Изобретение относится к способам компенсации ошибок сдвига нуля Кориолисова гироскопа.
Кориолисовы гироскопы (также называемые вибрационными гироскопами) все шире используются в навигации. Кориолисовы гироскопы имеют в своем составе систему масс, находящуюся в состоянии вынужденных колебаний. Это колебательное движение, как правило, является суперпозицией большого числа отдельных колебаний. Последние в исходном состоянии являются независимыми друг от друга и каждый может быть абстрактно определен как «резонатор». Для функционирования вибрационного гироскопа требуется по меньшей мере два резонатора: колебания одного из них (первого) являются вынужденными, что далее по тексту называется «колебания возбуждения». Колебания другого резонатора (второго) возбуждаются только тогда, когда вибрационный гироскоп перемещается и/или вращается. Происходит это потому, что в этом случае появляются Кориолисовы силы, которые связывают первый и второй резонатор, поглощают энергию вынужденных колебаний первого резонатора и передают ее считываемым колебаниям второго резонатора. Колебания второго резонатора далее в тексте называются «считываемыми колебаниями». Для того чтобы определить параметры движения (в частности, вращения) Кориолисова гироскопа, считываемые колебания передают в виде соответствующего сигнала чтения, который, в свою очередь, анализируют на наличие изменений в амплитуде, которая пропорциональна скорости вращения Кориолисова гироскопа. Кориолисовы гироскопы могут быть выполнены как системы без обратной связи и системы с обратной связью. В системе с обратной связью амплитуда считываемых колебаний постоянно установлена в фиксированное значение - предпочтительно нулевое - через соответствующую цепь управления.
Рассматриваемые Кориолисовы гироскопы раскрыты, например, в качестве датчиков угловой скорости в патенте US 5,908,986 или в качестве датчика колебательной скорости вращения в WO 01/14831 А1. Способ регулирования контура управления скоростью вращения раскрыт, например, в DE 10062347.
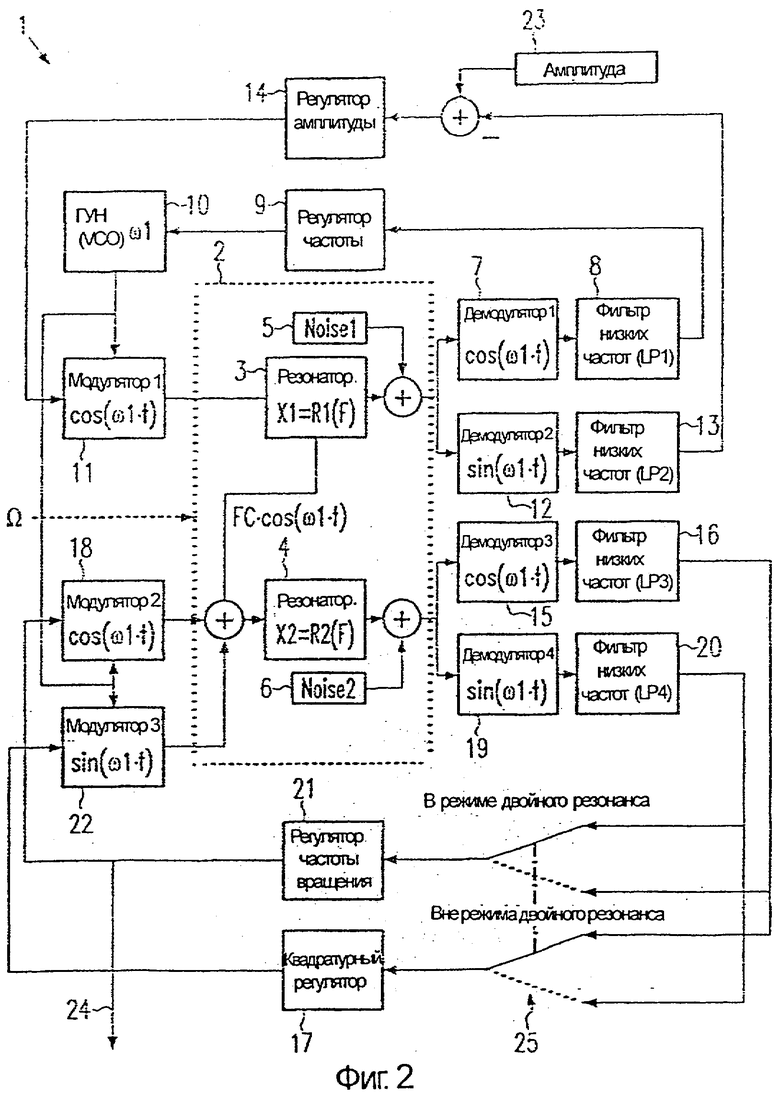
Далее приведено описание одного из примеров реализации Кориолисова гироскопа, выполненного в виде системы с обратной связью, со ссылкой на фигуру 2, для более подробной иллюстрации работы Кориолисова гироскопа.
Кориолисов гироскоп 1, например, описанный здесь, имеет систему масс 2, которая может быть приведена в состояние вынужденных колебаний и которая далее называется «резонатором». Следует различать данный резонатор и «абстрактные» резонаторы, упоминавшиеся выше, которые представляют собой индивидуальные колебания «реального» резонатора. Как указывалось ранее, резонатор 2 можно рассматривать как совокупность двух «резонаторов» - первого резонатора 3 и второго резонатора 4. Каждый из резонаторов 3, 4 связан с датчиком силы (не показан) и со считывающей системой (не показана). Шум, который генерируется датчиком силы и считывающей системой, схематично обозначен здесь как Noise1 (позиция 5) и Noise2 (позиция 6).
Далее Кориолисов гироскоп имеет четыре контура управления.
Первый контур управления используют для управления колебаниями возбуждения (то есть частотой первого резонатора 3) таким образом, чтобы поддерживать постоянную частоту колебаний (резонансную частоту). Первый контур управления содержит первый демодулятор 7, первый фильтр 8 низких частот, регулятор 9 частоты, генератор 10, управляемый напряжением, далее ГУН (VCO), и первый модулятор 11.
Второй контур управления предназначен для обеспечения постоянной амплитуды колебаний возбуждения и содержит второй демодулятор 12, второй фильтр 13 низких частот и регулятор 14 амплитуды.
Третий и четвертый контуры управления предназначены для удержания нулевых значений сил, стимулирующих считываемые колебания. Третий контур управления содержит третий демодулятор 15, третий фильтр 16 низких частот, квадратурный регулятор 17 и третий модулятор 22. Четвертый контур управления содержит четвертый демодулятор 19, четвертый фильтр 20 низких частот, регулятор 21 частоты вращения и второй модулятор 18.
Колебания первого резонатора 3 стимулируют на его резонансной частоте ω1. Результирующие колебания возбуждения считывают, демодулируют по фазе с помощью первого демодулятора 7, а демодулированный сигнал подают на первый фильтр низких частот 8, который удаляет из него комбинационные частоты. Считанный сигнал далее по тексту называется «считанным сигналом колебаний возбуждения». Выходной сигнал из первого фильтра 8 низких частот поступает на регулятор 9 частоты, который, в свою очередь, управляет ГУН 10, как функция сигнала, поданного на него, таким образом, что синфазная компонента стремится к нулю. Для этого ГУН 10 передает сигнал на первый модулятор 11, который управляет датчиком силы таким образом, что возбуждающая сила прикладывается к первому резонатору 3. Если синфазная компонента равна нулю, первый резонатор 3 колеблется на своей резонансной частоте ω1. Следует упомянуть, что все модуляторы и демодуляторы работают на частоте ω1.
Считанный сигнал колебаний возбуждения также подают во второй контур управления и демодулируют вторым демодулятором 12, выход которого подают на второй фильтр 13 низких частот, выход которого, в свою очередь, подают на регулятор 14 амплитуды. Регулятор 14 амплитуды управляет первым модулятором 11 как функция этого сигнала и датчика 23 номинальной амплитуды таким образом, что первый резонатор 3 возбуждается с постоянной амплитудой (то есть колебания возбуждения имеют постоянную амплитуду).
Как уже указывалось, Кориолисовы силы, обозначенные на фигуре формулой FC·cos(ω1·t), появляются при движении/вращении Кориолисова гироскопа 1 и связывают первый резонатор 3 со вторым резонатором 4 и тем самым вынуждают второй резонатор колебаться. Считываемые колебания имеют частоту ω2, а соответствующий выходной сигнал считываемых колебаний (сигнал чтения) подают на третий и четвертый контур управления. В третьем контуре управления этот сигнал демодулируют третьим демодулятором 15, комбинационные частоты подавляют третьим фильтром 16 низких частот, откуда сигнал подают на квадратурный регулятор 17, выходной сигнал которого подают на третий модулятор 22 для обнуления квадратурных компонент считываемых колебаний. Аналогично в четвертом контуре управления выходной сигнал считываемых колебаний демодулируют четвертым демодулятором 19, подают через четвертый фильтр 20 низких частот и направляют на регулятор 21 скорости вращения, выходной сигнал с которого, пропорциональный мгновенной скорости вращения, поступает как результат измерения скорости вращения на выход 24 скорости вращения, и с другой стороны, на второй модулятор 18, который сводит к нулю соответствующие компоненты скорости вращения в считываемых колебаниях.
Кориолисов гироскоп, описанный выше, может работать в режиме двойного резонанса или вне его. Если Кориолисов гироскоп работает в режиме двойного резонанса, тогда частота считываемых колебаний ω2 приблизительно равна частоте колебаний возбуждения ω1, тогда как вне режима двойного резонанса частота ω2 считываемых колебаний отличается от частоты ω1 колебаний возбуждения. В случае двойного резонанса информацию о скорости вращения содержит выходной сигнал четвертого фильтра 20 низких частот, в то время как вне режима двойного резонанса информацию о скорости вращения содержит выходной сигнал третьего фильтра 16 низких частот. Для того чтобы обеспечить переключение между режимами двойного резонанса, устанавливают сдвоенный переключатель 25, который последовательно подключает выходы третьего 16 и четвертого 20 фильтров низких частот к регулятору 21 частоты вращения и квадратурному регулятору 17.
Вследствие неизбежного разброса параметров при производстве необходимо учитывать небольшие рассогласования между возбуждающими силами, удерживающими силами, датчиками сил и считывателями, и действительными колебаниями резонатора 2 (то есть между реальным возбуждающим и считанным сигналами с резонатора 2). Это означает, что выходной сигнал чтения содержит ошибки. В рассматриваемой ситуации выходной сигнал чтения таким образом состоит из части, которая происходит от реальных считываемых колебаний, и из части, которая происходит от реальных колебаний возбуждения. Нежелательная часть порождает ошибку Кориолисова гироскопа, величина которой, однако, неизвестна, так как невозможно различить указанные две части, когда передается выходной сигнал чтения.
Задачей настоящего изобретения является создание способа, позволяющего определить ошибку сдвига нуля, описанную выше.
Поставленная задача решена посредством способа, заявленного в первом пункте формулы изобретения. Согласно изобретению также предложен Кориолисов гироскоп, заявленный в п.6 формулы изобретения. Полезные улучшения и усовершенствования идеи изобретения могут быть изложены в соответствующих зависимых пунктах формулы изобретения.
Согласно изобретению способ определения ошибки ухода нуля Кориолисова гироскопа состоит в том, что модулируют частоту (предпочтительно резонансную частоту) считываемых колебаний, выходной сигнал контура управления частотой вращения или контура квадратурного управления Кориолисова гироскопа демодулируют синхронно с модуляцией частоты (резонансной частоты) считываемых колебаний, с тем, чтобы получить дополнительный сигнал, который является мерой ошибки нуля. Далее генерируют сигнал компенсации и подают на вход контура управления частотой вращения или контура квадратурного управления, причем компенсационный сигнал выбирают таким, чтобы амплитуда дополнительного сигнала была минимальной.
В рассматриваемом случае слово «резонатор» обозначает общую систему масс Кориолисова гироскопа, которая приводится к вынужденным колебаниям, то есть, в соответствии с фигурой 2, часть Кориолисова гироскопа, обозначенную позицией 2.
В процессе создания настоящего изобретения было обнаружено, что выходной сигнал контура управления частотой вращения / контура квадратурного управления изменяется в результате изменения частоты считываемых колебаний только в том случае, если имеется соответствующая ошибка смещения нуля, иными словами, когда существует рассогласование между возбуждающими силами / удерживающими силами / датчиками силы / индикаторами и реальными колебаниями резонатора. Таким образом, если компенсационный сигнал, компенсирующий ошибку смещения нуля в выходном сигнале считывания, вызванную рассогласованиями, передается на вход контура управления частотой вращения / контура квадратурного управления или непосредственно в выходной сигнал считывания, тогда выходной сигнал контура управления частотой вращения / контура квадратурного управления более не будет изменяться в случае изменения частоты (в частности, изменения резонансной частоты) считываемых колебаний. Так как изменения выходного сигнала под воздействием контура управления частотой вращения / контура квадратурного управления проявляются в дополнительном сигнале, ошибка смещения нуля может быть определена и скомпенсирована следующим образом: компенсационный сигнал вырабатывается таким образом, что дополнительный сигнал (и тем самым изменения выходного сигнала под воздействием управляющего контура) имеет минимально возможное значение.
Частоту (резонансную частоту) считываемых колебаний предпочтительно модулируют величиной с нулевым средним значением, например частотой 55 Гц.
Дополнительный сигнал предпочтительно пропускают через фильтр низких частот, и компенсационный сигнал формируют на базе выходного сигнала этого фильтра. Компенсационный сигнал может вырабатываться, например, умножением управляемого сигнала, который производится из дополнительного сигнала, на сигнал от амплитудного регулятора, который управляет амплитудой колебаний возбуждения. Предпочтительно дополнительный сигнал формируют из выходного сигнала контура квадратурного управления, а компенсационный сигнал подают на вход контура управления частотой вращения.
В изобретении также предложен Кориолисов гироскоп, отличающийся тем, что он содержит устройство для определения ошибки смещения нуля Кориолисова гироскопа, содержащее:
- блок модуляции, модулирующий частоту считываемых колебаний Кориолисова гироскопа,
- блок демодуляции, демодулирующий выходной сигнал контура управления частотой вращения или контура квадратурного управления Кориолисова гироскопа синхронно с модуляцией частоты считываемых колебаний для получения дополнительного сигнала, являющегося мерой ошибки смещения нуля, и
- блок управления, вырабатывающий компенсационный сигнал и передающий его на вход контура управления частотой вращения или контура квадратурного управления, причем блок управления вырабатывает компенсационный сигнал таким образом, что дополнительный сигнал имеет насколько возможно малое значение.
В последующем описании изобретение рассмотрено более подробно на примере реализации со ссылками на сопровождающие фигуры, где:
фигура 1 - схема Кориолисова гироскопа, основанная на способе, предлагаемом в изобретении;
фигура 2 - схема обычного Кориолисова гироскопа;
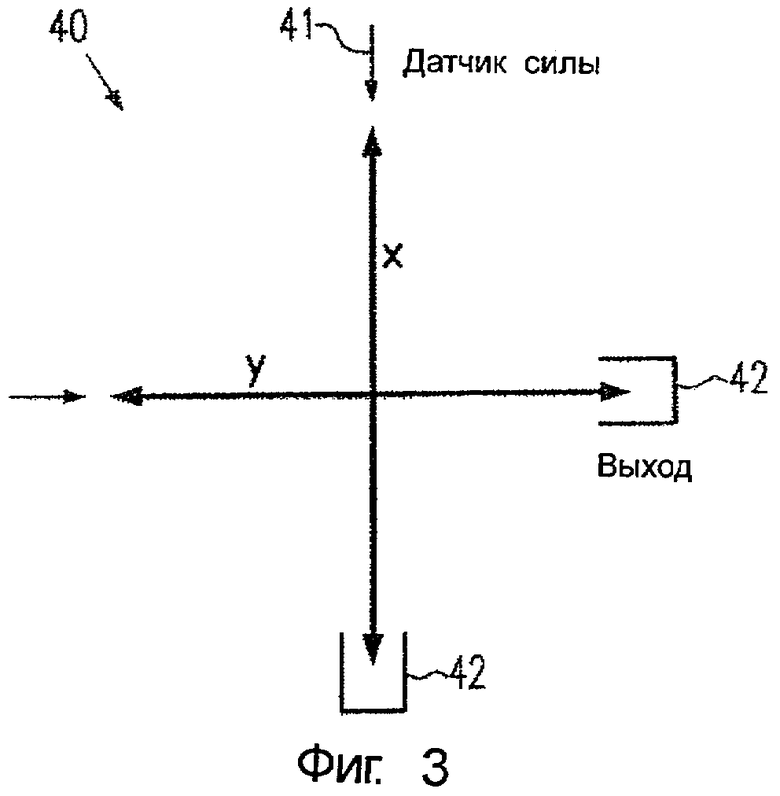
фигура 3 - схематический чертеж, поясняющий взаимодействие резонатора, датчика силы и считывающей системы в Кориолисовом гироскопе;
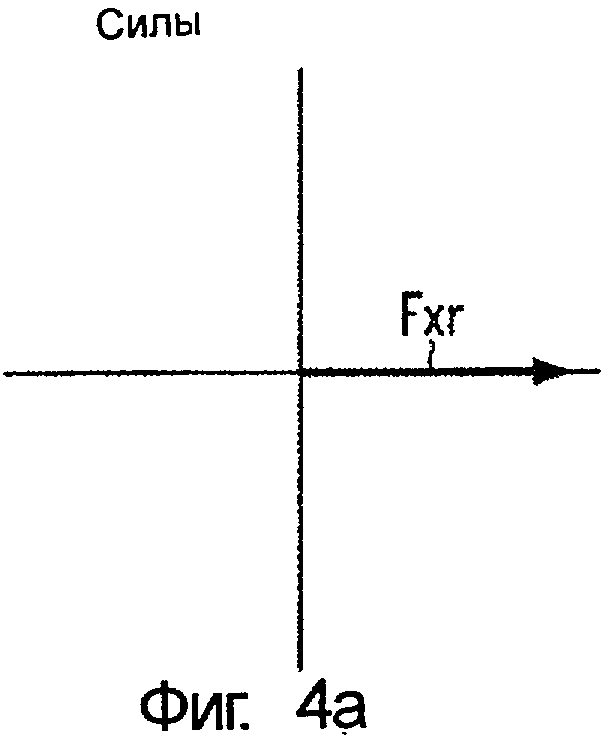
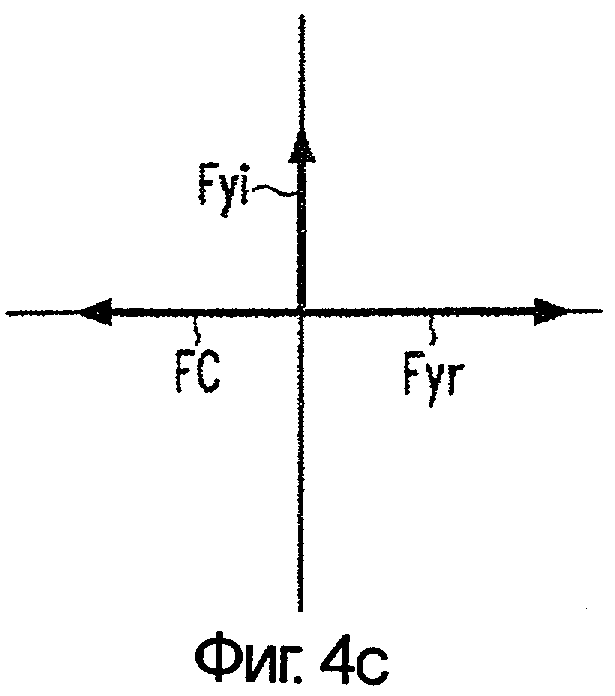
фигуры 4а-4d - схематические чертежи, поясняющие взаимодействие амплитуд силы и колебаний в Кориолисовом гироскопе с двойным резонансом;
фигуры 5а-5d - схематические чертежи, поясняющие взаимодействие амплитуд силы и колебаний в Кориолисовом гироскопе в состоянии, близком к двойному резонансу;
фигуры 6а-6d - схематические чертежи, поясняющие способ согласно изобретению при двойном резонансе;
фигуры 7а-7d - схематические чертежи, поясняющие способ согласно изобретению в состоянии, близком к двойному резонансу.
Части и устройства, соответствующие частям и устройствам на фигуре 2, обозначены одинаковыми символами и повторно не поясняются.
Прежде всего общие принципы функционирования Кориолисова гироскопа будут пояснены еще раз на фигурах 3-5, в форме векторной диаграммы (матрица Гауссовых чисел).
Способ согласно изобретению работает только тогда, когда двойной резонанс существенно присутствует в среднем. Фигуры, в наименовании которых присутствует «близкий к двойному резонансу», показывают отличные состояния, при которых ситуация, «близкая к двойному резонансу», возникает в результате модуляции резонансной частоты считываемых колебаний.
Фигура 3 схематично показывает Кориолисов гироскоп, а точнее систему 40, содержащую резонатор (не показан), датчик силы 41 и считывающую систему 42 в Кориолисовом гироскопе. Показаны также колебания х (возбуждение) и у (считывание), связанные одно с другим Кориолисовыми силами при вращении вправо относительно плоскости чертежа. Колебание х (комплексное, чисто мнимое при резонансе) возбуждается переменной силой с комплексной амплитудой Fx (в данном случае только вещественная часть Fxr). Колебание у (комплексное) вызывается переменной силой с комплексной амплитудой Fy, вещественной частью амплитуды Fyr и мнимой частью Fyi. Векторы вращения еiωt опущены в обоих случаях.
Фигуры 4а-4d показывают комплексные амплитуды сил и колебаний для идеального Кориолисова гироскопа с одинаковой резонансной частотой для колебаний х и у (двойной резонанс). Силой Fxr управляют таким образом, чтобы получить чисто мнимые, постоянные колебания х. Это обеспечивают регулятором 14 амплитуды, который управляет амплитудой колебаний х и регулятором 10 фазы / регулятором 9 частоты, который управляет фазой колебаний х. Рабочей частотой ω1 управляют таким образом, что колебания х являются чисто мнимыми, иными словами, управляющий сигнал поддерживает вещественную часть колебаний х, равной нулю.
Возникающая в процессе вращения Кориолисова сила FC является чисто вещественной, так как Кориолисова сила пропорциональна скорости колебаний х. Если оба колебания имеют одинаковую резонансную частоту, тогда колебания у, вызванные силой FC, будут иметь форму, показанную на фигуре 4d. Если резонансные частоты колебаний х и у слегка отличаются, появляются комплексные силы и комплексные колебания, имеющие форму, показанную на фигурах 5a...5d. В частности, это приводит к появлению колебаний у, вызванных силой FC, как показано на фигуре 5d.
При наличии двойного резонанса вещественная часть считываемого сигнала у равна нулю, но, наоборот, она не равна нулю при отсутствии двойного резонанса. В обоих случаях в исходном состоянии гироскопов Кориолисова сила FC обнуляется регулятором Fyr, который компенсирует FC. В случае, если Кориолисовы гироскопы работают при двойном резонансе, мнимая часть у обнуляется с помощью Fyr, а вещественная часть у обнуляется с помощью Fyi. Полоса пропускания обоих управляющих процессов составляет около 100 Гц.
Способ согласно изобретению далее разъясняется более подробно на примере реализации со ссылками на фигуру 1.
Возвратный Кориолисов гироскоп 1' дополнительно снабжен блоком 26 демодуляции, пятым фильтром 27 низких частот, управляющим блоком 28, блоком 29 модуляции и первым умножителем 30 или альтернативно вторым умножителем 31.
Блок 29 модуляции модулирует частоту считываемых колебаний резонатора 2 частотой ωmod. Выходной сигнал контура квадратурного управления подается на блок 26 демодуляции, который демодулирует этот сигнал синхронно с частотой ωmod для получения дополнительного сигнала. При наличии ошибки смещения нуля (то есть если имеются рассогласования между возбуждающими силами / датчиками силы / возвратными силами и реальными колебаниями резонатора 2) величина дополнительного сигнала изменяется в функциональной зависимости от частоты считываемых колебаний. Дополнительный сигнал подается на пятый фильтр 27 низких частот, а отфильтрованный сигнал подается на управляющий блок 28. Управляющий блок 28 использует отфильтрованный дополнительный сигнал как основу для формирования сигнала, подаваемого на умножитель 30. Последний умножает сигнал, полученный от блока 28 управления, на сигнал, вырабатываемый регулятором амплитуды 14 для управления амплитудой колебаний возбуждения. Компенсационный сигнал, полученный от умножителя, складывается со входом контура управления частотой вращения. Управляющий блок 28 вырабатывает сигнал для умножителя 30 таким образом, что величина дополнительного сигнала поддерживается насколько возможно малой. Этот сигнал корректирует ошибку смещения нуля. Более того, величина ошибки смещения нуля может быть определена по величине компенсационного сигнала, который представляет собой таким образом меру ошибки смещения нуля. Альтернативно выходной сигнал управляющего блока 28 может быть подан на второй умножитель 31, который умножает этот сигнал на считываемое значение колебаний возбуждения и добавляет полученный таким образом компенсационный сигнал к выходному сигналу считываемых колебаний. Обозначение «управляющий блок» не обязательно ограничивается блоком 28, но может также включать и первый и второй умножители 30 и 31.
Сигнал, подаваемый на блок демодуляции 26, альтернативно может также сниматься с других точек управляющих контуров.
Способ согласно изобретению, который только что был описан, может быть проиллюстрирован следующим образом со ссылками на фигуры 6а-6d и 7а-7d.
Вывод колебаний у (второй резонатор х2, 4) в общем случае также «видит» часть колебаний х (первый резонатор х1, 3): a21·x. Это вызывает появление ошибки смещения нуля Кориолисова гироскопа, которую требуется определить. На фигурах 6а-6d показана ситуация, возникающая при двойном резонансе, а на фигурах 7а-7d - близкая к двойному резонансу. В обоих случаях суммарный сигнал реального смещения у и a21·х сводится к нулю посредством Fyi и Fyr. Если a21 не равно нулю, Fxr не равно нулю при скорости вращения равной нулю (ошибка смещения нуля). Fyi становится нулевой только при наличии двойного резонанса. Квадратурное смещение появляется при различии резонансных частот.
Согласно изобретению компенсация a21 происходит следующим образом. Предполагается, что гироскоп работает при наличии двойного резонанса. Резонансную частоту считывающих колебаний, которая может быть расстроена электронным способом, модулируют блоком 29 модуляции при нулевом среднем значении (например, 55 Гц), а сигнал Fyi демодулируют блоком 26 демодуляции синхронно, когда удерживающие управляющие контуры замкнуты. Если бы а21 было равно нулю, тогда Fyi не изменялась бы по частоте, то есть последняя изменяется только тогда, когда a21 не равно нулю. Демодулированный сигнал подают на вход блока 28 управления (который предпочтительно выполнен в виде программного обеспечения), который управляет параметром a21comp (дополнительная переменная). Управляемую компоненту движения х, a21comp·x снимают с сигнала на выходе y (предпочтительно в виде программного обеспечения). Величиной этой компоненты, a21comp, управляют таким образом, что демодулированный сигнал Fyi становится равным нулю. Отсюда следует, что компоненты сигнала х на выходе сигнала у больше нет, и смещение нуля, вызванное их перекрестной связью, отсутствует. При двойном резонансе и при том же факторе Q только регулятор перекрестной связи мог бы обнулить смещение, вызванное перекрестными связями в канале чтения. Это происходит потому, что модуляция Fxr также слегка модулирует и амплитуду х. Таким образом, сумма составляющей силы х в Fyr и компоненты чтения х на выходе у обнуляется с помощью регулятора перекрестной связи. Таким образом, смещение исчезает, если Q факторы имеют одинаковое значение.
Альтернативно можно использовать шум для модуляции считываемых колебаний. При этом используют соответствующую синхронную демодуляцию шумовых компонент в сигнале чтения.




Изобретение относится к Кориолисовым или вибрационным гироскопам, имеющим в своем составе систему масс, находящихся в состоянии вынужденных колебаний. Способ определения ошибки смещения нуля Кориолисова гироскопа, в котором модулируют частоту считываемых колебаний, демодулируют выходной сигнал контура управления частотой вращения или контура квадратурного управления Кориолисова гироскопа синхронно с модуляцией частоты считываемых колебаний для получения дополнительного сигнала, являющегося мерой ошибки смещения нуля, вырабатывают компенсационный сигнал, который передают на вход контура управления частотой вращения или контура квадратурного управления, причем компенсационный сигнал вырабатывают таким образом, чтобы величина дополнительного сигнала была насколько возможно минимальной, что позволяет повысить точность гироскопа. 2 с. и 4 з.п. ф-лы, 7 ил.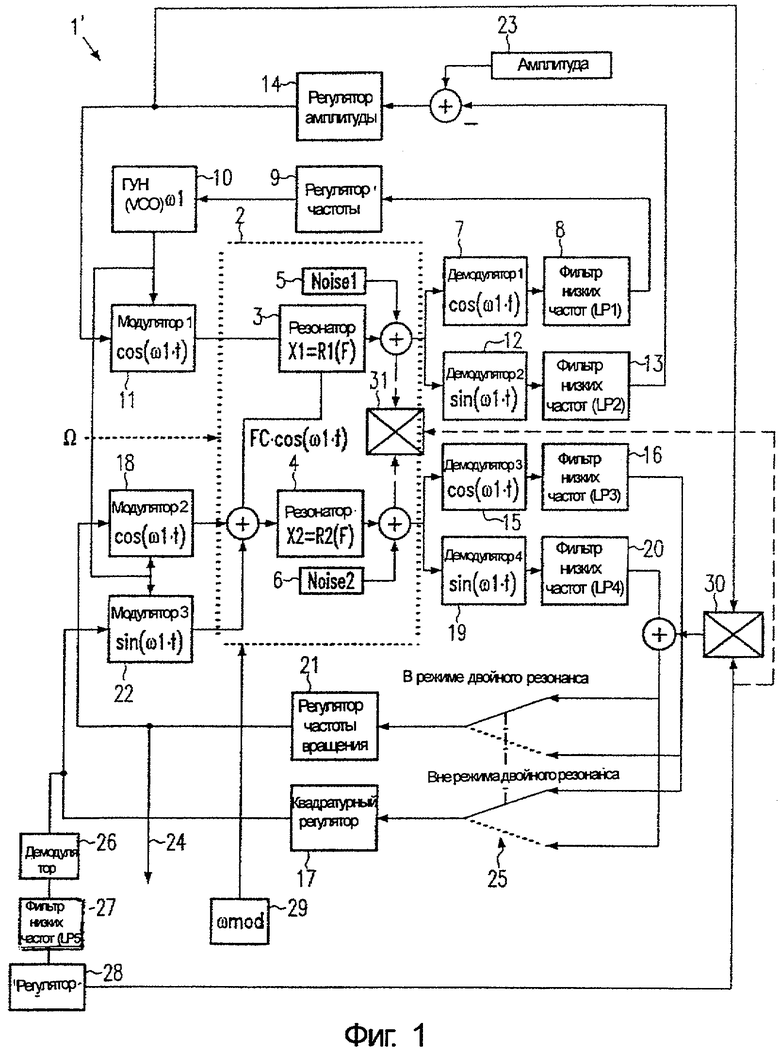
модулируют частоту считываемых колебаний,
выходной сигнал контура управления частотой вращения или контура квадратурного управления Кориолисова гироскопа (1') демодулируют синхронно с модуляцией частоты считываемых колебаний для получения дополнительного сигнала, который является мерой ошибки смещения нуля,
получают компенсационный сигнал, который передают на вход контура управления частотой вращения или контура квадратурного управления, при этом
величину компенсационного сигнала регулируют таким образом, чтобы величина дополнительного сигнала была насколько возможно малой.
блок (29) модуляции, соединенный с указанной системой масс (2), который модулирует частоту считывающих колебаний Кориолисова гироскопа (1'),
блок (26) демодуляции, соединенный с указанным контуром управления частотой вращения или контуром квадратурного управления, и который демодулирует выходной сигнал контура управления частотой вращения или контура квадратурного управления Кориолисова гироскопа (1') синхронно с модуляцией частоты считываемых колебаний для получения дополнительного сигнала, который является мерой ошибки смещения нуля, и
блок (28) управления, на который подается дополнительный сигнал и который вырабатывает компенсационный сигнал и передает его на вход контура управления частотой вращения или контура квадратурного управления, причем блок (28) управления вырабатывает компенсационный сигнал таким образом, что дополнительный сигнал имеет насколько возможно меньшее значение.
| US 5908986 А, 01.06.1999 | |||
| Способ определения износа режущего инструмента | 1955 |
|
SU114831A1 |
| DE 10062347 A1, 20.06.2002 | |||
| ВИБРАЦИОННЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2104557C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |

