Изобретение относится к области телеуправления машинами, в частности, летательными аппаратами, и может быть использовано в комплексах управляемого вооружения с полуавтоматической лучевой системой наведения.
Известен способ [1] формирования оптического поля для телеориентирования управляемых объектов, преимущественно управляемых летательных аппаратов, включающий излучение оптического потока и заполнение им зоны в окрестности оптической оси визира, отличающийся тем, что заполнение зоны производят путем ее сканирования плоскими лучами, причем лучи отклоняются со взаимным сдвигом по времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от оптической оси визира, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира.
Известен оптический прицел [2] системы наведения управляемого снаряда, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер, выполненный в виде вращающейся призмы, и панкратический объектив, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, первый из которых снимает сигнал с непрозрачной шторки, и формирователь импульсов, первый и второй выходы которого подключены к входам первого и второго лазеров соответственно, отличающийся тем, что он снабжен растровым диском, ось вращения которого совпадает с осью вращения призмы, сигнал с которого снимается с помощью второго оптронного датчика, выход которого подключен ко второму входу формирователя импульсов, при этом непрозрачная шторка выполнена с оптически прозрачной щелью, а первый вход формирователя импульсов подключен к выходу первого оптронного датчика.
Известный оптический прицел выбран в качестве прототипа.
Известный оптический прицел [2] реализует способ [1] формирования оптического поля для телеориентирования управляемых объектов и работает следующим образом. Вращающаяся призма производит нутационное сканирование плоскими лучами первого и второго лазеров по формируемому полю. Радиус траектории сканирования на дальности управляемого снаряда поддерживается постоянным за счет изменения фокусного расстояния панкратического объектива. При этом в ходе сканирования призмы шторка оправы и растровый диск производят прерывание сигналов в оптронных датчиках, выходы которых соединены с формирователем импульсов лазеров. Таким образом, известно фактическое положение луча каждого лазера в пространстве независимо от скорости и равномерности вращения пластинки сканера, что существенно повышает точность выделения координат управляемым снарядом, исключает биения и шумы выделения координат, связанные с мгновенной и средней неравномерностями вращения сканирующей пластины во всех условиях эксплуатации прицела.
Недостатком известного оптического прицела является система вывода излучения лазеров на единую оптическую ось и оптический сканер, из-за которых горизонтальный и вертикальный лучи, сканирующие поле управления, пересекают ось визира с интервалом равным четверти периода сканирования, следовательно, управляемый объект, находящийся вблизи оси визира, принимает информацию, соответственно о вертикальном или горизонтальном отклонении от оси визира, с задержкой равной четверти периода сканирования, что влечет ошибку в определении этого отклонения, тем самым снижая точность наведения управляемого объекта.
Кроме того, недостатком первого варианта известного оптического прицела является устройство оптического сканера, выполненного в виде вращающейся призмы с системой определения положения луча лазера в пространстве в виде непрозрачной шторки, установленной на оправу вращающейся призмы, и оптронных датчиков, поскольку наличие вращающихся деталей ведет к уменьшению ресурса известного оптического прицела, а оптронные датчики при попадании на них пыли или смазки от вращающихся деталей могут давать ложные показания, что влечет за собой ошибочное определение положения луча лазера в пространстве и существенное снижение точности наведения.
Целью изобретения является повышение точности наведения управляемого объекта, увеличение надежности и ресурса устройства формирования поля управления для телеориентирования управляемого объекта.
Поставленная цель достигается тем, что в устройстве формирования оптического поля для телеориентирования управляемых объектов, которые содержат установленные соосно визир и прожектор, включающий в себя формирователь импульсов, инжекционный лазер, оптический элемент и объектив, при этом выход формирователя импульсов соединен с лазером, в прожектор введены матрица отклоняемых микрозеркал и блок управления, первый выход которого соединен со входом матрицы отклоняемых микрозеркал, а второй выход соединен со входом формирователя импульсов, причем оптическая ось объектива и ось излучения лазера лежат в плоскости перпендикулярной осям отклонения микрозеркал и пересекаются на одном из микрозеркал под углом равным удвоенному углу отклонения микрозеркал от плоскости, которая содержит оси отклонения микрозеркал, а лазер установлен вблизи фокальной плоскости системы, образованной оптическим элементом, микрозеркалами и объективом.
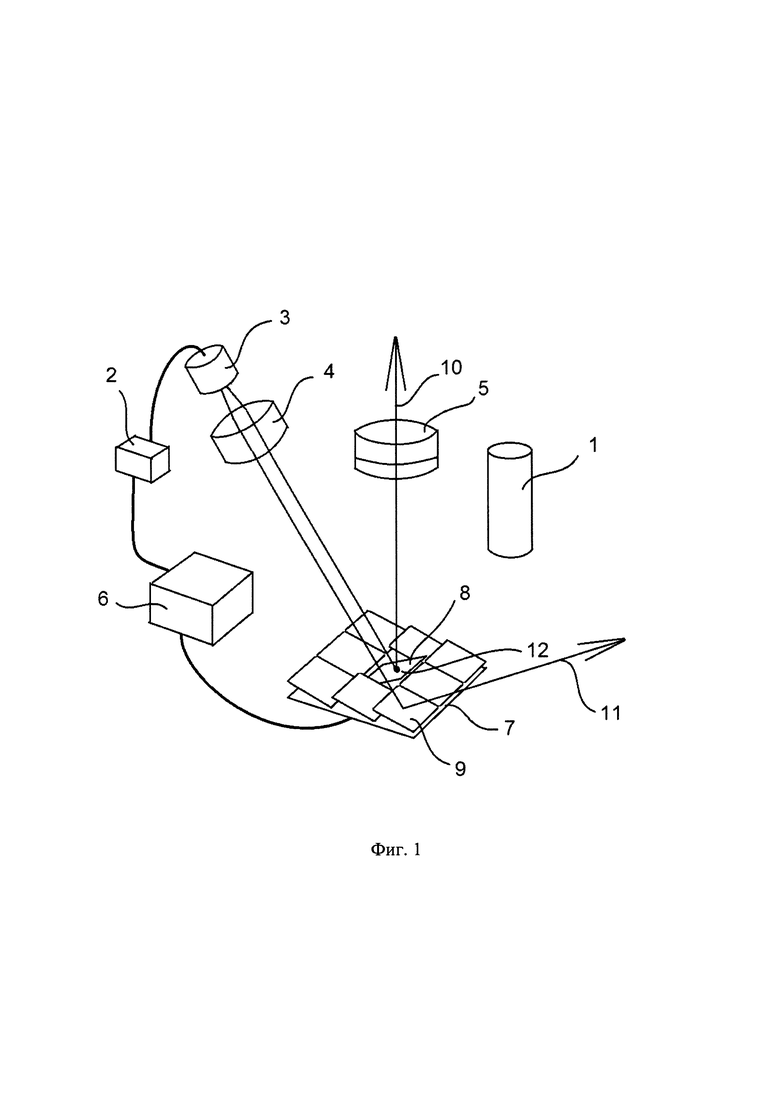
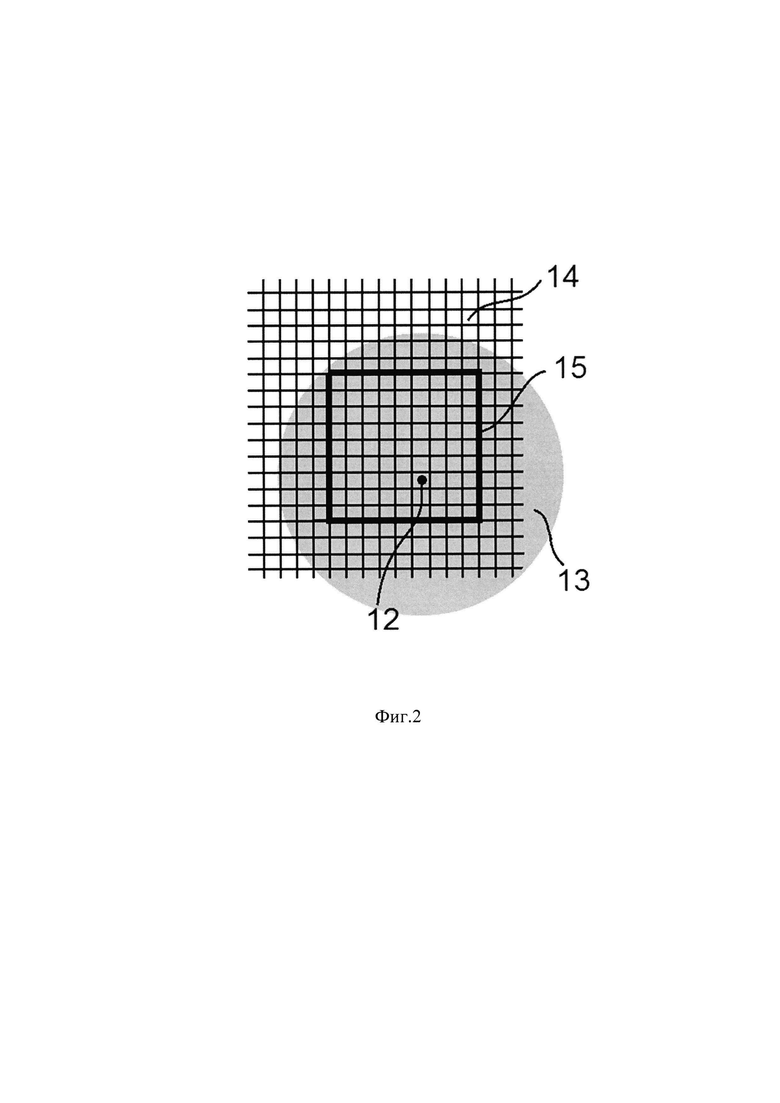
Структура предлагаемого устройства представлена на фиг. 1. Устройство содержит установленные соосно визир 1 и прожектор, содержащий формирователь импульсов 2, выход которого соединен с инжекционным лазером 3. Формирователь импульсов усиливает приходящий импульс до уровня необходимого для запуска инжекционного лазера. Лазер имеет различные углы расходимости в плоскостях параллельной и перпендикулярной телу свечения. Оптический элемент 4, расположенный на оси луча, служит для выравнивания углов расходимости лазерного луча в данных плоскостях и может быть выполнен в виде цилиндрической линзы. Прожектор также содержит панкратический объектив 5, блок управления 6, первый выход которого соединен с формирователем импульсов, а второй - с матрицей отклоняемых микрозеркал 7. Блок управления может быть выполнен на основе программируемой логической интегральной схемы (ПЛИС). Матрица отклоняемых микрозеркал представляет собой известное из уровня техники микроэлектромеханическое устройство, состоящее из неподвижного корпуса и набора одинаковых отклоняемых плоских микрозеркал (характерный поперечник каждого 10 мкм). Оси отклонения микрозеркал параллельны и лежат в одной плоскости параллельной установочной плоскости матрицы. В начальном состоянии микрозеркала, его отражающая поверхность, параллельна установочной плоскости матрицы. Каждое микрозеркало во включенном положении (поз. 8, отклонено от начального состояния на угол А), или в выключенном состоянии (поз. 9, отклонено от начального состояния на угол минус А). Характерное значение А=10 град. Оптическая ось объектива и ось лазерного излучения пересекаются под углом 2А в точке 12, лежащей на одном из микрозеркал. Лазер 3 устанавливается вблизи фокальной плоскости системы, образуемой объективом 5 и оптическим элементом 4, учитывая излом хода лучей 10 при их отражении от включенных микрозеркал 8. Расстояние между лазером и оптическим элементом подбирается с тем расчетом, чтобы в пятно лазерного луча 13 на поверхности набора микрозеркал 14 полностью попадала область 15, содержащая микрозеркало 12 (Фиг. 2). При включении всех микрозеркал области 15 она проецируется объективом на все поле управления ширины DH и высоты DV, расположенное на дальности L. При включении не всех микрозеркал области 15, а только одной строки или только одного столбца области, поле управления освещается плоским вертикальным или горизонтальным лучом. При этом лучи 11, отраженные от выключенных микрозеркал 9, не проходят через объектив и не проецируются на поле управления. Излучение лазера ведется парами импульсов, интервал между которыми постоянен для каждого из лучей и имеет свое значение для горизонтального и вертикального луча. Для удобства будем называть пару импульсов вертикального луча горизонтальной посылкой, а пару импульсов горизонтального луча - вертикальной посылкой. Обозначим ΔТН и ΔTV интервал соответственно между горизонтальными и вертикальными посылками.
Пусть NH0 и NH1 - число столбцов области 15, расположенных по разные стороны от микрозеркала 12, NV0 и NV1 - число строк области 15, расположенных по разные стороны от микрозеркала 12. Условимся, что столбцы области занумерованы целыми числами, например слева направо, от (-NH0) до NH1, а строки области занумерованы целыми числами, например сверху вниз, от (-NV0) до NV1. В этом случае столбец, содержащий микрозеркало 12, имеет номер 0, а строка, содержащая микрозеркало 12, имеет номер 0. Общее число столбцов области NH=NH1+NH0+1, общее число строк области NV=NV1+NV0+1.
Предлагаемое устройство работает следующим образом.
С помощью визира 5 прожектор 6 ориентируется в нужном направлении.
Блок управления выполняет следующие действия:
1.1) устанавливает значение ΔТН, соответствующее нулевому горизонтальному отклонению от оси визира,
1.2) устанавливает значение ΔTV, соответствующее нулевому вертикальному отклонению от оси визира,
1.3) включает столбец номер 0,
1.4) формирует горизонтальную посылку в текущий момент времени TH0,
1.5) выключает столбец номер 0,
1.6) включает строку номер 0,
1.7) формирует вертикальную посылку в текущий момент времени TV0,
1.8) выключает строку номер 0,
1.9) включает столбец номер 0,
1.10) формирует горизонтальную посылку в момент времени TH1=TH0+ΔTH,
1.11) выключает столбец номер 0,
1.12) включает строку номер 0,
1.13) формирует вертикальную посылку в момент времени TV1=TV0+ΔTV,
1.14) выключает строку номер 0,
2) выполняет циклически операции 2.1-2.16 пока одновременно j<NH1 и i<NV1,
2.1) если j<NH1, увеличивает значение j на 1,
2.2) если i<NV1, увеличивает значение i на 1,
2.3) устанавливает значение ΔTH, соответствующее горизонтальному отклонению от оси визира на угол arctg(j⋅DH/(NH⋅L)),
2.4) устанавливает значение ΔTV, соответствующее вертикальному отклонению от оси визира на угол arctg(i⋅DV/(NV⋅L)),
2.5) включает столбец номер j,
2.6) формирует горизонтальную посылку в момент времени THj+1=THj+ΔTH,
2.7) выключает столбец номер j,
2.8) включает строку номер i,
2.9) формирует вертикальную посылку в момент времени TVi+1=TVi+ΔTV,
2.10) выключает строку номер i,
2.11) включает столбец номер j,
2.12) формирует горизонтальную посылку в момент времени THj+2=THj+1+ΔTH,
2.13) выключает столбец номер j,
2.14) включает строку номер i,
2.15) формирует вертикальную посылку в момент времени TVi+2=TVi+1+ΔTV,
2.16) выключает строку номер i,
3) выполняет циклически операции 3.1-1.16 пока одновременно j>(-NH0) и i>(-NV0),
3.1) если j>(-NH0), уменьшает значение j на 1,
3.2) если i>(-NV0), уменьшает значение i на 1,
3.3) устанавливает значение ΔTH, соответствующее горизонтальному отклонению от оси визира на угол arctg(j⋅DH/(NH⋅L)),
3.4) устанавливает значение ΔTV, соответствующее вертикальному отклонению от оси визира на угол arctg(i⋅DV/(NV⋅L)),
3.5) включает столбец номер j,
3.6) формирует горизонтальную посылку в момент времени THj+1=THj+ΔTH,
3.7) выключает столбец номер j,
3.8) включает строку номер i,
3.9) формирует вертикальную посылку в момент времени TVi+1=TVi+ΔTV,
3.10) выключает строку номер i,
3.11) включает столбец номер j,
3.12) формирует горизонтальную посылку в момент времени THj+2=THj+1+ΔTH,
3.13) выключает столбец номер j,
3.14) включает строку номер i,
3.15) формирует вертикальную посылку в момент времени TVi+2=TVi+1+ΔTV,
3.16) выключает строку номер i,
4) повторяет циклически операции 2 и 3.
Размеры поля управления DH×DV на текущей дальности L до управляемого объекта поддерживается постоянными за счет изменения фокусного расстояния панкратического объектива.
Таким образом, блок управления последовательно формирует вертикальную и горизонтальную посылки, изменяя интервал между ними в зависимости от отклонения от оси визира соответствующего плоского луча, получаемого включением единственного столбца области 15 на время излучения вертикальной посылки или включением единственной строки области 15 на время излучения горизонтальной посылки. При этом последовательно обходятся все пары столбец-строка, начиная со столбца, содержащего микрозеркало 12, и строки, содержащей микрозеркало 12, а интервал между горизонтальными посылками, соответствующий нулевому горизонтальному отклонению от оси визира, и интервал между вертикальными посылками, соответствующий нулевому вертикальному отклонению от оси визира, перекрываются по времени. Тем самым горизонтальный и вертикальный лучи пересекают ось визира одновременно, что существенно повышает точность наведения управляемого объекта по сравнению с прототипом. Увеличение надежности и увеличение ресурса предлагаемого устройства по сравнению с прототипом достигается за счет исключения вращающихся деталей.
Источники информации.
1. Патент RU 2100745 от 27.12.1997 «Способ формирования оптического поля для телеориентирования управляемых объектов и устройство для его осуществления».
2. Патент RU 2623687 от 28.06.2017 «Оптический прицел системы наведения управляемого снаряда (варианты)».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| Оптический прицел системы наведения управляемого объекта (варианты) | 2023 |
|
RU2825201C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| Способ фокусировки оптики аппаратурных каналов с поэлементным формированием информационного поля | 2017 |
|
RU2660422C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРИЦЕЛА СИСТЕМЫ ТЕЛЕОРИЕНТИРОВАНИЯ С ИЗЛУЧАЮЩИМИ КАНАЛАМИ НА ИНЖЕКЦИОННЫХ ЛАЗЕРАХ | 1996 |
|
RU2115878C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 1997 |
|
RU2123166C1 |
Устройство может быть использовано в комплексах управляемого вооружения с системой телеориентирования в оптическом поле, формируемом лучом лазера. Устройство содержит установленные соосно визир и прожектор, включающий в себя формирователь импульсов, инжекционный лазер, оптический элемент и объектив. В прожектор введены матрица отклоняемых микрозеркал и блок управления, первый выход которого соединен со входом матрицы отклоняемых микрозеркал, а второй выход соединен со входом формирователя импульсов, выход которого соединен с лазером. Оптическая ось объектива и ось излучения лазера лежат в плоскости, перпендикулярной осям отклонения микрозеркал, и пересекаются на одном из микрозеркал под углом, равным удвоенному углу отклонения микрозеркал от плоскости, содержащей оси отклонения микрозеркал, а лазер установлен вблизи фокальной плоскости системы, образованной оптическим элементом, микрозеркалами и объективом. Технический результат - повышение точности наведения, увеличение надежности и ресурса устройства. 2 ил.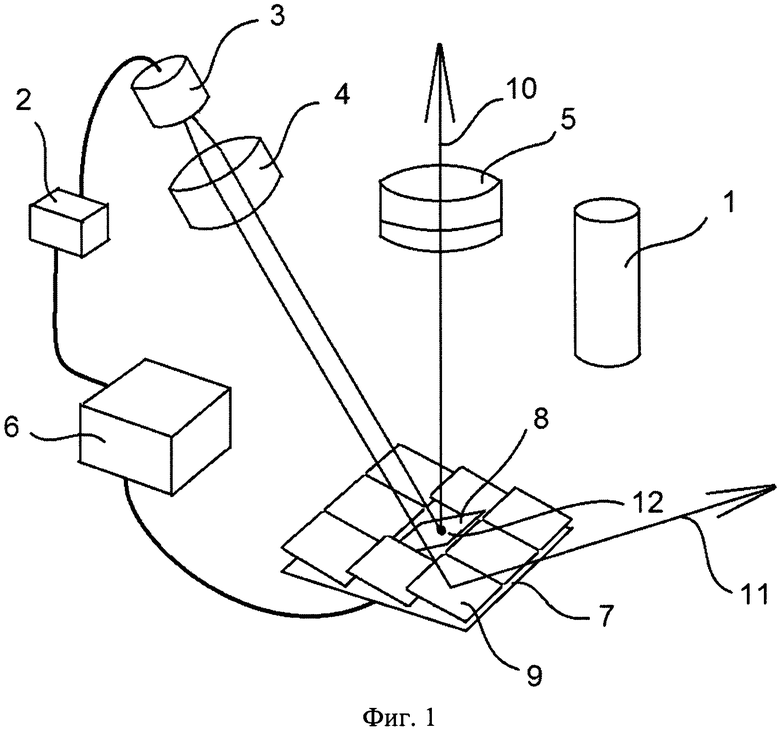
Устройство формирования оптического поля для телеориентирования управляемых объектов, содержащее установленные соосно визир и прожектор, включающий в себя формирователь импульсов, инжекционный лазер, оптический элемент и объектив, при этом выход формирователя импульсов соединен с лазером, отличающееся тем, что в прожектор введены матрица отклоняемых микрозеркал и блок управления, первый выход которого соединен со входом матрицы отклоняемых микрозеркал, а второй выход соединен со входом формирователя импульсов, причем оптическая ось объектива и ось излучения лазера лежат в плоскости, перпендикулярной осям отклонения микрозеркал, и пересекаются на одном из микрозеркал под углом, равным удвоенному углу отклонения микрозеркал от плоскости, содержащей оси отклонения микрозеркал, а лазер установлен вблизи фокальной плоскости системы, образованной оптическим элементом, микрозеркалами и объективом.
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| US 2018245882 A1, 30.08.2018 | |||
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| US 6568627 B1, 27.05.2003 | |||
| US 4709875 A1, 01.12.1987. | |||

