Изобретение относится к способу компенсации ошибок сдвига нуля Кориолисова гироскопа.
Кориолисовы гироскопы (также называемые вибрационными гироскопами) все шире используются в навигации. Кориолисовы гироскопы имеют в своем составе систему масс, находящуюся в состоянии вынужденных колебаний. Это колебательное движение, как правило, является суперпозицией большого числа отдельных колебаний. Последние в исходном состоянии являются независимыми друг от друга и каждый может быть абстрактно определен как «резонатор». Для функционирования вибрационного гироскопа требуется по меньшей мере два резонатора: колебания одного из них (первого) являются вынужденными, что далее по тексту называется «возбужденные колебания». Колебания другого резонатора (второго) возбуждаются только тогда, когда вибрационный гироскоп перемещается и/или вращается. Происходит это потому, что в этом случае появляются Кориолисовы силы, которые связывают первый и второй резонатор, поглощают энергию вынужденных колебаний первого резонатора и передают ее считываемым колебаниям второго резонатора. Колебания второго резонатора далее в тексте называются «считываемыми колебаниями». Для того чтобы определить параметры движения (в частности, вращения) Кориолисова гироскопа считываемые колебания передают в виде соответствующего сигнала чтения, который, в свою очередь, анализируют на наличие изменений в амплитуде, которая пропорциональна скорости вращения Кориолисова гироскопа. Кориолисовы гироскопы могут быть выполнены как системы без обратной связи и системы с обратной связью. В системе с обратной связью амплитуда считываемых колебаний постоянно установлена в фиксированное значение - предпочтительно нулевое - через соответствующую цепь управления.
Источник DE-A-10049462 раскрывает способ и устройство для электронной компенсации ошибки сдвига нуля микромеханического датчика путем приложения электрического потенциала. Способы тестирования датчика угловой скорости раскрыты в патентах DE-A-4447005, DE-A-10131760 и DE-A-19845185.
Далее приведено описание одного из примеров реализации Кориолисова гироскопа, выполненного в виде системы с обратной связью, со ссылкой на фигуру 2, для более подробной иллюстрации работы Кориолисова гироскопа.
Кориолисов гироскоп 1, например, описанный здесь, имеет систему масс 2, которая может быть приведена в состояние вынужденных колебаний и которая далее называется «резонатором». Следует различать данный резонатор и «абстрактные» резонаторы, упоминавшиеся выше, которые представляют собой индивидуальные колебания «реального» резонатора. Как указывалось ранее, резонатор 2 можно рассматривать как совокупность двух «резонаторов», первого резонатора 3 и второго резонатора 4. Каждый из резонаторов 3, 4 связан с датчиком силы (не показан) и со считывающей системой (не показана). Шум, который генерируется датчиком силы и считывающей системой, схематично обозначен здесь как Noisel (позиция 5) и Noise2 (позиция 6).
Далее, Кориолисов гироскоп имеет четыре контура управления.
Первый контур управления используют для управления возбужденными колебаниями (то есть частотой первого резонатора 3) таким образом, чтобы поддерживать постоянную частоту колебаний (резонансную частоту). Первый контур управления содержит первый демодулятор 7, первый фильтр 8 низких частот, регулятор 9 частоты, генератор 10, управляемый напряжением, далее ГУН (VCO), и первый модулятор 11.
Второй контур управления предназначен для обеспечения постоянной амплитуды возбужденных колебаний и содержит второй демодулятор 12, второй фильтр 13 низких частот и регулятор 14 амплитуды.
Третий и четвертый контуры управления предназначены для удержания нулевых значений сил, стимулирующих считывающие колебания. Третий контур управления содержит третий демодулятор 15, третий фильтр 16 низких частот, квадратурный регулятор 17 и третий модулятор 22. Четвертый контур управления содержит четвертый демодулятор 19, четвертый фильтр 20 низких частот, регулятор 21 частоты вращения и второй модулятор 18.
Колебания первого резонатора 3 стимулируют на его резонансной частоте ω1. Результирующие возбужденные колебания считывают, демодулируют по фазе с помощью первого демодулятора 7, а демодулированный сигнал подают на первый фильтр низких частот 8, который удаляет из него комбинационные частоты. Считанный сигнал далее по тексту называется «считанный сигнал возбужденных колебаний». Выходной сигнал первого фильтра 8 низких частот передают на регулятор 9 частоты, который, в свою очередь, управляет генератором 10, управляемым напряжением (далее по тексту ГУН), как функция сигнала, поданного на него таким образом, что синфазная компонента стремится к нулю. Для этого ГУН 10 передает сигнал на первый модулятор 11, который управляет датчиком силы таким образом, что возбуждающая сила прикладывается к первому резонатору 3. Если синфазная компонента равна нулю, первый резонатор 3 колеблется на своей резонансной частоте ω1. Следует упомянуть, что все модуляторы и демодуляторы работают на частоте ω1.
Считанный сигнал возбужденных колебаний также поступает во второй контур управления и демодулируется вторым демодулятором 12, выход которого подается на второй фильтр 13 низких частот, выход которого, в свою очередь, подается на регулятор 14 амплитуды. Регулятор 14 амплитуды управляет первым модулятором 11 как функция этого сигнала и датчика 23 номинальной амплитуды таким образом, что первый резонатор 3 возбуждается с постоянной амплитудой (то есть возбужденные колебания имеют постоянную амплитуду).
Как уже было показано, Кориолисовы силы, обозначенные на фигуре 2 формулой FC·cos(ω1·t), появляются при движении/вращении Кориолисова гироскопа 1 и связывают первый резонатор 3 со вторым резонатором 4 и тем самым вынуждают второй резонатор колебаться. Считываемые колебания имеют частоту ω2, а соответствующий выходной сигнал считываемых колебаний (сигнал чтения) передается на третий и четвертый контур управления. В третьем контуре управления этот сигнал демодулируют третьим демодулятором 15, комбинационные частоты подавляют третьим фильтром 16 низких частот, откуда сигнал передают на квадратурный регулятор 17, выходной сигнал которого подают на третий модулятор 22 для обнуления квадратурных компонент считывающих колебаний. Аналогично, в четвертом контуре управления выходной сигнал считывающих колебаний демодулируют четвертым демодулятором 19, подают через четвертый фильтр 20 низких частот и направляют на регулятор 21 скорости вращения, выходной сигнал с которого, пропорциональный мгновенной скорости вращения, поступает как результат измерения скорости вращения на выход 24 скорости вращения и, с другой стороны, на второй модулятор 18, который сводит к нулю соответствующие компоненты скорости вращения в считываемых колебаниях.
Кориолисов гироскоп, описанный выше, может работать в режиме двойного резонанса или вне его. Если Кориолисов гироскоп работает в режиме двойного резонанса, тогда частота считываемых колебаний ω2 приблизительно равна частоте возбуждающих колебаний ω1, тогда как вне режима двойного резонанса частота ω2 считывающих колебаний отличается от частоты ω1 возбуждающих колебаний. В случае двойного резонанса информацию о скорости вращения содержит выходной сигнал четвертого фильтра 20 низких частот, в то время как вне режима двойного резонанса информацию о скорости вращения содержит выходной сигнал третьего фильтра 16 низких частот. Для того чтобы обеспечить переключение между режимами двойного резонанса, устанавливают сдвоенный переключатель 25, который последовательно подключает выходы третьего 16 и четвертого 20 фильтров низких частот к регулятору 21 частоты вращения и квадратурному регулятору 17.
Система 2 масс (резонатор), как правило, имеет два или более собственных резонанса, то есть могут возбуждаться различные собственные колебания системы 2 масс. Одно из таких собственных колебаний является вынужденным колебанием. Другие собственные колебания представляют собой считываемые колебания, которые возникают за счет Кориолисовых сил в процессе вращения Кориолисова гироскопа. Вследствие механического устройства резонатора и неизбежного разброса параметров в процессе изготовления не представляется возможным предотвратить другие собственные колебания системы 2 масс, в некоторых случаях происходящие на частоте, удаленной от резонансной частоты, и возбуждаемые в дополнение к вынужденным колебаниям и считываемым колебаниям. Тем не менее, нежелательные собственные колебания приводят к изменению считываемого выходного сигнала колебаний, так как эти собственные колебания также по меньшей мере частично считываются устройством (tap) вывода сигнала. Соответственно, считываемый выходной сигнал колебаний содержит долю колебаний, вызванную Кориолисовыми силами, и долю колебаний, возникающую в результате нежелательного возбуждения резонансов. Нежелательная доля колебаний приводит к возникновению в Кориолисовых гироскопах ошибки сдвига нуля, величина которой неизвестна, и в этом случае невозможно провести различие между этими двумя долями при выводе считываемого выходного сигнала.
Задача настоящего изобретения заключается в создании способа, позволяющего установить влияние колебаний «третьих» режимов, описанных выше, и таким образом определить ошибку сдвига нуля.
Поставленная задача решена посредством способа, заявленного в первом пункте формулы изобретения. Согласно изобретению также предложен Кориолисовый гироскоп, заявленный в пункте 7 формулы изобретения.
Полезные улучшения и усовершенствования идеи изобретения изложены в соответствующих зависимых пунктах формулы изобретения.
Согласно изобретению способ определения ошибки сдвига нуля Кориолисова гироскопа состоит в том, что к резонатору Кориолисова гироскопа прикладывают соответствующие возмущающие силы таким образом, чтобы возбуждить по меньшей мере одно собственное колебание резонатора, которое отличается от вынужденных колебаний и от считываемых колебаний резонатора, при этом изменение в считываемом сигнале, который представляет собой считываемые колебания, возникающие в результате возбуждения по меньшей мере одного собственного колебания, определяют как меру ошибки сдвига нуля.
В рассматриваемом случае слово «резонатор» обозначает общую систему масс Кориолисова гироскопа, которую приводят к вынужденным колебаниям, то есть в соответствии с фигурой 2 часть Кориолисова гироскопа, обозначенную позицией 2.
В основу создания настоящего изобретения были положены исследования, в ходе которых искусственно возбуждали нежелательные собственные колебания резонатора (то есть собственные колебания, не являющиеся ни вынужденными колебаниями, ни считываемыми колебаниями) и наблюдали их воздействие на считываемый выходной сигнал. Нежелательные собственные колебания в этом случае вызывали путем приложения соответствующих возмущающих сил к резонатору. «Интенсивность (strength) проникновения» таких возмущений в считываемый выходной сигнал представляет собой меру ошибки сдвига нуля Кориолисового гироскопа. Таким образом, если определить интенсивность проникновения возмущающей составляющей в считываемый выходной сигнал и сравнить с интенсивностью возмущающих сил, создающих возмущающую составляющую, то можно исходя из этого получить ошибку сдвига нуля.
Предпочтительно, производят искусственное стимулирование собственных колебаний, а также установливают «проникновение» собственных колебаний в считываемый выходной сигнал в процессе функционирования Кориолисова гироскопа. Однако ошибку сдвига нуля также можно установить при отсутствии каких-либо стимулирующих колебаний.
Предпочтительно, возмущающие силы являются переменными силами при соответствующих возмущающих частотах, например в результате наложения синусоидальной и косинусоидальной сил. В этом случае возмущающие частоты преимущественно или в значительной степени равны частотам собственных колебаний резонатора. Изменения в считываемом сигнале (возмущающую составляющую) можно регистрировать посредством демодуляции считываемого сигнала на возмущающих частотах.
Предпочтительно, определяют вклад ошибки сдвига нуля, возникающей в результате, по меньшей мере, одного собственного колебания (то есть в результате одного из «третьих» режимов), путем определения интенсивности соответствующего изменения в считываемом сигнале, определения соответствующего резонансного фактора Q собственных колебаний и расчета определенной таким образом интенсивности и резонансного фактора. Резонансный фактор Q собственных колебаний предпочтительно определяют путем расстройки соответствующей возмущающей частоты с одновременным измерением вызванных этой расстройкой изменений в считываемом сигнале.
Для исследования воздействия нежелательных собственных колебаний на считываемые выходные сигналы можно одновременно возбудить два или более собственных колебания и зарегистрировать их «общее» влияние на считываемые выходные сигналы. Однако все возбужденные собственные колебания предпочтительно возбуждают по отдельности, с тем чтобы наблюдать их соответствующее влияние на считываемые выходные сигналы в отдельности. Вклады ошибок сдвига нуля, полученные таким образом от отдельных собственных колебаний, затем можно суммировать для определения «суммарной ошибки сдвига нуля» (называемой здесь «ошибкой сдвига нуля»), вызываемой собственными колебаниями.
Возмущающая составляющая может быть определена непосредственно из считываемого выходного сигнала.
Согласно настоящему изобретению также предложен Кориолисовый гироскоп, отличающийся тем, что он содержит устройство определения ошибки сдвига нуля Кориолисова гироскопа. Устройство содержит:
- блок возмущения, посредством которого к резонатору Кориолисова гироскопа прикладывают соответствующую возмущающую силу, такую что при этом происходит возбуждение, по меньшей мере, одного собственного колебания резонатора, которое отличается от вынужденных колебаний и считываемого выходного сигнала резонатора, и
- блок приема сигнала возмущения, определяющий возмущающую составляющую, которая содержится в считываемом сигнале, представляющую собой считываемые колебания, и генерируется путем возбуждения по меньшей мере одного собственного колебания, как меру ошибки сдвига нуля.
Если возмущающие силы вызваны переменными силами при некоторых возмущающих частотах, то блок приема сигнала возмущения содержит блок демодуляции, посредством которого считываемый сигнал подвергают процессу демодуляции (синхронная демодуляция при возмущающих частотах). Таким образом, возмущающую составляющую выделяют из считываемого сигнала.
Блок приема сигнала возмущения предпочтительно содержит два демодулятора, которые функционируют с квадратурой относительно друг друга, два фильтра низких частот и блок управления и вычисления, на демодуляторы поступает считываемый выходной сигнал, выходные сигналы от двух демодуляторов в каждом случае проходят через фильтры низких частот, выходные сигналы от фильтров низких частот поступают в блок управления и вычисления, который исходя из этого сигнала определяет ошибку сдвига нуля.
Блок управления и вычисления функционирует в соответствии с блоком возмущения исходя из сигналов, поступающих на него, посредством чего блок управления и вычисления может управлять частотами сил возмущения.
Как интенсивность возмущающей составляющей в считываемом сигнале, так и резонансный фактор Q соответствующих собственных колебаний должен быть определен с целью определения ошибки сдвига нуля. Затем эти величины рассчитывают с целью нахождения ошибки сдвига нуля. Для определения резонансного фактора Q в момент проведения измерения посредством блока приема сигнала частоты блока возмущения расстривают относительно резонансной частоты. Предпочтительно это достигают посредством программного обеспечения, при реализации функций которого происходит выполнение следующих операций:
- поиск «значительного» третьего (возмущающего) собственного резонанса;
- удаление от сооответствующей резонансной кривой;
- вычисление фактора Q, интенсивности возбуждения и «различимости» этого третьего колебания в канале считывания;
- вычисление вклада этого третьего колебания в сдвиг на основе фактора Q, интенсивности и «различимости».
Сдвиг может быть компенсирован при вычислении посредством программного обеспечения.
В последующем описании изобретение рассмотрено более подробно на примере реализации со ссылками на сопровождающие чертежи, где:
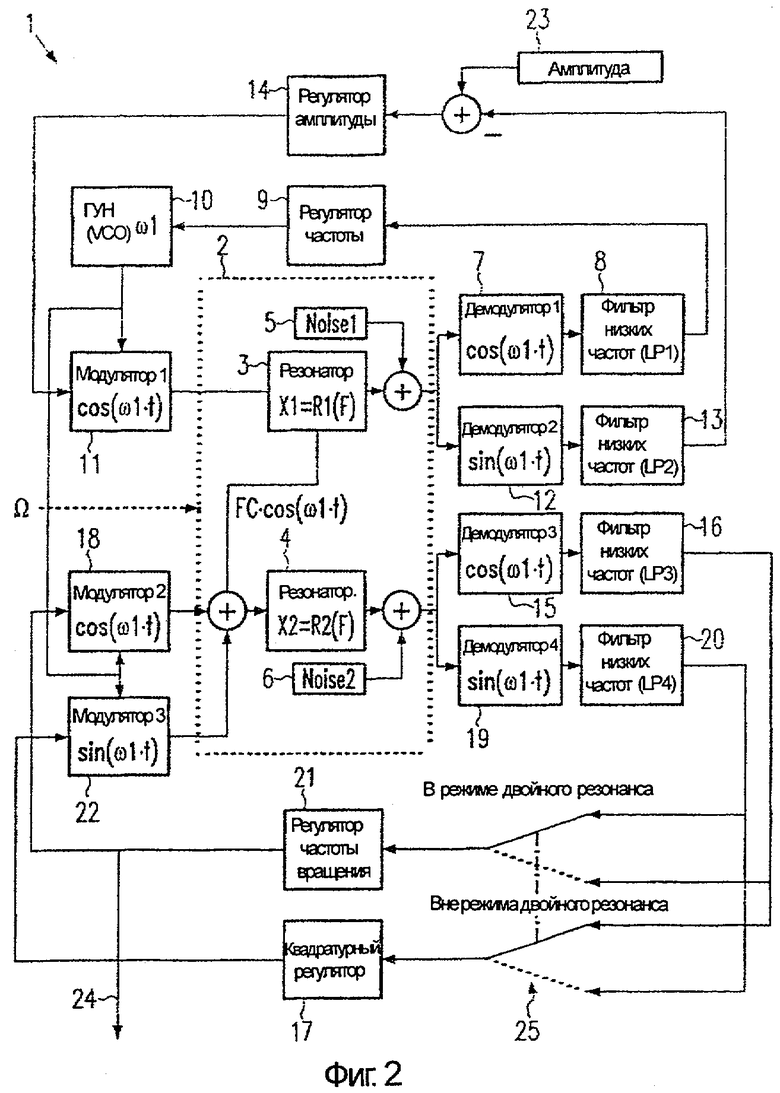
на Фигуре 1 представлен схематический чертеж Кориолисова гироскопа, выполненого на основе способа согласно настоящему изобретению;
на Фигуре 2 представлен схематический чертеж традиционного Кориолисова гироскопа.
Части и устройства, соответствующие частям и устройствам на фигуре 2, обозначены одинаковыми символами и повторно не поясняются. Способ согласно изобретению пояснен в настоящем описании более подробно с использованием примеров реализации изобретения со ссылкой на фигуру 1.
Согласно изобретению возвратный Кориолисовый гироскоп дополнительно снабжен блоком 26 управления и вычисления, модулятором 27 (блок возмущения), характеризущимся переменной частотой ωmod и предпочтительно регулируемой амплитудой, двумя демодуляторами 28, 29, которые функционируют с квадратурой на частоте ωmod, а также пятым и шестым фильтрами 30, 31. Блок возмущения 27 генерирует переменный сигнал на частоте ωmod, который подают на вход побудителя колебаний (первого резонатора 3). Кроме того, этот сигнал в качестве опорного сигнала подают на модуляторы 28, 29. Переменная сила, которая соответствует переменному сигналу, таким образом, дополнительно поступает на резонатор 2. Эта переменная сила возбуждает дальнейшие собственные колебания (также называемые «третьим» собственным режимом) резонатора 2 дополнительно к вынужденным колебаниям, действие которых проявляется в виде возмущающей составляющей в считываемом выходном сигнале. В этом примере считываемый выходной сигнал подвергают демодуляции с фазой и квадратурой по отношению к возбуждению, вызываемому модулятором 27, при этом процесс демодуляции осуществляют демодуляторами 28, 29 при частоте ωmod (возмущающая частота). Полученный таким образом сигнал пропускают через фильтры низких частот (через пятый 30 и шестой 31 фильтры низких частот) и подают на блок 26 управления и вычисления. Этот блок 26 управления и вычисления управляет частотой ωmod и, если это необходимо, амплитудой возбуждения переменного сигнала, генерируемого модулятором 27, таким образом, что происходит непрерывное определение частоты и интенсивности «значительных» третьих собственных режимов, так же как и их факторов Q. Блок 26 управления и вычисления использует это для вычисления соответствующей мгновенной ошибки сдвига нуля и предоставляет ее для коррекции ошибки сдвига нуля гироскопа.
Изобретение относится к способу компенсации ошибок сдвига нуля Кориолисова гироскопа (1'), в котором к резонатору (2) прикладывают соответствующие возмущающие силы таким образом, что возбуждается, по меньшей мере, одно собственное колебание резонатора (2), которое отличается от вынужденного колебания и от считываемого колебания резонатора (2). Изменение в считываемом сигнале, которое представляет собой считываемые колебания и возникает в результате возбуждения, по меньшей мере, одного собственного колебания, определяют как меру ошибки сдвига нуля, что позволяет повысить точность гироскопа. 2 с. и 7 з.п. ф-лы, 2 ил.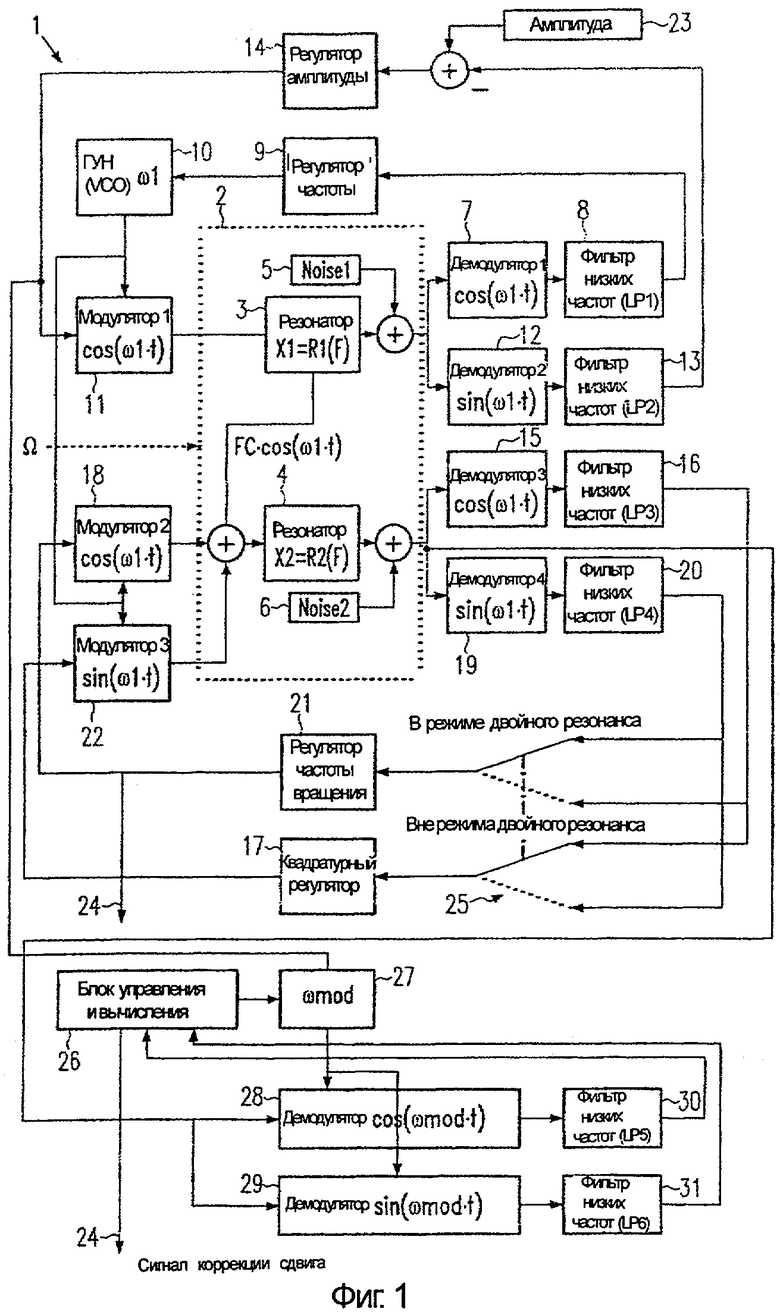
блок (27) возмущения, посредством которого соответствующие возмущающие силы в виде переменного сигнала прикладывают к резонатору (2) кориолисова гироскопа (1') таким образом, что при этом происходит возбуждение по меньшей мере одного собственного колебания резонатора (2), которое отличается от вынужденного колебания и считываемого колебания резонатора (2), и
блок приема сигнала возмущения (26, 28, 29, 30, 31), определяющий возмущающую составляющую, которая содержится в считываемом сигнале, представляющем собой считываемые колебания и генерируемом путем возбуждения, по меньшей мере, одного собственного колебания, причем указанная возмущающая составляющая является мерой ошибки сдвига нуля, при этом блок (27) возмущения содержит модулятор (27), а блок приема сигнала возмущения (26, 28, 29, 30, 31) включает блок демодуляции (28, 29), причем в указанный блок демодуляции (28, 29) подают указанный переменный сигнал от модулятора (27) в качестве опорного сигнала, а также указанный считываемый выходной сигнал от резонатора (2), который подвергают процессу демодуляции по отношению к возбуждению, вызываемому модулятором (27), и таким образом выделяют возмущающую составляющую из считываемого сигнала.
| DE 10049462 A1, 11.04.2002 | |||
| DE 4447005 A1, 20.04.2000 | |||
| DE 10131760 A1, 16.01.2003 | |||
| DE 19845185 A1, 20.04.2004 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |

