Изобретение относится к первичной обработке лубяных волокон и может быть применено в трясильных машинах с приводом гребенных валиков посредством дезаксиального четырехзвенного механизма для регулирования угла опережения.
В существующих трясильных машинах (ТГ-135Л) с приводом гребенных валиков дезаксиальным четырехзвенным механизмом (Марков В.В. Первичная обработка лубяных волокон, М., Легкая индустрия, 1974, с.357-358), где регулирование угла опережения осуществляется смещением биссектрисы угла размаха иглы в пространстве за счет изменения длины шатуна, регулировка осуществляется муфтой, связывающей две части шатуна, имеющие на соединяемых концах левую и правую резьбу. Это конструктивное решение имеет недостаток, заключающийся в том, что наличие регулировочной муфты у шатуна, совершающего плоскопараллельное движение, увеличивает его массу, следствием чего является увеличение динамических нагрузок в сопряжениях приводного механизма, которые обуславливают снижение его надежности, увеличение потребляемой мощности, шума и вибрации при работе машины. Например, для ТГ-135Л при массе муфты 2,1 кг силы инерции, действующие в продольном кривошипу направлении, подсчитанные по формуле Fd=mω2r=2,1·252·0,05=65,63Н.
Технической задачей изобретения является обеспечение регулирования угла опережения при снижении массы подвижных частей привода. Технический результат, заключающийся в устранении указанных недостатков в приводе гребенных валиков трясильной машины, содержащем четырехзвенный механизм, достигается тем, что четырехзвенный механизм является дезаксиальным, шатун выполнен с возможностью смещения относительно гребенных валиков посредством крепления шатуна к планке, соединяющей поводки гребенных валиков для его смещения вдоль этой планки или посредством крепления вала кривошипа, выполненного с возможностью смещения ведущего вала машины вдоль базовых поверхностей, на которых этот вал крепится. Крепление шатуна к планке, соединяющей поводки гребенных валиков, может быть выполнено с возможностью смещения шатуна вдоль планки при ослаблении их болтового соединения.
Изменение положения оси кривошипа может осуществляться перемещением с помощью регулировочного винта корпусов подшипников ведущего вала машины вдоль базовых поверхностей на станине машины (горизонтальных, как в машине ТЛ-135 или у вертикальных, как в машине ТГ-135).
Сказанное поясняется чертежом, где показан вид приводного дезаксиального четырехзвенного механизма трясильной машины. Здесь обозначено: 1 - гребенной валик с закрепленным на валу поводком; 2 - планка, соединяющая поводки гребенных валиков; 3 - шатун; 4 - кривошип; 5 - ведущий вал машины.
Регулирование осуществляется изменением положения кривошипа 4 за счет продольного смещения крепления к планке 2, соединяющей поводки гребенных валиков 1 либо за счет смещения оси вращения ведущего вала машины 5.
Возможность изменения угла опережения смещением биссектрисы угла размаха иглы в пространстве посредством изменения положения шатуна относительно гребенных валиков показана в [3], где приводится вывод зависимости, связывающей геометрические параметры дезаксиального четырехзвенного механизма привода трясильной машины с величиной угла опережения

где λ=arctg(H/B),
r - длина кривошипа;
l - длина поводка;
Ld - длина шатуна;
Н - вертикальное смещение оси кривошипа;
В - горизонтальное смещение оси кривошипа;
α - угол опережения;
ψ - угол наклона решетки к горизонту.
Предложенное решение позволяет снизить массу подвижных элементов привода, следовательно, уменьшить динамические нагрузки, повысить надежность, снизить потребление энергии, шум и вибрации при работе машины.
Регулирование угла опережения путем смещения ведущего звена приводного механизма позволит осуществлять регулировку в процессе трясения, что дает возможность автоматизировать процесс.
Литература
1. Марков В.В. и др. Первичная обработка лубяных волокон. - М.: Легкая индустрия, 1974.
2. Дьячков В.А. Проектирование машин для первичной обработки лубяных волокон. - Кострома: КГТУ, 2000. - 208 с., ил.
3. Ширшов И.А. Определение угла опережения в трясильных машинах с нижним гребенным полем. - Ж. "Вестник КГТУ", № 13, с.56..60.
Привод гребенных валиков трясильной машины содержит четырехзвенный механизм, который является дезаксиальным, шатун выполнен с возможностью смещения относительно гребенных валиков посредством крепления шатуна к планке, которая соединяет поводки гребенных валиков для его смещения вдоль этой планки, или посредством крепления вала кривошипа, который выполнен с возможностью смещения ведущего вала машины вдоль базовых поверхностей, на которых этот вал крепится. Использование данного изобретения позволяет регулировать угол опережения при снижении массы подвижных частей привода. 1 ил.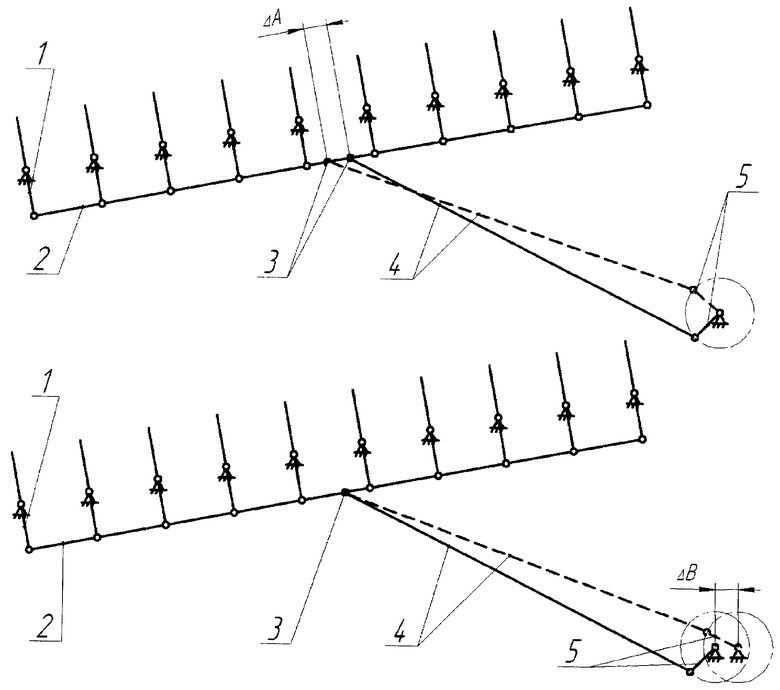
Привод гребенных валиков трясильной машины, содержащий четырехзвенный механизм, отличающийся тем, что четырехзвенный механизм является дезаксиальным, шатун выполнен с возможностью смещения относительно гребенных валиков посредством крепления шатуна к планке, соединяющей поводки гребенных валиков для его смещения вдоль этой планки или посредством крепления вала кривошипа, выполненного с возможностью смещения ведущего вала машины вдоль базовых поверхностей, на которых этот вал крепится.
| МАРКОВ В.В | |||
| Первичная обработка лубяных волокон | |||
| - М.: Легкая индустрия, 1974, с.357-358 | |||
| Устройство для обработки отходов трепания лубяных культур | 1981 |
|
SU996531A1 |
| Трясильное устройство | 1988 |
|
SU1564206A1 |
| Устройство для получения короткого лубяного волокна | 1987 |
|
SU1498830A1 |
| Устройство для трясения лубяных волокон | 1985 |
|
SU1379351A1 |
| 0 |
|
SU158257A1 | |
| Способ изготовления гипсовых изделий | 1986 |
|
SU1393819A1 |

