредственного зондирования атмосферы по измерениям угла γ проверкой условия (25).
БНИ (9) может быть выполнен на основе оптических визиров и датчиковой аппаратуры СУДН КА и системы орбитальных траекторных измерений (см. [4], [8]). БОВВРКА (10), БОУРКА (11), БОМЗА (12) могут быть выполнены в виде вычислителя на базе бортовой цифровой вычислительной системы (БЦВС) КА.
Опишем технический эффект предлагаемых изобретений.
Предлагаемый способ позволяет за один сеанс (на одном витке орбиты) выполнения зондирования атмосферы Земли получить максимально большой объем полезной информации. Предложенная совокупность действий позволяет без изменения ориентации оси ММИ КА в инерциальном пространстве и обеспечивая ее нахождение в плоскости орбиты КА, осуществлять зондирование атмосферы Земли на протяжении значительной части витка орбиты (от половины витка и более). При этом, за вычетом времени выполнения разворотов КА, зондирование осуществляется в инерциальной стабилизации КА.
Для иллюстрации на фиг.4 изображено прохождение оси визирования ПЗ через атмосферу Земли в предлагаемом способе. Зондирование атмосферы по прототипу представлено отрезком (а0, в1), а дополнительное зондирование атмосферы по предлагаемому техническому решению включает в себя зондирование на фоне разворотов КА вокруг оси ММИ КА (отрезки (bi, ai), (bj, аj)) и зондирование в режиме инерциальной стабилизации КА (отрезки (ai, bi+1), (aj, bj+1)).
Информативность зондирования пропорциональна пути прохождения оси визирования ПЗ через атмосферу. Например, для КА типа орбитальных космических станций при исследовании атмосферы угловой толщины 4° (что соответствует высоте верхней границы атмосферы от поверхности Земли ~ 100 км) данный путь (и информативность зондирования) увеличивается более чем в десять раз. Причем в одном сеансе удается провести зондирование по большому участку периметра видимого с КА горизонта Земли (от половины и более) за достаточно короткий отрезок времени (длительность витка орбиты орбитальных космических станций составляет около 90 мин). Такие измерения позволяют решать ряд новых научных задач по анализу состояния и динамике изменения параметров атмосферы Земли.
При этом все зондирование осуществляется при неизменной ориентации оси ММИ КА в плоскости орбиты, что соответствует благоприятным условиям функционирования ГС и минимизирует энергетические затраты на управление ориентацией КА.
Таким образом, предлагаемый способ позволяет за один сеанс зондирования атмосферы Земли получить максимально большой объем полезной информации при минимальных энергетических затратах КА.
ЛИТЕРАТУРА
1. Демин Л.С., Сарафанов Г.В. Наблюдения из космоса // Авиация и космонавтика. 1975, №9.
2. Оптические исследования излучения атмосферы, полярных сияний и серебристых облаков с борта орбитальной станции "Салют-4" // Издательство АН ЭССР, Тарту, 1977.
3. Лазарев А.И., Коваленок В.В., Авакян С.В. Исследование Земли с пилотируемых космических кораблей // Ленинград. Гидрометеоиздат, 1987.
4. Инженерный справочник по космической технике // Изд-во МО СССР, М., 1977.
5. Ковтун B.C., Платонов В.Н., Суханов Н.А., Величкин С.Б., Гусев С.И. Система управления ориентацией космического аппарата с силовыми гироскопами. Патент РФ 2006430 по заявке 5032611/22 от 17.03.92.
6. Бебенин Г.Г., Скребушевский B.C., Соколов Г.А. Системы управления полетом космических аппаратов // М.: Машиностроение, 1978.
7. Скребушевский Б.С. Управление полетом беспилотных космических аппаратов // М.: «Владмо», 2003.
8. Система управлением движением и навигации КА. Техническое описание. 300ГК.12Ю.0000-АТО. РКК «Энергия», 1998.
9. Спецификация Российского сегмента. Программа Международная космическая станция. SSP 41163. Редакция Н, 27.01.2001.
10. Сарычев В.А., Беляев М.Ю., Зыков С.Г., Сазонов В.В., Тесленко В.П. Математическое моделирование процессов поддержания ориентации орбитальной станции «Мир» с помощью гиродинов. // Космические исследования, 1991, т.29, вып.2.
11. Сарычев В.А., Беляев М.Ю., Зыков С.Г., Зуева Е.Ю., Сазонов В.В., Сайгираев Х.У. Математическое моделирование режимов ориентации орбитального комплекса "Мир" с дополнительными научными модулями // Труды XXIV Чтений К.Э.Циолковского. Секция «Проблемы ракетной и космической техники». - М.: ИИЕТ АН СССР. 1990.
Способ управления ориентацией орбитального космического аппарата (КА) с инерционными исполнительными органами при зондировании атмосферы Земли относится к космической технике. Способ управления КА заключается в навигационных измерениях, развороте КА до совмещения оси минимального момента инерции (ММИ) КА с плоскостью орбиты и последующей стабилизации КА в инерциальной системе координат (ИСК). Дополнительно измеряют высоту орбиты КА и определяют по ней значения углового полураствора видимого с КА диска Земли (Q) и угла возвышения верхней границы исследуемого слоя атмосферы над видимым с КА горизонтом Земли (ε), измеряют угловую скорость орбитального движения КА (ω), выполняют разворот КА вокруг оси ММИ до совмещения оси визирования прибора зондирования с плоскостью орбиты КА, ось ММИ которого составляет с осью визирования прибора зондирования угол, больший или равный значению угла Q, и последующую стабилизацию КА аппарата в ИСК. Дополнительное зондирование атмосферы включает в себя зондирование на фоне разворотов КА вокруг оси ММИ и зондирование в режиме инерциальной стабилизации КА. Технический результат изобретения заключается в увеличении информативности зондирования при минимальных энергетических затратах. 5 ил.
Способ управления ориентацией орбитального космического аппарата с инерционными исполнительными органами при зондировании атмосферы Земли, включающий навигационные измерения, разворот космического аппарата до совмещения оси минимального момента инерции космического аппарата с плоскостью орбиты и последующую стабилизацию космического аппарата в инерциальной системе координат, отличающийся тем, что дополнительно измеряют высоту орбиты космического аппарата и определяют по ней значения углового полураствора видимого с космического аппарата диска Земли (Q) и угла возвышения верхней границы исследуемого слоя атмосферы над видимым с космического аппарата горизонтом Земли (ε), измеряют угловую скорость орбитального движения космического аппарата (ω), выполняют разворот космического аппарата вокруг оси минимального момента инерции до совмещения оси визирования прибора зондирования с плоскостью орбиты космического аппарата, ось минимального момента инерции которого составляет с осью визирования прибора зондирования угол, больший или равный значению угла Q, и последующую стабилизацию космического аппарата в инерциальной системе координат, фиксируют момент времени (to) совмещения направления оси визирования прибора зондирования с направлением, противоположным вектору скорости космического аппарата, при условии, что фиксированная ось минимального момента инерции космического аппарата одновременно составляет прямые или острые углы с радиус-вектором космического аппарата и вектором, противоположным вектору скорости космического аппарата, непрерывно измеряют угол между осью визирования прибора зондирования и направлением на видимый с космического аппарата горизонт Земли (γ) и в момент его обнуления разворачивают космический аппарат вокруг оси минимального момента инерции до достижения значения угла γ, равного значению угла ε, путем выполнения разворота космического аппарата в ориентацию, получаемую из углового положения космического аппарата на зафиксированный момент времени to поворотом космического аппарата вокруг фиксированной оси минимального момента инерции на угол δ, определяемый по формуле
δ=arccos{[cos(Q+ε)+cosλsin(λ-ω(tk-to))]/[sinλcos(λ-ω(tk-to))]},
где tk - момент времени окончания данного разворота,
λ - угол между осью визирования прибора зондирования и осью
минимального момента инерции космического аппарата,
после чего продолжают стабилизацию космического аппарата в инерциальной системе координат, определяют момент обнуления измеряемого угла γ и в момент его обнуления повторяют указанные действия, а после момента времени прохождения положения на орбите, в котором проекция оси визирования прибора зондирования на плоскость орбиты космического аппарата направлена против радиус-вектора космического аппарата, наступающего по истечении интервала времени длительностью Δt от зафиксированного момента времени to, где длительность Δt определяется при λ≤(Q+ε) по формуле
Δt=(λ+90°)/ω,
а при λ>(Q+ε) по формуле
Δt=[λ+90°-arccos(cosλ/cos(Q+E))]/ω,
сравнивают значение измеряемого угла γ со значением угла ε и в момент равенства данных углов разворачивают космический аппарат вокруг оси минимального момента инерции до достижения нулевого значения угла γ путем выполнения разворота космического аппарата в ориентацию, получаемую из углового положения космического аппарата на зафиксированный момент времени tо поворотом космического аппарата вокруг фиксированной оси минимального момента инерции на угол δ, определяемый при λ≤(Q+ε) по формуле
δ=180°-arccos{[cosQ+cosλsin(λ-ω(tk-to))]/[sinλcos(λ-ω(tk-to))]},
а при λ>(Q+s) по формуле
δ=arccos {[cosQ+cosλsin(λ-ω(tk-to))]/[sinλcos(λ-ω(tk-to))]},
где tk - момент времени окончания данного разворота,
после чего продолжают стабилизацию космического аппарата в инерциальной системе координат, сравнивают значение измеряемого угла γ со значением угла ε и в момент равенства данных углов повторяют указанные действия.
| СИСТЕМА УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ | 1992 |
|
RU2006430C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2001 |
|
RU2207969C2 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
| Устройство для оклейки кубиков двумя этикетками | 1969 |
|
SU441205A1 |
| US 6019320 A, 01.02.2000. | |||

