Изобретение относится к оптическим системам наведения управляемых объектов.
Известно устройство для формирования оптического поля для телеориентирования управляемых объектов, описанное в патенте на изобретение РФ № 2100745, содержащее установленные соосно визир и прожектор, включающий источники света и оптическую систему, при этом прожектор выполнен в виде как минимум одной пары аналогичных ветвей, каждая из которых содержит схему запуска, последовательно установленные инжекционный лазер, отклоняющий оптический элемент, объектив, причем лазер установлен вблизи фокальной плоскости системы образуемой объективом и отклоняющим оптическим элементом, излучающие области лазеров установлены перпендикулярно осям измеряемых координат, отклоняющие оптические элементы выполнены в виде цилиндрических линз, закрепленных на общей рамке, установленной в корпусе на коленчатых валиках с возможностью плоскопараллельного движения по окружности, при этом оси цилиндрических поверхностей линз параллельны излучающим областям лазеров, входы схем запуска соединены с выходами блоков кодирования, входы которых подсоединены к выходам блока модуляции, входы которого соединены с приводом рамки и первым выходом программного устройства, выходы схем запуска соединены с лазерами, второй выход программного устройства соединен с приводом рамки.
Недостатком данного устройства является сложность реализации механизма плоскопараллельного движения, и как следствие этого, ненадежность такого механизма.
Известен оптический прицел системы наведения, описанный в патенте на изобретение РФ №2623687, и выбранный нами в качестве прототипа. Он содержит установленные соосно визир и прожектор, включающий в себя два инжекционных лазера - первый и второй, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, оптический сканер, выполненный в виде вращающейся призмы, и панкратический объектив, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, первый из которых снимает сигнал с непрозрачной шторки, и формирователь импульсов, первый и второй выходы которого подключены к входам первого и второго лазеров соответственно, а также растровый диск, ось вращения которого совпадает с осью вращения призмы, сигнал с которого снимается с помощью второго оптронного датчика, выход которого подключен ко второму входу формирователя импульсов, при этом, непрозрачная шторка имеет оптически прозрачную щель, а первый вход формирователя импульсов подключен к выходу первого оптического датчика.
Недостатком данной конструкции является то, что при формировании поля управления используется только половина тела свечения лазера (половина излучающей поверхности лазера), а вторая половина не участвует в формировании поля управления, что приводит к тому, что используется только половина всей энергетической составляющей лазера (его мощности), что снижает запасы оптического канала наведения и, как следствие, ухудшает его работу при неблагоприятных условиях работы (метеоусловиях) и уменьшает дальность действия системы наведения.
Задачей данного изобретения является повышение дальности наведения и расширение поля наведения оптического прицела системы наведения управляемого объекта.
Решение поставленной задачи в достигается тем, что в оптическом прицеле системы наведения управляемого объекта, содержащем установленные соосно визир и прожектор, включающий в себя два инжекционных лазера - первый и второй, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, оптический сканер, содержащий первую вращающуюся призму на первой оси вращения, а также непрозрачную шторку с оптически прозрачной щелью, установленную на оправу первой вращающейся призмы, и оптронный датчик, снимающий сигнал с этой шторки, формирователь импульсов, вход которого подключен к выходу оптронного датчика, а первый и второй выходы формирователя импульсов подключены к входам первого и второго лазеров соответственно и панкратический объектив, при этом новым является то, что в оптический сканер введена вторая ось вращения, вторая вращающаяся призма, механизм поворота второй оси вращения относительно первой оси вращения и шаговый двигатель, при этом, первая ось вращения является валом шагового двигателя вход управления которого соединен с третьим выходом формирователя импульсов, первая вращающаяся призма установлена между первым лазером и системой вывода излучения лазеров на единую оптическую ось, а вторая вращающаяся призма установлена между вторым лазером и системой вывода излучения лазеров на единую оптическую ось, причем оси вращения этих призм параллельны излучающим областям соответствующих лазеров, суммарный оптический сигнал с выхода системы вывода излучения лазеров на единую оптическую ось поступает на вход панкратического объектива, при этом оси вращения, с помощью механизма поворота развернуты на 90 градусов относительно друг друга.
Решение поставленной задачи в достигается тем, что в оптическом прицеле системы наведения управляемого объекта, содержащем установленные соосно визир и прожектор, включающий в себя два инжекционных лазера - первый и второй, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, оптический сканер содержащий первую вращающуюся призму на первой оси вращения, первую непрозрачную шторку с оптически прозрачной щелью, установленную на оправу первой вращающейся призмы, первый оптронный датчик, снимающий сигнал с этой шторки, и второй оптронный датчик, формирователь импульсов первый и второй входы которого подключены к выходам первого и второго оптронных датчиков, а первый и второй выходы формирователя импульсов подключены к входам первого и второго лазеров соответственно и панкратический объектив, при этом новым является то, что в оптический сканер введены вторая ось вращения, являющаяся валом первого шагового двигателя, вторая вращающаяся призма на второй оси вращения, вторая непрозрачная шторка с оптически прозрачной щелью, установленная на оправу второй вращающейся призмы, сигнал с которой снимается вторым оптронным датчиком, а первая ось вращения является валом второго шагового двигателя, при этом, первая вращающаяся призма установлена между первым лазером и системой вывода излучения лазеров на единую оптическую ось, а вторая между вторым лазером и системой вывода излучения лазеров на единую оптическую ось, причем, оси вращения этих призм параллельны излучающим областям соответствующих лазеров, суммарный оптический сигнал с выхода системы вывода излучения лазеров на единую оптическую ось поступает на вход панкратического объектива, при этом, оси вращения призм развернуты на 90 градусов, а входы управления первым и вторым шаговыми двигателями соединены с третьим и четвертым выходами формирователя импульсов соответственно.
Также и в первом, и во втором варианте исполнения первая и вторая призмы выполнены в виде оптических пластин.
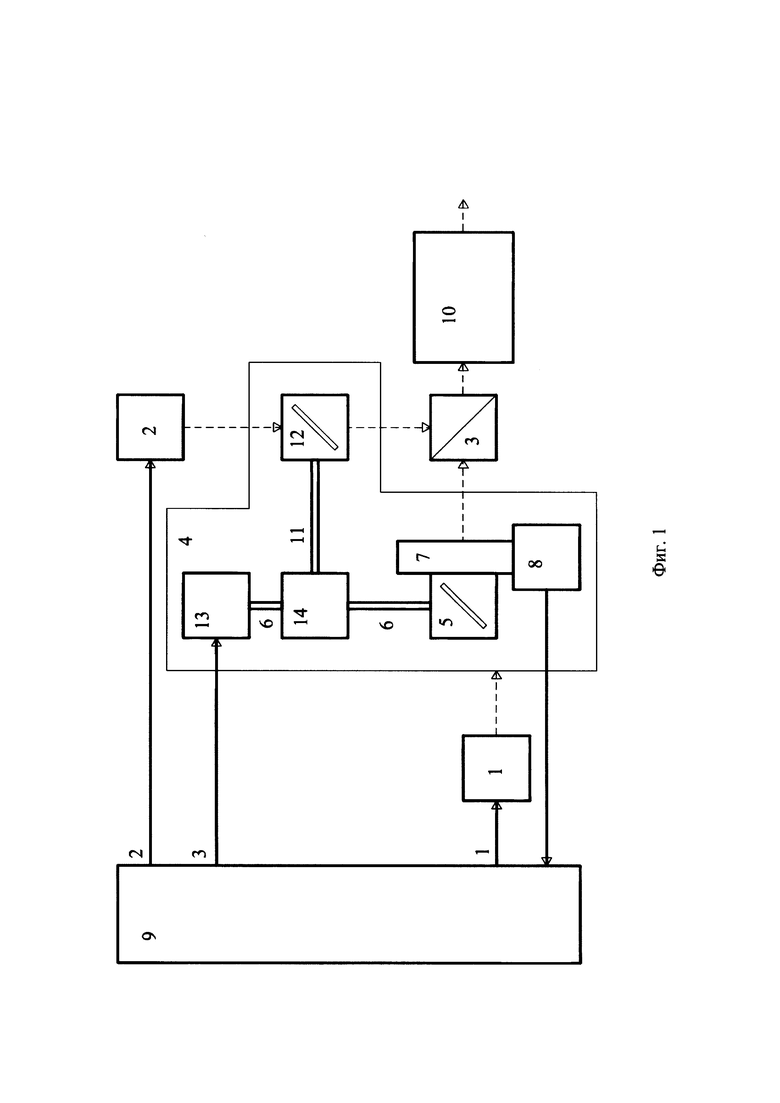
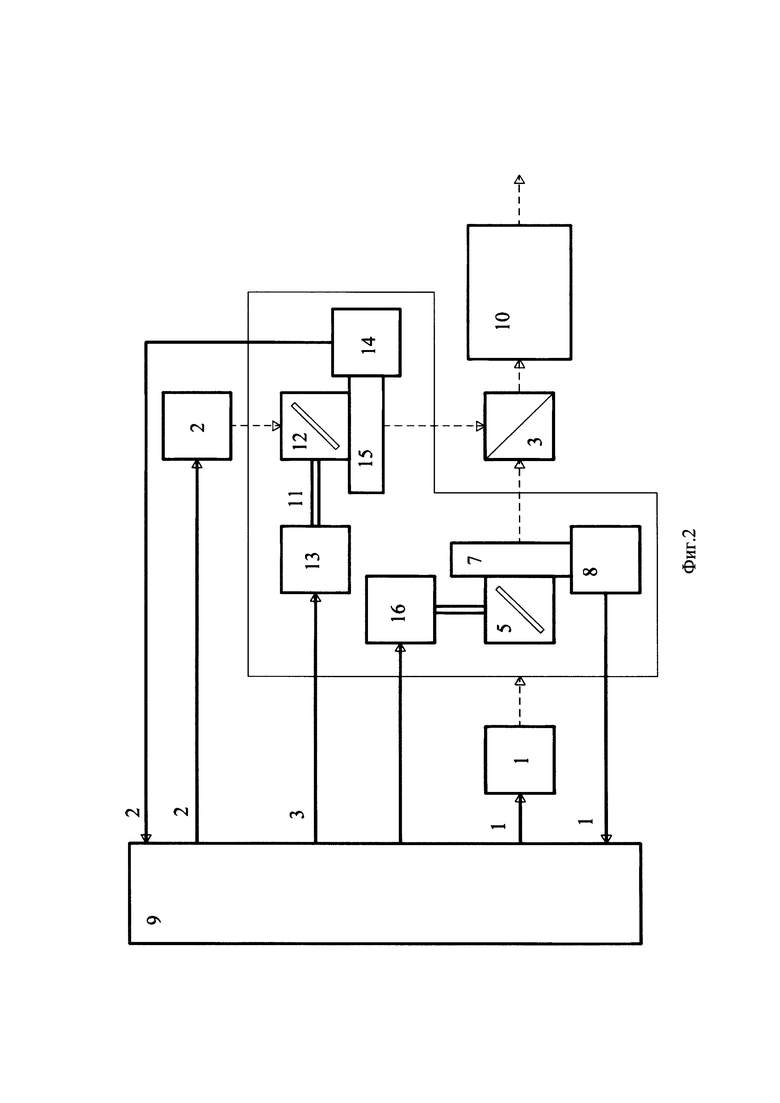
Изобретение поясняется графическими материалами, где на фиг. 1 представлена структурная схема оптического прицела, выполненного по первому варианту, а на фиг. 2 представлена структурная схема оптического прицела, выполненного по второму варианту.
На графических материалах указаны следующие позиции:
1, 2 - первый и второй инжекционные лазеры соответственно,
3 - система вывода излучения на единую оптическую ось,
4 - оптический сканер,
5 - первая призма,
6 - первая ось вращения,
7 - шторка,
8 - оптронный датчик,
9 - формирователь импульсов,
10 - панкратический объектив,
11 - вторая ось вращения,
12 - вторая призма,
13 - шаговый двигатель,
14 - механизм разворота оси вращения.
Устройство, реализованное по первому варианту, работает следующим образом.
С помощью визирного канала производится наведение прицела на цель. Производится непрерывная подача управляющих импульсов на шаговый двигатель 13. При этом, каждый управляющий импульс на шаговый двигатель 13 приводит к повороту первой призмы 5, закрепленной на оси шагового двигателя 13, причем, ось вращения 6 этой призмы совпадает с ориентацией тела свечения первого лазера 1 и, через механизм разворота оси вращения 14, выполненном в виде конического редуктора, к повороту второй призмы 12, ось вращения 11 которой развернута на 90 градусов относительно первой оси вращения 6 и совпадает с ориентацией тела свечения второго лазера 2.
При этом, поворот призм 5 и 12 производится на величину, определяемую величиной шага шагового двигателя 13. Например, при использовании шагового двигателя FL20, работающего в микрошаговом режиме с делением шага на 2 поворот обеих призм составит 0.9 градуса относительно их предыдущего положения на один импульс управления. А при ориентации первой призмы 5 плоскостью параллельно к плоскости свечения первого лазера 1, вторая призма 12 должна быть сориентирована к плоскости излучения второго лазера 2 ребром, т.е. плоскости призм 5 и 12 развернуты относительно друг друга на 90°.
При этом, щель шторки 7, закрепленной на оправе первой призмы 5, должна проходить через оптронный датчик 8, когда плоскость первой призмы 5 составляет 45° относительно излучающей плоскости первого лазера 1. Сигнал с оптронного датчика 8 поступает на первый вход формирователя импульсов. При наличии сигнала с оптронного датчика первая и вторая призмы будут находиться под 45° относительно нормалей к плоскостям соответствующих призм (нулевое положение шагового двигателя). В этот момент времени кодовая посылка с формирователя импульсов 9 подается на первый лазер 1 и он начинает работать на излучение и за счет того что, первая призма 5 находится под углом 45° к падающим лучам лазера происходит отклонение падающего луча на величину равную половине длины тела свечения лазера, и далее, пройдя через систему вывода излучения на единую оптическую ось 3 и через панкратический объектив 10 вся полоска проецируется в крайнее положение области формирования поля управления по одной из координат. В кодовой последовательности присутствует информация о координате и положении полоски в пространстве, в соответствии с углом разворота призмы. С приходом следующего импульса с выхода формирователя импульсов 9 на шаговый двигатель 13 он поворачивает оси вращения, а, следовательно, и призмы на шаг, в нашем случае на 0.9 градуса относительно предыдущего их положения. И первая призма 5 займет положение (45°-Δ), где Δ - угол поворота призмы при одном шаге шагового двигателя 13 (0,9° относительно исходного положения двигателя). При этом, формирователь импульсов 9 формирует кодовую последовательность, соответствующую данному положению луча первого лазера 1 в пространстве, т.к. изменился угол поворота отклоняющей призмы, то изменилась и величина отклонения луча лазера - полоски излучения. В этот момент вторая призма 12 повернется на угол относительно нормали на (45°+Δ), но так как второй лазер 2 погашен, то он не влияет на формирование поля управления. С каждым новым импульсом на шаговый двигатель 13 световая полоса будет занимать следующее пространственное положение в области формируемого поля управления (величина отклонения луча пропорциональна углу поворота призмы) и кодироваться новой кодовой посылкой. Таким образом, количество поданных импульсов на вход шагового двигателя 13 однозначно определяет физическое положение как первой 5, так и второй призм 12.
В момент времени, когда первая призма повернется на угол -45° (90° относительно срабатывания оптронного датчика), что соответствует противоположному краю области формирования поля управления, вторая пластина займет положение +45°. В случае с использованием шагового двигателя с шагом 0,9° это произойдет при повороте вала шагового двигателя на 90° (или через 100 импульсов с выхода формирователя импульсов на шаговый двигатель). С этот момент времени кодовая посылка с выхода формирователя импульсов подается на второй лазер и он начинает работать на излучение и за счет работы призмы, его луч (световая полоса) пройдя через систему вывода излучения на единую оптическую ось и далее через панкратический объектив проецируется в крайнее положение области формирования поля управления по другой координате. С приходом следующего импульса с выхода формирователя импульсов на шаговый двигатель он поворачивает оси вращения, а следовательно, и призмы на шаг, в нашем случае на 0.9 градуса относительно предыдущего их положения. И вторая призма займет положение (-45°+Δ). При этом, формирователь импульсов формирует кодовую последовательность соответствующую данному положению луча второго лазера в пространстве. При этом, первая призма повернется на угол относительно нормали на (-45°-Δ) (90,9° относительно исходного положения), но так как первый лазер погашен, то он не влияет на формирование поля управления. С каждым новым импульсом на шаговый двигатель световая полоса будет занимать следующее пространственное положение в области формируемого поля управления и кодироваться новой кодовой посылкой.
В момент времени, когда вторая призма повернется на угол 45°, что соответствует противоположному краю области формирования поля управления, первая призма займет положение -45°. В нашем случае это произойдет при повороте вала шагового двигателя на 180° (или через 200 импульсов с выхода формирователя импульсов на шаговый двигатель) с момента поступления сигнала с оптронного датчика.
В этот момент времени включается в работу первый лазер. И происходит формирование поля по первой координате как описано выше, но с противоположного конца поля управления, чем в первом случае. Еще через 90° или через 300 импульсов на входе шагового двигателя включается в работу второй лазер, а первый выключается.
В момент прихода сигнала с выхода оптронного датчика процесс формирования поля повторяется как описано выше.
Устройство, реализованное по второму варианту, работает следующим образом.
В начальный момент времени производится непрерывная подача импульсов управления на первый шаговый двигатель. При поступлении сигнала с первого оптронного датчика подача импульсов на первый шаговый двигатель прекращается. Производится непрерывная подача импульсов на второй шаговый двигатель. При поступлении сигнала с выхода второго оптронного датчика подача импульсов с выхода формирователя импульсов прекращается. При этом щели шторок, закрепленных на оправах первой и второй вращающихся призм, должна проходить через оптронный датчик, когда плоскости первой и второй призм составляют 45° относительно излучающих плоскостей соответственно первого и второго лазеров.
Далее на первый и второй шаговые двигатели импульсы управления подаются синхронно и таким образом обеспечивается синхронный поворот обеих призм и способ формирования поля управления полностью совпадает с приведенным выше для первой реализации.
Примером реализации устройства по первому варианту служит прожектор (фиг. 1), содержащий первый 1 и второй 2 инжекционных лазера, например ИЛПИ-132, 3 - систему вывода излучения на единую оптическую ось, например в виде поляризационного кубика, 4 - оптический сканер содержащий первую оптическую призму 5, выполненную в виде оптической пластины, на оправе которой установлена непрозрачная шторка 7 с оптической щелью, первую ось вращения 6, являющуюся валом шагового двигателя 13, например FL20STH, оптронный датчик 8, например типа НОА2001, формирователь импульсов 9 выполненном, например, на микропроцессоре STM32, вторую ось вращения 10, и механизм разворота оси вращения 12, выполненный например в виде конического редуктора.
Примером реализации устройства по второму варианту служит прожектор (фиг. 2), содержащий первый 1 и второй 2 инжекционных лазера, например ИЛПИ-132, 3 - систему вывода излучения на единую оптическую ось, например в виде поляризационного кубика, 4 - оптический сканер, содержащий первую 5 и вторую 14 оптические призмы, выполненные в виде оптических пластин, на оправе которых установлены первая 7 и вторая 15 шторки с оптическими щелями, первую ось вращения 6, являющуюся валом второго шагового 16, например FL20STH, вторую 12 ось вращения являющуюся валом второго шагового двигателя 13, например, FL20STH, первый 8 и второй 9 оптронные датчики, например типа НОА2001, формирователь импульсов 10 выполненном, например на микропроцессоре STM32.
Таким образом, за счет того, что в пространстве поля управления проецируется вся полоса излучения лазеров, существенно повышаются энергетические параметры системы наведения (теоретически до 2 раз), что повышает дальность работы системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2280224C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2257524C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234661C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
Изобретение относится к оптическим системам наведения управляемых объектов. Оптический прицел системы наведения управляемого объекта содержит установленные соосно визир и прожектор, включающий в себя два инжекционных лазера - первый и второй, систему вывода излучения лазеров на единую оптическую ось, оптический сканер, содержащий первую вращающуюся призму на первой оси вращения, а также непрозрачную шторку с оптически прозрачной щелью и оптронный датчик, формирователь импульсов, а также панкратический объектив. В дополнительном варианте оптический прицел системы наведения дополнительно содержит вторые оптронный датчик и непрозрачную шторку с оптически прозрачной щелью. В оптический сканер введена вторая ось вращения, вторая вращающаяся призма, механизм поворота второй оси вращения относительно первой оси вращения и шаговый двигатель. Технический результат – повышение дальности наведения и расширение поля наведения оптического прицела системы наведения. 2 н. и 1 з.п. ф-лы, 2 ил.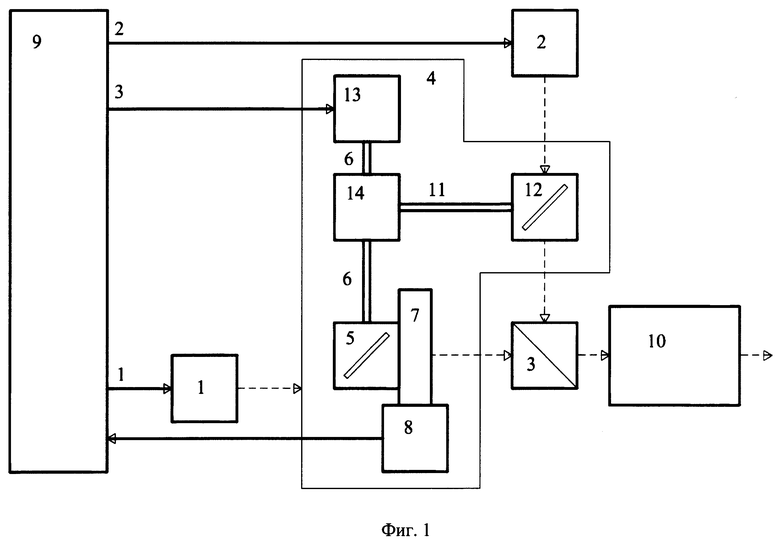
1. Оптической прицел системы наведения управляемого объекта, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера - первый и второй, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, оптический сканер, содержащий первую вращающуюся призму на первой оси вращения, а также непрозрачную шторку с оптически прозрачной щелью, установленную на оправу первой вращающейся призмы, и оптронный датчик, снимающий сигнал с этой шторки, формирователь импульсов, вход которого подключен к выходу оптронного датчика, а первый и второй выходы формирователя импульсов подключены ко входам первого и второго лазеров соответственно и панкратический объектив, отличающийся тем, что в оптический сканер введена вторая ось вращения, вторая вращающаяся призма, механизм поворота второй оси вращения относительно первой оси вращения и шаговый двигатель, при этом первая ось вращения является валом шагового двигателя, вход управления которого соединен с третьим выходом формирователя импульсов, первая вращающаяся призма установлена между первым лазером и системой вывода излучения лазеров на единую оптическую ось, а вторая вращающаяся призма установлена между вторым лазером и системой вывода излучения лазеров на единую оптическую ось, причем оси вращения этих призм параллельны излучающим областям соответствующих лазеров, суммарный оптический сигнал с выхода системы вывода излучения лазеров на единую оптическую ось поступает на вход панкратического объектива, при этом оси вращения с помощью механизма поворота развернуты на 90 градусов относительно друг друга.
2. Оптический прицел системы наведения управляемого объекта, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера - первый и второй, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, оптический сканер, содержащий первую вращающуюся призму на первой оси вращения, первую непрозрачную шторку с оптически прозрачной щелью, установленную на оправу первой вращающейся призмы, первый оптронный датчик, снимающий сигнал с этой шторки, и второй оптронный датчик, формирователь импульсов первый и второй, входы которого подключены к выходам первого и второго оптронных датчиков, а первый и второй выходы формирователя импульсов подключены к входам первого и второго лазеров соответственно и панкратический объектив, отличающийся тем, что в оптический сканер введены вторая ось вращения, являющаяся валом первого шагового двигателя, вторая вращающаяся призма на второй оси вращения, вторая непрозрачная шторка с оптически прозрачной щелью, установленная на оправу второй вращающейся призмы, сигнал с которой снимается вторым оптронным датчиком, а первая ось вращения является валом второго шагового двигателя, при этом первая вращающаяся призма установлена между первым лазером и системой вывода излучения лазеров на единую оптическую ось, а вторая между вторым лазером и системой вывода излучения лазеров на единую оптическую ось, причем оси вращения этих призм параллельны излучающим областям соответствующих лазеров, суммарный оптический сигнал с выхода системы вывода излучения лазеров на единую оптическую ось поступает на вход панкратического объектива, при этом оси вращения призм развернуты на 90 градусов, а входы управления первым и вторым шаговыми двигателями соединены с третьим и четвертым выходами формирователя импульсов соответственно.
3. Оптический прицел системы наведения управляемого объекта, выполненный по пп. 1, 2, отличающийся тем, что первая и вторая призмы выполнены в виде оптических пластин.
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
| Прицел-прибор наведения | 2021 |
|
RU2767845C1 |
| Способ повышения чувствительности эмульсии ферропруссиатной бумаги, улучшения ее тона и сохраняемости | 1932 |
|
SU33809A1 |
| КОМБИНИРОВАННЫЙ ПРИЦЕЛ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2006 |
|
RU2313116C1 |
| US 4243187 A1, 06.01.1981. | |||

