Изобретение относится к областям энергетического машиностроения, авиастроения, судостроения, в частности к способам и устройствам, в которых используются помещенные в текучую среду и перемещающиеся в этой текучей среде рабочие органы (крылья, пропеллеры, гребные винты, турбинные колеса и т.п.) различных аэро- или гидродинамических устройств, в условиях аэро- или гидродинамического взаимодействия этих рабочих органов с текучей средой.
Изобретение может найти широкое применение в энергетике ветроэлектростанции или гидроэлектростанции, в авиации - движители летательных аппаратов (самолеты, вертолеты, автожиры, махолеты и т.п.) или активные элементы управления полетом летательных аппаратов, в водном транспорте - движители или активные элементы управления движением подводных и надводных судов всех типов, а также судов на "воздушной подушке", в промышленной аэро- или гидродинамике - вентиляторы, нагнетатели, компрессоры, насосы, в индустрии товаров для спорта, отдыха, развлечений, и т.д.
Терминология
Текучая среда - физическое вещество (газ, жидкость, суспензия, металл и т.п.), обладающее свойством текучести.
Крыло - рабочий орган, т.е. основной элемент конструкции аэро- или гидродинамических устройств, на котором в процессе взаимодействия с текучей средой первично возникает полезная сила, называемая подъемной силой.
Рабочая траектория крыла - часть траектории крыла, когда на крыле в результате взаимодействия с потоком возникает подъемная сила.
В известном движителе для создания движущей силы аппарата в текучей среде крыло шарнирно связано с приводом, жестко закрепленным на аппарате и сообщающим крылу возвратно-поступательное движение перпендикулярно потоку текучей среды. Крыло движителя снабжено устройством управления углом атаки, выполненным в виде связанного с этим крылом крыловидного элемента, имеющим собственный привод для управления его угловым положением относительно крыла. Это дает возможность обеспечить требуемые углы атаки крыла, при его работе в качестве движителя, на любых режимах движения аппарата, поскольку, при изменении величины установочного угла крыловидного элемента, изменяется положение системы - крыло с крыловидным элементом в потоке текучей среды. Однако не раскрыто, как управлять собственным приводом крыловидного элемента, а именно изменять величину установочного угла крыловидного элемента. Очевидно, что управление производится при остановленном крыле, а регулировка величины установочного угла крыловидного элемента влияет только на частоту колебательного процесса и не позволяет установить угол атаки крыла во время его поступательного движения. Таким образом, при наличии одного крыловидного элемента с одним собственным приводом не обеспечивается установка требуемого угла атаки крыла на марше и не обеспечивается оптимальное соотношение скорости перемещения крыла к скорости потока текучей среды на рабочей траектории.
Известны различные способы взаимодействия крыла и текучей среды, в которых реализуется безотрывное обтекание крыла текучей средой, например "Способ преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла и установка для его осуществления" (см. патент РФ №2141058 С1). Способ заключается в том, что при помещении крыла в текучую среду и при его взаимодействии с этой средой крыло устанавливают под углом атаки, достаточным для указанного взаимодействия. При перемещении крыла угол атаки выдерживают постоянным путем изменения угла между хордой крыла и потоком текучей среды. При достижении оптимального соотношения скорости перемещения крыла и скорости потока угол между хордой крыла и направлением движения потока выдерживают постоянным.
Однако этот способ не позволяет получить наилучшую эффективность взаимодействия крыла с текучей средой, т.к. наличие участков разгона и торможения не позволяет получить постоянную скорость перемещения крыла, а достигнутый постоянный угол атаки нельзя считать выгодным для всей траектории.
Из патента РФ №2141058 С1 известно также устройство для управления крылом, помещенным в текучую среду, при его взаимодействии с этой средой, оно содержит неподвижную опору, подвижно связанную с ней балку-каретку, шарнирно установленное на ней, по меньшей мере, одно крыло, привод. Устройством установки угла атаки выполнено в виде крыловидного элемента с собственным приводом для управления его угловым положением относительно крыла. Это позволяет получать большие углы атаки, что обеспечивает значительное повышение эффективности преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла. Однако устройство установки угла атаки крыла позволяет получить максимальный угол атаки, и при этом не допустив срыва потока, только при достижении наилучшего соотношения скоростей крыла и текучей среды, что, если и достигается, то кратковременно и это не обеспечивает значительного повышения эффективности на всей рабочей траектории крыла.
Технический результат изобретения заключается в автоматизации процесса взаимодействия крыла с текучей средой, получении в каждой точке рабочей траектории угла атаки крыла максимально возможным, при котором обеспечивается безотрывное обтекание крыла текучей средой, в обеспечении возможности контролирования углового положения крыла на всей траектории, что обеспечивает повышение скорости движения крыла и аэрогидродинамической силы на нем.
Указанный технический результат достигается тем, что при реализации способа управления крылом, помещенным в текучую среду, при его взаимодействии с этой средой, заключающегося в том, что крыло устанавливают под углом атаки, достаточным для указанного взаимодействия, часть крыла отделяют стабилизатором при не шарнирной его установке относительно оси вращения крыла с углом атаки, опережающим угол атаки крыла при движении, и поворачивают крыло до тех пор, пока на этой части крыла не наступает срыв потока текучей среды, после чего уменьшают угол атаки крыла.
Вышеуказанный технический результат также достигают тем, что устройство для управления крылом, помещенным в текучую среду, при его взаимодействии с этой средой, содержащее неподвижную опору, подвижно связанную с ней балку-каретку, шарнирно установленное на ней, по меньшей мере, одно крыло, привод, выполнено с пластиной, шарнирно установленной на каретке и имеющей кинематическую связь с крылом, также шарнирно установленным на каретке, а привод выполнен с возможностью получения энергии от ее источника и соединен с пластиной, по меньшей мере, одна часть крыла отделена стабилизатором при не шарнирной установке относительно оси вращения крыла таким образом, что при движении угол атаки ее всегда опережает угол атаки крыла, крыло и часть крыла снабжены датчиками динамической силы, которые включены в электрическую цепь привода посредством усилителя.
В таком устройстве целесообразно управлять приводом запрограммированными сигналами включенного в его электрическую цепь программного устройства.
В таком устройстве помимо части крыла, отделенной стабилизатором и повернутой относительно оси вращения крыла, еще одна часть крыла может быть отделена стабилизатором и может быть повернута относительно оси вращения крыла в обратную сторону.
Сущность изобретения поясняется сопроводительными чертежами.
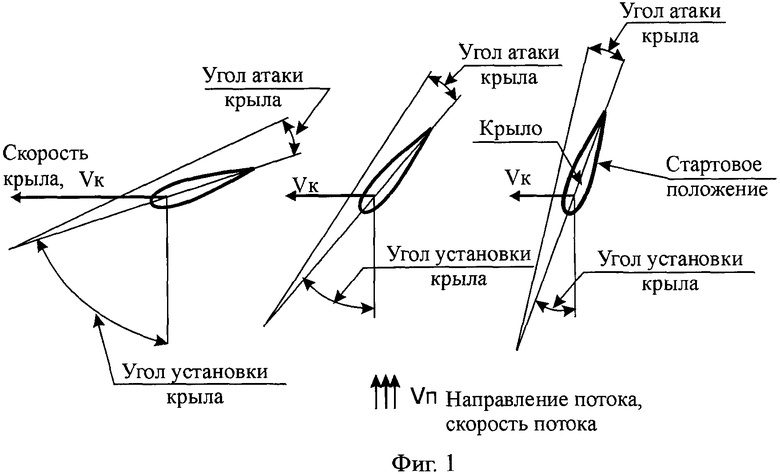
На фиг.1 изображено крыло при взаимодействии с текучей средой и векторы скоростей крыла.
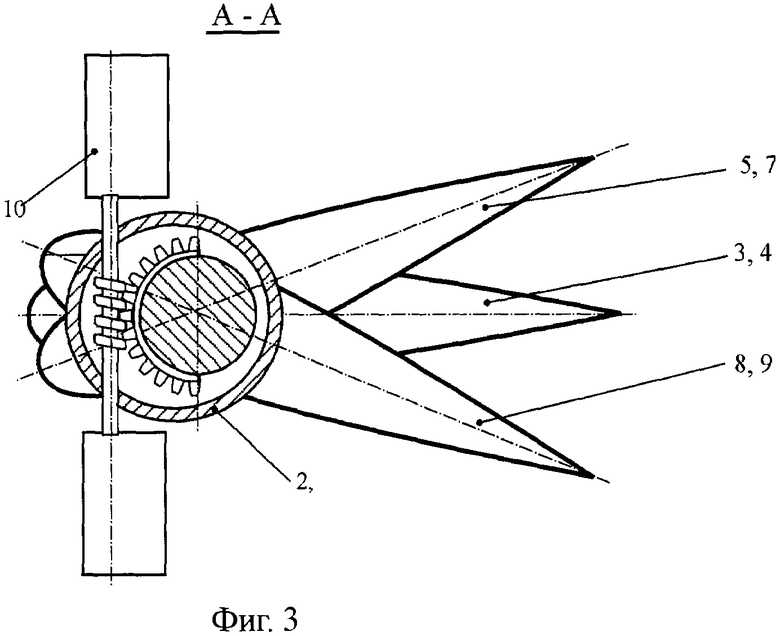
На фиг.2, 3 предоставлены чертежи устройства по патентуемому изобретению.
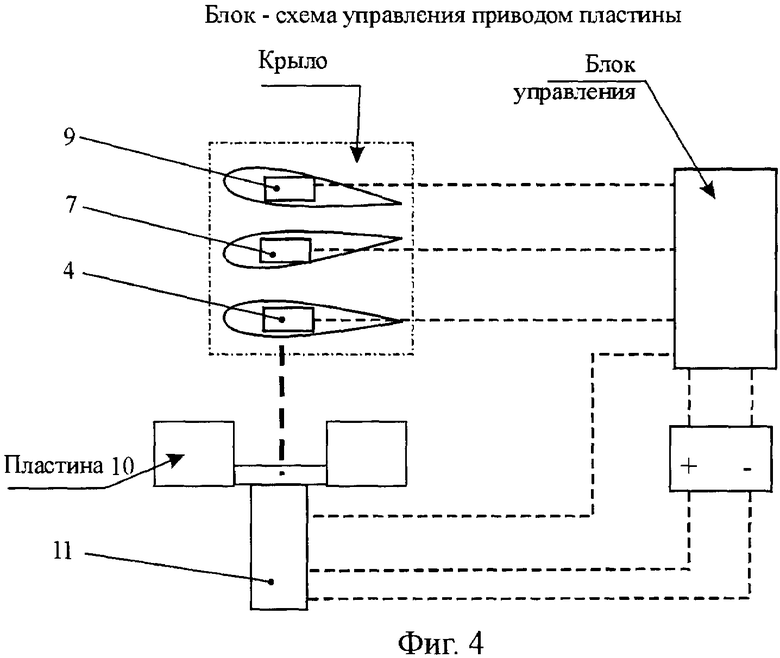
На фиг.4 предоставлена блок-схема управления приводом пластины по патентуемому изобретению.
Способ управления крылом, помещенным в текучую среду, при его взаимодействии с этой средой осуществляется следующим образом.
В текучую среду (фиг.1) помещают крыло, которое перемещают в текучей среде для взаимодействия с ней и при управлении поворачивают вокруг его продольной оси. Перемещают крыло, в одном случае, от динамических сил, возникающих при взаимодействии с текучей средой (когда крыло применяют для преобразования энергии потока текучей среды в полезную энергию), в другом случае, за счет привода, получающего энергию от внешнего источника (когда крыло применяют для создания движущей силы). Поворачивают крыло вокруг своей продольной оси за счет динамической силы, возникающей при взаимодействии с текучей средой, и за счет привода, получающего энергию от внешнего источника, тем самым изменяют величину угла установки крыла и получают требуемый угол атаки.
Крыло устанавливают под стартовым углом атаки, величина которого достаточна для начала взаимодействия крыла с текучей средой, в результате чего на крыле возникает аэрогидродинамическая сила, и оно перемещается. При перемещении крыла с нарастающей скоростью его поворачивают, меняют угол установки крыла, при этом увеличивают угол атаки крыла и контролируют скорость нарастания турбулизации потока текучей среды, присоединенного к крылу, не допуская срыва присоединенного к крылу потока текучей среды за счет уменьшения угла атаки крыла путем изменения угла установки крыла, далее вновь увеличивают угол атаки крыла, это обеспечивает безотрывное обтекание крыла текучей средой. В результате этого при любом изменении скорости перемещения крыла угол атаки выдерживается максимально возможным при безотрывном обтекании крыла текучей средой, контролируется угловое положение крыла на всей траектории, что обеспечивает повышение скорости движения крыла и аэрогидродинамической силы.
Устройство (см. фиг.2 и 3), осуществляющее заявленный способ управления крылом, помещенным в текучую среду, при его взаимодействии с этой средой, содержит неподвижную опору 1 с подвижно смонтированной на ней балкой-кареткой 2, на которой шарнирно установлено, по меньшей мере, одно крыло 3, снабженное датчиком 4 динамической силы, преобразующим значение динамической силы на нем в электрический сигнал (например, тензодатчик, установленный в месте крепления крыла к собственной оси). По меньшей мере, одна часть 5 крыла 3 отделена стабилизатором 6 при не шарнирной установке относительно оси вращения крыла таким образом, что при взаимодействии с текучей средой, при любом угле атаки, угол атаки ее всегда больше угла атаки всего крыла 3 за счет шарнирного поворота части 5 крыла от динамической силы, при этом ось вращения части 5 крыла смещена от центра действия ближе к передней кромке. Часть крыла 5 снабжена датчиком 7 динамической силы, преобразующим значение динамической силы на ней в электрический сигнал. Крыло 3 может содержать отделенную стабилизатором 6 и повернутую относительно оси вращения крыла часть 8, снабженную датчиком 9 динамической силы, преобразующим значение динамической силы на ней в электрический сигнал, при этом часть 5 повернута относительно оси вращения крыла в другую сторону, часть крыла 5 и часть 8 установлены жестко. На балке-каретке 2 установлена шарнирно на собственной оси, сориентированной вдоль потока текучей среды, пластина 10, имеющая кинематическую связь с осью крыла 3, при отклонении пластины 10 крыло 3 поворачивается. Для изменения своей аэрогидродинамической характеристики (например, для изменения площади взаимодействия с текучей средой) пластина 10 снабжена собственным приводом 11, получающим энергию от внешнего источника. Датчики 4, 7 и 9 динамической силы и привод 11 объединены в единую электрическую цепь, в состав которой входят источник питания и блок управления.
Заявляемая установка работает следующим образом. В текучую среду помещают крыло 3 и пластину 10, а неподвижную опору 1 закрепляют таким образом, чтобы крыло 3 перемещалось поперек потока текучей среды. Крыло 3 устанавливают под стартовым углом атаки к потоку текучей среды, оно, пластина 10 и каретка 2 перемещаются. При перемещении пластины 10 на ней появляется динамическая сила и пластина 10 отклоняется, изменяется угловое положение крыла 3 в сторону увеличения угла атаки, при этом на части 5 раньше, чем на крыле 3, возникает эффект отрыва присоединенного к ней потока текучей среды, динамическая сила на ней скачком изменяется, полученное значение сигнала датчика 7 динамической силы, установленного на ней, запоминается. Привод 11 изменяет аэрогидродинамическую характеристику пластины 10 таким образом, чтобы при изменении углового положения крыла 3 датчик 4 динамической силы, установленный на крыле 3, показывал наибольшее значение, а датчик 7 динамической силы, установленный на части 5, показывал достигнутое значение. Стабилизаторы 6 не допускают перемешивания потоков текучей среды, присоединенных к крылу 3 и к части 5. При достижении крайнего положения крыло 3 получает противоположный стартовый угол атаки и движется в обратную сторону. При применении данного устройства для управления крылом 3 в режиме постоянной нагрузки и постоянной скорости текучей среды возможно управление приводом 11 запрограммированными сигналами включенного в его электрическую цепь программного устройства. При установке на крыле 3 части 8 привод 11 управляется сигналами датчиков 4 и 7 при движении крыла 3 в одну сторону или сигналами датчиков 4 и 9 при движении крыла 3 в другую сторону. В результате этого при любом изменении скорости перемещения крыла угол атаки - максимально возможный, и при этом не допускается срыв присоединенного к крылу потока текучей среды.
В процессе перемещения крыла автоматически в зависимости от характеристик элементов электрической цепи (привод, датчики и блок управления) на всей траектории выдерживается максимально выгодный угол атаки крыла от стартовых значений до значений, которые выше критических величин при стационарных режимах обтекания в известных подобных технических устройствах, что обеспечивает получение максимальной скорости движения крыла и аэрогидродинамической силы на нем.
Изобретение относится к авиастроению, судостроению и энергетическому машиностроению и может использоваться в технологии управления крыльями, лопастями несущих и пропульсивных винтов, а также лопатками турбин. Способ управления крылом, помещенным в текучую среду, при его взаимодействии с этой средой состоит в том, что крыло устанавливают под углом атаки, достаточным для указанного взаимодействия. Часть крыла отделяют стабилизатором при нешарнирной ее установке относительно оси вращения крыла с углом атаки, опережающим угол атаки крыла при движении, и поворачивают крыло до тех пор, пока на этой части крыла не наступает срыв потока текучей среды, после чего уменьшают угол атаки крыла. Устройство для реализации способа имеет неподвижную опору, подвижно связанную с ней балку - каретку, шарнирно установленное на ней, по меньшей мере, одно крыло и привод. Устройство выполнено с пластиной, шарнирно установленной на каретке и имеющей кинематическую связь с крылом, также шарнирно установленным на каретке. Привод выполнен с возможностью получения энергии от ее источника и соединен с пластиной. По меньшей мере, одна часть крыла отделена стабилизатором при не шарнирной установке относительно оси вращения крыла таким образом, что при движении угол атаки ее всегда опережает угол атаки крыла. Крыло и часть крыла снабжены датчиками динамической силы, которые включены в электрическую цепь привода посредством усилителя. Привод может управляться запрограммированными сигналами включенного в его электрическую цепь программного устройства. Помимо части крыла, отделенной стабилизатором и повернутой относительно оси вращения крыла, еще одна часть крыла отделена стабилизатором и повернута относительно оси вращения крыла в другую сторону. Изобретение позволяет автоматизировать процесс управления крылом для повышения скорости движения крыла и аэрогидродинамической силы на нем. 2 н. и 2 з.п. ф-лы, 4 ил.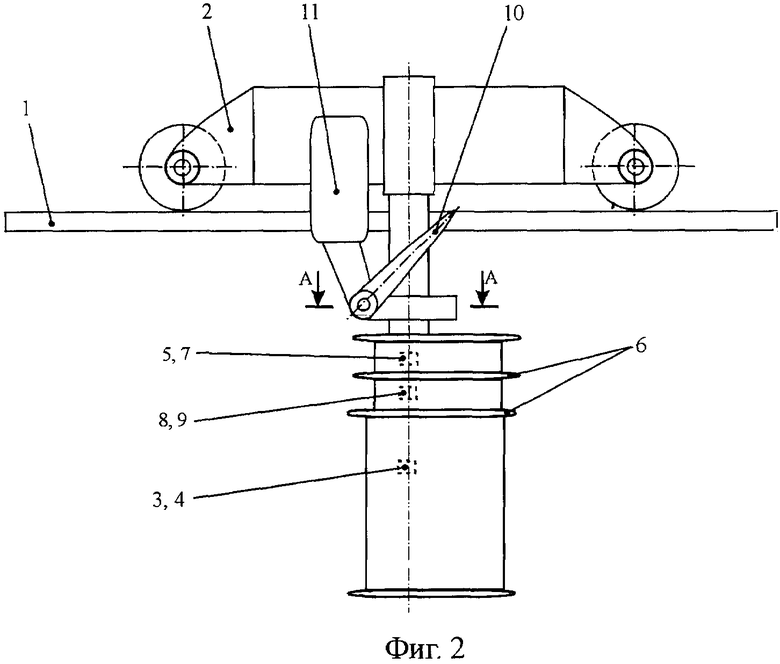
| СПИРО-АЗАБИЦИКЛИЧЕСКИЕ СОЕДИНЕНИЯ, СПОСОБЫ ИХ ПОЛУЧЕНИЯ И ПРОМЕЖУТОЧНЫЕ ПРОДУКТЫ | 1995 |
|
RU2148058C1 |
| САМОЛЕТ-АМФИБИЯ | 2002 |
|
RU2222477C1 |
| GB 818436 А, 19.08.1959. | |||

