Связанные заявки
Настоящая заявка заявляет приоритет предварительной заявки США № 60/419623 от 17 октября 2002.
Область техники
Настоящее изобретение относится к областям определения местоположения, квадратичной интерполяции и геолокационных систем на основе GPS (Системы глобального позиционирования), более конкретно, к процедурам оценки параметра, например местоположения или коэффициента масштабирования, локальных максимумов или минимумов функции, например корреляционной функции сигнала GPS.
Предшествующий уровень техники
Геолокационная система на основе GPS представляет собой систему орбитальных спутников Земли, посредством которой объекты, находящиеся в поле зрения спутников, могут определять свое местоположение. Каждый из спутников передает сигнал, маркированный повторяющимся псевдошумовым (ПШ) кодом, состоящим из 1023 элементарных кодовых элементов, уникальным образом идентифицирующим спутник. 1023 элементарных кодовых элементов повторяются каждую миллисекунду (мс). Сигнал также модулируется битами данных, где каждый бит данных в модулированном сигнале имеет длительность 20 мс.
Как показано на фиг.1, абонентская станция 100 в системе беспроводной связи принимает передачи от спутников 102а, 102b, 102с, 102d системы GPS, находящихся в поле зрения станции, и получает различные измерения и связанные значения из каждой из четырех или более передач. Станция 100 затем передает эти результаты измерений и значения к пункту 104 определения местоположения, который оценивает из этих результатов измерений и значений местоположение и скорость станции 100. Альтернативно станция 100 сама определяет свое местоположение и скорость из этих результатов измерений и значений.
Станция 100 осуществляет поиск передачи от конкретного спутника путем определения корреляции ПШ кода для спутника с принятым сигналом, который в типовом случае представляет собой совокупность сигналов, передаваемых одним или более спутниками, которые находятся в поле зрения приемника станции, в присутствии шумов. Обычно выполняется определение двумерной корреляции. В отношении первого измерения, соответствующего фазе кода, определение корреляции производится в диапазоне возможных сдвигов ПШ кода, представляющем собой окно W поиска. Каждое определение корреляции выполняется на длительности времени I интегрирования, которое может быть выражено как произведение Nc и М, где Nc - время когерентного интегрирования и М - количество когерентных интегрирований, объединяемых некогерентным образом. В отношении второго измерения, соответствующего доплеровской частоте, определение корреляции производится в диапазоне возможных доплеровских частот.
Полученные в результате значения корреляции определяют двумерную корреляционную функцию. Корреляционная функция дискретизируется, и максимумы корреляционной функции распределяются по каждому из двух измерений. В типовом случае максимумы также сравниваются с заданным порогом, выбранным таким образом, чтобы вероятность ложной тревоги находилась на заданном значении или была ниже этого значения. Местоположение наибольшего максимума по измерению, соответствующему фазе кода, формирует измеренное значение времени для спутника. Аналогичным образом, местоположение наибольшего максимума по измерению, соответствующему доплеровской частоте, формирует измеренное значение доплеровской частоты для спутника. Также получают измеренные значения максимальной энергии на основе высоты наибольших максимумов по измерениям, соответствующим фазе кода и доплеровской частоте.
Ввиду отсутствия синхронизации с тактовым сигналом дискретизации часто имеет место расхождение между местоположениями дискретизированного и действительного максимумов по измерениям, соответствующим фазе кода и доплеровской частоте, и между высотами дискретизированного и действительного максимумов по обоим измерениям.
К выборкам корреляционной функции часто применяется интерполяция, чтобы более точно оценить местоположения и высоты действительных максимумов. В квадратичной интерполяции, например, квадратичная функция аппроксимируется по трем выборкам корреляционной функции. Максимум квадратичной функции часто является более точной оценкой действительного максимума, чем дискретизированное значение максимума.
Однако форма корреляционной функции GPS по измерениям, соответствующим как фазе кода, так и доплеровской частоте, редко напоминает квадратичную функцию. Действительная форма импульса корреляции будет зависеть от точной фильтрации, используемой в приемном тракте приемника и от параметров поиска Nc и М. Следовательно, местоположения интерполированных и действительных максимумов зачастую будут расходиться относительно друг друга, как и высоты интерполированных и действительных максимумов.
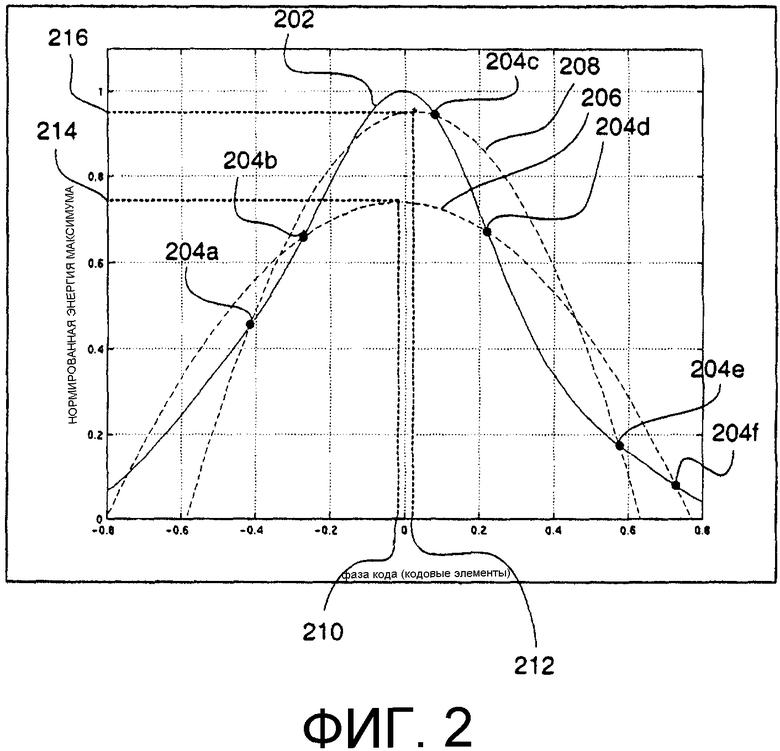
На фиг.2 показан импульс 202 корреляционной функции GPS по измерению, соответствующему фазе кода. Форма этого конкретного импульса соответствует конкретному набору фильтров и установке параметра Nc равным 20 мс. Максимум этого импульса соответствует 0 кодовых элементов, а высота (в нормированных единицах) равна 1. Первая квадратичная функция 206 аппроксимирует выборки 204b, 204d и 204f импульса 202. Вторая квадратичная функция 208 аппроксимирует выборки 204а, 204с и 204е импульса 202. Местоположение 210 максимума первой квадратичной функции 206 и местоположение 212 максимума второй квадратичной функции 208 получают из местоположения истинного максимума (0 кодовых элементов). Аналогичным образом, высоту 214 максимума первой квадратичной функции 206 и высоту 216 максимума второй квадратичной функции 208 получают из высоты истинного максимума (1 в нормированных единицах).
Следовательно, оценки местоположения и скорости, отклоняющиеся от местоположений и высот интерполированных максимумов, часто будут ошибочными. Ошибка в определении местоположения максимума корреляционной функции по измерению, соответствующему фазе кода, может привести к существенной ошибке в оценке местоположения. В конкретном примере, приведенном на фиг.2, ошибка в определении местоположения максимума приводит к ошибке ±15 м в оценке местоположения.
Более того, современные процедуры интерполяции, которые обеспечивают более высокую точность, чем квадратичная интерполяция, являются дорогостоящими и требуют высоких затрат времени и поэтому менее пригодны для применения в электронных устройствах широкого потребления, таких как беспроводные устройства связи.
Сущность изобретения
Заявлен способ оценки параметров локальных максимумов или минимумов функции. В одном варианте осуществления способ начинается с выполнения интерполяции по выборкам функции в локальных максимумах или минимумах или в их окрестности для получения в результате интерполированных локальных максимумов или минимумов.
Затем определяют сдвиг интерполяции. Сдвиг интерполяции представляет собой отклонение между местоположениями интерполированных локальных максимумов или минимумов и дискретизированных локальных максимумов или минимумов. Затем из сдвига интерполяции получают оценку параметра.
В одном варианте осуществления функция представляет собой двумерную корреляционную функцию, имеющую измерение, соответствующее фазе кода, и измерение, соответствующее доплеровской частоте. Параметр, который должен быть определен, представляет собой местоположение или коэффициент масштабирования максимума корреляционной функции по одному из двух измерений. Квадратичная функция аппроксимируется по множеству выборок корреляционной функции в значении максимума или в окрестности этого значения, и затем определяется максимум квадратичной функции.
Затем получают сдвиг интерполяции, равный разности между местоположением пика квадратичной функции и местоположением дискретизированного максимума. Затем из сдвига интерполяции определяется параметр максимума, такой как его местоположение или высота.
В одной реализации смещение параметра имеет предварительно установленное соотношение со сдвигом интерполяции. В этой реализации оценка параметра получается с использованием двухступенчатого процесса. Сначала выводится смещение параметра, соответствующее сдвигу интерполяции, с использованием предварительно установленного соотношения. Затем оценка параметра выводится из смещения параметра.
В одном примере параметр, который должен быть оценен, представляет собой местоположение максимума корреляционной функции по измерению, соответствующему фазе кода. Получают сдвиг интерполяции, равный разности между местоположениями интерполированного и дискретизированного максимумов по измерению, соответствующему фазе кода. Смещение фазы кода, соответствующее этому сдвигу интерполяции, определяется затем путем обращения к таблице перекодировки, реализующей предварительно установленное соотношение, которое имеет место между этими двумя переменными. Это смещение фазы кода добавляется к сдвигу интерполяции для получения оценки положения максимума по измерению, соответствующему фазе кода.
Во втором примере параметр, который должен быть оценен, представляет собой высоту максимума корреляционной функции по измерению, соответствующему фазе кода. Получают сдвиг интерполяции, вновь равный разности между местоположениями интерполированного и дискретизированного максимумов по измерению, соответствующему фазе кода. Смещение энергии максимума, соответствующее этому сдвигу интерполяции, определяется затем путем обращения к таблице перекодировки, реализующей предварительно установленное соотношение, которое имеет место между этими двумя переменными. Это смещение энергии максимума добавляется к энергии интерполированного максимума для получения оценки высоты максимума по измерению, соответствующему фазе кода.
В третьем примере параметр, который должен быть оценен, представляет собой местоположение максимума корреляционной функции по измерению, соответствующему доплеровской частоте. Получают сдвиг интерполяции, равный разности между интерполированным и дискретизированным максимумами по измерению, соответствующему доплеровской частоте. Смещение доплеровской частоты, соответствующее этому сдвигу интерполяции, определяется путем обращения к таблице перекодировки, реализующей предварительно установленное соотношение, которое имеет место между этими двумя переменными. Это смещение доплеровской частоты добавляется к сдвигу интерполяции для получения оценки положения максимума по измерению, соответствующему доплеровской частоте.
В четвертом примере параметр, который должен быть оценен, представляет собой высоту максимума корреляционной функции по измерению, соответствующему доплеровской частоте. Получают сдвиг интерполяции, вновь равный разности между интерполированным и дискретизированным максимумами по измерению, соответствующему доплеровской частоте. Смещение энергии максимума, соответствующее этому сдвигу интерполяции, определяется посредством предварительно установленного соотношения, которое имеет место между этими двумя переменными. Это смещение энергии максимума добавляется к энергии интерполированного максимума для получения оценки высоты максимума по измерению, соответствующему доплеровской частоте.
Также описаны носители данных, физически реализующие эти способы и соответствующие системы.
Краткое описание чертежей
Компоненты на чертежах не обязательно показаны в масштабе, вместо этого внимание концентрируется на иллюстрации принципов изобретения. На чертежах одинаковыми ссылочными позициями обозначены соответствующие элементы на всех представленных видах.
Фиг.1 - схема геолокационной системы GPS.
Фиг.2 - диаграмма, иллюстрирующая ошибку интерполяции, в корреляционной функции, полученной из принятого сигнала в геолокационной системе GPS.
Фиг.3 - пример двумерной корреляционной функции GPS, причем первое измерение соответствует фазе кода, а второе измерение - доплеровской частоте.
Фиг.4 - пример импульса корреляционной функции GPS по измерению, соответствующему фазе кода.
Фиг.5 - пример импульса корреляционной функции GPS по измерению, соответствующему доплеровской частоте.
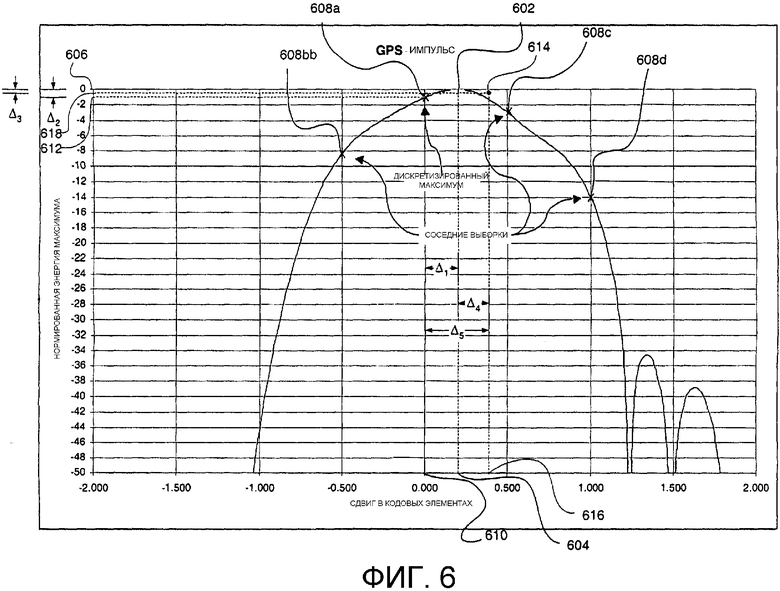
Фиг.6 - диаграмма, иллюстрирующая сдвиг интерполяции и смещение параметра в контексте импульса корреляционной функции GPS по измерению, соответствующему фазе кода.
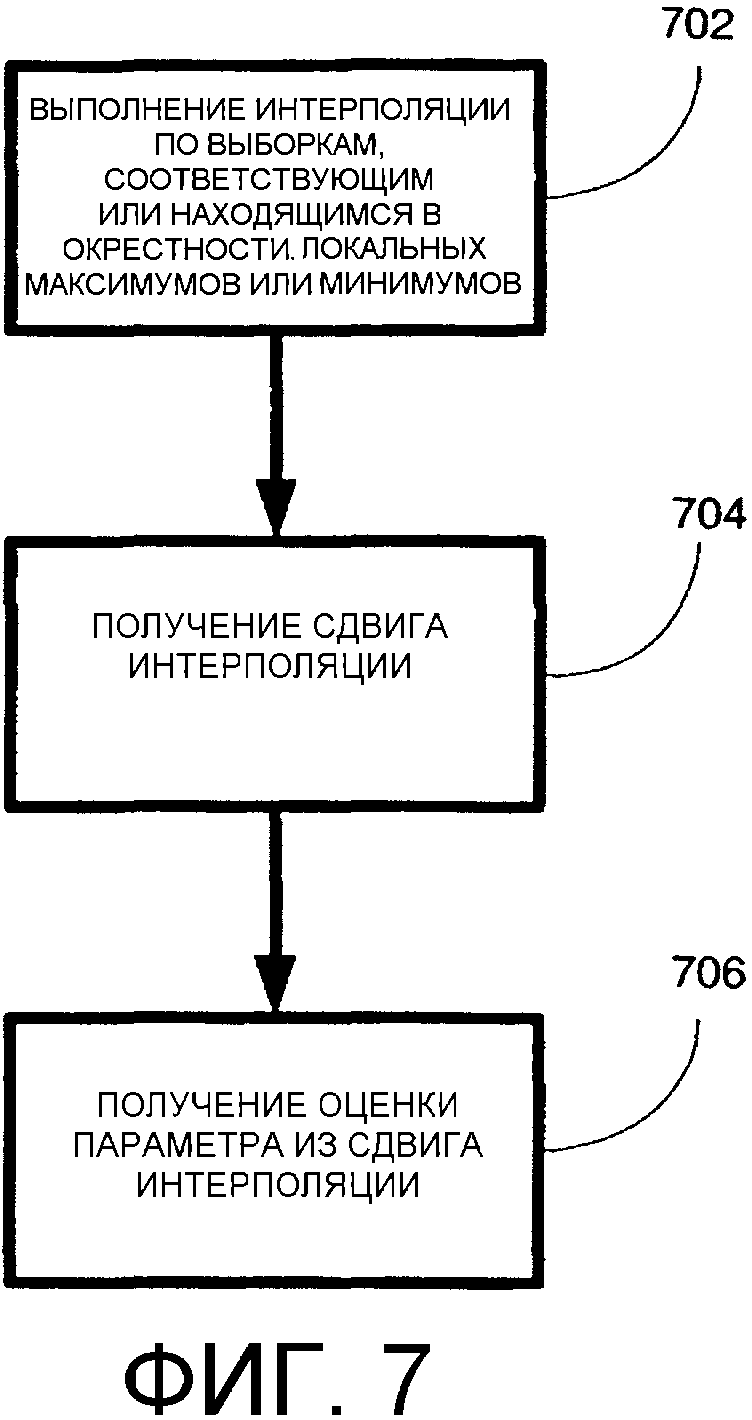
Фиг.7 - блок-схема варианта осуществления способа оценки параметра локальных максимумов или минимумов функции согласно изобретению.
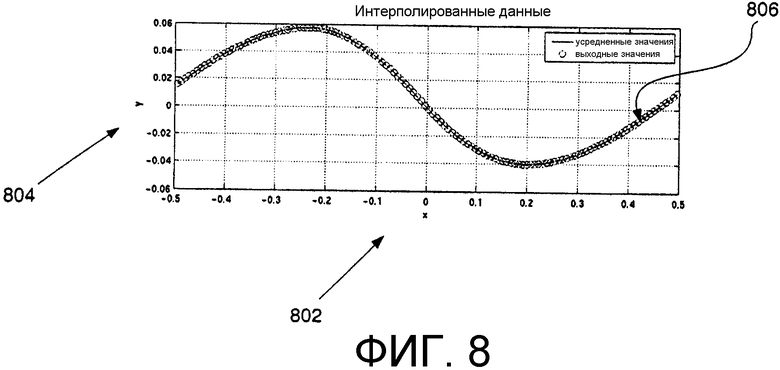
Фиг.8 - пример предварительно определенного соотношения между сдвигом интерполяции и смещением кода фазы.
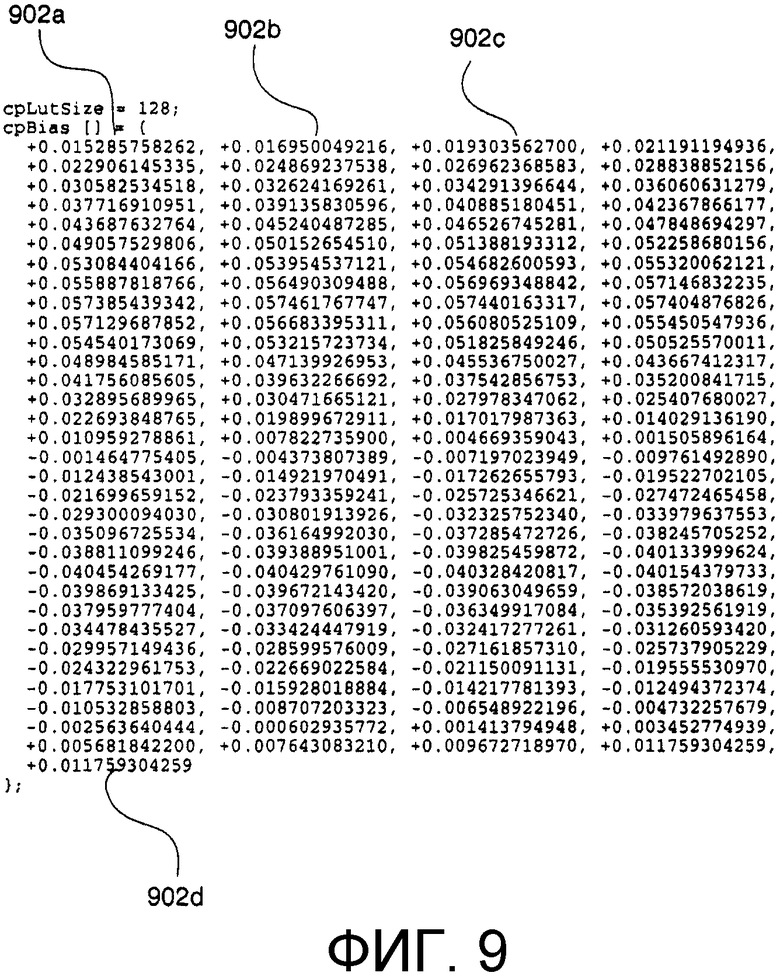
Фиг.9 - пример таблицы перекодировки, реализующей соотношение по фиг.8.
Фиг.10 - пример предварительно определенного соотношения между сдвигом интерполяции и смещением доплеровской частоты.
Фиг.11 - пример таблицы перекодировки, реализующей соотношение по фиг.10.
Фиг.12 - пример предварительно определенного соотношения между сдвигом интерполяции по измерению, соответствующему фазе кода, и смещением энергии максимума.
Фиг.13 - пример таблицы перекодировки, реализующей соотношение по фиг.12.
Фиг.14 - пример предварительно определенного соотношения между сдвигом интерполяции по измерению, соответствующему доплеровской частоте, и смещением энергии максимума.
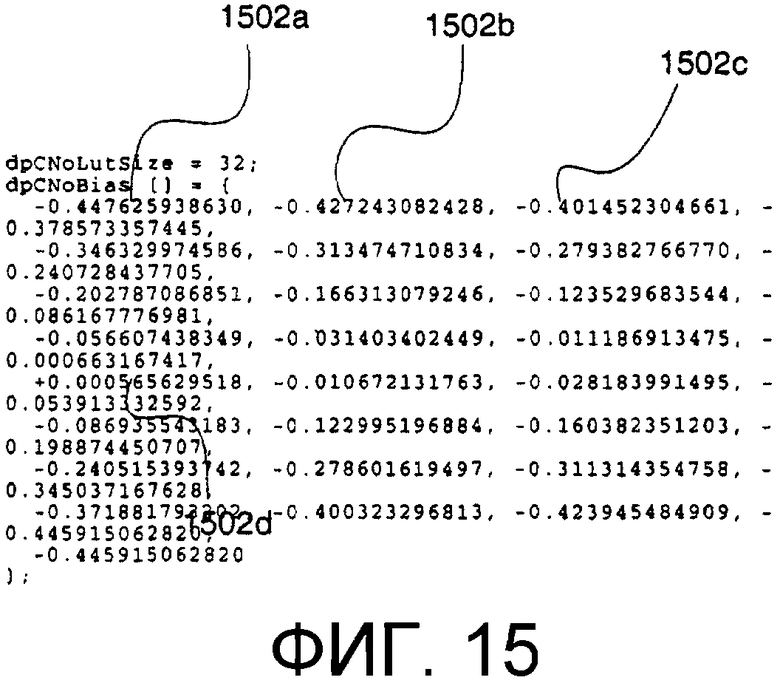
Фиг.15 - пример таблицы перекодировки, реализующей соотношение по фиг.14.
Фиг.16 - блок-схема варианта осуществления системы для оценки параметра локальных максимумов или минимумов функции в соответствии с изобретением.
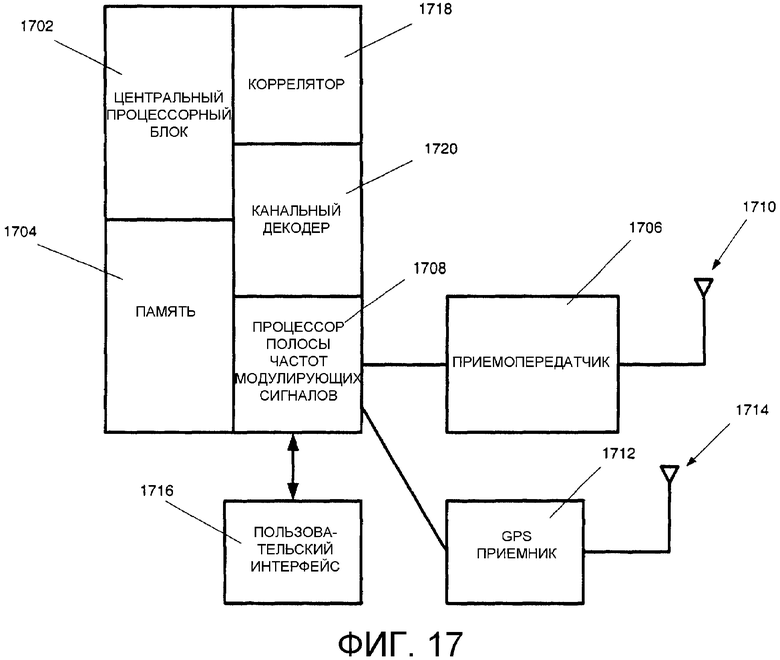
Фиг.17 - блок-схема варианта осуществления абонентской станции, реализующей систему по фиг.16.
Детальное описание
Термины «примерно», «по существу», как они используются в настоящем описании, предназначены для того, чтобы обеспечить некоторую свободу в математической точности, чтобы учесть допуска, которые приемлемы на практике. Соответственно, любые отклонения вверх или вниз от значения, видоизмененного за счет применения терминов «примерно» или «по существу» в пределах от 1% до 20%, должны рассматриваться как явно находящиеся в рамках указанного значения.
Кроме того, термин «программное обеспечение», как он используется в настоящем описании, включает в себя исходный код, код на языке ассемблера, двоичный код, программно-аппаратное обеспечение, макрокоманды, микрокоманды и т.п. или любую комбинацию двух или более указанных объектов.
Кроме того, термин «память» относится к любому считываемому процессором носителю, включая, без ограничения указанным, ОЗУ, ПЗУ, стираемое программируемое ПЗУ (ППЗУ), ППЗУ, электронно-стираемое ППЗУ, диск, гибкий диск, жесткий диск, ПЗУ на компакт-диске (CD-ROM), цифровой многофункциональный диск (DVD) и т.п. или любую комбинацию двух или более указанных объектов, на которых может быть сохранена последовательность команд программного обеспечения, исполняемых процессором.
Термины «процессор» или «центральный процессорный блок» (CPU) относятся к любому устройству, имеющему возможность исполнения последовательности команд и включающему в себя, без ограничения указанным, универсальный или специализированный микропроцессор, автомат конечных состояний, контроллер, компьютер, цифровой процессор сигналы (DSP) и т.п.
Обще сведения о корреляционных функциях и ошибке интерполяции
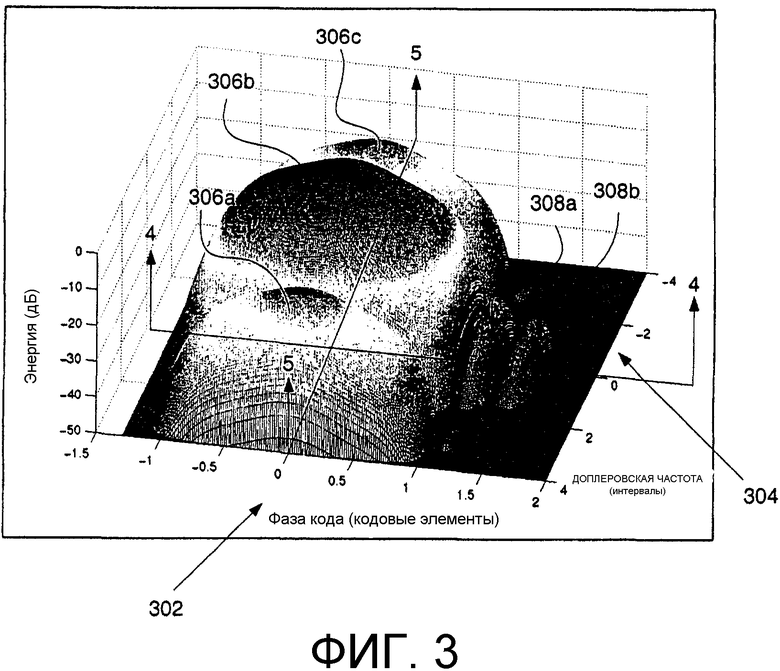
На фиг.3 показан пример двумерной корреляционной функции, полученной из принятого сигнала в геолокационной системе GPS. Принятый сигнал является составным сигналом, состоящим из одной или более сигнальных составляющих, каждая из которых передается спутником GPS.
Корреляционную функцию получают путем коррелирования принимаемого сигнала с ПШ кодом для одного из спутников. Определения корреляции выполняются по множеству возможных значений фазы кода и доплеровской частоты. Корреляционная функция представляет энергию корреляции в дБ или в линейных единицах измерения в графическом представлении в двух измерениях, соответствующих фазе кода и доплеровской частоте. В примере, показанном на фиг.3, измерение, соответствующее фазе кода, обозначено ссылочной позицией 302, а измерение, соответствующее доплеровской частоте, обозначено ссылочной позицией 304.
В примере, представленном на фиг.3, по измерению 304, соответствующему доплеровской частоте, корреляционная функция состоит из основного лепестка 306b и двух боковых лепестков 306а, 306с. По измерению 302, соответствующему фазе кода, корреляционная функция состоит из основного лепестка 306b и двух боковых лепестков 308а, 308b. Возможны другие примеры, поэтому ничто из вышеуказанного не должно приниматься в качестве ограничения.
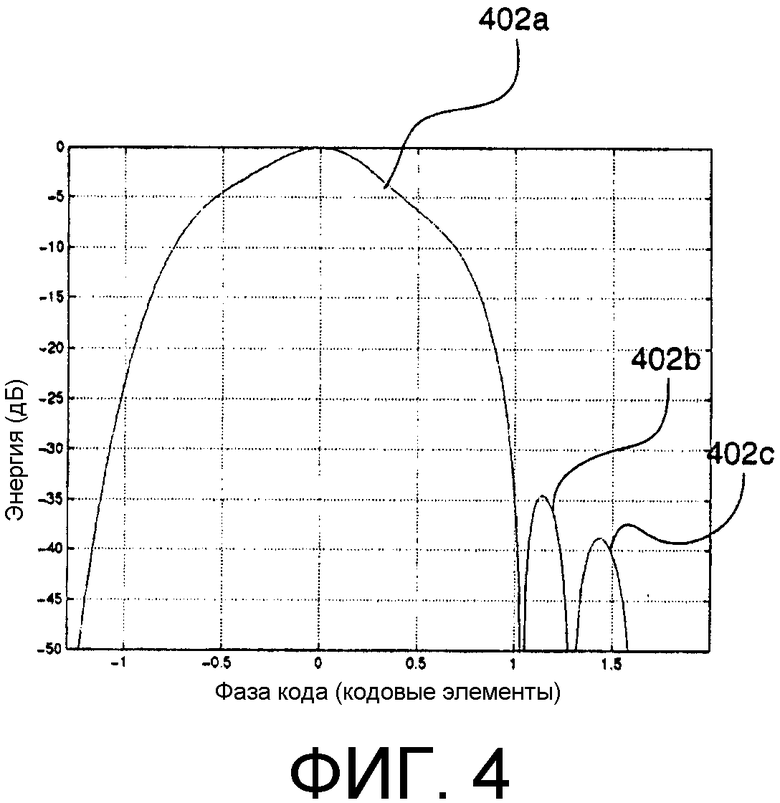
На фиг.4 показан вид сбоку корреляционной функции, показанной на фиг.3 по оси 4-4. Показано, что основной лепесток 306b формирует основной импульс 402а, а боковые лепестки 308а, 308b формируют два боковых импульса 402b, 402c. Основной импульс 402а представляет собой импульс, используемый в целях определения местоположения.
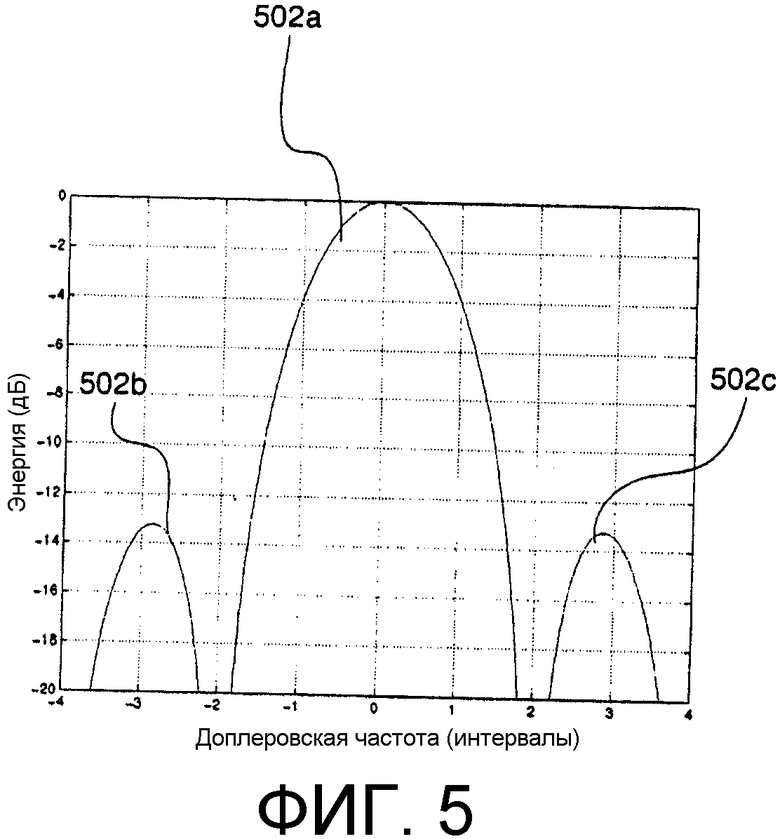
На фиг.5 показан вид сбоку корреляционной функции, показанной на фиг.3 по оси 5-5. Показано, что основной лепесток 306b формирует основной импульс 502а, а боковые лепестки 306а, 306с формируют два боковых импульса 502b, 502c. Основной импульс 502а представляет собой импульс, используемый в целях определения местоположения.
Максимум корреляционной функции характеризуется одним или более параметрами максимума. Примеры этого включают местоположение максимума по измерению, соответствующему фазе кода, местоположение максимума по измерению, соответствующему доплеровской частоте, и высоту (энергию) пика по любому измерению. На фиг.6, которая иллюстрирует импульсы по фиг.4 на более высоком уровне детализации, местоположение максимума 602 по измерению, соответствующему фазе кода, обозначено ссылочной позицией 604, а нормированная энергия максимума (в дБ) обозначена ссылочной позицией 606. Эти параметры называют параметрами действительного максимума.
Дискретизированный максимум, представленный выборкой, ближайшей к высоте действительного максимума, обозначен ссылочной позицией 608а. Дискретизированный максимум характеризуется одним или более параметрами дискретизированного максимума, включая местоположение 610 дискретизированного максимума по измерению, соответствующему фазе кода, местоположение (не показано на фиг.6) дискретизированного максимума по измерению, соответствующему доплеровской частоте, и нормированную энергию дискретизированного максимума, обозначенную ссылочной позицией 612.
Обычно имеется расхождение между дискретизированным и действительным максимумами вследствие асинхронного характера тактового сигнала дискретизации по отношению к местоположению действительного максимума. Это трансформируется в расхождение между параметрами действительного и дискретизированного максимума. Например, на фиг.6 отклонение между местоположениями действительного и дискретизированного максимума по измерению, соответствующему фазе кода, равно Δ1, а отклонение между высотами действительного и дискретизированного максимума равно Δ2.
Интерполированный максимум обозначен ссылочной позицией 614. Этот интерполированный максимум, который предполагается полученным посредством квадратичной интерполяции, примененной к выборкам 608а, 608b и 608c, характеризуется одним или более параметрами, включая местоположение 616 интерполированного максимума по измерению, соответствующему фазе кода, местоположение (не показано) интерполированного максимума по измерению, соответствующему доплеровской частоте, и высоту 618 интерполированного максимума.
Отклонение между параметром, таким как местоположение или коэффициент масштабирования, интерполированного максимума и действительного максимума представляет собой ошибку интерполяции. На фиг.6 ошибка интерполяции между высотами действительного и интерполированного максимумов равна Δ3, а ошибка интерполяции между местоположениями действительного и дискретизированного максимумов по измерению, соответствующему фазе кода, равна Δ4.
Варианты осуществления изобретения
Фиг.7 иллюстрирует блок-схему варианта осуществления способа оценки параметра локальных максимумов или минимумов функции. Способ начинается с этапа 7023. На этапе 702 способ включает в себя выполнение интерполяции выборок функции в максимумах или минимумах или в их окрестности для получения в результате интерполированных локальных максимумов или минимумов. В одной реализации функция представляет собой двумерную корреляционную функцию, имеющую измерение, соответствующее фазе кода, и измерение, соответствующее доплеровской частоте. В этой реализации этап 702 содержит подгонку квадратичной функции к трем выборкам в значении максимума или его окрестности для корреляционной функции по одному из двух измерений и затем определение максимума квадратичной функции.
За этапом 702 следует этап 704, который включает в себя получение сдвига интерполяции. Сдвиг интерполяции представляет собой разность между местоположением интерполированных локальных максимумов или минимумов, определенных на этапе 702, и местоположением дискретизированных локальных максимумов или минимумов. В одном примере дискретизированные локальные максимумы или минимумы представляют собой наибольшую или наименьшую выборку (соответственно тому, используется ли локальный максимум или минимум) среди множества выборок, используемых в процессе интерполяции.
В одном варианте осуществления сдвиг интерполяции представляет собой разность между местоположениями интерполированных и дискретизированных локальных максимумов или минимумов корреляционной функции по измерениям, соответствующим фазе кода или доплеровской частоты. На фиг.6, например, сдвиг интерполяции представляет собой разность Δ5 между местоположениями дискретизированных и интерполированных максимумов корреляционной функции по измерению, соответствующему фазе кода.
Согласно фиг.7, способ с этапа 704 переходит на этап 706, включающий в себя получение оценки параметра из сдвига интерполяции.
В одном варианте осуществления этап 706 содержит получение смещения параметра из сдвига интерполяции с использованием предварительно установленного соотношения, которое имеет место между этими двумя переменными, и затем получение оценки параметра из смещения параметра. В другом варианте осуществления этот этап содержит получение оценки параметра непосредственно из сдвига интерполяции.
В одном примере сдвиг интерполяции представляет собой отклонение между местоположениями интерполированного и дискретизированного максимумов корреляционной функции по измерению, соответствующему фазе кода. Смещение фазы кода взаимосвязано с этим сдвигом интерполяции, как показано на фиг.8. Ссылочная позиция 802 обозначает сдвиг интерполяции, выраженный в кодовых элементах, ссылочная позиция 804 обозначает смещение фазы кода, и ссылочная позиция 806 обозначает кривую, которая воплощает соотношение между этими двумя переменными. Как можно видеть, в этом конкретном примере, для сдвига интерполяции в диапазоне от -0,5 до +0,5 смещение фазы кода находится в пределах от -0,00405 до +0,0575 кодового элемента, что трансформируется в значения от - 11,87 до +16,85 метров.
В одной реализации этого примера соотношение между сдвигом интерполяции и смещением фазы кода реализовано в виде таблицы перекодировки. С использованием этой таблицы перекодировки смещение фазы кода определяется в соответствии со сдвигом интерполяции. Смещение фазы кода добавляется к сдвигу интерполяции для формирования оценки местоположения максимума по измерению, соответствующему фазе кода. В этом конкретном примере оценка выражается через смещение фазы кода между дискретизированным и действительным максимумами, но должно быть понятно, что возможны другие формы выражения оценки, такие как смещение фазы кода между интерполированным и действительным максимумами. Более того, в этом конкретном примере обращение к таблице перекодировки дает смещение фазы кода, которое затем суммируется со сдвигом интерполяции для формирования оценки местоположения максимума. Однако должно быть понятно, что возможны варианты, в которых обращение к таблице перекодировки непосредственно дает оценку местоположения максимума.
Пример такой таблицы перекодировки представлен на фиг.9. В этом конкретном примере таблица перекодировки имеет 129 записей, ассоциированных с табличными индексами от 0 до 128. Запись, соответствующая значению 0 индекса, обозначена ссылочной позицией 902а; запись, соответствующая значению 1 индекса, обозначена ссылочной позицией 902b; запись, соответствующая значению 2 индекса, обозначена ссылочной позицией 902с; и запись, соответствующая значению 128 индекса, обозначена ссылочной позицией 902d.
Следующее уравнение отображает сдвиг интерполяции interp_offset на табличный индекс lut_index:
lut_index =(int)((interp_offset+0.5)*(lut_size-1)) (1)
где int - целочисленная функция, lut_size - размер таблицы перекодировки. В этом конкретном примере lut_size равен 129. Для значений сдвига интерполяции в диапазоне от -0,5 до +0,5 это выражение дает значения индекса от 0 до 128.
Во втором примере сдвиг интерполяции является отклонением между местоположениями интерполированного и действительного максимумов корреляционной функции по измерению, соответствующему доплеровской частоте. Смещение доплеровской частоты взаимосвязано с этим сдвигом интерполяции, что показано на фиг.10. Сдвиг интерполяции обозначен ссылочной позицией 1002, смещение доплеровской частоты обозначено ссылочной позицией 1004, и кривая, выражающая взаимосвязь между этими двумя переменными, обозначена ссылочной позицией 1006. Можно видеть, что для сдвига интерполяции в пределах от -0,5 до +0,5 смещение доплеровской частоты находится в пределах от -2 до +2 Гц.
В одной реализации этого примера соотношение между сдвигом интерполяции и смещением доплеровской частоты реализовано в виде таблицы перекодировки. С использованием этой таблицы перекодировки смещение доплеровской частоты определяется в соответствии со сдвигом интерполяции. Смещение доплеровской частоты добавляется к сдвигу интерполяции для формирования оценки местоположения максимума по измерению, соответствующему доплеровской частоте. В этом конкретном примере оценка выражается через смещение доплеровской частоты между дискретизированным и действительным максимумами, но должно быть понятно, что возможны другие формы выражения оценки, например в форме смещения между интерполированным и действительным максимумами. Более того, в этом конкретном примере обращение к таблице перекодировки дает смещение доплеровской частоты, но должно быть понятно, что возможны варианты, в которых обращение к таблице перекодировки дает непосредственно оценку местоположения максимума.
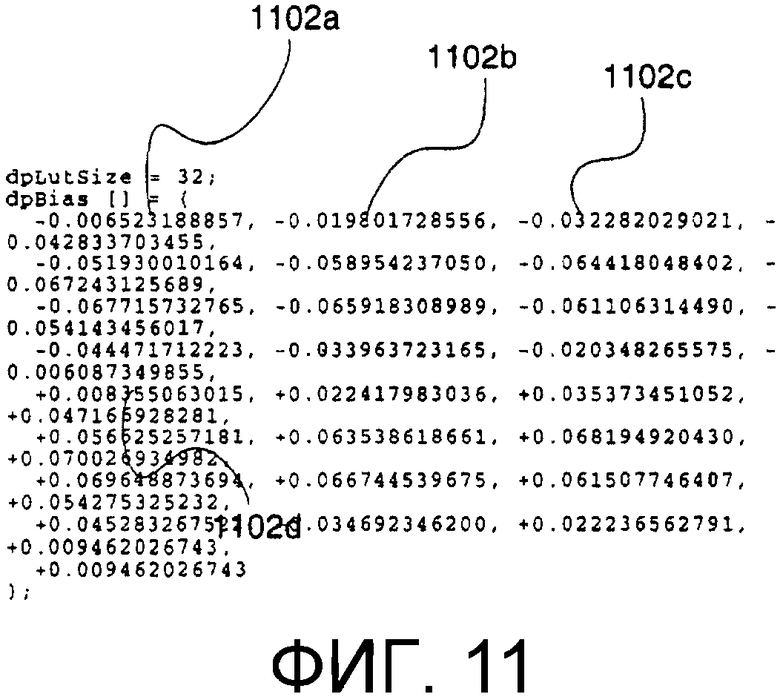
Пример такой таблицы перекодировки представлен на фиг.11. В этом конкретном примере таблица перекодировки имеет 33 записи, ассоциированные с табличными индексами от 0 до 32. Табличная запись, соответствующая значению 0 индекса, обозначена ссылочной позицией 1102а; табличная запись, соответствующая значению 1 индекса, обозначена ссылочной позицией 1102b; табличная запись, соответствующая значению 2 индекса, обозначена ссылочной позицией 1102с; и табличная запись, соответствующая значению 32 индекса, обозначена ссылочной позицией 1102d.
Записи таблицы, показанной на фиг.11, выражены в элементах доплеровской частоты, а не в Гц. Соотношение между размером элемента доплеровской частоты и Гц в этом примере зависит от установки Nc. В случае, когда Nc установлено на 20 мс, размер элемента доплеровской частоты равен 25 Гц. Приведенное выше уравнение (1) при lut_size, установленном на 33, отображает сдвиг интерполяции на табличный индекс.
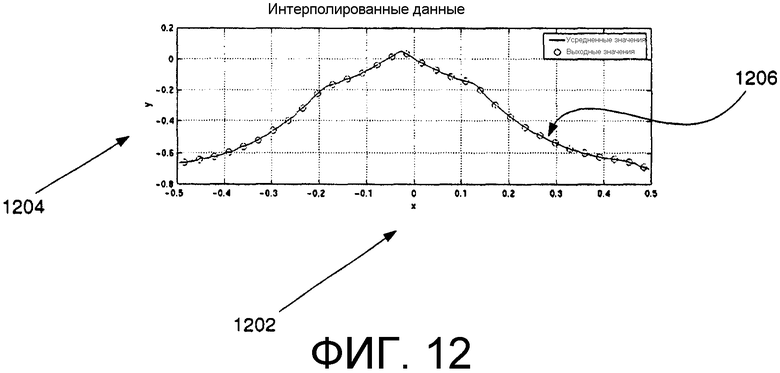
В третьем примере сдвиг интерполяции вновь равен отклонению между местоположениями интерполированного и дискретизированного максимумов по измерению, соответствующему фазе кода. Смещение энергии максимума взаимосвязано с этим сдвигом интерполяции, как показано на фиг.12. Ссылочная позиция 1202 обозначает сдвиг интерполяции, ссылочная позиция 1204 обозначает смещение энергии максимума, и ссылочная позиция 1206 обозначает кривую, которая воплощает предварительно установленное соотношение между этими двумя переменными. Смещение энергии максимума выражено через С/N0 в единицах дБ-Гц. Можно видеть, что для сдвига интерполяции в диапазоне от -0,5 до +0,5 смещение энергии максимума находится в пределах от - 0,69 до +0,14.
В одной реализации этого примера это соотношение реализовано в виде таблицы перекодировки. С использованием этой таблицы перекодировки определяется смещение энергии максимума, которое соответствует сдвигу интерполяции. Это смещение энергии максимума добавляется к интерполированной энергии максимума для формирования оценки энергии действительного максимума.
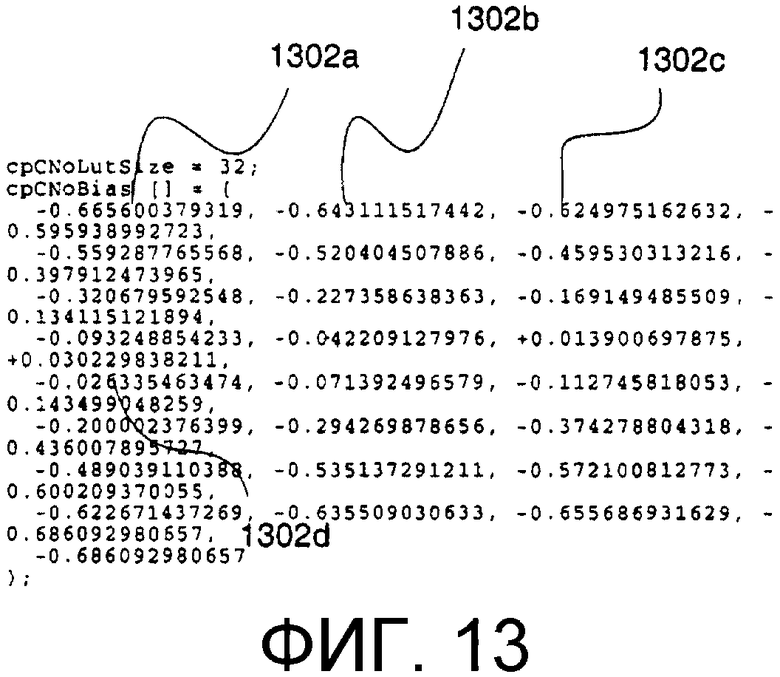
Пример такой таблицы перекодировки представлен на фиг.13. В этом конкретном примере таблица перекодировки имеет 33 записи, ассоциированные с табличными индексами от 0 до 32. Запись, соответствующая значению 0 индекса, обозначена ссылочной позицией 1302а; запись, соответствующая значению 1 индекса, обозначена ссылочной позицией 1302b; запись, соответствующая значению 2 индекса, обозначена ссылочной позицией 1302с; и запись, соответствующая значению 32 индекса, обозначена ссылочной позицией 1302d. Уравнение (1) отображает сдвиг интерполяции на табличный индекс.
В этом конкретном примере обращение к таблице перекодировки дает смещение энергии максимума, которая затем добавляется к энергии интерполированного максимума для формирования оценки энергии действительного максимума, но должно быть понятно, что возможны варианты, в которых обращение к таблице перекодировки дает непосредственно оценку энергии действительного максимума. Более того, возможны варианты, когда оценка энергии действительного максимума формируется путем суммирования смещения энергии максимума с энергией дискретизированного максимума.
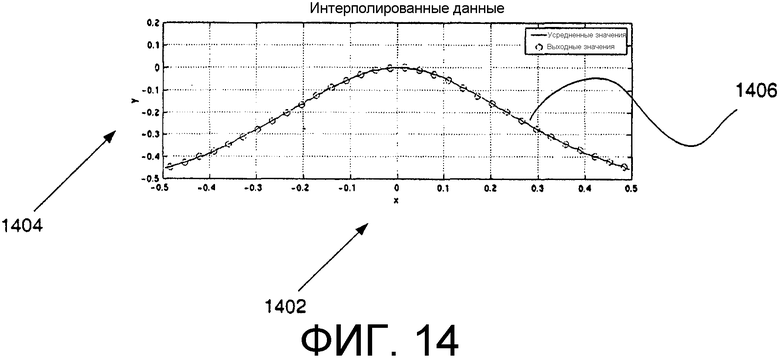
В четвертом примере сдвиг интерполяции является отклонением между местоположениями интерполированного и дискретизированного максимумов по измерению, соответствующему доплеровской частоте. Смещение энергии максимума взаимосвязано с этим сдвигом интерполяции, как показано на фиг.14. Ссылочная позиция 1402 обозначает сдвиг интерполяции, ссылочная позиция 1404 обозначает смещение энергии максимума, и ссылочная позиция 1406 обозначает кривую, которая воплощает соотношение между этими двумя переменными. Можно видеть, что для сдвига интерполяции в диапазоне от -0,5 до +0,5 смещение энергии максимума, которое в этом конкретном примере выражено через С/N0 в единицах дБ-Гц, находится в пределах от -0,45 до 0.
В одной реализации этого примера соотношение между этими двумя переменными реализовано в виде таблицы перекодировки. С использованием этой таблицы перекодировки определяется смещение энергии максимума, которое соответствует сдвигу интерполяции. Это смещение энергии максимума добавляется к энергии интерполированного максимума для формирования оценки энергии действительного максимума.
Пример такой таблицы перекодировки представлен на фиг.15. В этом конкретном примере таблица перекодировки имеет 33 записи, ассоциированные с табличными индексами от 0 до 32. Запись, соответствующая значению 0 индекса, обозначена ссылочной позицией 1502а; запись, соответствующая значению 1 индекса, обозначена ссылочной позицией 1502b; запись, соответствующая значению 2 индекса, обозначена ссылочной позицией 1502с; и запись, соответствующая значению 32 индекса, обозначена ссылочной позицией 1502d. Уравнение (1), приведенное выше, отображает сдвиг интерполяции на табличный индекс.
В этом конкретном примере обращение к таблице перекодировки дает смещение энергии максимума, которая затем добавляется к энергии интерполированного максимума для формирования оценки энергии действительного максимума, но должно быть понятно, что возможны варианты, в которых обращение к таблице перекодировки дает непосредственно оценку энергии действительного максимума. Более того, возможны варианты, когда оценка энергии действительного максимума формируется путем суммирования смещения энергии максимума с энергией дискретизированного максимума.
Вариант осуществления системы для оценки параметра локальных максимумов или минимумов иллюстрируется на фиг.16. Как показано, система содержит процессор 1602 и память 1604. Память 1604 физически воплощает последовательность команд для выполнения способа по фиг.7 или любой из вариантов осуществления, реализаций или примеров, которые описаны выше или предполагаются. Процессор конфигурируется для обращения и исполнения команд программного обеспечения, физически воплощенных посредством памяти 1604.
В одной реализации, в которой оценка параметра или смещение взаимосвязано со сдвигом интерполяции, что воплощено в виде таблицы перекодировки, таблица перекодировки сохранена в памяти 1604 и доступна для обращений процессора 1602 с целью определения оценки параметра или смещения, соответствующего конкретному значению сдвига интерполяции.
Вариант осуществления абонентской станции в беспроводной системе связи показан на фиг.17. Эта конкретная абонентская станция конфигурирована для воплощения или реализации системы по фиг.16.
Приемопередатчик 1706 радиосвязи выполнен с возможностью модулирования информации в полосе частот модулирующих сигналов, в частности речи или данных, для переноса ее на радиочастотную несущую, и демодулирования модулированной радиочастотной несущей для получения информации полосы частот модулирующих сигналов.
Антенна 1710 выполнена с возможностью передачи модулированной радиочастотной несущей по каналу беспроводной радиосвязи и приема модулированной радиочастотной несущей по каналу беспроводной радиосвязи.
Процессор 1708 сигналов полосы модулирующих частот выполнен с возможностью выдачи информации полосы частот модулирующих сигналов с устройства ввода в пользовательском интерфейсе 1716 в приемопередатчик 1706 для передачи по беспроводному каналу радиосвязи. Процессор 1708 сигналов полосы модулирующих частот также предназначен для выдачи информации полосы модулирующих частот с приемопередатчика 1706 в устройство вывода в пользовательском интерфейсе 1716.
Пользовательский интерфейс 1716 содержит множество устройств для ввода или вывода пользовательской информации, такой как речь или данные. Устройства, в типовом случае включенные в пользовательский интерфейс, включают в себя клавиатуру, экран дисплея, микрофон и динамик.
GPS-приемник 1712 выполнен с возможностью приема и преобразования с понижением частоты передаваемых сигналов спутниковой системы GPS и выдачи преобразованного с понижением частоты информационного сигнала на коррелятор 1718.
Коррелятор 1718 обеспечивает получение корреляционной функции GPS-сигнала из информационного сигнала, поданного на него GPS-приемником 1712. Для заданного ПШ-кода коррелятор 1720 формирует корреляционную функцию, которая определяется по измерению, соответствующему фазе кода, и по измерению, соответствующему доплеровской частоте. По измерению, соответствующему фазе кода, корреляционная функция определяется по диапазону фаз кода, которые определяют окно W поиска. По измерению, соответствующему доплеровской частоте, корреляционная функция определяется по множеству элементов доплеровской частоты. Каждое отдельное определение корреляционной функции выполняется в соответствии с определенными параметрами когерентного и некогерентного интегрирования (Nc, M).
Коррелятор 1718 может быть конфигурирован для получения связанной с пилот-сигналом корреляционной функции из информации, относящейся к пилот-сигналам, выдаваемым на него приемопередатчиком 1706. Эта информация используется абонентской станцией для получения услуг беспроводной связи.
Канальный декодер 1720 обеспечивает декодирование канальных символов, выдаваемых на него процессором 1708 полосы частот модулирующих сигналов, для восстановления из них информации источника. В одном примере, использующем канальные символы со сверточным кодированием, канальный декодер представляет собой декодер Витерби. В другом примере, где канальные символы представляют собой последовательно или параллельно конкатенированные сверточные коды, канальный декодер 1720 является турбодекодером.
Память 1704 предназначена для хранения команд программного обеспечения, воплощающих способ по фиг.7 или любому из его вариантов осуществления, реализаций или примеров, описанных выше или предполагаемых. Центральный процессорный блок 1702 предназначен для обращения к этим командам программного обеспечения и исполнения их для оценки параметров локальных максимумов или минимумов в корреляционных функциях GPS-сигналов, выданных на него коррелятором 1718.
Память 1704 также предназначена для хранения таблиц перекодировки, реализующих предварительно установленные соотношения между ошибкой интерполяции и оценкой или смещением параметра. В одном примере центральный процессорный блок 1702 конфигурирован для обращения к этим таблицам перекодировки и использования их для определения оценки или смещения параметра, которые соответствуют конкретному сдвигу интерполяции.
Центральный процессорный блок 1702 конфигурирован для анализа корреляционных функций GPS-сигналов, выданных на него коррелятором 1718, для выделения их локальных максимумов или минимумов и для оценки параметров этих локальных максимумов или минимумов или соотношения с ними с использованием способа по фиг.7 или любого из его вариантов, которые описаны или предполагаются.
Центральный процессорный блок 1702 также конфигурирован для получения измеренных значений времени и доплеровской частоты из этих параметров. Кроме того, в одном варианте осуществления центральный процессорный блок 1702 конфигурирован для определения среднеквадратичной ошибки (СКО), связанной с каждым из измеренных значений. В этом варианте осуществления эти результаты измерения и значения СКО подаются в пункт определения местоположения (не показан). Пункт определения местоположения взвешивает каждое из измеренных значений на основе инверсного значения соответствующего ему значения СКО и затем оценивает местоположение и скорость абонентской станции на основе этих взвешенных измеренных значений. Альтернативно абонентская станция определяет из этой информации свое собственное местоположение и скорость.
Хотя выше описаны различные варианты осуществления, реализации и примеры, для специалистов в данной области техники должно быть понятно, что возможны различные другие варианты осуществления, реализации и примеры, входящие в общем настоящего изобретения. В частности, возможны варианты осуществления, в которых изобретение используется для оценки параметров локальных максимумов или минимумов функций иных, чем корреляционные функции, или корреляционных функций, полученных из сигналов, переданных базовыми станциями в системах беспроводной связи, включая всенаправленные базовые станции и отдельные сектора в многосекторной сотовой ячейке, или корреляционных функций, полученных из сигналов, переданных в гибридных системах, использующих комбинации базовых станций и спутников системы GPS. Кроме того, возможны варианты осуществления, в которых оценивается одновременно более одного параметра локальных максимумов или минимумов функции. Следовательно, изобретение не должно быть ограничено ничем, кроме прилагаемой формулы изобретения.

Заявлены способ и система для оценки параметров локальных максимумов или минимумов корреляционной функции, полученной из принимаемого сигнала. Сущность изобретения заключается в том, что определяют интерполированные локальные максимумы или минимумы, определяют сдвиг интерполяции, представляющий собой отклонение между местоположениями локальных максимумов или минимумов интерполированных и дискретизированных локальных максимумов или минимумов корреляционной функции, из сдвига интерполяции получают оценку соответствующего параметра. Достигаемым техническим результатом является повышение точности оценки местоположения объектов на основе Системы глобального позиционирования (GPS). 4 н. и 44 з.п. ф-лы, 17 ил.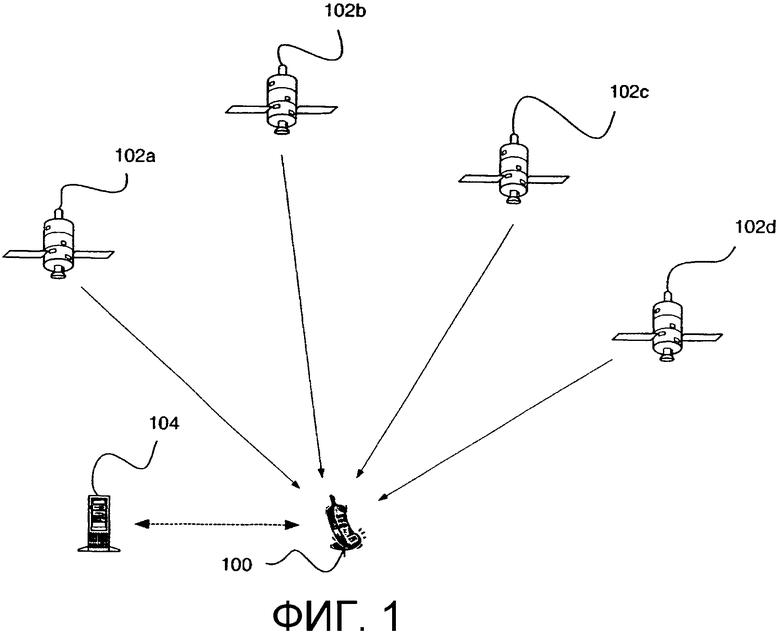
| B.W.PARKINSON, J.J.SPILKER | |||
| Global Positioning System Theory and Applications | |||
| Volume l, American Institute of Aeronautics and Astronautics, Inc., 1996, p.95 | |||
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| RU 94018148 A1, 20.03.1996 | |||
| US 4918609, 17.04.1990 | |||
| АППАРАТ ДЛЯ НЕПРЕРЫВНОЙ ОБРАБОТКИ ТЕКСТИЛЬНЫХ НИТЕЙ ГАЗООБРАЗНЫМИ АГЕНТАМИ ПОД ДАВЛЕНИЕМ | 0 |
|
SU242115A1 |
| US 5774601 A, 30.06.1998. | |||

