Изобретение относится к техническим средствам автоматизации и может быть использовано в пневматических и гидравлических системах автоматического управления.
В процессе работы пневматических и гидравлических механизмов возвратно-поступательного движения контроль крайних положений, как правило, осуществляется с помощью конечных выключателей (см., например, «Струйные логические элементы и устройства автоматического управления технологическим оборудованием». Отраслевой каталог. Под ред. Э.И. Чаплыгина, М.: ВНИИТЭМР, 1989, стр.47, рис.103) или датчиков давления (см., например. Авторское свидетельство №1180565, кл. F15В 15/28 «Цилиндр с датчиком крайних положений поршня», бюл. №35 от 23.09.85).
Известны механизмы, в которых контролируются промежуточные положения исполнительного органа. Контроль может осуществляться с помощью ряда датчиков, установленных на перемещающемся органе и воздействующих, например, на неподвижный контакт (Авторское свидетельство №1826637, кл. F15В 15/28, «Гидроцилиндр с индикацией положения», бюл. №20 от 20.07.95) или с помощью одного перемещающегося конечного выключателя, на который воздействуют упоры, предварительно установленные в заданных положениях (Авторское свидетельство №339907, кл. G05b 19/44, «Гидравлическое программное устройство», бюл. №17 от 01.01.72).
Недостатком этих устройств является их сложность и возможность получения информации только в точках, определяемых положением датчиков или упоров, причем с увеличением числа контролируемых промежуточных положений исполнительного органа сложность конструкции возрастает.
Наиболее близким к предлагаемому изобретению по совокупности признаков является исполнительный механизм с датчиками крайних положений поршня, содержащий цилиндр и поршень со штоком, установленный в цилиндре, с образованием поршневой и штоковой полостей, каждая из которых имеет подводящий канал (Авторское свидетельство №1386762, кл. F15В 15/28, «Исполнительный механизм с датчиком крайних положений поршня», бюл. №13 от 07.04.88).
Недостатком этого устройства является его сложность и возможность получения информации при останове поршня только в крайних положениях.
Техническим результатом предлагаемого технического решения является упрощение конструкции и повышение надежности, а также повышение функциональных возможностей.
Указанный технический результат достигается тем, что исполнительный механизм с индикацией окончания перемещения поршня, содержащий цилиндр и поршень со штоком, установленный в цилиндре, с образованием штоковой и поршневой полостей, каждая из которых имеет подводящий канал, снабжен двумя струйными дискретными моностабильными элементами, причем вход первого струйного дискретного моностабильного элемента связан с подводящим каналом штоковой полости, а вход второго струйного дискретного моностабильного элемента связан с подводящим каналом поршневой полости. Введение струйного дискретного моностабильного элемента, вход которого связан с подводящим каналом штоковой полости, позволяет получить информацию при останове поршня в произвольном положении в процессе втягивания штока поршня. Введение струйного дискретного моностабильного элемента, вход которого связан с подводящим каналом поршневой полости, позволяет получить информацию при останове поршня в произвольном положении в процессе выдвижения штока поршня.
На фигуре изображен исполнительный механизм с индикацией окончания перемещения поршня.
Исполнительный механизм с индикацией окончания перемещения поршня содержит цилиндр 1, поршень 2 со штоком, установленный в цилиндре 1 с образованием штоковой полости 3 и поршневой полости 4. Поршневая полость 4 имеет подводящий канал 5, а штоковая полость 3 - подводящий канал 6. Подводящий канал 5 сообщается с входом струйного дискретного моностабильного элемента 7, имеющего прямой 8 и инверсный 9 выходы. Подводящий канал 6 сообщается с входом струйного дискретного моностабильного элемента 10, имеющего прямой 11 и инверсный 12 выходы.
Исполнительный механизм с индикацией окончания перемещения поршня работает следующим образом.
После подачи питающей среды по подводящему каналу 5 в поршневую полость 4 начнется перемещение поршня 2 и выдвижение штока. Часть рабочей среды, вытесняемой поршнем 2 из штоковой полости 3, через подводящий канал 6 поступает на вход струйного дискретного моностабильного элемента 10. В результате произойдет переключение этого элемента, и питающий поток из инверсного выхода 12 перебросится в прямой выход 11. При остановке поршня 2 в крайнем положении или в произвольном промежуточном положении, которое может определяться любым устройством, препятствующим выдвижению штока поршня 2, истечение рабочей среды в подводящий канал 6 прекращается. Питающий поток из прямого выхода 11 струйного дискретного моностабильного элемента 10 перебрасывается в инверсный выход 12.
Таким образом, после окончания выдвижения штока поршня 2, то есть при останове поршня 2 в крайнем или любом промежуточном положении, на инверсном выходе 12 струйного дискретного моностабильного элемента 10 происходит смена сигнала нулевого уровня на сигнал единичного уровня. Эта информация в совокупности с логическим сигналом на выдвижение штока поршня 2 может быть использована управляющим устройством для формирования управляющих команд, например, на смену операции (продолжение цикла) или возврат поршня 2 в исходное положение.
При подаче питающей среды по подводящему каналу 6 в штоковую полость 3 начнется перемещение поршня 2 и втягивание штока. Часть рабочей среды, вытесняемой поршнем 2 из поршневой полости 4, через подводящий канал 5 поступает на вход струйного дискретного моностабильного элемента 7. В результате произойдет переключение этого элемента, и питающий поток из инверсного выхода 9 перебросится в прямой выход 8. При остановке поршня 2 истечение рабочей среды в подводящий канал 5 прекращается. Питающий поток из прямого выхода 8 струйного дискретного моностабильного элемента 7 перебрасывается в инверсный выход 9.
Таким образом, после окончания втягивания штока поршня 2 на инверсном выходе 9 струйного дискретного моностабильного элемента 7 происходит смена сигнала нулевого уровня на сигнал единичного уровня. Эта информация в совокупности с логическим сигналом на втягивание штока поршня 2 также может быть использована управляющим устройством для формирования управляющих команд.
Исполнительный механизм с индикацией окончания перемещения поршня обладает широкими функциональными возможностями. Это обусловлено тем, что после останова поршня происходит формирование команды на последующие действия при любом положении поршня и без использования датчиков положения. Исключение из процесса управления датчиков положения упрощает конструкцию и повышает надежность. Функцию датчиков положения в данном исполнительном механизме выполняют струйные дискретные моностабильные элементы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2007 |
|
RU2350791C1 |
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2010 |
|
RU2427874C1 |
| СТРУЙНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОЦИЛИНДРОМ | 2007 |
|
RU2355011C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПОЛОСТНЫМ ГИДРОЦИЛИНДРОМ | 2005 |
|
RU2282761C1 |
| Выносная опора грузоподъемной машины | 1990 |
|
SU1736909A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| Гидропривод | 1980 |
|
SU885641A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА | 2003 |
|
RU2250828C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
Механизм предназначен для использования в пневматических системах автоматического управления. Исполнительный механизм с индикацией окончания перемещения поршня содержит цилиндр, поршень со штоком, установленный в цилиндре с образованием поршневой и штоковой полостей, каждая из которых имеет подводящий канал. Предлагаемый исполнительный механизм отличается от известных тем, что он снабжен двумя струйными дискретными моностабильными элементами, причем вход первого струйного дискретного моностабильного элемента связан с подводящим каналом штоковой полости, а вход второго струйного дискретного моностабильного элемента связан с подводящим каналом поршневой полости. Техническим результатом является упрощение конструкции и повышение надежности, а также повышение функциональных возможностей. 1 ил.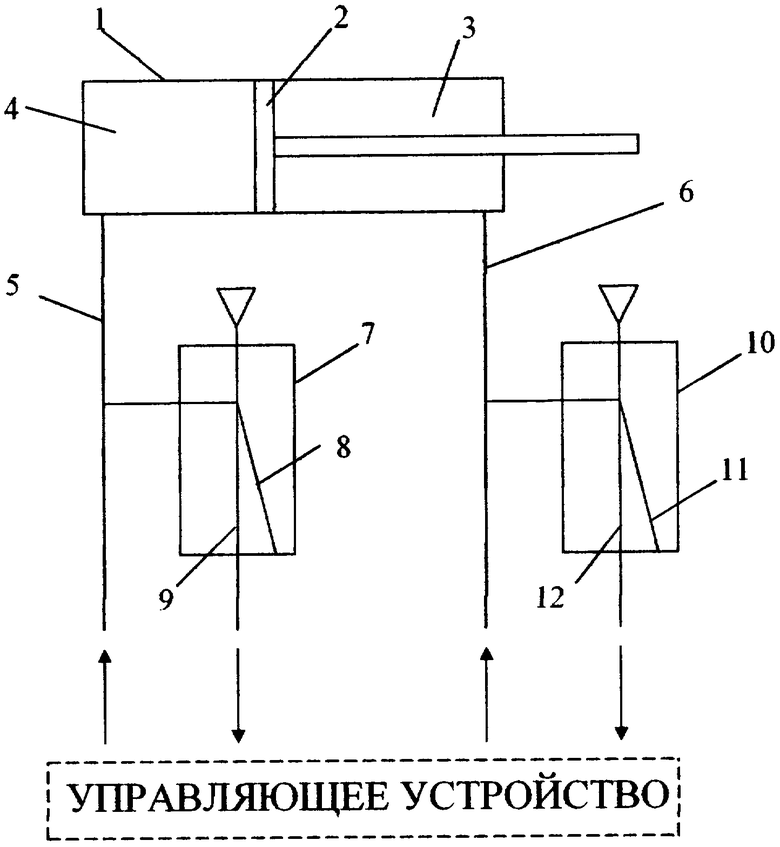
Исполнительный механизм с индикацией окончания перемещения поршня, содержащий цилиндр, поршень со штоком, установленный в цилиндре с образованием поршневой и штоковой полостей, каждая из которых имеет подводящий канал, отличающийся тем, что он снабжен двумя струйными дискретными моностабильными элементами, причем вход первого струйного дискретного моностабильного элемента связан с подводящим каналом штоковой полости, а вход второго струйного дискретного моностабильного элемента связан с подводящим каналом поршневой полости.
| Исполнительный механизм с датчиком крайних положений поршня | 1986 |
|
SU1386762A1 |
| Цилиндр с датчиком крайних положений поршня | 1984 |
|
SU1180565A1 |
| Струйный преобразователь частоты | 1977 |
|
SU641429A1 |
| DE 10312868 A1, 21.10.2004 | |||
| ГАЗОВАЯ ПЛИТА | 2000 |
|
RU2188984C2 |

